Embed Size (px)
Citation preview

Real-Time Detection of Multiple Moving Objects in Complex Image Sequences
International journal of
imaging systems and technology
10,305-317,1999Speaker: M. Q. Jing

Outline Introduction Change Detection Algorithms
Simple difference method Derivative model Shading model LIG model
Binary Statistical Morphology Multiple object detection Result & Conclusion

Introduction(1) Change detection (CD) is an process for many
machine vision systes Track moving object Analyze the traffic flow Guide autonomous vehicles
Task: finding significant differences between images
Difference may be caused by Motion of the camera Entrance or exit of an object from the scene Change in illuminations & Bad environmental
conditions

Introduction(2) CD is performed at pixel, edge or
higher feature levels. Feature levels require more
computational effort
CD take two digital images as input. The output is a binary image

Change Detection Algorithms -- Simple Difference(SD) method
Input: Two N x N digitized images It(x,y), It-1(x,y)
Output: Binary image Bt(x,y)
Dt(x,y)=| It(x,y), It-1(x,y) |
otherwise 1
),(D if 0),( t thyxyxBt
Fig 2: a,b
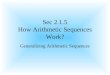
Change Detection Algorithms --Derivative Model (DM)
otherwise1
Lth L if,0y)(x,B .3 Step
22L 2. Step
and .1 Step
ji,t
22
2222
ji,ji
ji
ji
ji
nxnInxnI
Fig 2: c,d

Change Detection Algorithms --Shading Model (SM)
The intensity Ip at point (x,y)Ip= Ii * Sp , where Ii = illumination
Sp = shading coefficient
Calcuate the varance of the intensity Ip/Ip-1
0 => no changed Fig2 (e,f)

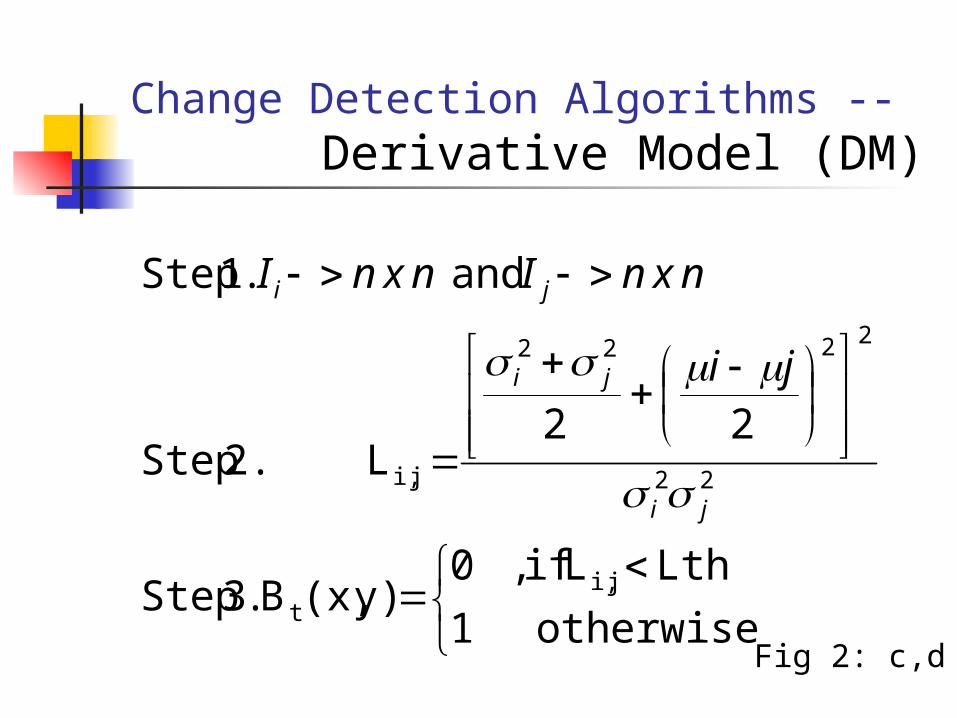
Change Detection Algorithms -- Local intensity gradient(LIG) method
Pixels at the location having a high gray-level gradient form a part of an object
Nearly pixles having similar gray levels will be also part of the same object.
Large negative gradients at pixels belonging to object boundaries
)}1,1(),(min{),( yxIyxIyxG
Change Detection Algorithms -- Local intensity gradient(LIG) method
1: I -> G(I) 2: G(I) -> m x m blocks
Limit the effects of illumination changing 3: for each block, calcuating the mean &
variance 4: regional means and variances are
smoothed using the neighboring regions 5. then interpolated to fill an m x m again 6 compare with background and foregound
Fig 2: I,l

Binary statistical morphology Mathematical morphology(MM) describe
images as sets and image-porcessing operators.
The main drawback of such operators is the high sensitivity to noise
Statistical morphology provides a noise-robust probabilistic generalization of MM.

