Embed Size (px)
Citation preview
ELSEVIER
Real-time implementation of electromyogram pattern recognition as a control command of man-machine interface
Gwo-Ching Chang”, Wen-Juh Kang*, Jer-Junn Luh*, Cheng-Kung Chengt, JinShin Laix, Jia-Jin J. Chen§ and Te-Son Kuo*
*Department of Electrical Engineering, National Taiwan University; tInstitute of Biomedical Engineering, National Yang Ming University; IDepartment of Physical Medicine and Rehabilitation, College of Medicine, National Taiwan University, 7 Chun-Shan South Road, Taipei, Taiwan 100; SInstitute of Biomedical Engineering, National Cheng Kung University Taiwan, ROC
ABSTRACT The purpose of this .study was to deuelop a real-time electromnyogram (EMG) discrimination system to pro7ride control
rommnnds for man-machine interface app1ication.s. A host computer with n plugin data arquisition and prnressinC~
bortrd rontaining a ?izIs32Oc31 Joatingpoint digital signal processor 71~1s used to attain rea&‘me EMG clussjfi-
ration. Twochannel EMG signals mere rollerted by tmo pairs of surface elertrodes located bilaterally between the
,sternorleidomnstoid and the up@r trapaius. I&e motions of the neck and shoulders were discriminated ,for each
subjert. The zerocrossing rate was employed to detert the onset of nut& contraction. The reps&al coef@ents. deri~l
,from autorepssiue roef‘cients and es&ated by a recursive least square &orithm, were used as the recognition
.feature.s. These features were then discriminated using a modiJied maximum likelihood distance clussifipL The toted
re.$on.se time 0fthi.r IiMG discrimination system was achieved about within 0.17 s. Four ablebodied and two C5,~ti
qundriplegir subjects took part in the experiment. and achieved 95% mean recognition rute in discrimination between
thejive .sperific motions. The response time and the reliability of rerqpition indicate that this system has the potential
to di.rrriminnte body motions for man-machine inte$tre applications. Copynlght 0 1996 &v&r Srienre I.td /or
IIYMR.
Keywords: Real-time, electromyogram signal. pattern recognition, man-machine inter&-c. c-cpstral
cocfficirnt
Med. Eng. Phys., 1996, Vol. 18. 529-537, Octohel
INTRODUCTION
The electromyogram (EMG) signal is the electri- cal manifestation of the activation of motor units associated with a contracting muscle, and provides a potential resource for communication between the humans and machines. Different modes of muscle contraction are associated with various motions resulting from individual motor unit activity, thus the differences in EMG signatures are generated. EMG signal processing using pat- tern recognition based on the difference in EMG signatures can be used to recognize the subject’s intentions. Many research groups have utilized EMG signal discrimination as a natural way to pro- vide control commands for functional electrical stimulation’ .?? upper limb prosthesis”-‘. and dynamic computer controls. However, a successful
myoelectric control of the above devices requires reliable discrimination of various motions based on the characteristics of the surface EMG and instantaneous recognition. Therefore, a reliable and efficient calculation of the EMG signature and a hardware system to provide fast compu- tational capability are necessary for practical and real-time control applications.
Various representations of the EMG signature have been applied to solve the myoelectric control problems’-‘. . The simplest of these represen- tations is an estimate of the amplitude of the EMG signal to provide an on/off switching signal for a single-function prosthesis control”. However, this representation, which relies on signal power alone, is essentially limited to one degree of free- dom and thus is inapplicable to multifunctional control. Therefore, to develop a multifunctional control system, the multiple electrode sites have to be used. Obviously, the more electrode sites
Real-time EMG pattern recognition: GwoChing Chang et al.
used, the greater the mental burden placed on the operator. Statistical representations of the EMG signal such as mean absolute value, mean absolute value slope, and zero crossing have also been used by Hudgins et ~1.~ for multifunctional prosthesis control.
Because of the random nature of the raw EMG signals recorded from the surface of the skin, it is suitable to analyse the EMG signals as a stochastic process3,“. Graupe et al. 4 first proposed a time- series analysis of the raw EMG signal. They made use of autoregressive (AR) models to represent EMG signals. The EMG signal, after AR model- ling, results in a set of parameters which is repeat- able for a given mode of muscle contraction, but it is different from one mode of muscle contrac- tion to another. Based on parameter identifi- cation of an AR model of the EMG signal, they developed several prosthesis control systems using a single electrode-site between the biceps and tri- ceps muscles 4,1o-12. Doerschuk et ~1.~ extended the work of Graupe et al. lo-l2 by using a multichannel approach and taking advantage of the cross- correlation between channels to improve the dis- crimination performance. Similar approaches were also adopted by Hefftner et uZ.*, Triolo et uZ.‘, and Latwesen and Patterson13, because the para- metric representation of the EMG signature by the AR coefficients is more efficient in terms of utilizing the information content of the EMG sig- nal.
Another parametric representation, the cepstral coefficient, has been applied to speech reco nition applications 14,15. In our previous E- study’ , the characteristics of the cepstral coefficients in frequency domain and feature space were com- pared with those of the conventional AR coef- ficients when dealing with EMG signals. It was pointed out that the cepstral coefficients pos- sessed better cluster separability in feature space, and the more informative part in the frequency domain was emphasized. Thus, the cepstral coef- ficients used as a feature vector are more suitable than AR coefficients for EMG pattern recognition.
Various classifiers have been considered for EMG discrimination, such as a parallel-filtering classifier”,“, Bayesian discrimination analysis’ , and neural networks5*‘*. According to our pre- vious studyr6*lg, three classifiers (Euclidean dis- tance classifier, weighted distance classifier and modified maximum likelihood distance classifier) have been applied to EMG discrimination. It was indicated that the modified maximum likelihood distance (MMLD) classifier provides the best dis- crimination efficiency of the three classifiers.
