Embed Size (px)
Citation preview
||Autonomous Systems Lab
151-0851-00 VLecture: Tuesday 10:15 – 12:00 CAB G11Exercise: Tuesday 14:15 – 16:00 every 2nd week
Marco Hutter, Michael Blösch, Roland Siegwart, Konrad Rudin and Thomas Stastny
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 1
Robot Dynamics Multi-body Dynamics
||Autonomous Systems Lab 15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 2
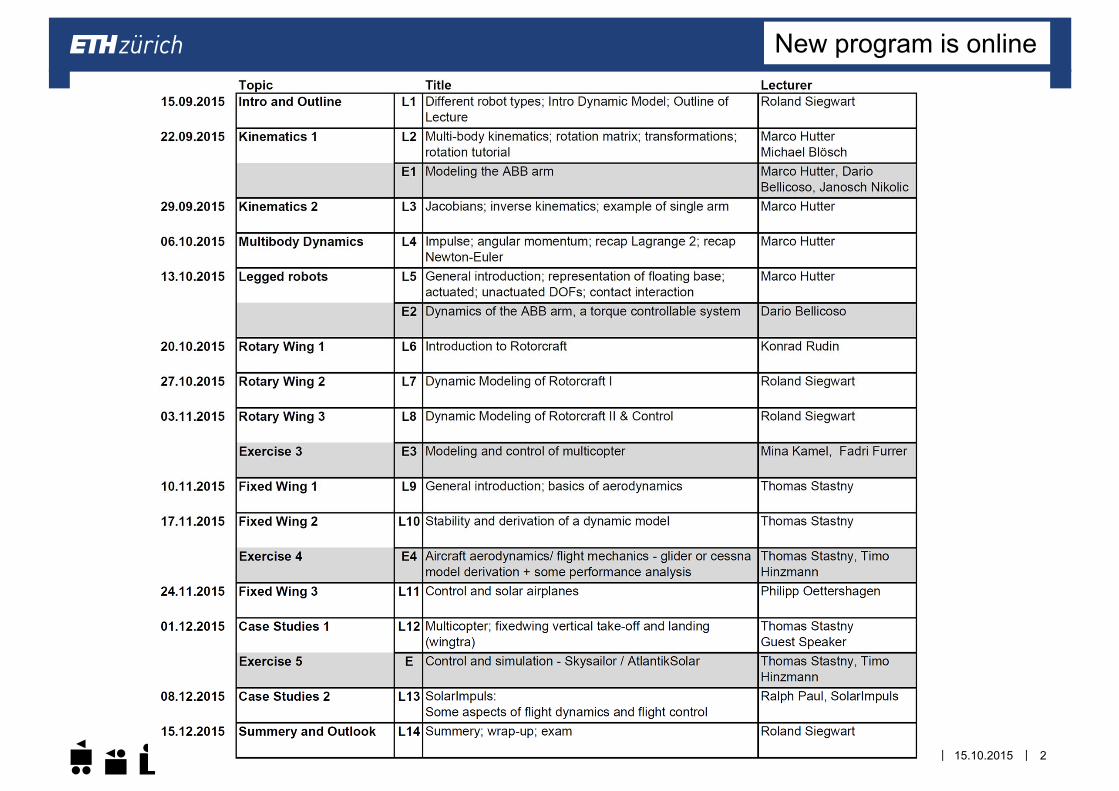
New program is online
||Autonomous Systems Lab
Kinematics = description of motions Translations and rotations Various representations (Euler, quaternions, etc.) Instantaneous kinematics Jacobians and basic Jacobians Inverse kinematics and control Outlook to floating base systems (unactuated base and contacts)
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 3
Recapitulation of Kinematics
||Autonomous Systems Lab 15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 4
Dynamics in Robotics
||Autonomous Systems Lab
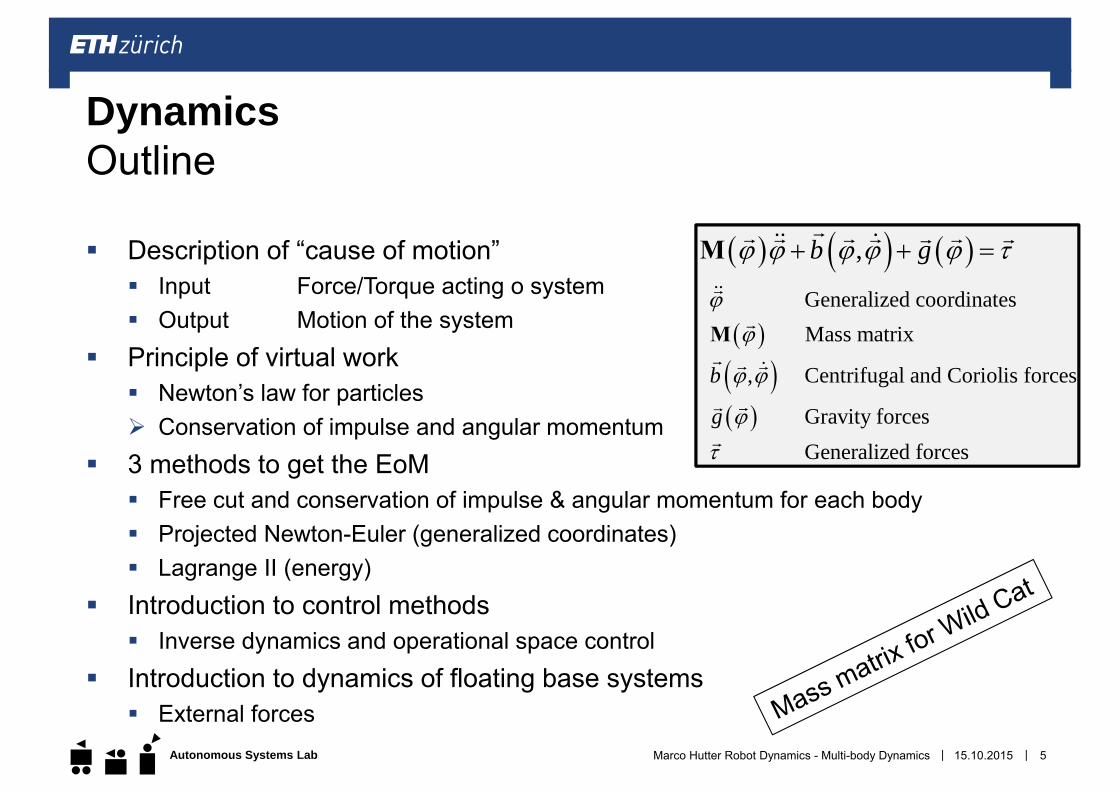
Description of “cause of motion” Input Force/Torque acting o system Output Motion of the system
Principle of virtual work Newton’s law for particles Conservation of impulse and angular momentum
3 methods to get the EoM Free cut and conservation of impulse & angular momentum for each body Projected Newton-Euler (generalized coordinates) Lagrange II (energy)
