Embed Size (px)
DESCRIPTION
Real-Time Embedded Systems. Assist. dr. Barbara Koroušić Seljak [email protected] (01) 4773-363. Course synopsis. Fall semester : Basics of real-time and embedded systems Embedded systems’ modeling Software and program design concepts Operating systems for real-time applications. - PowerPoint PPT Presentation
Citation preview

Real-Time Real-Time Embedded SystemsEmbedded Systems
Assist. dr. Barbara Koroušić Assist. dr. Barbara Koroušić SeljakSeljak
[email protected]@ijs.si
(01) 4773-363(01) 4773-363

Jožef Stefan International Postgraduate School 2
Course synopsisCourse synopsis
►Fall semesterFall semester:: Basics of real-time and embedded Basics of real-time and embedded
systemssystems Embedded systems’ modelingEmbedded systems’ modeling Software and program design conceptsSoftware and program design concepts Operating systems for real-time Operating systems for real-time
applicationsapplications

Jožef Stefan International Postgraduate School 3
Course synopsisCourse synopsis
►Spring semesterSpring semester:: Designing and developing embedded Designing and developing embedded
systemssystems Implementation and performance issues Implementation and performance issues

Jožef Stefan International Postgraduate School 4
Benefits? Learn about ...Benefits? Learn about ...
► ... ... challenges and approaches in challenges and approaches in real-time real-time embeddedembedded system design system design
► …… performance estimation of performance estimation of real-time real-time embeddedembedded systems systems
► ... current research area... current research areass

Jožef Stefan International Postgraduate School 5
Basics of real-time and Basics of real-time and embedded systemsembedded systems
1.1. Real-time systemsReal-time systems

Jožef Stefan International Postgraduate School 6
Real-time (RT) systemsReal-time (RT) systems
►Categories of computer systemsCategories of computer systems:: BatchBatch: has no operational deadline from : has no operational deadline from
event to system response; event to system response; Interactive on-lineInteractive on-line: quick response is : quick response is
longed-for, but not required;longed-for, but not required; Real-timeReal-time: system response is required : system response is required
within a predefined timescale, otherwise within a predefined timescale, otherwise the system won’t work properly.the system won’t work properly.

Jožef Stefan International Postgraduate School 7
Characteristics of a batch Characteristics of a batch systemsystem
► The user pre-The user pre-processes all processes all programs and programs and information at a information at a local local sitesite, and at some , and at some convenient time these convenient time these jobs are passed to a jobs are passed to a remote computerremote computer. . When all jobs are When all jobs are finished, the results finished, the results are transmitted back are transmitted back to the originating site.to the originating site.

Jožef Stefan International Postgraduate School 8
Characteristics of an on-line Characteristics of an on-line systemsystem
► Normally, access to Normally, access to such a system is such a system is made using made using computer-based computer-based remote remote terminalsterminals, , and all transactions and all transactions are handled by the are handled by the central computercentral computer in in a time-sliced a time-sliced fashion.fashion.
► These systems are These systems are widely used in widely used in banking, holiday banking, holiday booking and mail-booking and mail-order systems.order systems.
► Their response time Their response time depends on the depends on the amount of activity.amount of activity.

Jožef Stefan International Postgraduate School 9
Characteristics of a RT Characteristics of a RT systemsystem
► A A control computercontrol computer detects events detects events triggered by triggered by sensorssensors, and , and responds over responds over actuatorsactuators within within predefined time predefined time bounds.bounds.

Jožef Stefan International Postgraduate School 10
History of real-time History of real-time computingcomputing
►The term real-time derives from its use The term real-time derives from its use in early in early simulationsimulation..
►OOriginallyriginally, this term, this term referred to a referred to a simulation that proceeded at a rate simulation that proceeded at a rate that matched that of the real process that matched that of the real process it was simulating. it was simulating.

Jožef Stefan International Postgraduate School 11
RT ApplicationsRT Applications
Execution Execution timetime
DeadlinesDeadlines SW sizeSW size SW SW complexitycomplexity
Hard real-Hard real-time & fasttime & fast
● ● ● ●● ● ● ● ● ● ● ●● ● ● ● ●● ●●
Hard real-Hard real-time & slowtime & slow
●● ● ● ● ●● ● ● ● ●● ● ● ●● ● ● ●● ● ● ● ● ● ● ●●
Soft real-Soft real-time & fasttime & fast
● ● ● ●● ● ● ● ● ●● ● ●● ● ● ●● ● ● ●● ● ● ●● ● ●
Soft real-Soft real-time & slowtime & slow
● ●● ● ● ●● ● ●● ● ● ● ● ● ● ●●
●● ● ● ● ● ● ● ●●
● Low weighting; ● ● ● ● High weighting

Jožef Stefan International Postgraduate School 12
Hard RT ApplicationsHard RT Applications
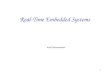
►Critical deadlinesCritical deadlines►Usually, low SW complexityUsually, low SW complexity►ExampleExample: airbag deployment system in : airbag deployment system in
motor vehiclesmotor vehicles
fast system – late deploymentdefeats the whole purpose ofairbag protection
time
value
hard deadline

Jožef Stefan International Postgraduate School 13
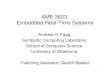
Soft RT ApplicationsSoft RT Applications
►Deadlines are not criticalDeadlines are not critical►Usually, more complex and large SW; Usually, more complex and large SW;
man-machine interfaceman-machine interface►ExamplesExamples: factory : factory
automation system, automation system,
barcode recognition barcode recognition
systemsystemfast/slow system – if fast/slow operator response is required
time
value
soft deadline

Jožef Stefan International Postgraduate School 14
Basics of real-time and Basics of real-time and embedded systemsembedded systems
1.1. Real-time systemsReal-time systems
2.2. Embedded systemsEmbedded systems

Jožef Stefan International Postgraduate School 15
Categories of RT systemsCategories of RT systems
►Categories of Categories of computing systemscomputing systems:: General-purpose computing systems;General-purpose computing systems; Embedded systems (ESs).Embedded systems (ESs).
►RT systems may be general-purpose or RT systems may be general-purpose or embedded systems.embedded systems.
►We are going to discuss We are going to discuss RT embedded RT embedded systemssystems. .