Real-time processing may offer the important advantage of allowing the recognition results to be immediately available, thus making practical applications possible. In the practical hardware realization of the EMG signature discriminator, a lab-size 8-bit Intel 8080-based EMG signature identification system was first developed by Graupe et ~1.~ in 1973. However, the delay time of the above system was too long (about 1.5 s) for clinical use, owing to the slowness of the microprocessor employed4. In 1985, they con-
structed a portable EMG signature discrimination system based on a 16bit Motorola 68000 microprocessor, and the total response time of the system from the subject’s initiation of a command signal was about 0.2 s4. Although this delay is hardly noticeable in practice4, it may be further minimized by using faster microprocessors to pro- mote the performance of EMG discrimination sys- tem. In recent years, digital signal processors (DSP) have been developed and refined to pro- vide the computing power for most real-time applications. This class of device is actually a self- contained microprocessor with instruction sets and support circuitry that are designed for com- mon signal processing functions. Therefore, it is preferable to other general-purpose micropro- cessors for real-time signal processing appli- cations.
The aim of this study was to implement a DSP- based system with real-time EMG pattern recog- nition using cepstral features and a MMLD clas- sifier as a control command of the man- machine interface.
METHODS
The detection of the onset of muscle contraction is the primary step of automatic EMG pattern rec- ognition, and this method is first described in this section. Subsequently, the cepstral features esti- mation, MMLD classifier, and experimental design are described.
Detecting the onset of muscle contraction
Normal resting muscle shows no changes in potential, but contraction gives large changes in potential. The zero-crossing rate (ZCR) method for detection of the onset of muscle contraction is adopted in this study, because the arithmetic of the ZCR is uncomplicated and easy to implement. The ZCR is defined as the number of zero-cross- ings in a fixed data length. A threshold must be included in the ZCR calculation to reduce the zero-crossings induced by measurement noise. Assuming a measurement noise of 5 /JV from peak to peak and a system gain of 1000, this dead zone is calculated to be +5 mV measured at the input of the A/D converter. Given two successive samples, yk and y&r, and if:
yk* yk+l < o
and
then the ZCR value will increase. This algorithm will fail to count a zero-crossing if two successive samples of opposite sign fall within the dead zone.
For examining the onset of muscle contraction, a set of ZCR thresholds is empirically determined by taking 30-40% of the average ZCR. One cri- terion for determining whether the muscle is active is to check whether the ZCR exceeds an assigned ZCR threshold.
530

according to the above equation needs D multipli- cations, D divisions, 40-l additions, and D natu- ral logarithmic operations for &dimensional fea- ture space.
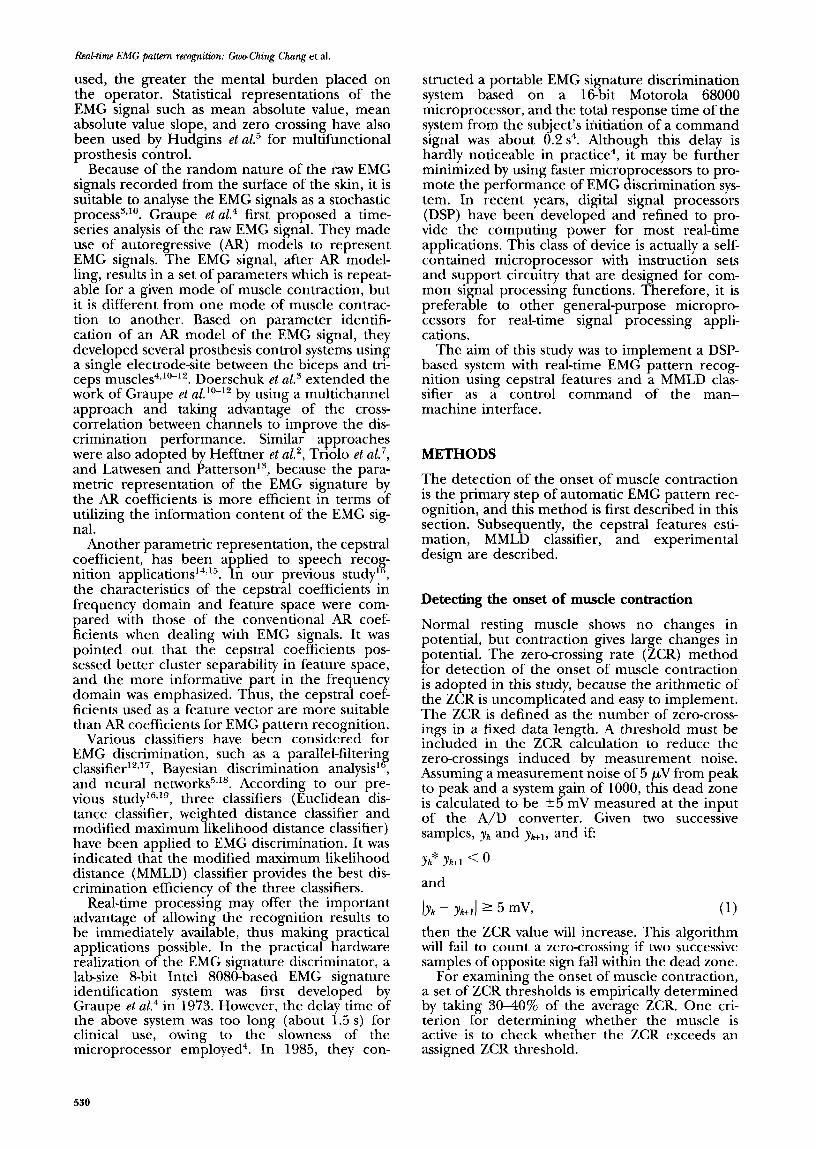
The reference feature space (m, v,,) is obtained by taking the average values of feature vectors with respect to numerous motions, several times over, to represent the generality of various motions. Because of the inconsistencies in the muscle acti- vation pattern, change of subjects. and small changes in electrode placement can cause vari- ations in the feature coefficient?. These slight variations will almost certainly influence the prob- ability of error in the classification process. The source discrepancy relating to inconsistencies in the muscle activation pattern may have its accu- racy enhanced by means of subject training’. How- ever, the sources of the variation arising from a change of subjects and small changes in the pos- itioning of electrode are common problems in the practical implementation of EMG pattern recog- nition. Therefore, the reference feature space must be constructed in accordance with the indi- vidual subject and specific electrode position. In this study, the reference feature space is estab- lished on-line to decrease the influence of source variations and to increase the discrimination rate. Therefore, prior to actual experimental testing, the subject performs each motion 10 times to yield the feature vectors (m,; v,,, . . ., u,,,}, (m,; ?$L’, . . . ., ZQ~J, . . ., (m,%,; 7!, ,%], . . . , 7~1,j,f) for motions 1 to A!!, which are stored in the memory of the EMG discrimination system. The experimental testing proceeds according to this established ref- erence feature space to identify a control com- mand state represented by the EMG signal. In dia- grammatic form, the principal operations of the EMG pattern recognition may he described as in Figure 1.