Binary statistical morphology SM interprets erosion and dilation
as probabilistic lta and wta operator
Statistical erosion & statistical dilation = minimum variance estimators of the ouput distribution, P(H|I)

Binary statistical morphology SD computed at an image location
m as:
Binary Statistical Dilation(BSD) is obtained by threshold SD at value
)1)((
)(E
1
1
m
emMN
emM
B
B
)1,0(
1*
:j
HjBx

NmMmM
XmBcardmM
XmBcardmM
mM
mMNif
mM
mMNif
H
BB
cB
cB
B
B
B
B
m
)()(
)}{()(
)}{()(
)(
)()
1(ln0
)(
)()
1(ln1
01
0
1
1
1
1
1
*

)1()(
}2
1)(:{
],,0[,k xif 1][
}1)]([:{
1
1
i
1
e
NmM
NmMRi
RNxxV
mMVmBx
B
B
ii
Bi
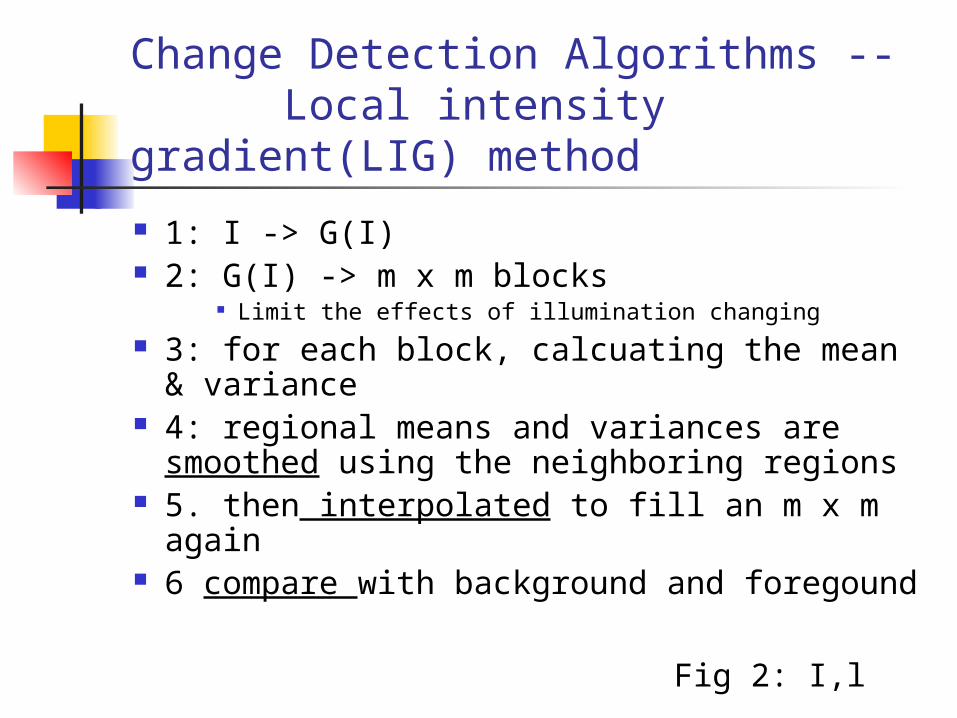
In similar way, Binary Statistical Erosion(BSE)
)1()(
}2
1)(:{
],,0[),2/int(k xif 1][
}1)]([:{
1
1
i
1
e
NmM
NmMRi
R
NxNxV
mMLmBx
B
B
i
i
Bi
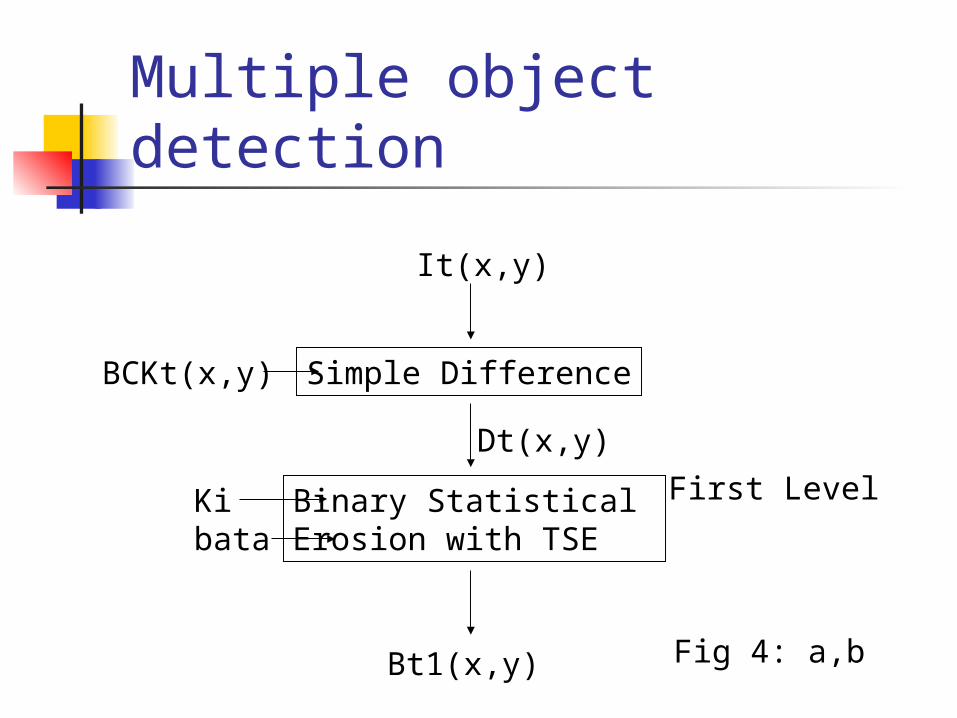
Multiple object detection
Simple Difference
It(x,y)
BCKt(x,y)
Dt(x,y)
Binary Statistical Erosion with TSE
Kibata
Bt1(x,y)
First Level
Fig 4: a,b


