-
8/10/2019 Real-Time Controllers Phillips
1/29
Real-Time Controllers
Brian Phillips
-
8/10/2019 Real-Time Controllers Phillips
2/29
Real-Time Controllers
Overview and capabilities
Use in industry
System details
Products xPC Target
dSpace
CompactRIO Use in research
Concluding remarks
-
8/10/2019 Real-Time Controllers Phillips
3/29
Real-Time Controllers
Overview and capabilities
Use in industry
System details
Products xPC Target
dSpace
CompactRIO Use in research
Concluding remarks
-
8/10/2019 Real-Time Controllers Phillips
4/29
Overview
Basic idea: combines control and dataacquisition with dedicated,
fast hardware
Advantages: speed, reliability, and versatility Disadvantages:
cost, mess of buzzwords,
steep learning curve
Current status: used extensively throughoutautomotiveand
aerospaceindustry andsomewhat in communication, power,
andautomation
-
8/10/2019 Real-Time Controllers Phillips
5/29
Capabilities
Efficient computing facilitates real-time control
Dedicated devices can be more compact andportable than desktop
computers
Many flexible alternatives available with expandableand
interchangeable I/O cards and panels
Allow for rapid prototyping of system usingcombination of
numerical and analytical components
Simulation of complex environment for exhaustivetesting of
existing component
Definition: The process of quickly assembling a working model to
evaluateportions of the design. Aimed at reducing risk and
cost.Definition: Ratio of simulation time to actual time is 1:1
-
8/10/2019 Real-Time Controllers Phillips
6/29
Prototyping
Simulation
System of Interest
System of Interest
-
8/10/2019 Real-Time Controllers Phillips
7/29
Real-Time Controllers
Overview and capabilities
Use in industry
System details
Products xPC Target
dSpace
CompactRIO Use in research
Concluding remarks
-
8/10/2019 Real-Time Controllers Phillips
8/29
Uses in Automotive
Prototype electronic control unit (ECU) fordesign and testing
Engine control unit
Climate control unit Speed control unit
Anti-lock brakes, etc
Simulate road conditions for exhaustingvirtual testing of ECUs
(virtual plant)
Complications of alternative fuel cars
Prototype:
ECU
Plant:
Car
-
8/10/2019 Real-Time Controllers Phillips
9/29
Uses in Aerospace Simulate flight loads on components Evaluate
pressure and climate control strategies
Prototype vibration control strategies
-
8/10/2019 Real-Time Controllers Phillips
10/29
-
8/10/2019 Real-Time Controllers Phillips
11/29
Real-Time Controllers
Overview and capabilities
Use in industry
System details
Products xPC Target
dSpace
CompactRIO Use in research
Concluding remarks
-
8/10/2019 Real-Time Controllers Phillips
12/29
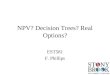
Typical Components for
Hardware-in-the-Loop Simulation
Host computer Real-time target computer
I/O Cards
CodeGeneration
Apply Excitation
Measure Feedback
Experiment
Host PC
SimulinkLabview
Monitor Results
Definition: Simulation technique where anembedded system (actual
electronic or physical
component of interest) is tested in real-time with aplant
simulation (numerical model of the remainingsystem components)
Target PC
-
8/10/2019 Real-Time Controllers Phillips
13/29
Inner Workings of a Real-Time
Controller
CompactRIO Data Flow Diagram, courtesy of NI
-
8/10/2019 Real-Time Controllers Phillips
14/29
Real-time controller types
Single card
Fits inside host computer
Require I/O panel
Dedicated Unit
Modular
Full scale
Industrial level application
Very large
-
8/10/2019 Real-Time Controllers Phillips
15/29
-
8/10/2019 Real-Time Controllers Phillips
16/29
xPC Target
Produced by the MathWorks, the samecompany as Matlab
Focused around engineer friendly Matlab
Designed to work with Simulink and RealTime Workshop
Laptop host with compact target
-
8/10/2019 Real-Time Controllers Phillips
17/29
xPC Target Advantages
Target system may be any computer, utilizing over250 standard
I/O boards, including NI
Inexpensive, on the order of $5,000, depending ontypes of I/O
cards
xPC Target Disadvantages The Mathworks does not manufacture
hardware
User must create target PC to suit their own needs,requiring
familiarity with signal conditioning A/Dconversion, computer
hardware, etc.