Cepstral analysis
The cepstral coefficients are defined as the inverse Fourier transform of the logarithm of the power spectrum of a signal. These coefficients can be obtained from the spectrum or from the linear prediction coefficients (LPC); both methods pro- vide similar results. However, the computational load with respect to LPC-based cepstrum is lower and, therefore, this method is used in this study. The LPC are equivalent to the coefficients of AR model in time-series analysis’O. Given the AR coef- ficients a, 1 5 i ‘p, the cepstral coefficients c, are obtained from the AR coefficients by the following recursive relationship’?
f, = -a,
f,, = -2 (1 - ii u/J,,-,< - n,, 1 < n 5 p. (2) kl ’ ‘Al
The parameter p is the AR model’s order. It can be determined by consideration of the partial auto-correlation function of the EMG signal or by examining whether the residual error e, is nearly white’,“. Many researchers using the AR model for EMG discrimination have suggested using a fourth-order mode13,4,,7,13. In our previous study’“, the decision on the model order p was investi- gated. It was shown that the fourth-order model provided a compromise between a high recog- nition rate and less computational load. There- fore, in this study, the EMG pattern recognition is based on the fourth-order model.
The AR coefficients (a;) can be estimated using Yule-Walker, Burg, covariance, and modified covariance methods in batch form” or least-mean square and recursive least square (RLS) algor- ithms in sequential form 22. Because the RLS algor- ithm is statistically efficient and exhibits near- optimum convergence rates, it is suitable for real- time signal processing and is used to estimate AR coefficients in this study. The mathematical rep- resentation of the RLS algorithm can be found in Ref. 22. The total number of computations needed to execute the RLS algorithm for each iteration is 2,’ + 4, multiplications, an approxi- mately equal number of additions, and one division.
Modified maximum likelihood distance classifier
The modified maximum likelihood distance from feature vector X, of unknown class to rth proto- type or reference class is given as follows’“+
where D is the feature space dimension; x, = [X*,,SCl?b . . .,xJ 7‘ and Xi; is the $h feature coef- ficient of Xi; m,= [m,,%, . . .,m1,J7- is the mean vector of the rth reference class; and v;~ is the vari- ance of the rth reference class in jth direction;
The smallest MMLD is used to define the unknown motion to which a particular movement belongs. The computation of the MMLD classifier
Experimental design
A primary motive of this study was to process EMG for use as an alternative pointing device to the computer mouse. As with the joystick or trackball, developing such a EMG discrimination system will have benefits for C5/6 quadriplegic patients who are unable to operate the mouse. To accomplish this, EMG signals were recorded from the sterno- cleidomastoid and the upper trapezius, which can still be consciously controlled by C5/6 quadri- plegic patients. Four able-bodied and two C5/6 quadriplegic subjects volunteered to take (part in the experiment. In our previous study’“.‘-, EMG discrimination for 10 motions of neck and should- ers was investigated. It has been shown that the five specific motions among the 10 motions are almost perfectly recognizable. Therefore, in this study, the five motions of the neck and shoulders were designated for each subject. The selected motions, as listed in Table 1, can usually be perfor- med by most individuals with C5/6 quadriplegia.
Two pairs of 8 mm diameter, silver-surface disc electrodes, were coated with a conductive paste and bilaterally located on the right and left sides of the neck. For each of the two differential elec-
531
Real-time EMG pattern recognition: Gwdhing Chang et al.
Figure 1 EMG pattern recognition scheme
Table 1 Five motions performed in the experiment
1. Head flexion (HF) 2. Head right rotation (HRR) 3. Head left rotation (HLR) 4. Right shoulder elevation @SE) 5. Left shoulder elevation (LSE)
trodes, one was located over the sternocleidomas- toid (one-third of the muscle length distal to the insertion) and the other over the upper trapezius (one-third of the muscle length distal to the origin). A ground electrode was attached to the right earlobe. The sternocleidomastoid is associ- ated with neck movements and the upper trapez- ius with shoulder movements. In this manner, the electrodes were placed directly over the dominant muscles associated with the predefined motions. When either muscle became active, the EMG sig- nal was detected by the nearest electrode. There- fore, the electrode arrangement provided a maximum pick-u Q region for the acquisition of EMG signals5s’6,24, 5.
A training programme was executed to improve the consistency of motion repetition for each test subject during the experimental period. The training programme remedially trained subjects in accordance with their special characteristics (such as inconsistent motions or combined motion) after the first testing. In testings, each subject repeated each specific motion 20 times. The correct recognition rate was calculated by counting the number of successful classifications. The recognition results for pretraining and post- training were compared.