Jožef Stefan International Postgraduate School 16
Characteristics of general-Characteristics of general-purpose systemspurpose systems
►Broad class of applicationsBroad class of applications;;►Programmable by Programmable by the the end userend user;;►Faster is betterFaster is better..►CriteriaCriteria::
CostCost,, performance (performance (average speedaverage speed););
►ExamplesExamples: : personal computers, personal computers, laptops, mainframes, servers.laptops, mainframes, servers.

Jožef Stefan International Postgraduate School 17
What is an ES?What is an ES?
►An embedded system is an An embedded system is an electronic electronic componentcomponent within a physical system. within a physical system.
sensors / actuators
man-machineinterface
embedded system (a combination oftailored HW & SW)
external process
reactive & time-constrained reactive & time-constrained environmentenvironment

Jožef Stefan International Postgraduate School 18
Characteristics of ESsCharacteristics of ESs
►Single-functionedSingle-functioned:: A single system-tailored task or a very small A single system-tailored task or a very small
number of related tasks are executed repeatedly;number of related tasks are executed repeatedly; Minimal end-user intervention;Minimal end-user intervention;
►Tightly constrainedTightly constrained:: Low cost, low power, small size, easy-to-use, etc;Low cost, low power, small size, easy-to-use, etc;
►Reactive & real-timeReactive & real-time:: Continually reacts to events in the system’s Continually reacts to events in the system’s
physical environmentphysical environment;; Must perform certain tasks in real-time on a Must perform certain tasks in real-time on a
physical platformphysical platform..

Jožef Stefan International Postgraduate School 19
Examples of ESs in common Examples of ESs in common environments (1)environments (1)

Jožef Stefan International Postgraduate School 20
Examples of ESs in common Examples of ESs in common environments (2)environments (2)

Jožef Stefan International Postgraduate School 21
Short list of embedded Short list of embedded applicationsapplications
► Consumer electronicsConsumer electronics (MP3 players, smart clothes, (MP3 players, smart clothes, wearable devices)wearable devices)
► Home appliancesHome appliances (microwave owens, home security (microwave owens, home security system)system)
► Office automationOffice automation (modems, printers, scanners) (modems, printers, scanners)► Business equipmentBusiness equipment (intruder alarm systems, POS (intruder alarm systems, POS
terminals)terminals)► AutomobilesAutomobiles (fuel injection, anti-lock brakes) (fuel injection, anti-lock brakes)► Aircrafts, Aircrafts, satellitesatellites, trains, submariness, trains, submarines (navigation (navigation
systems)systems)► MedicineMedicine (life-support systems, medical devices) (life-support systems, medical devices)► TelecommunicationTelecommunication (network switches/routers, cell (network switches/routers, cell
phones)phones)► AAutomationutomation systems systems (monitors, robots) (monitors, robots)

Jožef Stefan International Postgraduate School 22
Microprocessor and Microprocessor and semiconductor chips’ trendssemiconductor chips’ trends

Jožef Stefan International Postgraduate School 23
Brief history of ESs (1)Brief history of ESs (1)► Late Late 1940’s1940’s: MIT Whirlwind : MIT Whirlwind
computer was designed for computer was designed for real-time operationsreal-time operations:: Originally designed to control Originally designed to control
an aircraft simulatoran aircraft simulator;;► In the In the 1960’s1960’s::
The first recognizably The first recognizably ESES was was the Apollo Guidance the Apollo Guidance ComputerComputer ( (MIT MIT Instrumentation LaboratoryInstrumentation Laboratory););
► By the end of the By the end of the 8080’s’s: : ESsESs were the norm rather were the norm rather
than the exception for almost than the exception for almost all electronics devicesall electronics devices (microcontrollers, I(microcontrollers, I22C).C).
Whirlwind computerWhirlwind computer
Apollo Guidance Apollo Guidance computercomputer
Intel 4004Intel 4004

Jožef Stefan International Postgraduate School 24
Brief history of ESs (2)Brief history of ESs (2)
Today’s complex ESs are based on Today’s complex ESs are based on networks networks of distributed microprocessorsof distributed microprocessors that run that run many off-the-shelf operating systemsmany off-the-shelf operating systems and and communicate through wired and wireless communicate through wired and wireless buses, LANs and WANs;buses, LANs and WANs;► AA high-end automobile may have high-end automobile may have 100 microprocessors:100 microprocessors: 4-bit microcontroller4-bit microcontrollerss check seat check seat
beltbeltss;; microcontrollers run dashboard microcontrollers run dashboard
devices;devices; 16/32-bit microprocessor 16/32-bit microprocessor
controls engine.controls engine.

Jožef Stefan International Postgraduate School 25
Brief history of ESs (3)Brief history of ESs (3)
► What do we expect from high-performance What do we expect from high-performance ESs today?ESs today? Giga-ops of computing power;Giga-ops of computing power; For example, cell phones that use SW-radio For example, cell phones that use SW-radio
techniques will need to deliver at least techniques will need to deliver at least 10 billion 10 billion operations per secondoperations per second;;
Multimedia applications.Multimedia applications.
► It is It is difficultdifficult to achieve this performance to achieve this performance level in the face of level in the face of real-timereal-time and and low powerlow power or other constraints.or other constraints.