Introduction to control methods Inverse dynamics and operational space control
Introduction to dynamics of floating base systems External forces
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 5
DynamicsOutline
,b g M
Generalized coordinates Mass matrix
, Centrifugal and Coriolis forces
Gravity forces Generalized forces
b
g
M
||Autonomous Systems Lab
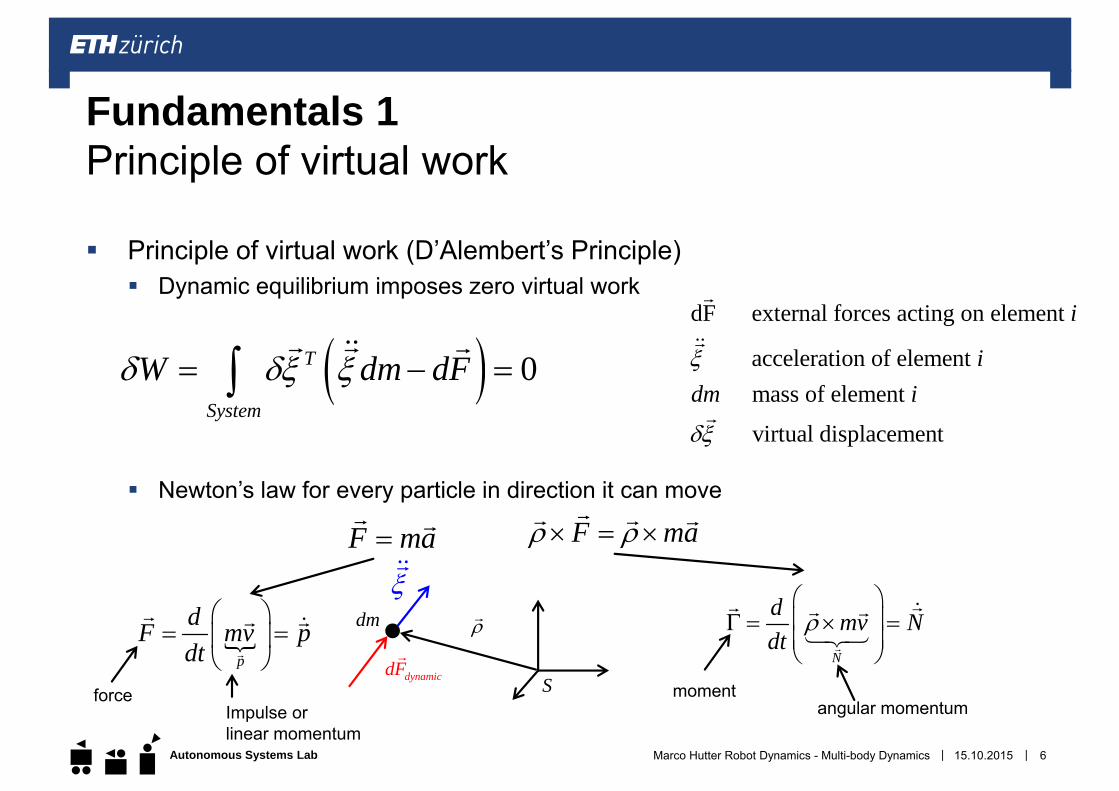
Principle of virtual work (D’Alembert’s Principle) Dynamic equilibrium imposes zero virtual work
Newton’s law for every particle in direction it can move
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 6
Fundamentals 1Principle of virtual work
dF external forces acting on element
acceleration of element mass of element
virtual displacement
i
idm i
0T
System
W dm dF
dynamicdF
dm
F ma
S
F ma
p
dF mv pdt
Impulse orlinear momentum
force
N
d mv Ndt
angular momentummoment
||Autonomous Systems Lab
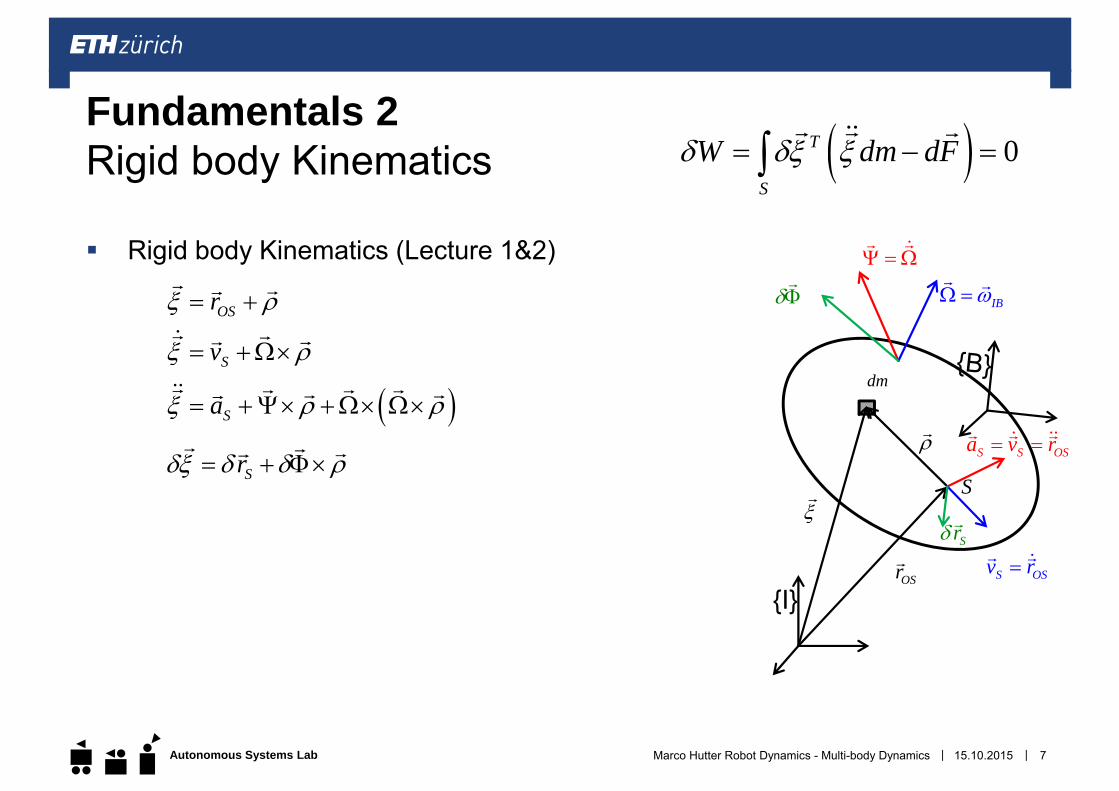
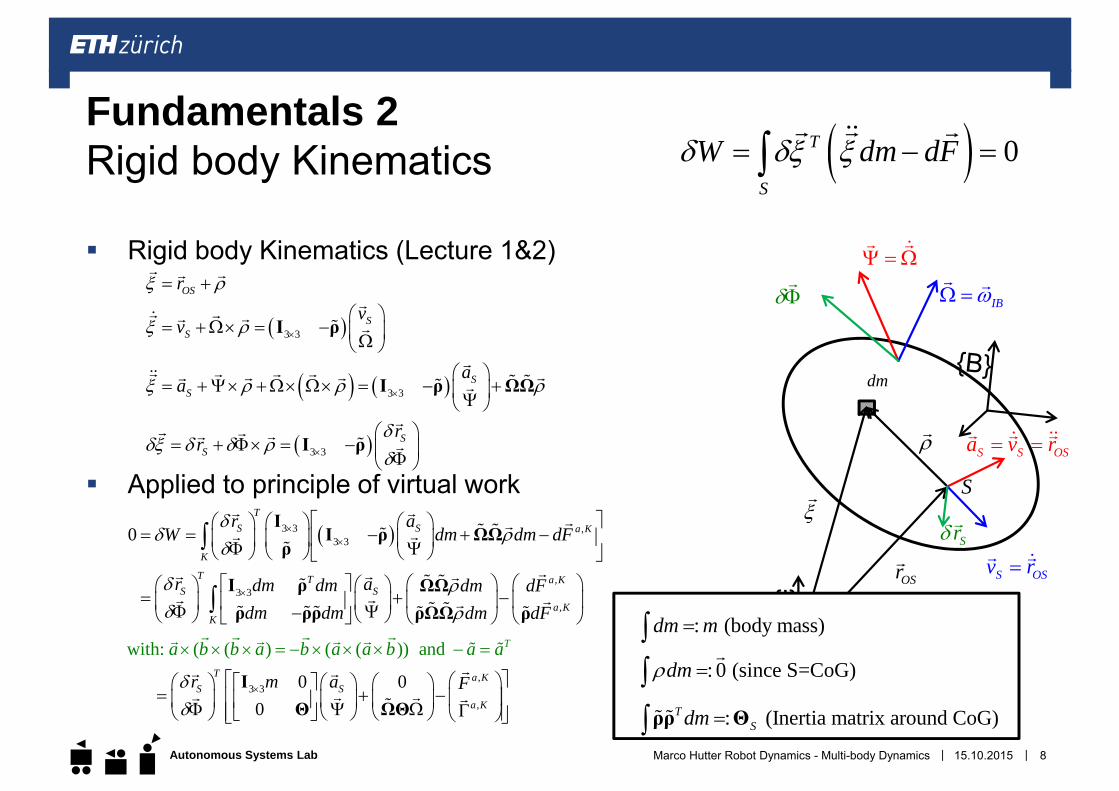
Rigid body Kinematics (Lecture 1&2)
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 7
Fundamentals 2Rigid body Kinematics
dm
I
S
OSr
OSr
S OSv r
S S OSa v r
IB
Sr
0T
S
W dm dF
Sr
Sa
Sv
||Autonomous Systems Lab
Rigid body Kinematics (Lecture 1&2)
Applied to principle of virtual work
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 8
Fundamentals 2Rigid body Kinematics
dm
I
S
OSr
3 3
3 3
3 3
OS
SS
SS
SS
rv
v
aa