EMG DISCRIMINATION SYSTEM
Hardware structure description
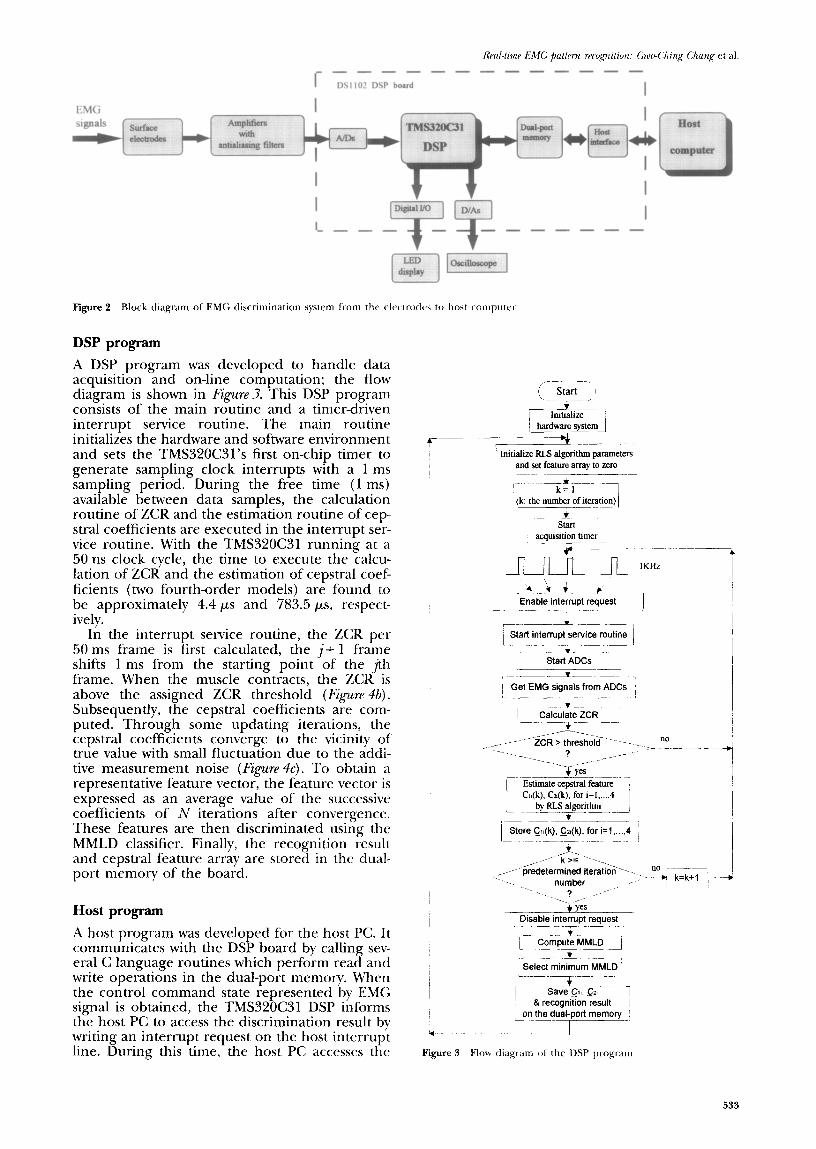
The schematic diagram of EMG discrimination system from electrodes to host computer is shown
532
in Figure 2. This system consists of three major parts: two channel differential preamplifiers (input impedance = 100 MLR, CMRR > ‘70 dB) with antialiasing filters (10 -300 Hz), a data acqui- sition and processing board (DS1102 manufac- tured by dSPACE International), and an IBM compatible personal computer (PC) with an Intel 80486 processor.
The DS1102 board contains a TMS320C31 DSP, a 128 kb X 32-bit dual-port memory, four ana- logue-to-digital (A/D) and digital-to-analogue (D/A) converters, and a digital I/O subsystem. The TMS320C31 is the central component of the EMG discrimination system. This is a 32-bit float- ing-point digital signal processor, capable of per- forming parallel multiply and arithmetic logic unit operations on floating-point or integer data in a single cycle (50 ns). It has 4 kb of on-chip program memory, 2 kb of on-chip data memory, one serial port, two timers, four external inter- rupts, and one direct memory access controller. Its architecture allows four levels of pipeline. While an instruction is being executed, the next three instructions are being consequently fetched, decoded, and read. With its fast computating capability, the TMS320C31 is suitable for the needs of this study.
The program and data transfers between host PC and ,TMS320C31 are through the dual-port memory configuration and a block of four 16bit registers as well as three S-bit registers. These registers are utilized to perform board set-ups, program downloads, and runtime data transfers. The dual-port memory can be accessed by the host PC while the TMS320C31 is running, thus allowing easy system development and monitor- ing. In addition, the DS1102 includes a bidirec- tional interrupt port which allows the DSP to request host interrupts and vice versa.
Rrcll-t2rnP EMG patkrn rrrognition: Grud:hing Chung et al.
l-
------e------
DS1102 DSP board I
EMG
si?itb e-
Figure 2 Block diagram of’ EMG discrimination system from the elec-trdes to host computet
DSP program
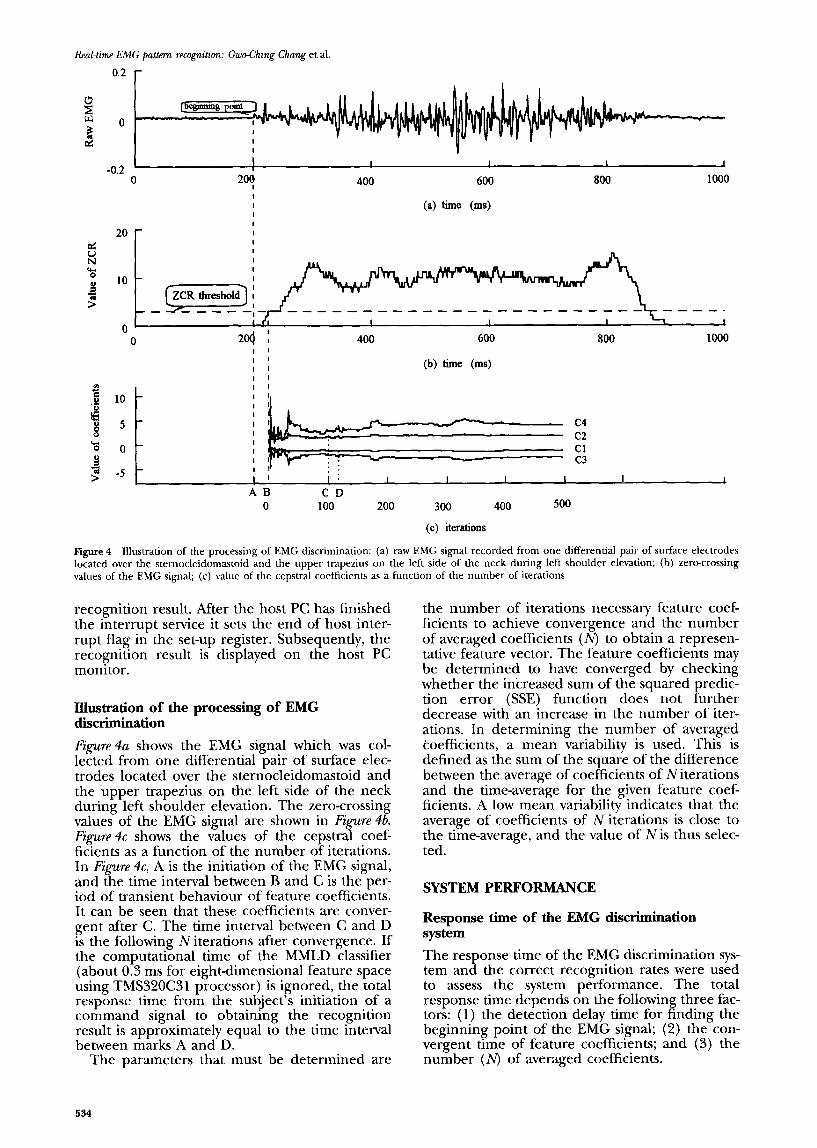
A DSP program was developed to handle data acquisition and on-line computation: the flow diagram is shown in Figure3. This DSP program consists of the main routine and a timer-driven interrupt service routine. The main routine initializes the hardware and software environment and sets the TMS320C31’s first on-chip timer to generate sampling clock interrupts with a 1 ms sampling period. During the free time (1 ms) available between data samples, the calculation routine of ZCR and the estimation routine of cep- stral coefficients are executed in the interrupt ser- vice routine. With the TMS320C31 running at a 50 ns clock cycle, the time to execute the calcu- lation of ZCR and the estimation of cepstral coef- ficients (two fourth-order models) are found to be approximately 4.4 ps and 783.5 ps, respect- ively.