Jožef Stefan International Postgraduate School 26
Few statistical factsFew statistical facts
►General-purpose computersGeneral-purpose computers:: MillionsMillions of units produced per year. of units produced per year.
►Embedded systemsEmbedded systems:: BillionsBillions of units produced yearly of units produced yearly
(VDC Report, 2006).(VDC Report, 2006). More than 98% of processors applied More than 98% of processors applied
today are in ESs.today are in ESs. Mean age of embedded developers: Mean age of embedded developers:
39,6. 39,6.

Jožef Stefan International Postgraduate School 27
StudentsStudents
StudentStudent Research areaResearch area1.1. Student 1Student 1
2.2. Student 2Student 2
3.3. Student 3Student 3
4.4. Student 4Student 4
5.5. Student 5Student 5
6.6. Student 6Student 6
7.7. Student 7Student 7

Jožef Stefan International Postgraduate School 28
ESs’ modelingESs’ modeling
► ChallengesChallenges::1.1. TechnologicalTechnological: build an embedded : build an embedded
system of predictable functionality and system of predictable functionality and quality (performance & robustness) quality (performance & robustness) considering the system’s constraints;considering the system’s constraints;

Jožef Stefan International Postgraduate School 29
How to satisfy the How to satisfy the technologicaltechnological challenge?challenge?
Computing
methodsalgorithmsreuse
Execution constraints
CPU speedmemorypowerHW failure rates
System’s reaction constraints
performance (deadlines, jitter, throughput)robustness (security, safety, availability)

Jožef Stefan International Postgraduate School 30
Hardware design?Hardware design?
Computing
methodsalgorithmsreuse
Execution constraints
CPU speedmemorypowerHW failure rates
System’s reactionconstraints
performance (deadlines, jitter, throughput)robustness (security, safety, availability)
new computer new computer architectures (open & flexible multi-core SoC)architectures (open & flexible multi-core SoC)

Jožef Stefan International Postgraduate School 31
Software design?Software design?
Computing
methodsalgorithmsreuse
Execution constraints
CPU speedmemorypowerHW failure rates
System’s reactionconstraints
performance (deadlines, jitter, throughput)robustness (security, safety, availability)
new software new software architectures architectures (1-2 million lines of code)(1-2 million lines of code)

Jožef Stefan International Postgraduate School 32
Control design?Control design?
Computing
methodsalgorithmsreuse
Execution constraints
CPU speedmemorypowerHW failure rates
System’s reaction constraints
performance (deadlines, jitter, throughput)robustness (security, safety, availability)
novel system-level analysis, novel system-level analysis, modeling methods and toolsmodeling methods and tools

Jožef Stefan International Postgraduate School 33
HW/SW Codesign!HW/SW Codesign!
Computing
methodsalgorithmsreuse
Execution constraints
CPU speedmemorypowerHW failure rates
System’s reactionconstraints
performance (deadlines, jitter, throughput)robustness (security, safety, availability)
Design, validation & maintenance processesDesign, validation & maintenance processesneed to support the high-performance need to support the high-performance HW & communication technologies!HW & communication technologies!

Jožef Stefan International Postgraduate School 34
HW/SW Co-design ApproachHW/SW Co-design Approach
► In the past, HW and SW In the past, HW and SW design technologies design technologies were very different.were very different.
► Today, Today, synthesis synthesis approachesapproaches enable a enable a unified view of HW and unified view of HW and SW: SW: Design of HW and SW Design of HW and SW
can start from can start from behavioral (system-behavioral (system-level) description in level) description in sequential program sequential program model;model;
Electronic System Electronic System Level DesignLevel Design..
Co-specificationProblem analysis
Requirement specifications
HW/SW partitioning
Co-synthesis
SW HWInterface
System IntegrationCo-simulationCo-verification
C code
VHDL code
SystemC code

Jožef Stefan International Postgraduate School 35
The Co-design Ladder The Co-design Ladder (Vahid&Givargis, 2002)(Vahid&Givargis, 2002)
CompilersCompilers(1960s,1970s)(1960s,1970s)
Assemblers, linkersAssemblers, linkers(1950s, 1960s)(1950s, 1960s)
Behavioral synthesisBehavioral synthesis (1990s(1990s, 2000s, 2000s))
RT synthesisRT synthesis(1980s, 1990s)(1980s, 1990s)
Logic synthesisLogic synthesis(1970s, 1980s)(1970s, 1980s)
Assembly instructionsAssembly instructions
Machine instructionsMachine instructions Logic gatesLogic gates
LogicLogic equations/FSMs equations/FSMs
Register transfersRegister transfers
Sequential programSequential program codes codes (e.g., C, VHDL (e.g., C, VHDL, SystemC, SystemC))
Traditional program on a programmable Traditional program on a programmable processorprocessor
VLSI, ASIC, or PLD VLSI, ASIC, or PLD implementationimplementation
SWSW
HWHW

Jožef Stefan International Postgraduate School 36
Embedded Systems Design Embedded Systems Design ChallengeChallenge
►Design goal:Design goal: Construct a system with desired Construct a system with desired
functionality.functionality.
►Key design challenge:Key design challenge: Simultaneously optimize numerous Simultaneously optimize numerous design design
metricsmetrics::►Time-to-prototypeTime-to-prototype►Time-to-marketTime-to-market►MaintainabilityMaintainability►Correctness, reliability, safety, etc.Correctness, reliability, safety, etc.
8 months

Jožef Stefan International Postgraduate School 37
ESs’ modelingESs’ modeling
► ChallengesChallenges::1.1. TechnologicalTechnological: build an embedded : build an embedded
system of predictable functionality and system of predictable functionality and quality (performance & robustness) quality (performance & robustness) considering the system’s constraints;considering the system’s constraints;
2.2. ScientificScientific: integrate Electrical : integrate Electrical Engineering and Computer Science Engineering and Computer Science methodologies. methodologies.