rr
I ρ
I ρ ΩΩ
I ρ
S OSv r
S S OSa v r
IB
Sr
0T
S
W dm dF
,3 3
,
with: ( ( )
0
( ( )) a
0
nd
0T aS S
K
T
K
a
r m a F
a b b a b a a b a a
IΘ ΩΘ
: (body mass)dm m: 0 (since S=CoG)dm
: (Inertia matrix around CoG)TSdm ρρ Θ
3 3 ,3 3
,3 3
,
0T
S S a K
K
T T a KS S
a KK
r aW dm dm dF
r adm dm dm dFdm dm dm dF
II ρ ΩΩ
ρ
I ρ ΩΩρ ρρ ρΩΩ ρ
||Autonomous Systems Lab
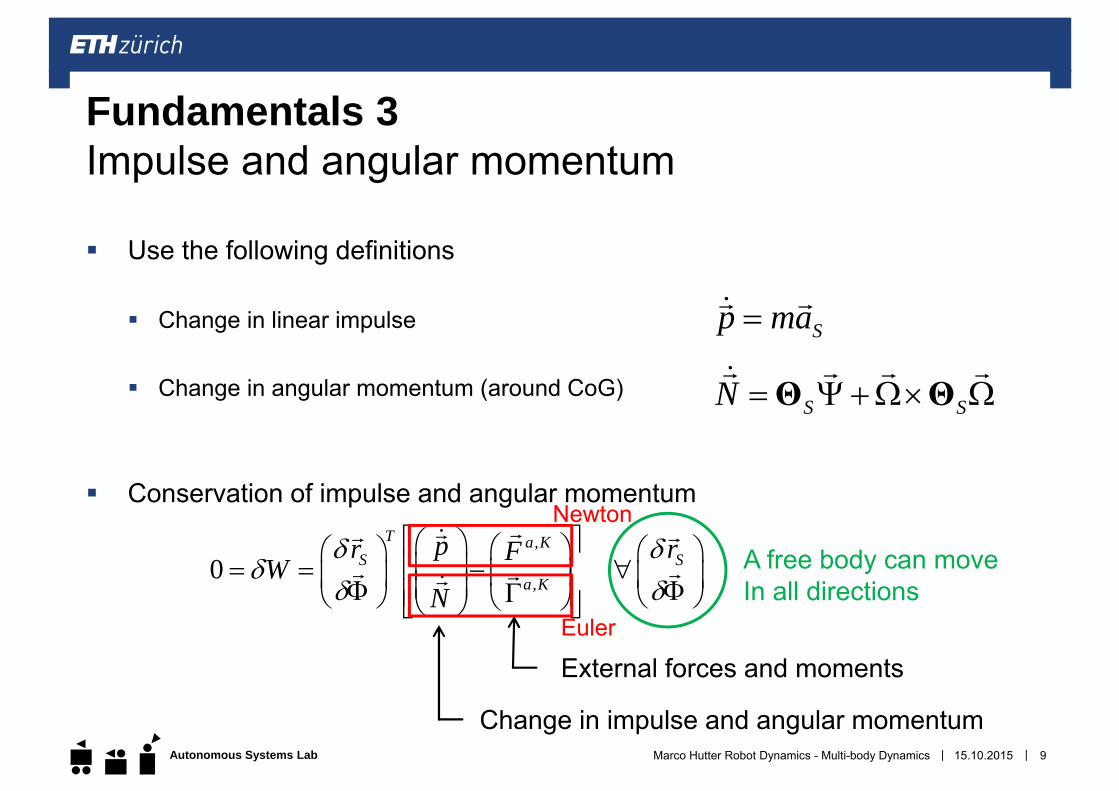
Use the following definitions
Change in linear impulse
Change in angular momentum (around CoG)
Conservation of impulse and angular momentum
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 9
Fundamentals 3Impulse and angular momentum
Sp ma
S SN Θ Θ
,
,0
T a KS S
a K
pr rFWN
External forces and moments
Change in impulse and angular momentum
Newton
Euler
A free body can move In all directions
||Autonomous Systems Lab
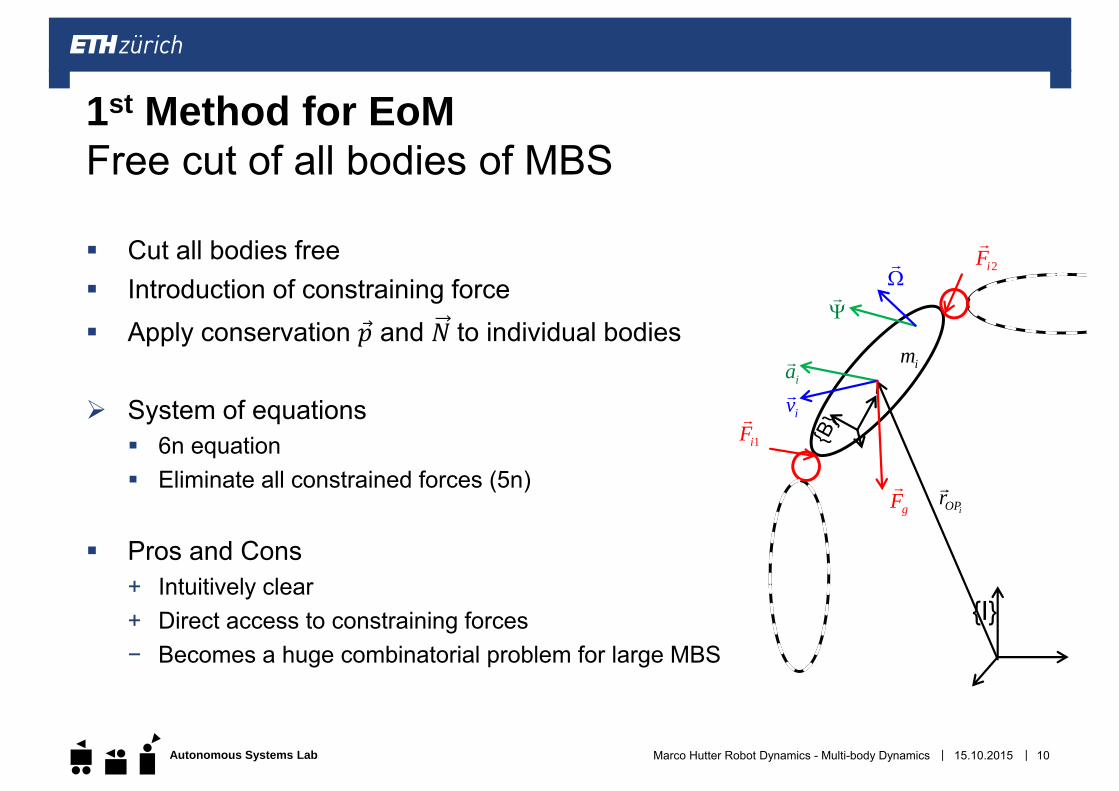
Cut all bodies free Introduction of constraining force Apply conservation and to individual bodies
System of equations 6n equation Eliminate all constrained forces (5n)
Pros and Cons+ Intuitively clear + Direct access to constraining forces− Becomes a huge combinatorial problem for large MBS
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 10
1st Method for EoMFree cut of all bodies of MBS
I
iOPr
ivia
gF
1iF
2iF
im
||Autonomous Systems Lab
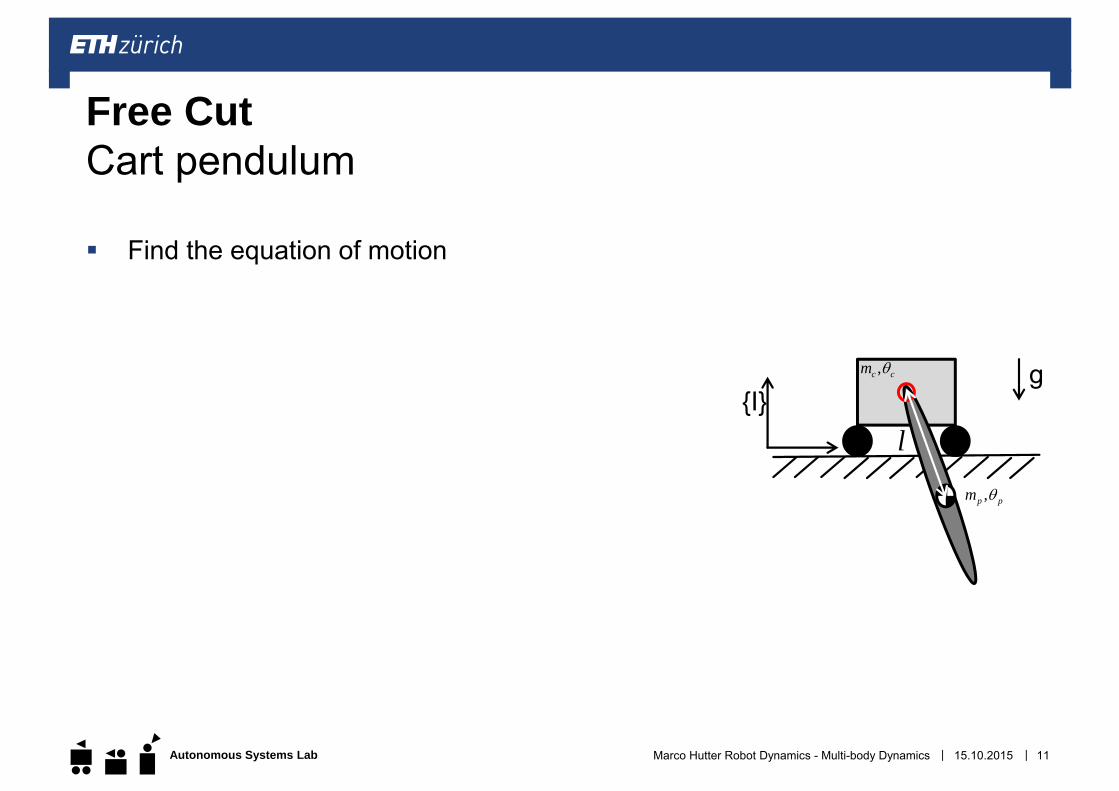
Find the equation of motion