In the interrupt service routine, the ZCR per 50 ms frame is first calculated, the j+ 1 frame shifts 1 ms from the starting point of the jth frame. When the muscle contracts, the ZCR is above the assigned ZCR threshold (Figure 46). Subsequently, the cepstral coefficients are com- puted. Through some updating iterations, the cepstral coefficients converge to the vicinity of true value with small fluctuation due to the addi- tive measurement noise (Figure 4~). To obtain a representative feature vector, the feature vector is expressed as an average value of the successive coefficients of N iterations after convergence. These features are then discriminated using the MMLD classifier. Finally, the recognition result and cepstral feature array are stored in the dual- port memory of the board.
Host program
A host program was developed for the host PC. It communicates with the DSP board by calling sev- eral C language routines which perform read and write operations in the dual-port memory. When the control command state represented by EMG signal is obtained, the TMS320C31 DSP informs the host PC to access the discrimination result by writing an interrupt request on the host interrupt line. During this time, the host PC accesses the
F2AL, Enable interrupt request
--- L--L.
1 Sta” iytyrupt yfice routine 1
_A.-_- ..- Start ADCs
, -.--.. ..~ I Get EMG signals from ADCs ~
~~ -.L I Calculate ZCR
l-7--- -
----__Lm.-m ._
Estimate cepstral feature C$k). Cn@), for i=l,..., 4
--. ,.- 3 Yes
Disable interrupt request ------
-* j Compute MMT] ---
+ Select minimum MMLD
L._._- .f-~- -~
on the dual-port memory L. -!
c I
Figure 3 Flow tliagr-am of the DSP program
533
Real-time !CMG pattern recognition: Gwdhing Chang et al.
-0.2 ' I I I I 1
0 20: 400 600 800 1000
I I (a) time (ms) I I
20 - I
5 I I
N
% s ? >
0 0
2? e .g 10 -
i 5 0 -
B 7 -5 - >
400 600 800 1000
(b) time (ms)
I : I I I I I 1 CD
100 200 300 400 500
(c) iterations
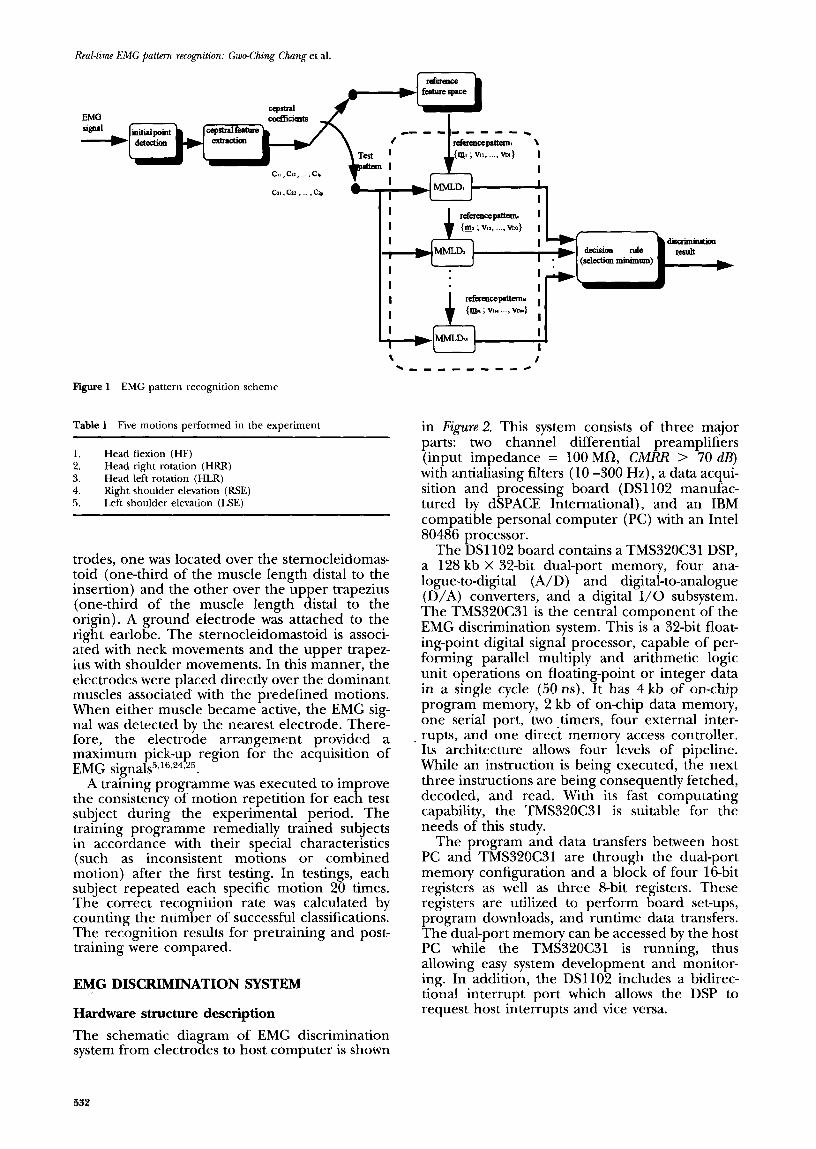
Figure 4 Illustration of the processing of EMG discrimination: (a) raw EMG signal recorded from one differential pair of surface electrodes located over the sternocleidomastoid and the upper trapezius on the left side of the neck during left shoulder elevation; (b) zero-crossing values of the EMG signal; (c) value of the cepstral coefficients as a function of the number of iterations
recognition result. After the host PC has finished the interrupt service it sets the end of host inter- rupt flag in the set-up register. Subsequently, the recognition result is displayed on the host PC monitor.