Jožef Stefan International Postgraduate School 38
How to satisfy the How to satisfy the scientific scientific challenge? challenge?
Electrical engineeringElectrical engineering► Differential equationsDifferential equations► Linear algebraLinear algebra► Probability theoryProbability theory
► SythesisSythesis
► Theories of estimationTheories of estimation► Theories of robustnessTheories of robustness
Computer scienceComputer science► LogicLogic► Discrete structuresDiscrete structures► Automata theoryAutomata theory
► Theories of Theories of correctnesscorrectness
► VerificationVerificationLet’s take down the cultural wall between Let’s take down the cultural wall between the two fields!the two fields!

Jožef Stefan International Postgraduate School 39
Modeling (1)Modeling (1)
Main steps of the ES’s designMain steps of the ES’s design::1.1. Definition of system’s constraints / Definition of system’s constraints /
requirements;requirements;
2.2. Derivation of an abstract system, i.e. Derivation of an abstract system, i.e. a model;a model;
3.3. Automatic generation of a system. Automatic generation of a system.

Jožef Stefan International Postgraduate School 40
Modeling (2)Modeling (2)
► However, we cannot separate computation However, we cannot separate computation (SW) from physicality (SW) from physicality ((platform & platform & environmentenvironment))!!
SW designSW design
a program
a code
a compilergenerates
modelmodel
HW designHW design
a HW description
a circuit
a computer-aided design tool synthesizes
modelmodel

Jožef Stefan International Postgraduate School 41
Analytical modeling (1)Analytical modeling (1)
►AnalyticAnalyticalal model model is ais a simulationsimulation,, based based on on an an abstract abstract system’s system’s representationrepresentation, which:, which: attempts to find attempts to find analytical analytical (equation-(equation-
based) based) solutions to problemssolutions to problems thatthat enable enable the prediction of the the prediction of the system’s system’s behavior behavior from a set of parameters and initial from a set of parameters and initial conditionsconditions..

Jožef Stefan International Postgraduate School 42
Analytical modeling (2)Analytical modeling (2)
►Types of aTypes of analyticnalyticalal model modelss :: algorithm-basedalgorithm-based (language-based: Ada, (language-based: Ada,
RT-Java / synthesis-based: VHDL, Verilog),RT-Java / synthesis-based: VHDL, Verilog), equation-basedequation-based (MATLAB/Simulink) (MATLAB/Simulink)
►object-oriented,object-oriented,►dynamic simulation,dynamic simulation,►implementation platform independent (implementation platform independent (model-model-
basedbased););►ANSYS.ANSYS.

Jožef Stefan International Postgraduate School 43
Analytical modeling (3)Analytical modeling (3)
► Building blocksBuilding blocks: : typestypes: transistors, logic gates, functional components (adders), : transistors, logic gates, functional components (adders),
architectural components (processors);architectural components (processors); structure changesstructure changes: deterministic, or probabilistic;: deterministic, or probabilistic; compositioncomposition: interconnected, inherently parallel, determined by data : interconnected, inherently parallel, determined by data
flows;flows; formal semanticsformal semantics: transfer functions, typically specified by equations;: transfer functions, typically specified by equations;
ExamplesExamples: netlists, dataflow diagrams, and other notations for describing system’s structure.

Jožef Stefan International Postgraduate School 44
Analytical modeling (4)Analytical modeling (4)
► Embedded Embedded MATLAB:MATLAB: automatic automatic
code code generation generation of of C and C and C+C++ objects+ objects, , optimized optimized for ESs.for ESs.

Jožef Stefan International Postgraduate School 45
Computational modeling (1)Computational modeling (1)
► ComputationalComputational model model is is a a computer programcomputer program, or , or a a network of computers, network of computers, whichwhich attempts to simulate attempts to simulate an abstract model of a particular systeman abstract model of a particular system:: ssimulationimulation is combined is combined with with the the reality of actual eventsreality of actual events;; solutions to the problem are solutions to the problem are machine-basedmachine-based..

Jožef Stefan International Postgraduate School 46
Computational modeling (2)Computational modeling (2)
►Types of computationalTypes of computational model modelss :: machine-basedmachine-based (RT/UML, AADL) (RT/UML, AADL)
►object-oriented,object-oriented,►dynamic simulation,dynamic simulation,►more generic (execution semantics more generic (execution semantics
independent) – independent) – model-basedmodel-based..

Jožef Stefan International Postgraduate School 47
Computational modeling (3)Computational modeling (3)
► Building blocks:Building blocks: typestypes: objects, threads;: objects, threads; structure changesstructure changes: dynamically;: dynamically; compositioncomposition: sequential, determined by control flows;: sequential, determined by control flows; formal semanticsformal semantics: abstract machine (virtual machine / : abstract machine (virtual machine /
automaton);automaton);
ExamplesExamples: programs, state machines, and other notations for describing system dynamics.

Jožef Stefan International Postgraduate School 48
Computational modeling (4)Computational modeling (4)
►Be realistic about the UML:Be realistic about the UML: Lack of Lack of analytical toolsanalytical tools for computational for computational
models to deal with physical constraints;models to deal with physical constraints; Generally,Generally, c codeode is still individually is still individually
designed, not automatically generated.designed, not automatically generated.

Jožef Stefan International Postgraduate School 49
Analytical vs. computational Analytical vs. computational modelingmodeling
Analytical modelingAnalytical modeling Computational Computational modelingmodeling
ConcurrencyConcurrency + / naturally deals with + / naturally deals with concurrencyconcurrency
--
Physical Physical constraintsconstraints
++ --
NondeterminismNondeterminism - / struggles with partial - / struggles with partial & incremental & incremental specifications specifications
+ / supports + / supports nondeterministic abstraction nondeterministic abstraction
hierarchies hierarchies
Computational Computational complexitycomplexity
-- + / rich theory+ / rich theory
Analytical & Analytical & synthesis synthesis techniquestechniques
++ --
Automatic Automatic generation of a generation of a systemsystem
++ + / directly executable + / directly executable modelsmodels

Jožef Stefan International Postgraduate School 50
Software and program design Software and program design conceptsconcepts
►SW PrototypingSW Prototyping

Jožef Stefan International Postgraduate School 51
What do we want in our SW?What do we want in our SW?
► Correctness: the static property that a
program is consistent with its specification;
► Reliability: the extend to which a
program can be expected to perform its intended function with required precision;
► Safety: the extend to which a
program is concerned with the consequences of failure.
dependable SW
correct
reliable
safe
is
We wish that our SW is We wish that our SW is dependable, is delivered on dependable, is delivered on time and is done within time and is done within budget!budget!