Multiple object detection -- The first step
Temporal structuring element (TSE) = 3x3 mask
A low ki value should be selected to maximize the probability of detecting moving object points.
The first level is represent the pixel where are object or background.

Multiple object detection -- The Second step (noise reduction)
Binary Statistical Erosion with TSE1
Bt1(x,y)
Set filtering
Binary Statistical dilation with TSE2
Zt(x,y)
Yt(x,y)
Bt2(x,y)
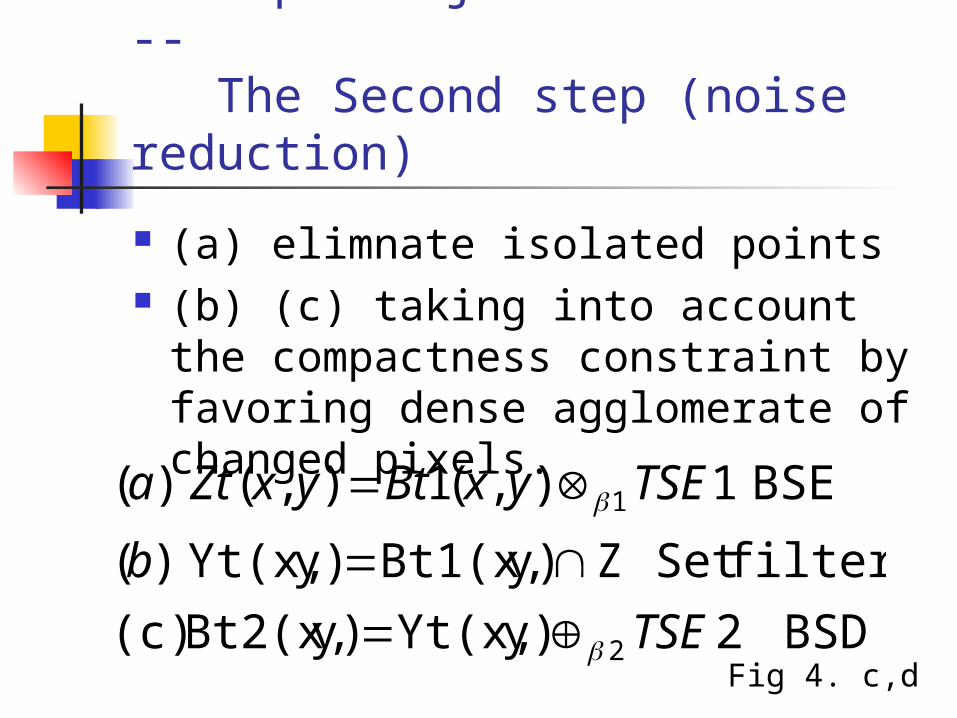
Multiple object detection -- The Second step (noise reduction)
(a) elimnate isolated points (b) (c) taking into account the
compactness constraint by favoring dense agglomerate of changed pixels.
BSD 2y)Yt(x,y)Bt2(x, (c)
filteringSet Zy)Bt1(x,y)Yt(x, )(
BSE 1),(1),( )(
2
1
TSE
b
TSEyxBtyxZta
Fig 4. c,d