Illustration of the processing of EMG discrimination
Figure 4a shows the EMG signal which was col- lected from one differential pair of surface elec- trodes located over the sternocleidomastoid and the upper trapezius on the left side of the neck during left shoulder elevation. The zero-crossing values of the EMG signal are shown in Figure 4b. Fig-we 4c shows the values of the cepstral coef- ficients as a function of the number of iterations. In Figure 4, A is the initiation of the EMG signal, and the time interval between B and C is the per- iod of transient behaviour of feature coefficients. It can be seen that these coefficients are conver- gent after C. The time interval between C and D is the following Niterations after convergence. If the computational time of the MMLD classifier (about 0.3 ms for eight-dimensional feature space using TMS320C31 processor) is ignored, the total response time from the subject’s initiation of a command signal to obtaining the recognition result is approximately equal to the time interval between marks A and D.
The parameters that must be determined are
the number of iterations necessary feature coef- ficients to achieve convergence and the number of averaged coefficients (N) to obtain a represen- tative feature vector. The feature coefficients may be determined to have converged by checking whether the increased sum of the squared predic- tion error (SSE) function does not further decrease with an increase in the number of iter- ations. In determining the number of averaged coefficients, a mean variability is used. This is defined as the sum of the square of the difference between the average of coefficients of Niterations and the time-average for the given feature coef- ficients. A low mean variability indicates that the average of coefficients of N iterations is close to the time-average, and the value of N is thus selec- ted.
SYSTEM PERFORMANCE
Response time of the EMG discrimination system
The response time of the EMG discrimination sys- tem and the correct recognition rates were used to assess the system performance. The total response time depends on the following three fac- tors: (1) the detection delay time for finding the beginning point of the EMG signal; (2) the con- vergent time of feature coefficients; and (3) the number (N) of averaged coefficients.
534
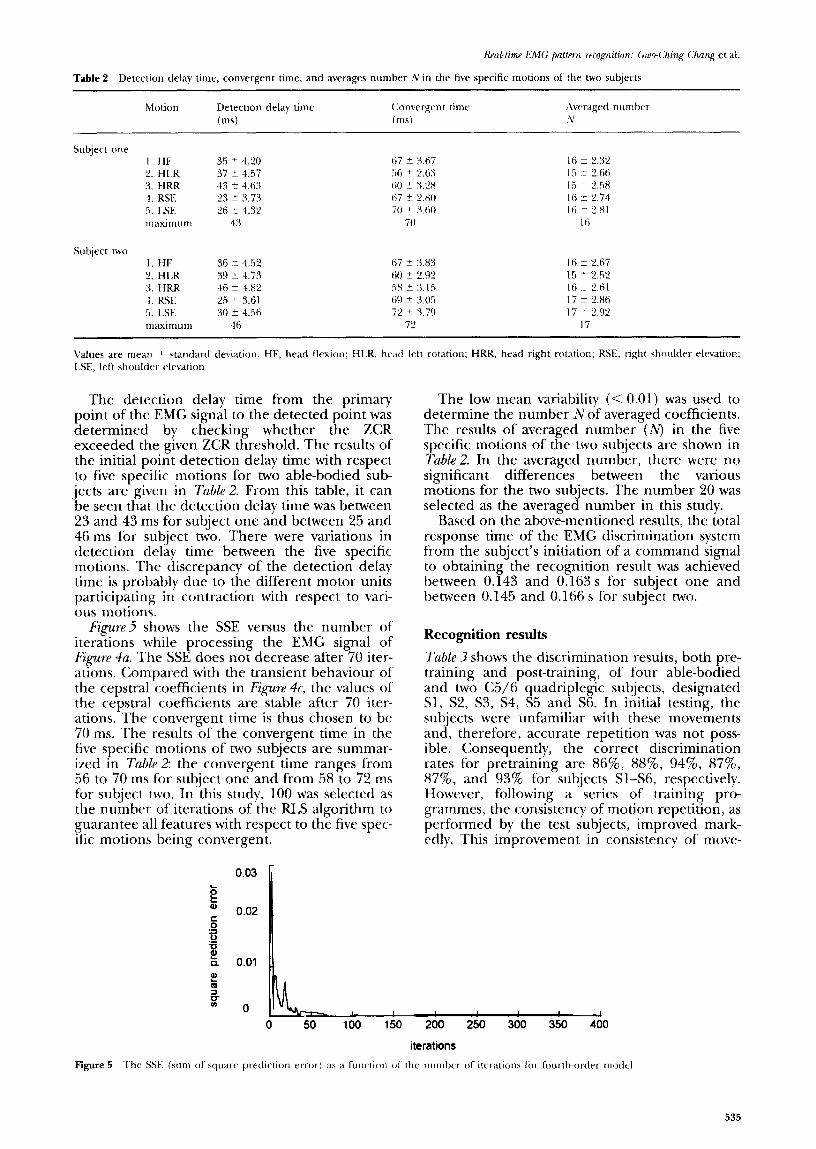
Table 2 Detection delay time, convergent time, and averages number N in the five specific motions of the two subjects
Motion Detection delay time C:onvergrnt time (ms) (ms)
Subject one I. HF 2. HLR 3. HRR 4. RX .!I. LSE maximum
Sul3ject two I. HF 2. H1.R 3. HRR 1. RSE 5. LSE maximum
36 i- 4.52 39 + 4.73 46 + 4.82 2.5 + 3.61 30 +- 4.56
46
Values are mean t standard deviation. HF. head flexion; H1.R. head lctt rotation; HRR, head right rotation: RX, right shoulder elevation; LSE, left shoulder- elevation
The detection delay time from the primary point of the EMG signal to the detected point was determined by checking whether the ZCR exceeded the given ZCR threshold. The results of the initial point detection delay time with respect to five specific motions for two able-bodied sub- jects are given in Table 2. From this table, it can be seen that the detection delay time was between 23 and 43 ms for subject one and between 25 and 46 ms for subject two. There were variations in detection delay time between the five specific motions. The discrepancy of the detection delay time is probably due to the different motor units participating in contraction with respect to vari- ous motions.