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 11
Free CutCart pendulum
g
,p pm
,c cm
Il
||Autonomous Systems Lab
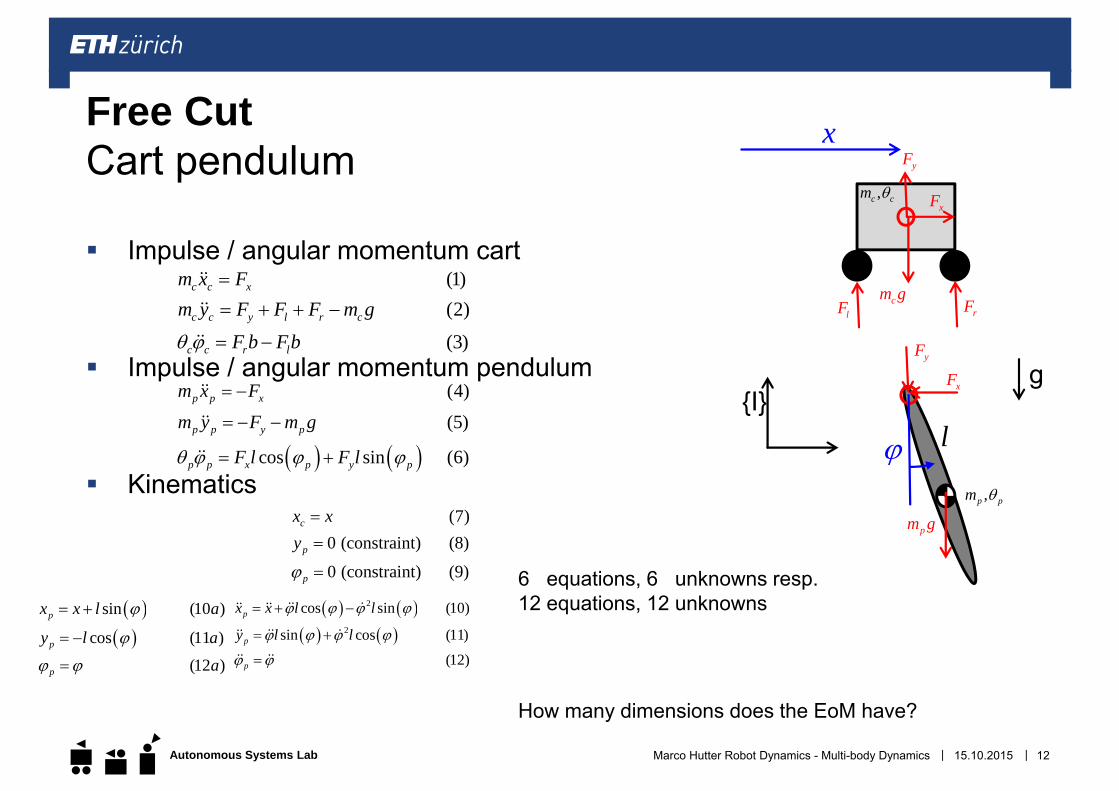
Impulse / angular momentum cart
Impulse / angular momentum pendulum
Kinematics
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 12
Free CutCart pendulum
(1)(2)
(3)
c c x
c c y l r c
c c r l
m x Fm y F F F m g
F b Fb
(4)
(5)
cos sin (6)
p p x
p p y p
p p x p y p
m x F
m y F m g
F l F l
(7)0 (constraint) (8)
0 (constraint) (9)
c
p
p
x xy
sin (10 )
cos (11 )
(12 )
p
p
p
x x l a
y l a
a
2
2
cos sin (10)
sin cos (11)
(12)
p
p
p
x x l l
y l l
g
,p pm
,c cm
pm g
lF rF
xF
yF
yF
xFI
x
l
6 equations, 6 unknowns resp.12 equations, 12 unknowns
How many dimensions does the EoM have?
cm g
||Autonomous Systems Lab
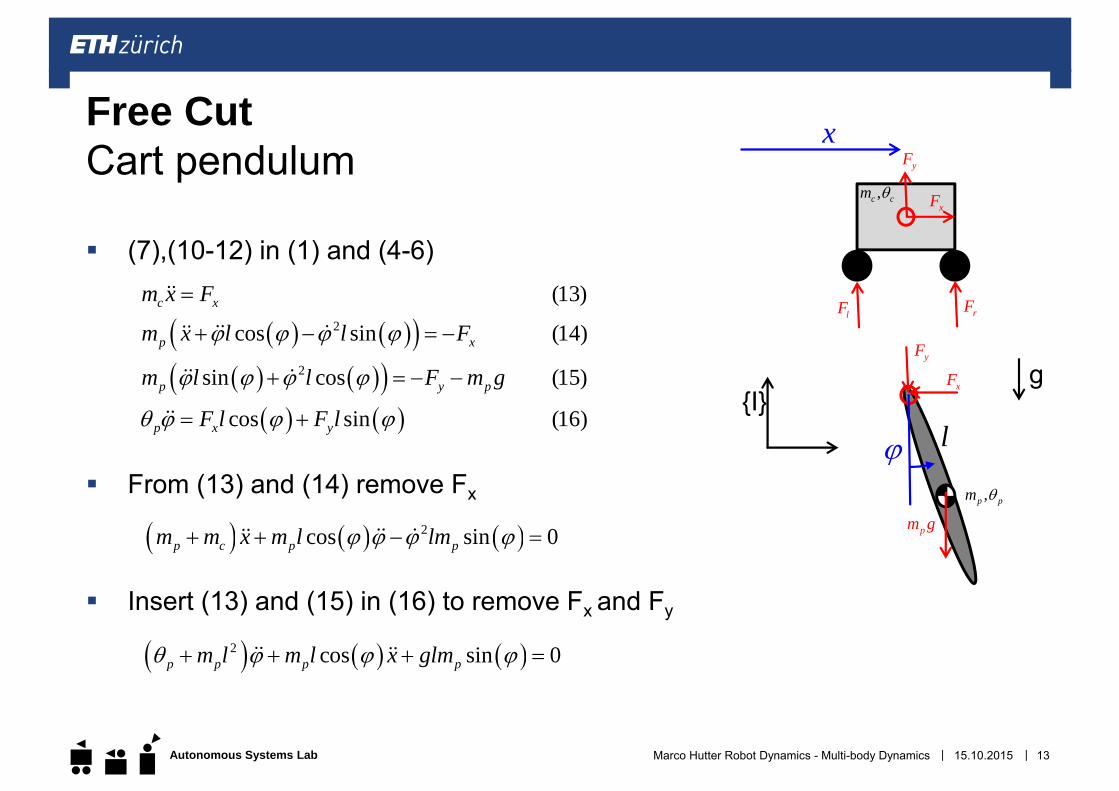
(7),(10-12) in (1) and (4-6)
From (13) and (14) remove Fx
Insert (13) and (15) in (16) to remove Fx and Fy
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 13
Free CutCart pendulum
2
2
(13)
cos sin (14)
sin cos (15)
cos sin (16)
c x
p x
p y p
p x y
m x F
m x l l F
m l l F m g
F l F l
2cos sin 0p c p pm m x m l lm
2 cos sin 0p p p pm l m l x glm
g
,p pm
,c cm
pm g
lF rF
xF
yF
yF
xFI
x
l
||Autonomous Systems Lab
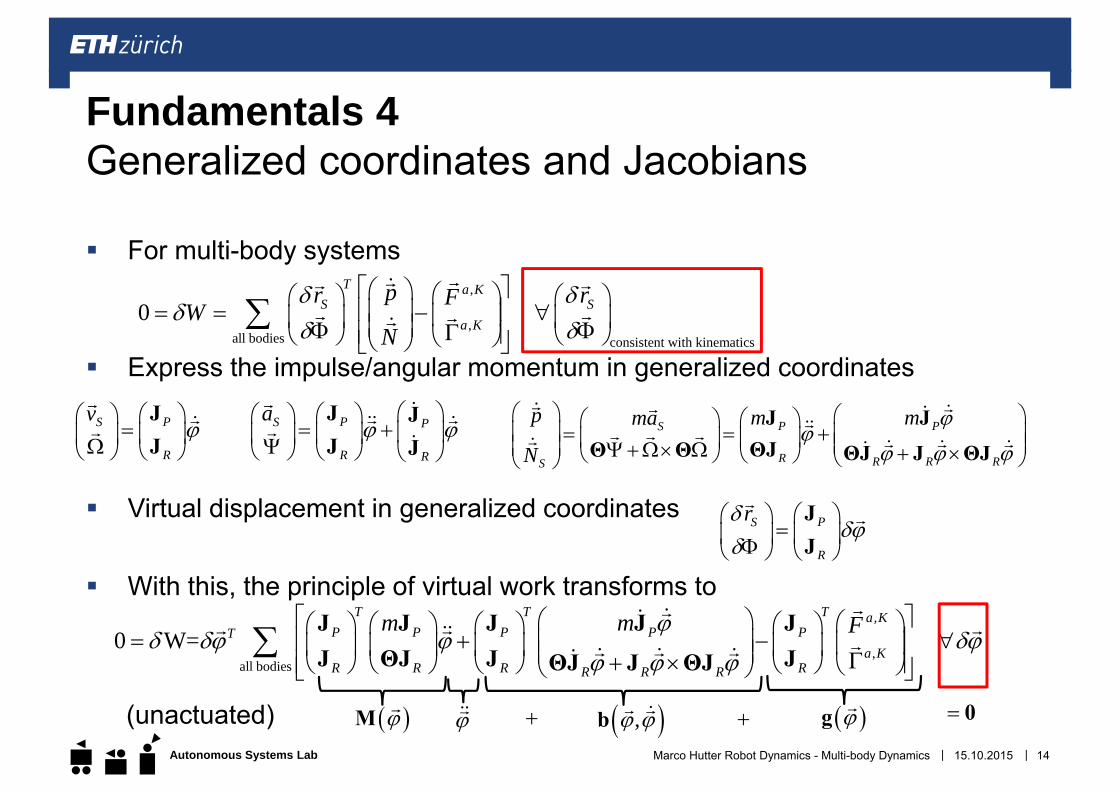
For multi-body systems
Express the impulse/angular momentum in generalized coordinates
Virtual displacement in generalized coordinates