Arguably the least proven real-time control system
of the three
-
8/10/2019 Real-Time Controllers Phillips
18/29
dSpace
Produced by dSpace, headquartered inGermany
Designed to work with Simulink and RealTime Workshop
Large footprint in the automotive andaerospace industry
Mid-SizeDedicated Unit
-
8/10/2019 Real-Time Controllers Phillips
19/29
dSpace Advantages
Experienced company, founded in 1988 (Germany)and 1991 (North
America)
Very proven system, especially in the automotivesector (13,000
systems worldwide)
Clients range from Boeing to Volkswagen Numerous success
stories
Extensive array of software, simulation packages,visualization
tools, hardware options
dSpace Disadvantages
Expensive, on the order of $30,000 for basic system
-
8/10/2019 Real-Time Controllers Phillips
20/29
CompactRIO
Produced by National Instruments
Designed to work with LabVIEW Real-Timeapplications
Focus on standalone hardware device
CompactRIO
-
8/10/2019 Real-Time Controllers Phillips
21/29
CompactRIO Advantages
NI heavily pushing CompactRIO
Rugged construction (50 g shock protection!)
LabVIEW derivatives at core of modeling
Moderately priced at $15,000 for basic system
CompactRIO Disadvantages
Can use Simulink and Real-Time Workshop,but in a roundabout
way
Requires both knowledge of Simulink and
LabVIEW
-
8/10/2019 Real-Time Controllers Phillips
22/29
Real-Time Controllers
Overview and capabilities
Use in industry
System details
Products xPC Target
dSpace
CompactRIO Use in research
Concluding remarks
-
8/10/2019 Real-Time Controllers Phillips
23/29
Research Applications
Hybrid Testing
Embedded system: experimental substructure
Plant simulation: numerical substructure
Prototyping of structural control algorithms
Active energy dissipation devices
Active mass dampers, actuators
Semi-active energy dissipation devices
Variable orifice dampers, MR dampers
-
8/10/2019 Real-Time Controllers Phillips
24/29
Application in Hybrid Testing
k2
G
Force Factor
Numerical Stiffness
k1
Key
AccelerationForce
Displacement
k1
m
c
Discrete State-Space
Servo Control Loop
k2
ExperimentalStiffness
Real-Time Controller
Structure of Interest
gx
GroundMotion
-
8/10/2019 Real-Time Controllers Phillips
25/29
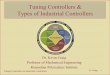
Laboratory
Application
Actuator
LVDT
Specimen
dSpace Computer
I/O Panel
Servovalve
Load Cell
Servo Controller
Servo Control Loop
Real-Time Controller
Experiment
-
8/10/2019 Real-Time Controllers Phillips
26/29
Real-Time Controllers
Overview and capabilities
Use in industry
System details
Products xPC Target
dSpace
CompactRIO Use in research
Concluding remarks
-
8/10/2019 Real-Time Controllers Phillips
27/29
Conclusions
Technology readily available for real-time control
Requires some detailed investigation
Choice of system depends on
Budget, number of channels, sample rate, comfort
Advances will lead to wider use
Increase sampling rate
Increase number of I/O channels
Potentially increase number of competitors
Decrease cost
-
8/10/2019 Real-Time Controllers Phillips
28/29
Main References
dSPACE
http://www.dspaceinc.com/
The Mathworks
http://www.mathworks.com/products/xpctarget/
National Instruments
http://www.ni.com/compactrio/
-
8/10/2019 Real-Time Controllers Phillips
29/29
Thank you