Embed Size (px)
DESCRIPTION
R&D Attitude Control System in AADL. How will complexity and variation in embedded systems be captured? Can system-level design process benefit from system-level tools? AADL is applied to an R&D ESA AOCS concept. Introduction. Abstract - PowerPoint PPT Presentation
Citation preview

R&D Attitude Control System in AADL
• How will complexity and variation in embedded systems be captured?
• Can system-level design process benefit from system-level tools?
• AADL is applied to an R&D ESA AOCS concept
Software to Spec,Inc.Langebrug 2A2311 TK Leiden, Netherlandsph/fax: 011 31 71 532 1086email: [email protected]

Introduction
• Abstract • The advanced concept for an attitude control system proposed by ESA special projects group
proposes a hardware architecture that boasts improvements in power consumption, mass reduction and cost reduction. These improvements are achieved through adoption of new technologies such as SpaceWire, GPS electronics, Wireless I/F and the constituents of Satellite on a Chip (SOC). A software architecture supporting this attitude control system has been developed written in the Architecture Analysis Design Language (AADL). Preliminary tests results are shown for port connection checking and metrics are presented from the measurement of stream miss rates and flow
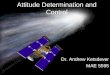
latency analysis. • Diagram of proposed R&D AOCS system
This AOCS system, presented by ESA at SDSW 2003, was modeled in AADL and the data flows mapped along 7 data paths through the control system. In this system, AOCS includes data flows to and from the payload system since future attitude control may interact with the payload. The results for the computed Latencies based on the data flows were independently verified.

Proposed ESA AOCS Design
5 M a y 2 0 0 3 S p a c e c r a f t D a t a S y s t e m s R o a d M a p
S p a c e c r a f t D a t a S y s t e m s W o r k s h o pS p a c e c r a f t D a t a S y s t e m s W o r k s h o p
P . D a v i d , E S A / T O S - E S D P a g e 3 0
D i s t r i b u t e dm a s s
m e m o r y
W i r e l e s s I / F
S O C
S c i e n c e p r o c e s s o r
P a y l o a dc o m p u t e r
P a y l o a dc o m p u t e rD i s t r i b u t e d
m a s s m e m o r y
S p a c e w i r er o u t i n g
T T & C G P S e l e c t r o n i c s S t a r t r a c k e r
p r o c e s s i n g C P U I / O ’ sA l l i s S O C
W i r e l e s s I / F
O b j e c t i v e s
C M G M a g n e t oT o r q u e r
M a g n e t om e t e r
P a y l o a d i n t e r f a c e
M i c r o i n e r t i a lm e a s u r e m e n t
u n i t
O n - O f f h a r n e s s
S e n s o r b u s
S p a c e w i r e
P o w e r c o n s u m p t i o n : f a c t o r 4 M a s s r e d u c t i o n : f a c t o r 8 C o s t r e d u c t i o n : f a c t o r 2
O n / O f f h a r n e s s
E l e c t r i cP r o p u l s i o n
u n i t
T h r u s t e r sD r i v e
u n i t
M i n iR T u n i t
P o w e rD i s t r i b u t i o n
u n i t
S o l a r a r r a yd r i v e
e l e c t r o n i c
H e a d S t a r
t r a c k e r S y s t e m b u s
S e n s o r b u s
P r i m a r y P o w e r
S e c o n d a r y P o w e r

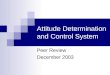
Results of Latency AnalysisData Flow
Latency [ms]
Star TrackerData to SOC
(256B)
SOC Data toControl
MomentumGyro (CMG)
(256B)
SOC Data toSolar Array
DriveElectronics
(SADE)(256B)
PayloadInstrument
Data to SOC(100KB)
SOC Data toPayload
MassMemory(100KB)
Tele-Command
Data via SOCto ElectricPropulsion
Unit(128b,1KB)
TelemetryData fromElectric
PropulsionUnit via SOC(256b,2KB)
Devices 5 5 5 5 100 100 50 50 5 5 131 131 141 141
RTU SensorBus HS-I2C
1 0 0 0 0 0 0 0 0 0 0 0 0 0
RTU SensorBus 1-Wire
0 14 0 0 0 0 0 0 0 0 0 0 0 0
RemoteTerminal Unit(RTU)
10 10 0 0 0 0 0 0 0 0 0 0 0 0
Sensor BusCAN
0 0 2 0 0 0 0 0 0 0 0 0 0 0
Sensor Bus1553-NG
0 0 0 1 0 0 0 0 0 0 0 0 0 0
System Bus1553_NG
1 0 0 0 1 0 0 0 0 0 2 0 4 0
System Bus1553
0 2 0 0 0 2 0 0 0 0 0 8 0 16
Network BusSpW
0 0 0 0 0 0 8 0 8 0 0 0 0 0
Router 0 0 0 0 0 0 10 10 10 10 0 0 0 0
Network BusIEEE 1394
0 0 0 0 0 0 0 2 0 2 0 0 0 0
Bus Adapter/Controller
10 10 10 10 10 10 10 10 10 10 10 10 10 10
InternalBus/Interrupt
1 1 1 1 1 1 1 1 1 1 2 2 2 2
SOC Process 1 1 1 1 1 1 1 1 1 1 1 1 1 1
SOC Thread 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ComputedTotals
30 44 20 19 114 115 81 75 36 30 147 153 159 171

Model Preparation
• Graphic model prepared w/ TNI OpenTool
• System coded in AADL with OSATE v1.0
• Data paths computed with Analysis Plug-in
• The following slides show the major system components

Model Preparation

Model Preparation

Model Preparation

Model Preparation

AADL Code Sample

Follow-on Work
• Work on this project continues with plans to update and embellish and the AOCS system model with new design content
• Advanced analysis plug-ins are planned for spacecraft bus architecture analysis
• The authors welcome input from ESA to elaborate the model
• Our contact information:Software to Spec,Inc.Langebrug 2A2311 TK Leiden, Netherlandsph/fax: 011 31 71 532 1086email: [email protected]