Multiple object detection -- The Third step (blob tracking)
Blob tracking is a difficult task Many blobs may appear or vanish in
successive frames Blobs may be occluded by
overlapping of other blobs Problems are caused by the high
dimensionality of the set of possible combinations
See Fig 4. e

Multiple object detection -- The Third step (blob tracking)
Step1: a blob is not expected to be too far from where it was in the previous frame. Choose a mask,(2u*cosa+1 ) in x
direction and 2u*sina+1 in y direction The mask is centerred in I’s barycenter The blobs in I+1 frame whose
barycenter fall within this mask are selected.

Multiple object detection -- The Third step (blob tracking)
Step2:Let CBt+1(bi)= set of blobs on the
frame t+1 which are candidate to match with the blob bi detected on the frame t
=> 給定一 blob bi 選擇在下一個 frame,落在 bi 範圍內的 blob 集合

)](),(max[
| |
)(
2
1
biCBtu i
t uSuA
totaluuCF
面積附近的在下一個的面積
* 當 blob 大小不變時 ,cost function 值最小
A(v) )(
)](),(max[
|)()(|
CB(u)v
)(
2
1
uS
where
uSuA
uSuACF
i
biCBtu i
it
The cost function

Result-- The detection performance Tests on Outdoor Scenes
Fig 5. The detection performance
P=(correctly identified #) / (the method detected #)
即在此方法所有 detected 的 blob 中 , 有幾個是正確的 . R=(correct detected #)/ (original image #) G={(correctly identified #) -(false detected #)}/ (original image #)
Fig 7.

Result-- The Illumination conditions
Fig 8;

Result-- Overflow error & gap error
otherwise
iririf
where
iherrorGap
otherwise
iririf
where
igerrorOverflow
gr
H
i
gr
H
i
0
1)]()([1g(i)
)(k
1(Eo)
0
1)]()([1g(i)
)(k
1(Eo)
1
1
• r(i)=1, if i belong to the detected blob• rgr(i) =1, if i belong to the manually extracted blobs
Fig 9

Result-- Test on Noisy Images A random noise with uniform
distrubution was added to some frames of the image sequence.
Fig 10(a) SD and SM method could not be
applied to very noisy images. Fig 10(b) is proposed method result. Fig 11(a) is different noise level
result

Result-- Time performance The time performance of the
different CD methods were compared.
SD and proposed method are 10 times fast than the SM and DM
15 times faster than the LIG method

Conclusion If the system works outdoors and
in badly illuminated enviroments, => LIG , the proposed method If real-time is required, => the proposed method