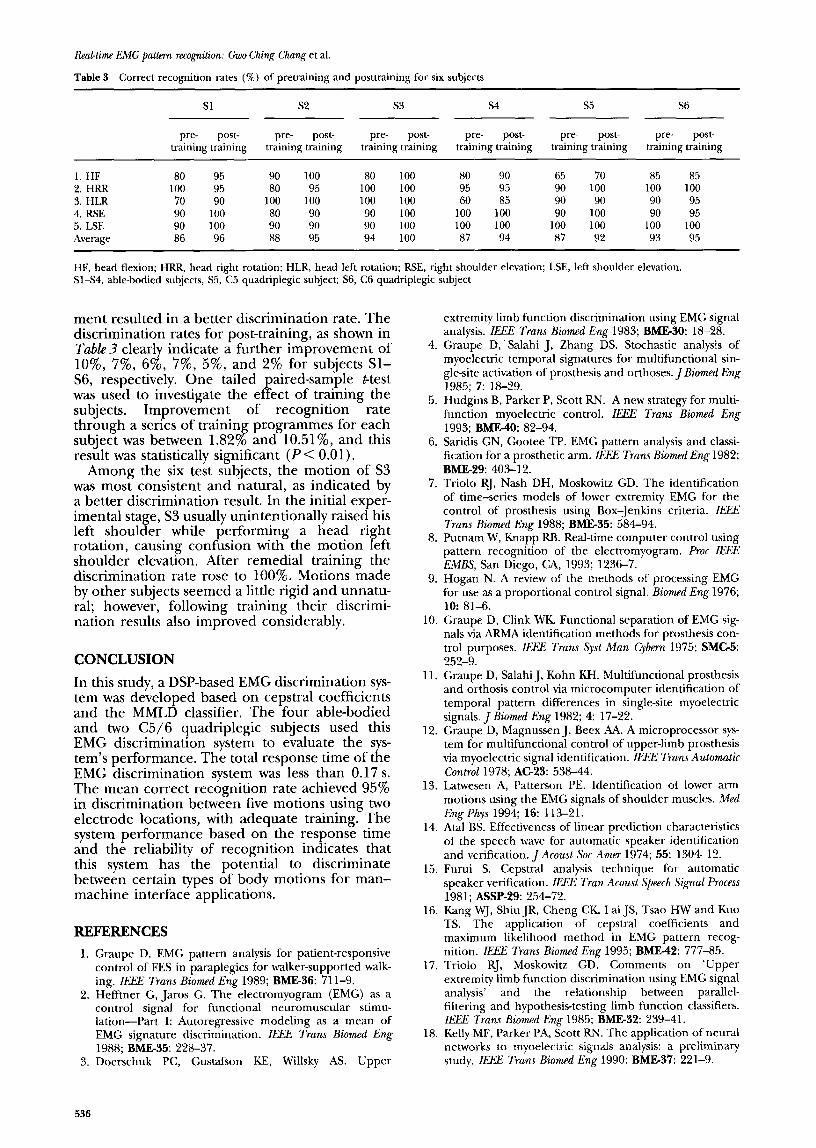
J;~SLLTP~ shows the SSE versus the number of iterations while processing the EMG signal of I;igure 4~. The SSE does not decrease after 70 iter- ations. Compared with the transient behaviour of the cepstral coefficients in Figure 4c, the values of the cepstral coefficients are stable after 70 iter- ations. The convergent time is thus chosen to be 70 ms. The results of the convergent time in the five specific motions of two subjects are summar- ized in Tubk2: the convergent time ranges from 56 to 70 ms for subject one and from 58 to 72 ms for subject two. In this study, 100 was selected as the number of iterations of the RLS algorithm to guarantee all features with respect to the five spec- ific motions being convergent.
The low mean variability (< 0.01) was used to determine the number Nof averaged coefficients. The results of averaged number (N) in the five specific motions of the two subjects are shown in Table 2. In the averaged number, there were no significant differences between the various motions for the two subjects. The number 20 was selected as the averaged number in this study.
Based on the above-mentioned results, the total response time of the EMG discrimination system from the subject’s initiation of a command signal to obtaining the recognition result was achieved between 0.143 and 0.163 s for subject one and between 0.145 and 0.166 s for subject two.
Recognition results
Tuble 3 shows the discrimination results, both pre- t.raining and post-training, of four able-bodied and two C5/6 quadriplegic subjects, designated Sl, S2, S3, S4, S5 and S6. In initial testing, the subjects were unfamiliar with these movements and, therefore, accurate repetition was not poss- ible. Consequently, the correct discrimination rates for pretraining are 86%, 88%, 94%, 87%, 87%, and 93% for subjects Sl-S6, respectively. However, following a series of training pro- grammes, the consistency of motion repetition, as performed by the test subjects, improved mark- cdly. This improvement in consistency of move-
iq~, , , , , , ,
0 50 100 150 200 250 300 350 400
iterations
Figure 5 The SW (sum of square prediction error) as a function ot the number- of iterations for fc)urrh-order modrl
535
Real-time EMG pa&m recognition: GwoChing Chang et al.
Table 3 Correct recognition rates (%) of pretraining and posttraining for six subjects
Sl s2 53 s4 s5 St?
pre- post- pre- post- pre- post- PI-.? post- pre- post- pre- post- training training training training training training training training training training training training
1. HF 80 95 90 100 80 100 80 90 65 70 85 85 2. HRR 100 95 80 95 100 100 95 95 90 100 100 100 3. HLR 70 90 100 100 100 100 60 85 90 90 90 95 4. RSE 90 100 80 90 90 100 100 100 90 100 90 95 5. LSE 90 100 90 90 90 100 100 100 100 100 100 100 Average 86 96 88 95 94 100 87 94 87 92 93 95
HF, head flexion; HRR, head right rotation; HLR, head left rotation; RSE, right shoulder elevation; LSE, left shoulder elevation. Sl-S4, able-bodied subjects, S5, C5 quadriplegic subject; S6, C6 quadriplegic subject
ment resulted in a better discrimination rate. The discrimination rates for post-training, as shown in TabZe3 clearly indicate a further improvement of lo%, 7%, 6%, 7%, 5%, and 2% for subjects Sl- S6, respectively. One tailed paired-sample t-test was used to investigate the effect of training the subjects. Improvement of recognition rate through a series of trainin pcogrammes for each subject was between 1.82 o and 10.51%, and this + result was statistically significant (PC 0.01).