Jožef Stefan International Postgraduate School 52
How to achieve this? (1)How to achieve this? (1)
1.1. Develop a clear statement of system’s requirements.Develop a clear statement of system’s requirements.2.2. Ensure that the design solution is capable of achieving Ensure that the design solution is capable of achieving
this.this.3.3. Organize the development so that the project is Organize the development so that the project is
manageable.manageable.4.4. Organize the development so that timescales can be met.Organize the development so that timescales can be met.5.5. Make sure that the design can be managed without major Make sure that the design can be managed without major
rewrites.rewrites.6.6. Design for testability.Design for testability.7.7. Minimize risks by using tried and trusted methods.Minimize risks by using tried and trusted methods.8.8. Ensure that safety is given its correct priority.Ensure that safety is given its correct priority.9.9. Make sure that the project doesn’t completely rely on Make sure that the project doesn’t completely rely on
particular individual.particular individual.10.10.Produce a maintainable design.Produce a maintainable design.11.11.??

Jožef Stefan International Postgraduate School 53
How to achieve this? (2)How to achieve this? (2)
System’s requirements
What it’s supposed to do
function
Do’s and don’t’s
constraints
How it fits inwith its
environment
interfaces
How well itmust do it
performance
‘real-world’ interfaces ‘SW world’ interfaces
man-machine plant OSs databases
functionalfunctional non-functionalnon-functional non-functionalnon-functional non-functionalnon-functional

Jožef Stefan International Postgraduate School 54
How to achieve this? (3)How to achieve this? (3)sy stem’s
requirementscapturing
architectural
design
architectural
ev aluation
design
architectural
ref inement
integration
metrics
collection
sof tware
libraries
hardware
libraries
sof tware hardware
sy nthesis
virtual prototypingvirtual prototyping

Jožef Stefan International Postgraduate School 55
OSs for RT ApplicationsOSs for RT Applications
►Basics of RTOSs;Basics of RTOSs;

Jožef Stefan International Postgraduate School 56
Role of OSsRole of OSs
► Typical OS configurationTypical OS configuration::
► OS is an organized collection of OS is an organized collection of SW extensions of HW that serve SW extensions of HW that serve as:as: control routines for operating control routines for operating
a computer;a computer; an environment for execution an environment for execution
of programs.of programs.
► Typical embedded Typical embedded configurationconfiguration::
HW
OSUser programs
HW
User programsincluding RTOScomponents

Jožef Stefan International Postgraduate School 57
OS hierarchyOS hierarchy
► Typical OS Typical OS configurationconfiguration::
► Typical embedded Typical embedded configurationconfiguration::
► OS kernel gives us control over OS kernel gives us control over the resources:the resources: No background processes;No background processes; Bounded number of tasks;Bounded number of tasks;
► OS kernel gives us control over OS kernel gives us control over timing by allowing:timing by allowing: Manipulation of task priorities;Manipulation of task priorities; Choice of scheduling options.Choice of scheduling options.
HW
OS Kernel
File & Disk Control
OS User Interface Shell
Applicationprogram
Applicationprogram
Applicationprogram
HW
OS Kernel
Applicationprogram interfaces
OS Executive
Real-worldinterfaces

Jožef Stefan International Postgraduate School 58
Terminology: tasks & functions Terminology: tasks & functions (1)(1)
► A A tasktask is a is a processprocess that that repeats itself:repeats itself: Loop forever;Loop forever; Essential building block Essential building block
of real-time SW systems;of real-time SW systems; A job is an instance of a A job is an instance of a
task.task.
► A A functionfunction is a is a procedureprocedure that is that is called. It runs, then called. It runs, then exits and may return a exits and may return a value.value.
while(1){ get_data(); process_data();}
looploop
functionsfunctions
a task with a real-time a task with a real-time purposepurpose

Jožef Stefan International Postgraduate School 59
Terminology: tasks & functions Terminology: tasks & functions (2)(2)
► Periodic tasksPeriodic tasks:: Time-drivenTime-driven:: ccharacteristics are known a prioriharacteristics are known a priori;; Task Task ttii is characterized by (T is characterized by (Tii, C, Cii));; For example, For example, ttask monitoring temperature of a patient.ask monitoring temperature of a patient.
► Aperiodic tasksAperiodic tasks:: Event-drivenEvent-driven:: ccharacteristics are not known a prioriharacteristics are not known a priori;; Task Task ttii is characterized by (C is characterized by (Cii, D, Dii) and some probabilistic ) and some probabilistic
profileprofile for arrival patterns (e.g. Poisson model)for arrival patterns (e.g. Poisson model);; For example, tFor example, task activated upon detecting change in ask activated upon detecting change in
patient’spatient’s condition.condition.► Sporadic TasksSporadic Tasks::
Aperiodic tasks with known minimum inter-arrival time (TAperiodic tasks with known minimum inter-arrival time (Tii, , CCii))..