Fig1: Original

Fig 2
SD method
DM method

Fig 2: SM result

Fig 2:LIG Result

Fig4:the proposed result

Fig5: more complex
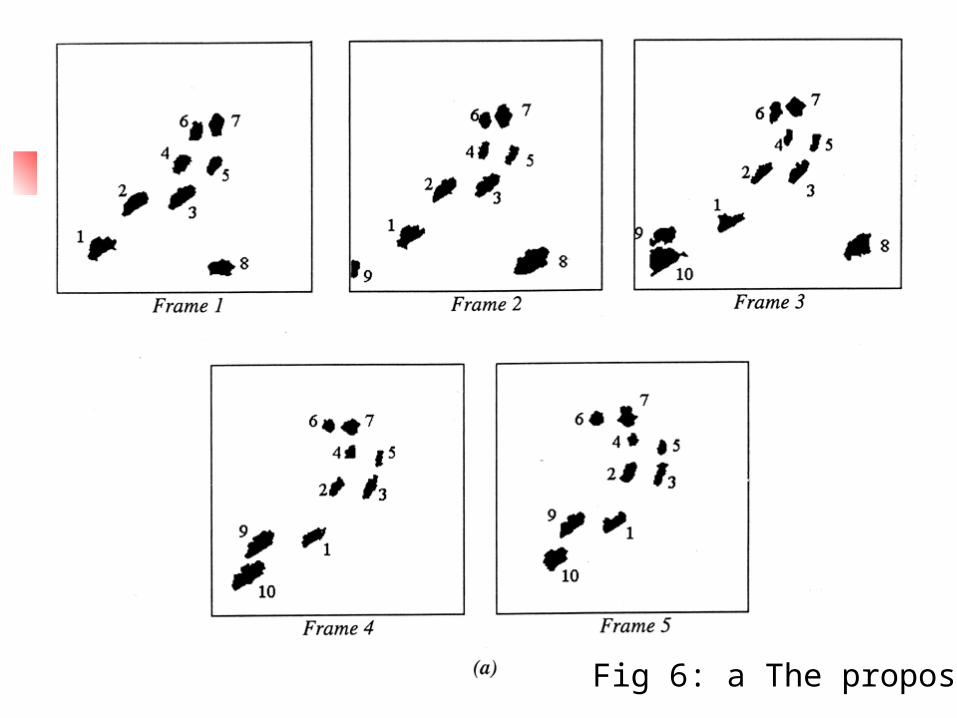
Fig 6: a The proposed