With this, the principle of virtual work transforms to
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 14
Fundamentals 4Generalized coordinates and Jacobians
,
,all bodies consistent with kinematics
0 T a K
S Sa K
pr rFWN
PS
R
v
JJ
PS P
R R
a
J JJ J
P PS
R R R RS
p m mma
N
J JΘJΘ Θ ΘJ J ΘJ
M , b g
0(unactuated)
,
,all bodies
0 W= T T T a K
P P P P PTa K
R R R RR R R
m m F
J J J J JJ ΘJ J JΘJ J ΘJ
PS
R
r
JJ
||Autonomous Systems Lab
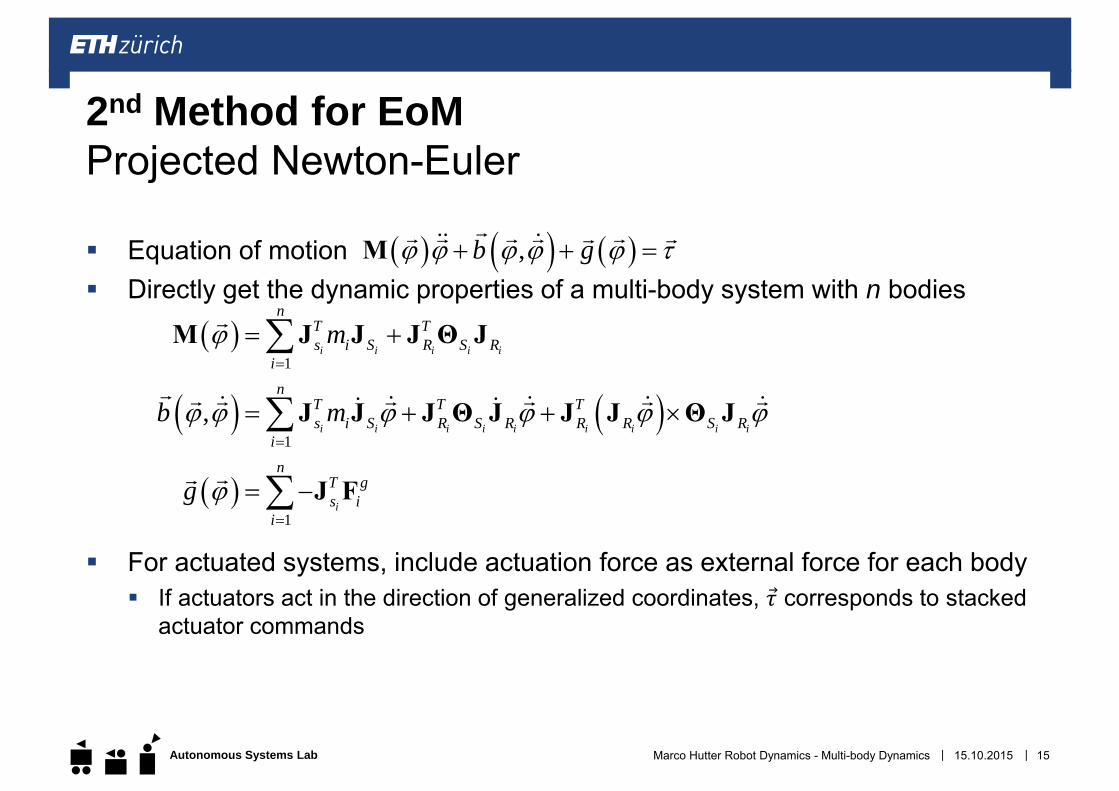
Equation of motion Directly get the dynamic properties of a multi-body system with n bodies
For actuated systems, include actuation force as external force for each body If actuators act in the direction of generalized coordinates, corresponds to stacked
actuator commands
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 15
2nd Method for EoMProjected Newton-Euler
1
1
1
,
i i i i i
i i i i i i i i i
i
nT Ts i S R S R
in
T T Ts i S R S R R R S R
i
nT gs i
i
m
b m
g
M J J J Θ J
J J J Θ J J J Θ J
J F
,b g M
||Autonomous Systems Lab
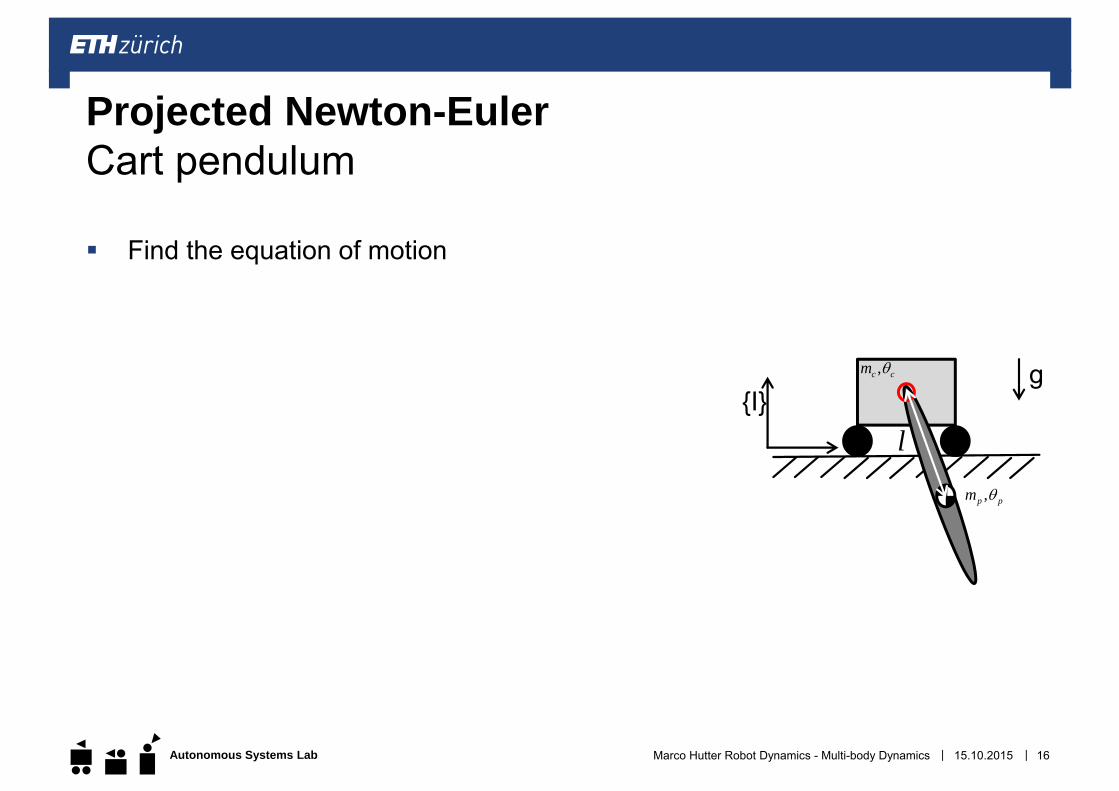
Find the equation of motion
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 16
Projected Newton-EulerCart pendulum
g
,p pm
,c cm
Il

||Autonomous Systems Lab
Kinematics cart and pendulum
Equation of motion
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 17
Projected Newton-EulerCart pendulum
x
0
1 00 0
0 00 0
c