Jožef Stefan International Postgraduate School 60
Terminology: tasks & functions Terminology: tasks & functions (3)(3)
► Task’s parameters:Task’s parameters: Release timeRelease time: the time when a job is ready;: the time when a job is ready; Computation timeComputation time: usually Worst-Case Execution : usually Worst-Case Execution
Time (CTime (Cii);); DeadlineDeadline: the time when a job should be ready : the time when a job should be ready
(D(Dii);); PeriodPeriod: Period or minimum interarrival time;: Period or minimum interarrival time; PriorityPriority: static or dynamic;: static or dynamic; Blocking timeBlocking time: worst-case;: worst-case; Response time (latency)Response time (latency): the time difference : the time difference
between the release time of a job and the between the release time of a job and the completition time of the job.completition time of the job.

Jožef Stefan International Postgraduate School 61
Terminology: Processes & Terminology: Processes & ThreadsThreads
► InIn traditional multitasking traditional multitasking OSs,OSs, processesprocesses are typically are typically independent, carry independent, carry considerable state considerable state information, have separate information, have separate address spaces, and interact address spaces, and interact only through system-provided only through system-provided inter-process communication inter-process communication mechanisms. mechanisms.
► Multiple Multiple threadsthreads, on the other , on the other hand, typically share the hand, typically share the state information of a single state information of a single process, and share memory process, and share memory and other resources directly. and other resources directly.
► Context switching between Context switching between threads in the same process threads in the same process is typically faster than is typically faster than context switching between context switching between processes.processes.
A threadthread ((of executionof execution)) is is a way for a way for a programa program to fork (or split)to fork (or split) itself into itself into two ortwo or more more (pseudo-)(pseudo-)simultaneously simultaneously running tasks.running tasks.

Jožef Stefan International Postgraduate School 62
Basic RTOS kernel functionsBasic RTOS kernel functions
►Task schedulerTask scheduler: to determine which : to determine which task will run next in a multitasking task will run next in a multitasking system;system;
►Task dispatcherTask dispatcher: to perform necessary : to perform necessary book-keeping to start a task;book-keeping to start a task;
►Control of shared resourcesControl of shared resources: to support : to support intertask communication.intertask communication.

Jožef Stefan International Postgraduate School 63
OSs for RT ApplicationsOSs for RT Applications
►Basics of RTOSs;Basics of RTOSs;►Scheduling modeling assumptions.Scheduling modeling assumptions.

Jožef Stefan International Postgraduate School 64
RTOS kernel design strategies RTOS kernel design strategies (1)(1)
► Simple optionsSimple options::1.1. Pooled loop systemsPooled loop systems::
A single and repetative instruction tests a flag that A single and repetative instruction tests a flag that indicates whether or not an event has occured;indicates whether or not an event has occured;
No scheduling and intertask communication needed;No scheduling and intertask communication needed; Processor is dedicated to handling the data channel.Processor is dedicated to handling the data channel.
2.2. Interrupt-driven systemsInterrupt-driven systems:: Processing continues until interrupted by external Processing continues until interrupted by external
events;events; After interrupt has been serviced, processing After interrupt has been serviced, processing
resumes where it left off.resumes where it left off.

Jožef Stefan International Postgraduate School 65
Interrupt handlingInterrupt handling
► An An interruptinterrupt is a SW or is a SW or HW HW signalsignal to the to the processor,processor, indicating that something indicating that something
urgent has happened:urgent has happened:► Current task wants to Current task wants to
sleep or get I/O;sleep or get I/O;► Scheduler wants to run a Scheduler wants to run a
different task now;different task now;► Sensors detect external Sensors detect external
events;events; Interrupts can be:Interrupts can be:
► prioritized,prioritized,► disabled,disabled,► masked.masked.
interrupts
ISRISR
ISR
Processor must check for Processor must check for interrupts very frequently.interrupts very frequently.

Jožef Stefan International Postgraduate School 66
RTOS kernel design strategies RTOS kernel design strategies (2)(2)
► Extended optionsExtended options::
1.1. MultitaskingMultitasking
2.2. Foreground / background systemsForeground / background systems
3.3. Full featured RTOSsFull featured RTOSs

Jožef Stefan International Postgraduate School 67
Multitasking (1)Multitasking (1)
► Separate tasks share one or Separate tasks share one or more more processorsprocessors..
► Each task executes within its own Each task executes within its own contextcontext::
► Owns Owns CPU;CPU;► Sees its own variablesSees its own variables;;► May be interruptedMay be interrupted;;
► Tasks may interact to execute as a Tasks may interact to execute as a whole programwhole program..

Jožef Stefan International Postgraduate School 68
Multitasking (2)Multitasking (2)
► Ways to implement multitasking:Ways to implement multitasking: Cyclic Executive Cyclic Executive (statically ordered tasks / threads)(statically ordered tasks / threads) Round Robin Round Robin (each task is assigned a fixed time slice)(each task is assigned a fixed time slice)
► These waysThese ways areare not perfectnot perfect:: High priority tasks hog resources and starve low High priority tasks hog resources and starve low
priority taskspriority tasks;; Low priority tasks share a resource with high priority Low priority tasks share a resource with high priority
tasks and block hightasks and block high priority taskpriority tasks.s.► How does a RTOS deal with some of these issues?How does a RTOS deal with some of these issues?
Rate Monotonic Rate Monotonic / Earliest Deadline / Earliest Deadline SystemsSystems Priority InheritancePriority Inheritance

Jožef Stefan International Postgraduate School 69
Rate Monotonic systems (Liu & Rate Monotonic systems (Liu & Layland, 1973)Layland, 1973)
► General characteristicsGeneral characteristics:: Priority-based pre-Priority-based pre-
emptive staticemptive static scheduling;scheduling;
Highest-priority ready Highest-priority ready tasktask runs runs first; first;
Task priority P is set Task priority P is set according to its according to its periodicity Tperiodicity Tpp: : P=1/ TP=1/ Tpp;;
Tasks are equally Tasks are equally important;important;
SCHED_FIFO (POSIX)SCHED_FIFO (POSIX)
► ConsCons:: It cannot deal with aperiodic It cannot deal with aperiodic
tasks;tasks; Task deadline and period are Task deadline and period are
considered to be considered to be synonymous;synonymous;
TaskTask worst-case worst-case execution execution time is constanttime is constant;;
Tasks are independent, i.e. Tasks are independent, i.e. non-interacting.non-interacting.
► ProsPros:: Zero contextZero context--switch timeswitch time;; Task set scheduled using Task set scheduled using
RMS is guaranteed to be RMS is guaranteed to be feasiblefeasible provided its provided its utilizationutilization does not exceed does not exceed 0.693 (0.693 (full utilizationfull utilization).).