Fig6:b SD result

Fig 6: c SM result

Fig 6: d LIG result
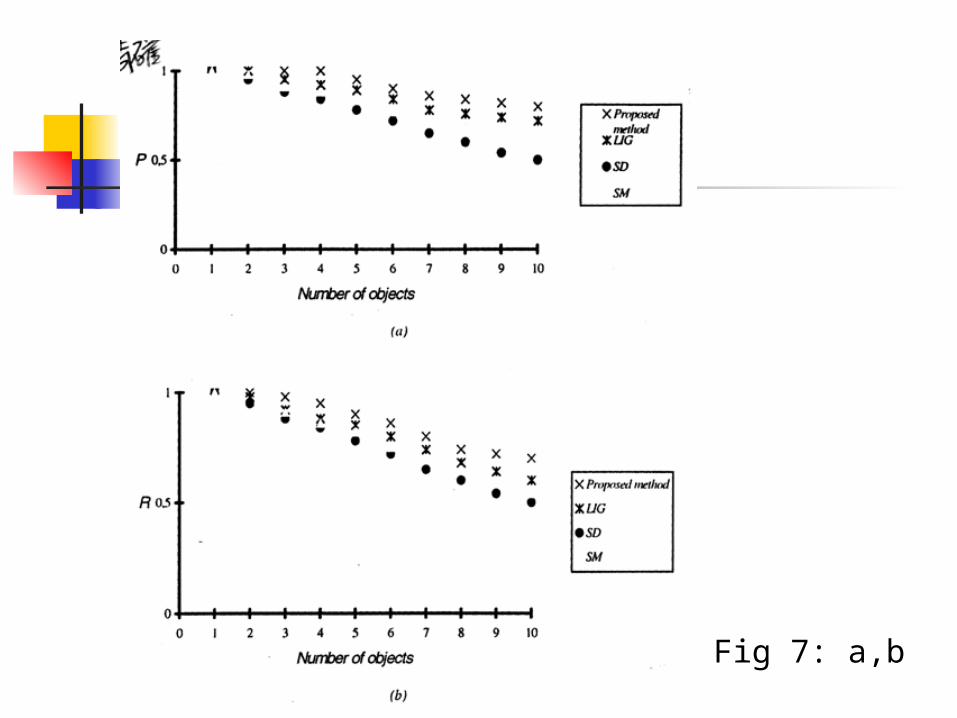
Fig 7: a,b

Fig 7: c

Fig 8: illum result
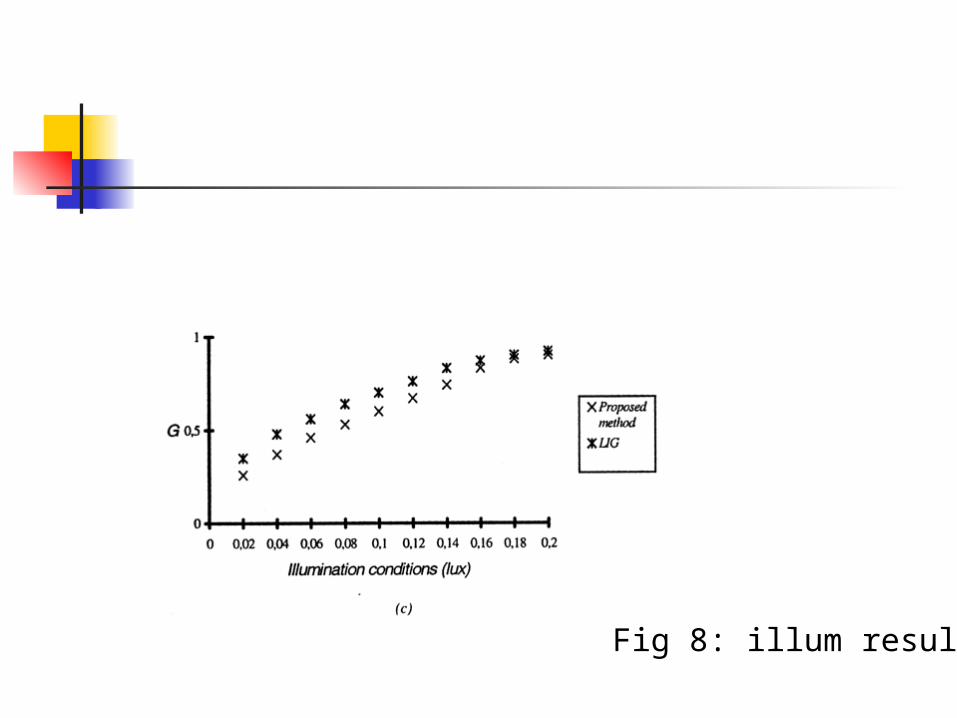
Fig 8: illum result
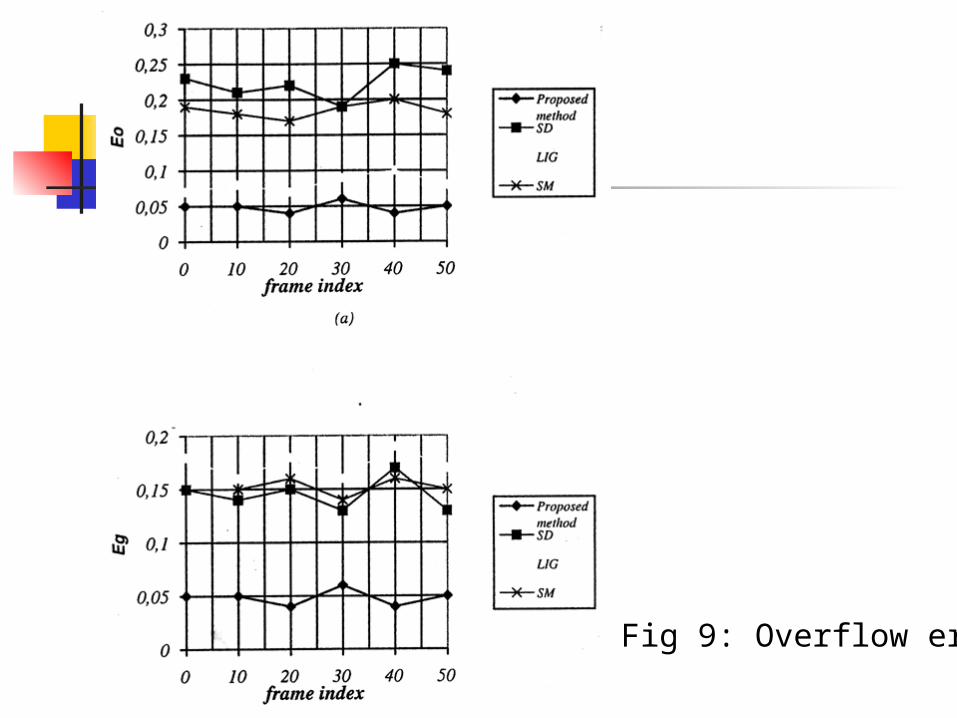
Fig 9: Overflow err

Fig 10 Noise