c
OS
OSPc
PcPc
xr
drd
dddt
J
JJ
sincos
1 cos0 sin
0 sin0 cos
p
p
OS
OSPp
PpPp
x lr
l
dr lld
d ld
ldt
J
JJ
2
coscosi i i i
c p pT T T T TP i P R i R Pc c Pc Pp p Pp Rp p Rp
p p p
m m lmm m m
lm m l
M J J J J J J J J J J
0 1
p
pRp
J
i i i i i i
T TP i P R i R R i Rb m J J J Θ J J Θ J
20 (planar system) sin0
T pPp p Pp
lmm
J J
1
0 00sini c p
nT g T Ts i P P
i p pc
gm g m glm g
J F J J
g
,p pm
,c cm
I
x
l
||Autonomous Systems Lab
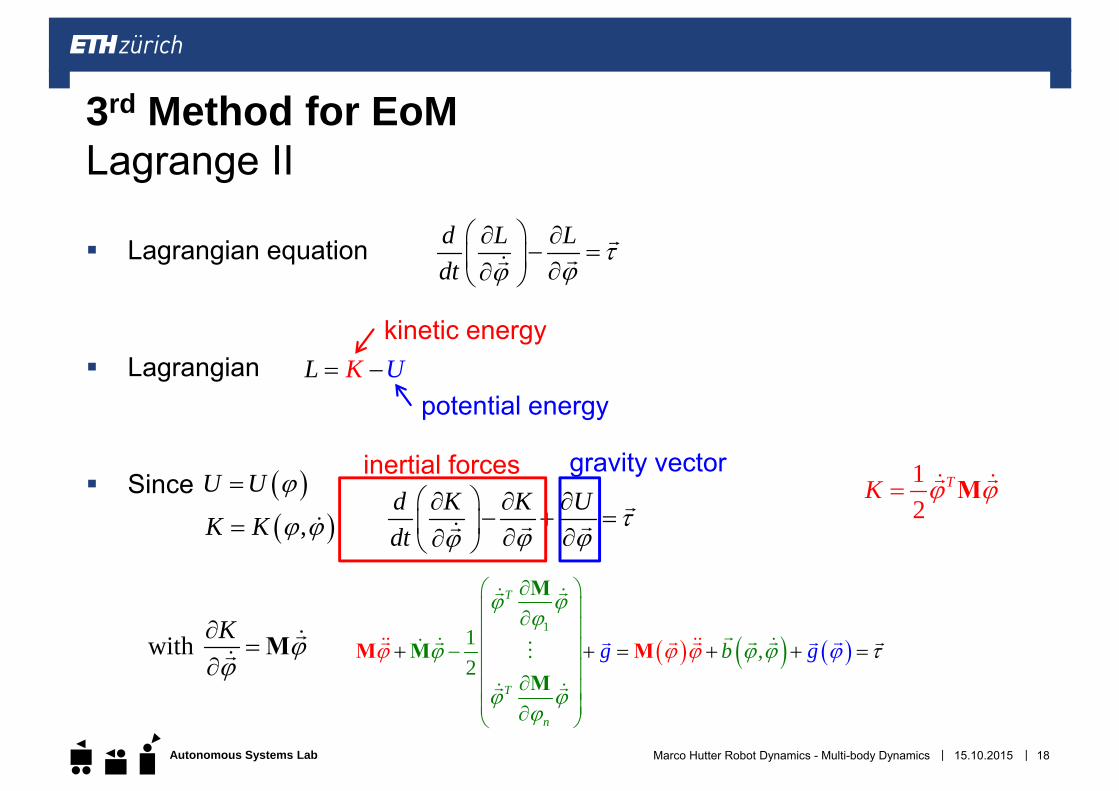
Lagrangian equation
Lagrangian
Since
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 18
3rd Method for EoMLagrange II
d L Ldt
d K K Udt
L UK kinetic energy
potential energy
inertial forces gravity vector 12
TK M
11 ,
2
T
T
n
g gb
M
MMMM
with K
M
,
U U
K K
||Autonomous Systems Lab
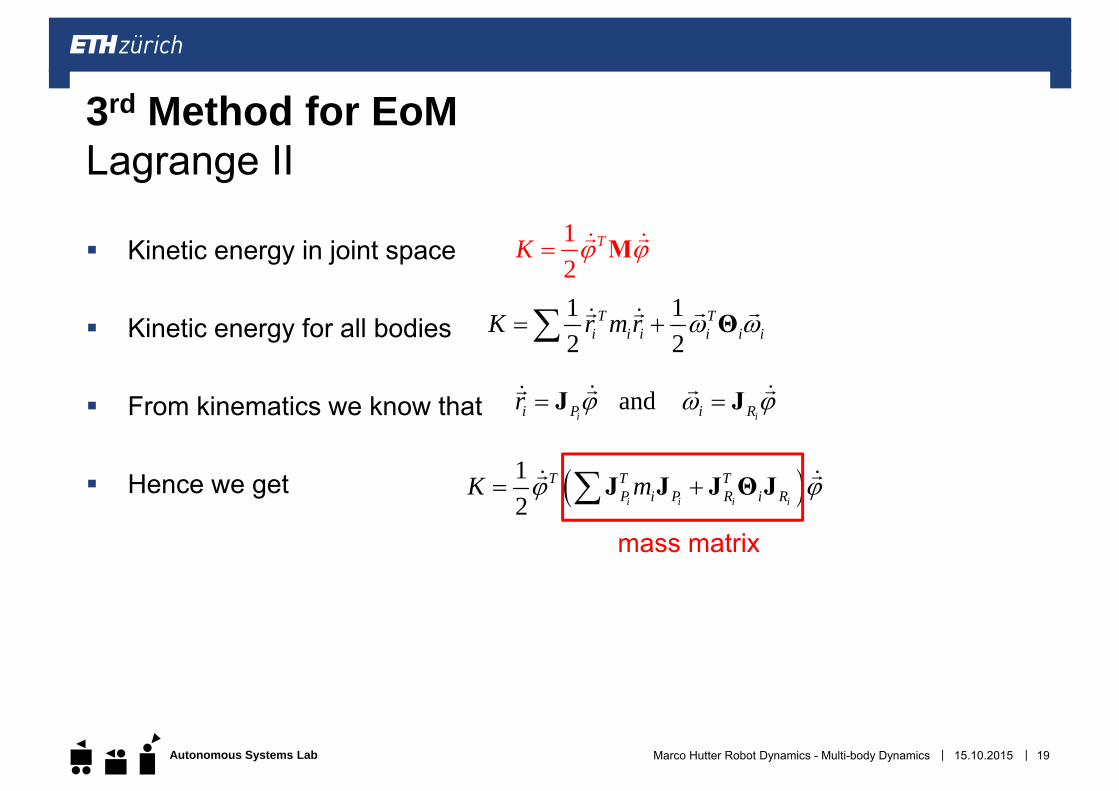
Kinetic energy in joint space
Kinetic energy for all bodies
From kinematics we know that
Hence we get
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 19
3rd Method for EoMLagrange II
12
TK M
1 12 2
T Ti i i i i iK r m r Θ
and i ii P i Rr J J
12 i i i i
T T TP i P R i RK m J J J Θ J
mass matrix
||Autonomous Systems Lab
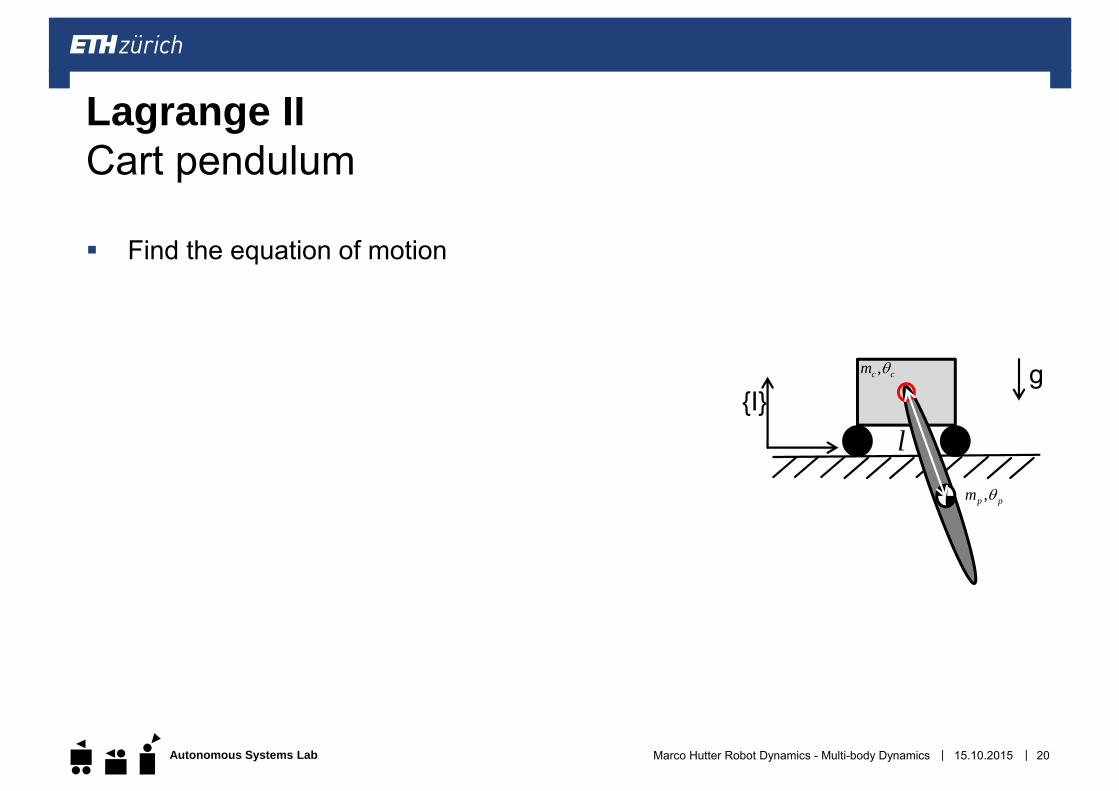
Find the equation of motion
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 20
Lagrange IICart pendulum
g
,p pm
,c cm
Il
||Autonomous Systems Lab
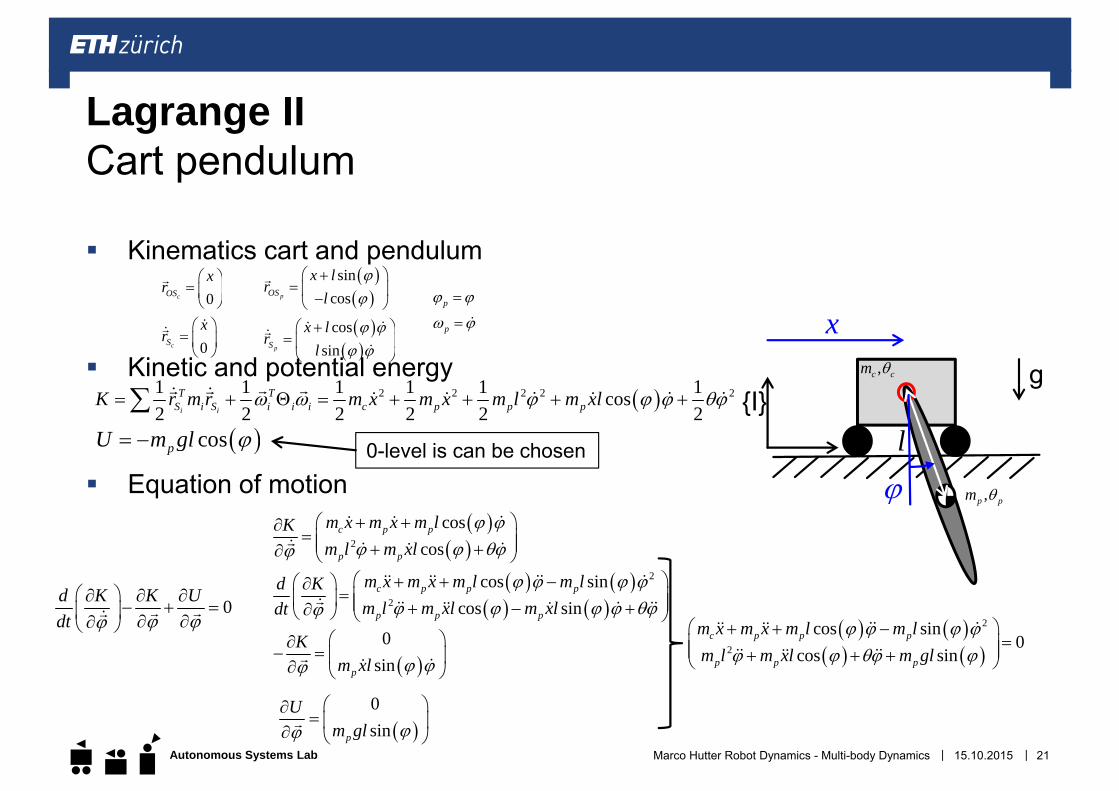
Kinematics cart and pendulum