Jožef Stefan International Postgraduate School 70
Rate Monotonic systems (2)Rate Monotonic systems (2)
►UtilizationUtilization:: The percentage of The percentage of
available available processor time processor time spent executing spent executing tasks (Utasks (Utt););
The lowest The lowest utilization figure utilization figure U for n tasks is U for n tasks is U=n(2U=n(21/n1/n-1)-1)..
tastaskk
execution execution time (ms)time (ms)
deadline / deadline / period (ms)period (ms)
11 11 88
22 22 55
33 22 1010
Ut=1/8+2/5+2/10=0.725
U= 3(21/3-1)=0.78
Since USince Utt < U ... the system is < U ... the system is schedulable!schedulable!

Jožef Stefan International Postgraduate School 71
Earliest Deadline First (EDF)Earliest Deadline First (EDF)
► General General characteristicscharacteristics:: Priority-based pre-Priority-based pre-
emptive dynamicemptive dynamic scheduling;scheduling;
Highest-priority Highest-priority ready ready tasktask runs runs first; first;
Task priority P is set Task priority P is set according to its due according to its due time Ttime Tgg: : P=1/ TP=1/ Tgg;;
Tasks are equally Tasks are equally important;important;
► ConsCons:: Tasks’ priorities need to Tasks’ priorities need to
bebe recalculated recalculated at every at every timer interrupttimer interrupt;;
Task set scheduled using Task set scheduled using EDF is guaranteed to be EDF is guaranteed to be feasiblefeasible even if its even if its utilizationutilization is 1. is 1.
► ProsPros:: Task may miss its Task may miss its
deadline.deadline.

Jožef Stefan International Postgraduate School 72
Foreground / background Foreground / background systemssystems
►Most common Most common hybrid solutionhybrid solution for for embedded applications.embedded applications.
► Involve Involve interrupt-driveninterrupt-driven (foreground) & (foreground) & non-interrupt-drivennon-interrupt-driven (background) (background) processes:processes: Anything non-time-critical should be in Anything non-time-critical should be in
background.background.

Jožef Stefan International Postgraduate School 73
OSs for RT ApplicationsOSs for RT Applications
►Basics of RTOSs;Basics of RTOSs;►Scheduling modeling assumptionsScheduling modeling assumptions;;► Interprocess communication.Interprocess communication.

Jožef Stefan International Postgraduate School 74
Priority inversionPriority inversion
► ProblemProblem:: Task TTask T11 of high of high
priority and task Tpriority and task T33 of low priority share of low priority share a resource;a resource;
Task TTask T11 is blocked is blocked when task Twhen task T33 runs runs ((priority inversionpriority inversion); );
Task TTask T1 1 will be will be blocked for longer if blocked for longer if task Ttask T22 of medium of medium priority comes along priority comes along to keep task Tto keep task T33 from from finishing;finishing;
► SolutionSolution:: A good RTOS would A good RTOS would
sense this condition sense this condition and temporarily and temporarily promote task Tpromote task T33 to to the high priority of the high priority of task Ttask T1 1 ((priority priority inheritanceinheritance).).

Jožef Stefan International Postgraduate School 75
How to overcome priority How to overcome priority inversion? inversion?
► ProblemProblem:: ► Solution Solution ((priority priority ceiling protocolceiling protocol):):
T3 T3 T3
T2
T1T1
time
priority
low
high
T1 is blocked because T3 has the resource
T2 can block T3, which
also keeps T1 waiting
T3 inherits T1’s priorityso it can finish and then T1 can have the resource
time
low
high
T3
T3
T3
T2
T1T1
priority

Jožef Stefan International Postgraduate School 76
OSs for RT ApplicationsOSs for RT Applications
►Basics of RTOSs.Basics of RTOSs.►Scheduling modeling assumptions.Scheduling modeling assumptions.► Interprocess communication.Interprocess communication.►Power management.Power management.

Jožef Stefan International Postgraduate School 77
Power optimizationPower optimization
►Power managementPower management: : determines how system resources are determines how system resources are
going to be going to be used to used to satisfy thesatisfy the power power consumptionconsumption’s requirement’s requirement..
►RTRTOS OS may may reduce power by shutting reduce power by shutting down unitsdown units:: Entering and leaving the power-down Entering and leaving the power-down
mode requires both, energy and timemode requires both, energy and time..

Jožef Stefan International Postgraduate School 78
Power Power management policies management policies (1)(1)
► Request-drivenRequest-driven: : PPower up once ower up once
request is receivedrequest is received;; ConCon: : Adds delay to Adds delay to
response.response.
► Predictive shutdownPredictive shutdown:: Due timeDue time toto next next
requestrequest is predicted; is predicted; ProPro: : May start up in May start up in
advance of request in advance of request in anticipation of a new anticipation of a new requestrequest;;
ConCon: : If predictIf prediction ision is wrong, wrong, an an additional additional delay delay may be incured may be incured while starting up.while starting up.

Jožef Stefan International Postgraduate School 79
Power Power management policies management policies (2)(2)
►Probabilistic shutdownProbabilistic shutdown: : Assume service requests are probabilisticAssume service requests are probabilistic;; Optimize expected values:Optimize expected values:
►power consumption;power consumption;►response time.response time.
Simple probabilisticSimple probabilistic: shut down after time : shut down after time TTonon, turn back on after waiting for T, turn back on after waiting for Toffoff..