Among the six test subjects, the motion of S3 was most consistent and natural, as indicated by a better discrimination result. In the initial exper- imental stage, S3 usually unintentionally raised his left shoulder while performing a head right rotation, causing confusion with the motion left shoulder elevation. After remedial training the discrimination rate rose to 100%. Motions made by other subjects seemed a little rigid and unnatu- ral; however, following training their discrimi- nation results also improved considerably.
CONCLUSION
In this study, a DSP-based EMG discrimination sys- tem was developed based on cepstral coefficients and the MMLD classifier. The four able-bodied and two C5/6 quadriplegic subjects used this EMG discrimination system to evaluate the sys- tem’s performance. The total response time of the EMG discrimination system was less than 0.17 s. The mean correct recognition rate achieved 95% in discrimination between five motions using two electrode locations, with adequate training. The system performance based on the response time and the reliability of recognition indicates that this system has the potential to discriminate between certain types of body motions for man- machine interface applications.
REFERENCES
Graupe D. EMG pattern analysis for patient-responsive control of FES in paraplegics for walker-supported walk- ing. Z&X Truns Biomed Eng 1989; BME36: 71 l-9. Hefftner G, Jaros G. The electromyogram (EMG) as a control signal for functional neuromuscular stimu- lation-part I: Autoregressive modeling as a mean of EMG signature discrimination. IEEE Trans Biormzd Eng 1988; BME-35: 228-37. Doerschuk PC, Gustafson KE, Willsky AS. Upper
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
extremity limb function discrimination using EMG signal analysis. IEEE Trans Biomed Eng 1983; BMEJO: 18-28. Graupe D, Salahi J, Zhang DS. Stochastic analysis of myoelectric temporal signatures for multifunctional sin- gle-site activation of prosthesis and orthoses. J Biomed Eng 1985; 7: 18-29. Hudgins B, Parker P, Scott RN. A new strategy for multi- function myoelectric control. ZElEE Truns Biomed Eng
1993; BMB40: 82-94. Saridis GN, Gootee TP. EMG pattern analysis and classi- fication for a prosthetic arm. IEEE Trans Biomed Eng 1982; BME29: 403-12. Triolo RJ, Nash DH, Moskowitz GD. The identification of time-series models of lower extremity EMG for the control of prosthesis using Box-Jenkins criteria. I,%% Trans Biomed Eng 1988; BMB35: 58494. Putnam W, Knapp RB. Real-time computer control using pattern recognition of the electromyogram. Proc #Xi? EMBS, San Diego, CA, 1993; 1236-7. Hogan N. A review of the methods of processing EMG for use as a proportional control signal. Biorned Eng 1976; 10: 81-6. Graupe D, Clink WK. Functional separation of EMG sig- nals via ARMA identification methods for prosthesis con- trol purposes. IEEE Trans Syst Man Cybern 1975; SMC5: 252-9. Graupe D, Salahi J, Kohn KH. Multifunctional prosthesis and orthosis control via microcomputer identification of temporal pattern differences in single-site myoelectric signals. J Biomed Eng 1982; 4: 17-22. Graupe D, Magnussen J, Beex AA. A microprocessor sys- tem for multifunctional control of upper-limb prosthesis via myoelectric signal identification. IEEE Truns Automatic Control 1978; AG23: 538-44. Latwesen A, Patterson PE. Identification of lower arm motions using the EMG signals of shoulder muscles. Med
Eng Phys 1994; 16: 113-21. Atal BS. Effectiveness of linear prediction characteristics of the speech wave for automatic speaker identification and verification. J Acoust Sot Amer 1974; 55: 130412. Furui S. Cepstral analysis technique for automatic speaker verification. IEEE Tran Acoust Speech Signal Process
1981; X&P-29: 254-72. Kang WJ, Shiu JR, Cheng CK, Lai JS, Tsao HW and Kuo TS. The application of cepstral coefficients and maximum likelihood method in EMG pattern recog- nition. IF= Trans Biomed Eng 1995; BME-42: 777-85. Triolo RJ, Moskowitz GD. Comments on ‘Upper extremity limb function discrimination using EMG signal analysis’ and the relationship between parallel- filtering and hypothesis-testing limb function classifiers. IEEE Trans Biomed Eng 1985; BME32: 239-41. Kelly MF, Parker PA, Scott RN. The application of neural networks to myoelectric signals analysis: a preliminary study. IEEE Trans Biomed Eng 1990; BME37: 221-9.
19. Kang WJ, Cheng CK, Lai JS, Shiu JR and Kuo TS. Selec- tion of the feature and classifier in EMG pattern recog- nition with different electrode arrangementi. Med Eng Phys, 1996; lS(5): 390-395.
20. Marhoul J. Linear prediction: a tutorial review. Proc Jl.XIC 1975; 63: 561-80.
2 1. Kay SM. Modern Spectral Estimation: Theory and Application. Prentice-Hall, Englewood Cliffs, NJ, 1988.
22. Haykin S. Adaptive IGllpr Theov. Prentice-Hall, Englewood Cliffs, iVJ. 1991.
23. Bow ST. Pat&n Recognition and Image J-‘reprocrssing. Marcel Dekker. New York, 1992.
24. Hefftner G, Jaros C. The electromyogram (EMG) as a control signal for functional neuromuscular stimu- lation--Part II: Practical demonstration of’ the EM<: sig- nature discrimination system. IL% 7’rall\ Hiomrd i:‘ng 1988; BME-35: 238-42.
2.5. Kang WJ, Cheng CK, Lai JS, Tsao HW and Kuo TS. The effect of electrode configuration on spectral distance measures I’rnc IbXL CL%% Baltimore. MD, 1994: 353-4.
537