Kinetic and potential energy
Equation of motion
15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 21
Lagrange IICart pendulum
0
0
c
c
OS
S
xr
xr
sincos
cossin
p
p
OS
S
x lr
l
x lr
l
p
p
2 2 2 2 21 1 1 1 1 1cos2 2 2 2 2 2i i
T TS i S i i i c p p pK r m r m x m x m l m xl
cospU m gl
0d K K Udt
2
coscos
c p p
p p
m x m x m lKm l m xl
2
2
cos sin0
cos sinc p p p
p p p
m x m x m l m lm l m xl m gl
g
,p pm
,c cm
I
x
l0-level is can be chosen
2
2
cos sincos sin
c p p p
p p p
m x m x m l m ld Km l m xl m xldt
0
sinp
Km xl
0sinp
Um gl
||Autonomous Systems Lab
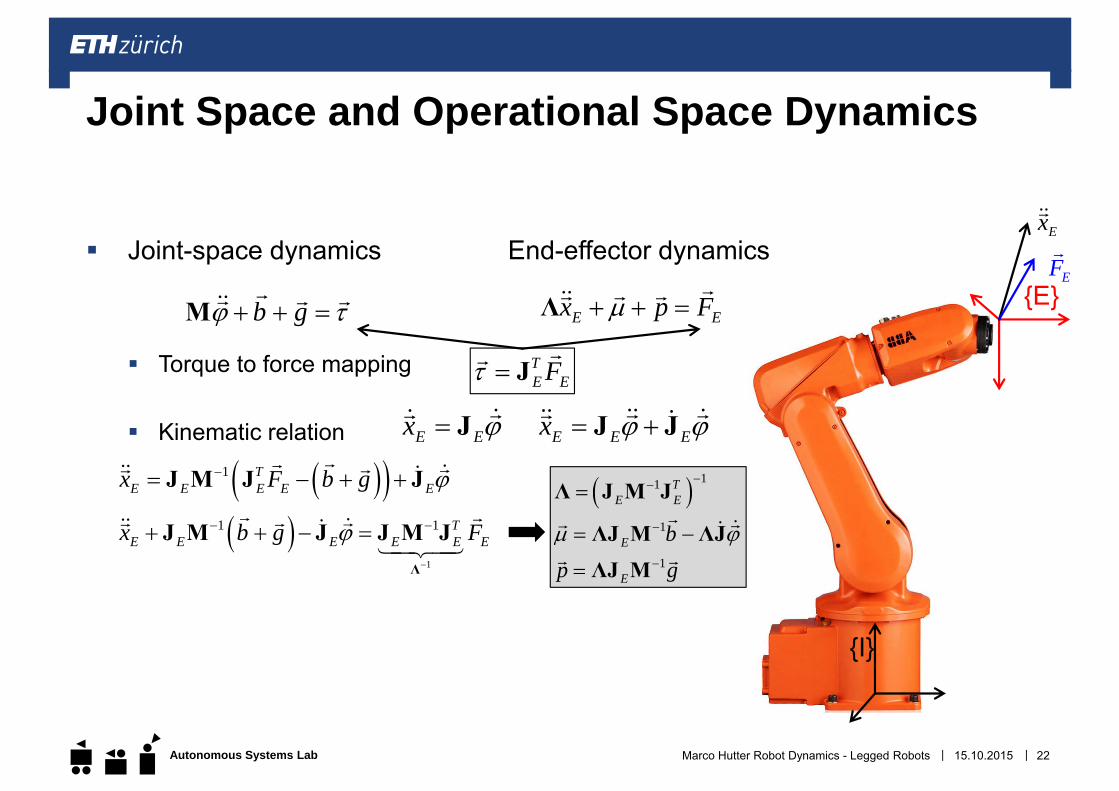
Joint-space dynamics End-effector dynamics
Torque to force mapping
Kinematic relation
15.10.2015Marco Hutter Robot Dynamics - Legged Robots 22
Joint Space and Operational Space Dynamics
I
EEF
Ex
b g M
1 TE E E E Ex F b g J M J J
E Ex p F Λ
E E Ex J J
TE EF J
1
1 1 TE E E E E Ex b g F
Λ
J M J J M J
11
1
1
TE E
E
E
b
p g
Λ J M J
ΛJ M ΛJ
ΛJ M
E Ex J
||Autonomous Systems Lab
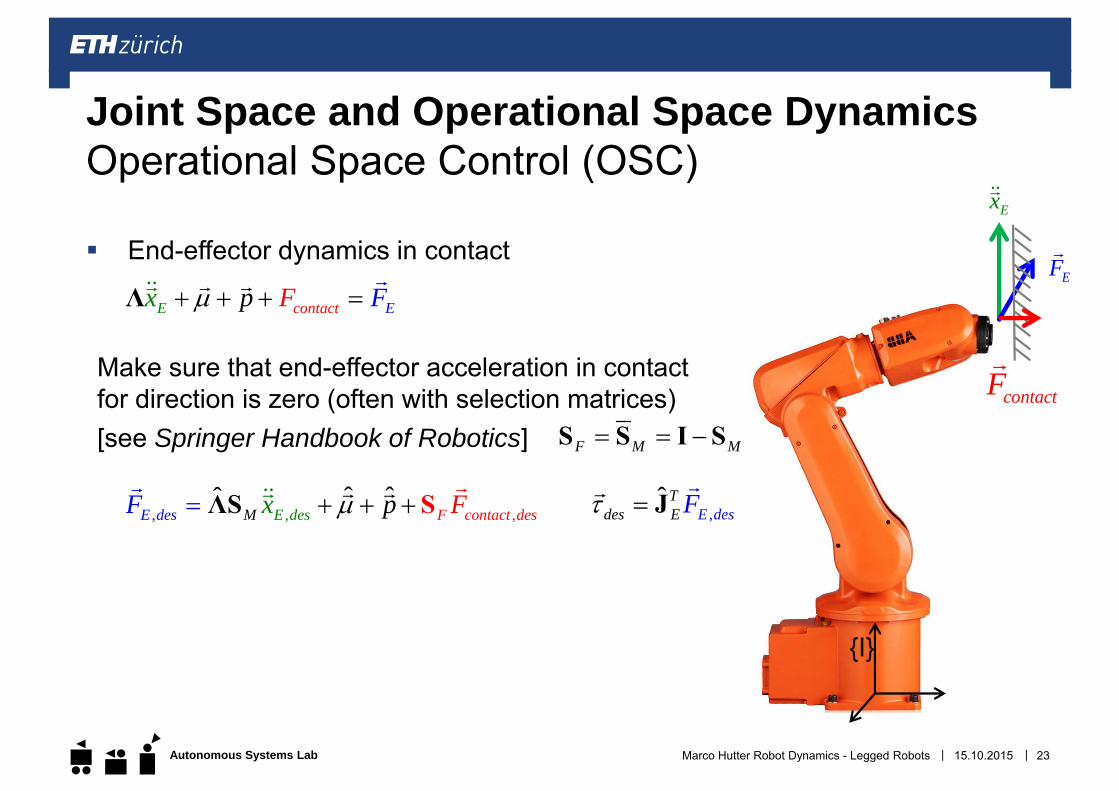
End-effector dynamics in contact
Make sure that end-effector acceleration in contactfor direction is zero (often with selection matrices)[see Springer Handbook of Robotics]
15.10.2015Marco Hutter Robot Dynamics - Legged Robots 23
Joint Space and Operational Space DynamicsOperational Space Control (OSC)
I
EF
Ex
contac EtE F Fx p Λ
,ˆ T
des E E desF J
contactF
F M M S S I S