Jožef Stefan International Postgraduate School 80
Advanced Configuration and Advanced Configuration and Power InterfacePower Interface
►ACPIACPI ( (open standard for power open standard for power management servicesmanagement services))..
Hardware platform
devicedrivers
ACPI BIOS
RTOS kernel
application
powermanagement

Jožef Stefan International Postgraduate School 81
OSs for RT ApplicationsOSs for RT Applications
►Basics of RTOSs.Basics of RTOSs.►Scheduling modeling assumptions.Scheduling modeling assumptions.► Interprocess communication.Interprocess communication.►Power management.Power management.►Examples of commercial RTOSs.Examples of commercial RTOSs.

Jožef Stefan International Postgraduate School 82
Examples of commercial RTOSs Examples of commercial RTOSs (1)(1)
► RTOSsRTOSs: VxWorks (VRTX), QNX, LynxOS, : VxWorks (VRTX), QNX, LynxOS, eCos, DeltaOS, PSX, embOS, ...eCos, DeltaOS, PSX, embOS, ... satisfy the standard Real-Time POSIX 1003.1 satisfy the standard Real-Time POSIX 1003.1
(pre-emptive fixed-priority scheduling, (pre-emptive fixed-priority scheduling, synchronization methods, task scheduling synchronization methods, task scheduling options).options).
► Because people love Because people love general-purpose OSsgeneral-purpose OSs:: RTLinux (FSMLabs),RTLinux (FSMLabs), Linux/RT (TimeSys),Linux/RT (TimeSys), Windows CE, ...Windows CE, ...

Jožef Stefan International Postgraduate School 83
Examples of commercial RTOSs Examples of commercial RTOSs (2)(2)
► LynxOSLynxOS:: Microkernel architecture Microkernel architecture
that provides scheduling, that provides scheduling, interrupt & interrupt & synchronization supportsynchronization support
Real-time POSIX supportReal-time POSIX support Easy transition from Easy transition from
LinuxLinux
► VxWorksVxWorks:: Monolithic kernel (reduces Monolithic kernel (reduces
run-time overhead, but run-time overhead, but has an increased kernel has an increased kernel size compared to size compared to microkernel designs)microkernel designs)
Real-time POSIX supportReal-time POSIX support Common in industry:Common in industry:
► Mars missionMars mission► Honda ASIMO robotHonda ASIMO robot► SwitcesSwitces► MRI scannersMRI scanners► Car engine control Car engine control
systems systems

Jožef Stefan International Postgraduate School 84
Examples of commercial RTOSs Examples of commercial RTOSs (3)(3)
► RTLinuxRTLinux:: Dual-kernel Dual-kernel
approach:approach:► Makes Linux a low-Makes Linux a low-
priority pre-emptable priority pre-emptable thread running on a thread running on a separate RTLinux separate RTLinux kernel;kernel;
► Tradeoff between Tradeoff between determinism of pure determinism of pure RTOSs and flexibility RTOSs and flexibility of GPOSs.of GPOSs.
Periodic tasks only.Periodic tasks only.

Jožef Stefan International Postgraduate School 85
Open IssueOpen Issuess - - Multi-criteria Multi-criteria Optimization Problems (1)Optimization Problems (1)
► HW/SW partitioning:HW/SW partitioning: By evolutionary By evolutionary
algorithms & algorithms & genetic algorithms, genetic algorithms, Lothar Thiele, ETH.Lothar Thiele, ETH.

Jožef Stefan International Postgraduate School 86
Open IssueOpen Issuess - - Multi-criteria Multi-criteria Optimization Problems (2)Optimization Problems (2)
► CConfigurable onfigurable processor processor technology technology TensilicaTensilica ((http://www.tensilica.comhttp://www.tensilica.com
):): fitting the fitting the
processor to the processor to the algorithm;algorithm;

Jožef Stefan International Postgraduate School 87
EU Technological platform EU Technological platform ARTEMISARTEMIS

Jožef Stefan International Postgraduate School 88
Organization (1)Organization (1)
►ConsultationConsultation: JSI / room S6D, (01) : JSI / room S6D, (01) 4773-363, [email protected] 4773-363, [email protected]
►Next lectureNext lecture: 4: 4thth March, 2008 March, 2008►Web page Web page (course material): (course material):
csd.ijs.si/korousic/korousic.htmlcsd.ijs.si/korousic/korousic.html

Jožef Stefan International Postgraduate School 89
Organization (2)Organization (2)
►ReferencesReferences:: J. Cooling, Software Engineering for Real-J. Cooling, Software Engineering for Real-
Time Systems, Addison-Wesley, 2003;Time Systems, Addison-Wesley, 2003; F. Vahid, T.Givargis, Embedded System F. Vahid, T.Givargis, Embedded System
Design – A Unified Hardware/Software Design – A Unified Hardware/Software Introduction, Wiley, 2002;Introduction, Wiley, 2002;
IEEE Computer, Vol. 40, No. 10, October IEEE Computer, Vol. 40, No. 10, October 2007;2007;
http://www.echelon.com/solutions/industrial/appshttp://www.echelon.com/solutions/industrial/appstories/tories/
http://www.mathworks.fr/products/simulink/demohttp://www.mathworks.fr/products/simulink/demos.html?file=/products/demos/wt/s.html?file=/products/demos/wt/spacecraft.htmspacecraft.htmll

Jožef Stefan International Postgraduate School 90
Organization (3)Organization (3)
►Course materialCourse material:: slide copies, slide copies, books, books, paperspapers
►ExamExam: : seminar work OR seminar work OR oraloral exam exam May, June, SeptemberMay, June, September