, ,,ˆ ˆˆ
E deE s F cond tact des M esFF px SΛS
||Autonomous Systems Lab
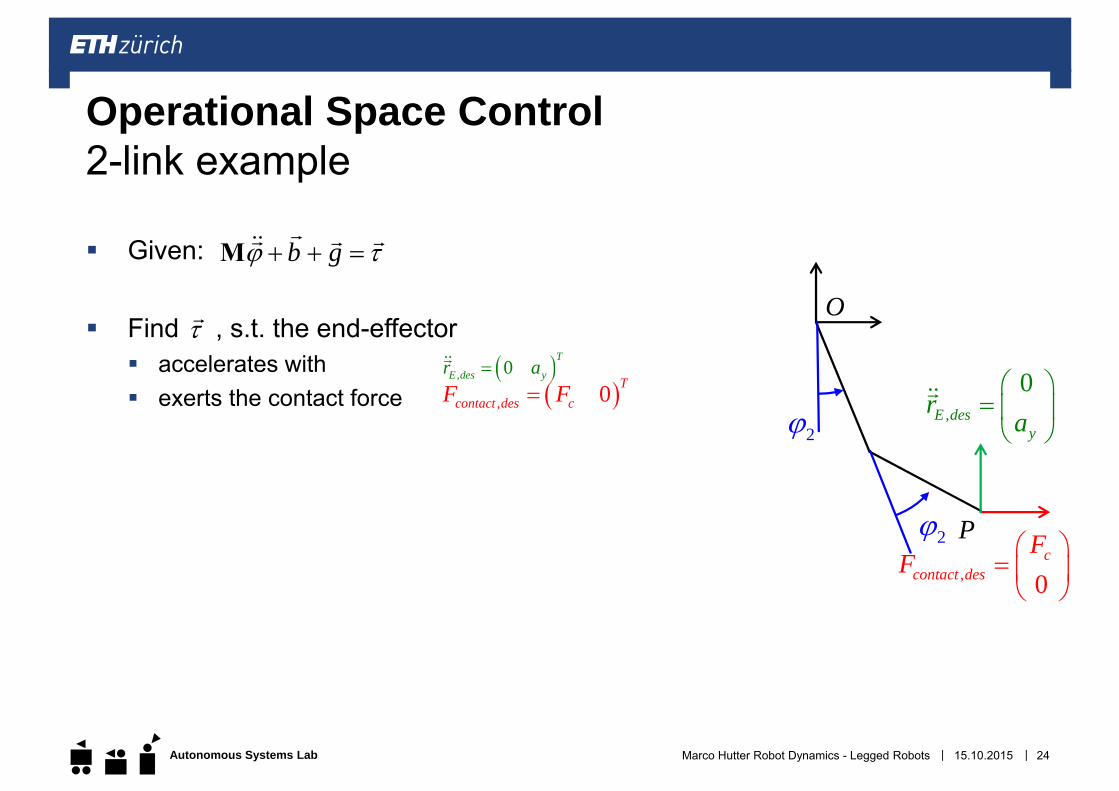
Given:
Find , s.t. the end-effector accelerates with exerts the contact force
24
Operational Space Control2-link example
, 0c
contact des
FF
2
2 P
O
b g M
, 0 Tcontact des cF F
, 0T
E des yr a
,
0E des
y
ra
15.10.2015Marco Hutter Robot Dynamics - Legged Robots
||Autonomous Systems Lab
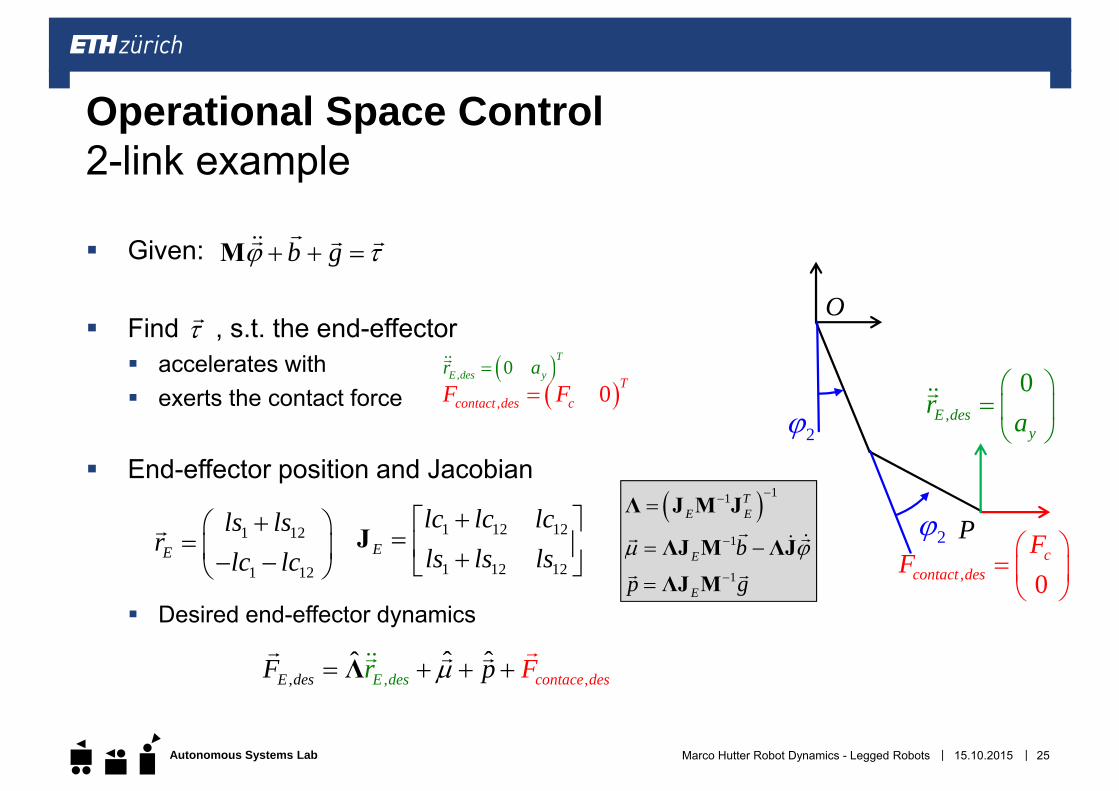
Given:
Find , s.t. the end-effector accelerates with exerts the contact force
End-effector position and Jacobian
Desired end-effector dynamics
25
Operational Space Control2-link example
, 0c
contact des
FF
,
0E des
y
ra
2
2 P
O
b g M
, 0T
E des yr a
, 0 Tcontact des cF F
1 12
1 12E
ls lsr
lc lc
1 12 12
1 12 12E
lc lc lcls ls ls
J 11
1
1
TE E
E
E
b
p g
Λ J M J
ΛJ M ΛJ
ΛJ M
,, ,ˆ ˆˆ
E des contE d ace ds se erF p F Λ
15.10.2015Marco Hutter Robot Dynamics - Legged Robots

||Autonomous Systems Lab 15.10.2015Marco Hutter Robot Dynamics - Multi-body Dynamics 26
Operational Space Control in Robotics
![Research Paper Molecular Imaging o f Immune Cell Dynamics ... · atlas of the C57BL/6J mouse brain was co-registered [23]. Volumes of interest (VOI) including the CC, HC, thalamus](https://img.pdfslide.us/doc/110x75/5f49edfbd009dc4dbe0d3b9e/research-paper-molecular-imaging-o-f-immune-cell-dynamics-atlas-of-the-c57bl6j.jpg)




























