Embed Size (px)
DESCRIPTION
RAVE. Remote-Controlled Assault Vehicle Andy Knutsen Scott Helgeson Susan Jordan Johnny Lam Matt McBurney. Project Overview Rover Chassis Communications Turret System Main Board. Parts List Milestones Division of Labor Updated Calendar Conclusion. Overview. Project Overview. - PowerPoint PPT Presentation
Citation preview

RAVE
Remote-Controlled Assault VehicleAndy KnutsenScott HelgesonSusan JordanJohnny LamMatt McBurney

Overview
Project OverviewRover ChassisCommunicationsTurret SystemMain Board
Parts ListMilestonesDivision of LaborUpdated CalendarConclusion

Project Overview
Remote Controlled Assault VehicleControl Via RS-232 RF Wireless Transmitter/ Receiver
Java GUI InterfaceFull Turret and Vehicle ControlSemi-Automatic Firing Capability

Rover Chassis
Main Components:Steering servo motorDrive motor
Control signalsDrive motor is analogServo motor

Servo Control Signals

Communications Overview
User InterfaceSending InformationPacketsDevicesReceiving

User Interface
GUI Using Java swingJBuilderSeparate Rover from TurretEasy to useHave a drop box for amount of timeSize Limit

Sending Information
Send button is pressedGrab Command ListEncode using packetsJava Communications version 2.0 API

Packets
Consist of:Header
• Instructions about data
• Destination
Payload/Data/Body
• Padded
Trailer
Easy to modify

Packetspt. 2: Our Encoding
Header3 bitsStart BitDevice Select
Body7 bitsCommand SignalsDevice dependentPadded
Trailer2 bitsSignifies end of packet

Sequence DiagramUser uses GUI to send 2 commands to Rover
:RaveGui :RaveEncode :RaveComm
addCommand()
addCommand()
encodeRMovement()
getType()
encode()
send()
getType()
encodeTMovement()
<<DEVICE>>RS232
<<packet>>
User
sendCommand()

RS232 Devices
ATX8/ARX8-2400Wireless400 ft range418 MHz AM9 volt snap battery2400 baudOne-Way CommunicationPlug and Play
ARX8
ATX8
Receiving
ARX8-2400Treat as InterruptStore command list in memoryAllow for separate rover and turret movement.

Communication
BaselineAbove Baseline
Two way communication• CRC(Cyclic Redundancy Check)
More Robust CommandsUser Feedback

System Board Overview
Power, Reset and Communications CircuitMain System Board CircuitGlue Logic CircuitParts ListInterface Block Diagram

Power, Reset, and Comm. Circuitry

Main System Board

Glue Logic (FPGA) Circuitry

Parts ListQTY REQ.
UNIT OF MEASURE
DESCRIPTION MANUFACTURER NAMECOST PER
UNIT MEASURE
COST PER QTY
ACTUALCOST
1 EA M68HC11 Motorola $20.00 $20.00 $0.00
1 EA Xilinx FPGA Xilinx $12.00 $12.00 $0.00
1 EA Xilinx Socket Xilinx $20.00 $20.00 $0.00
1 EA Serial Port Socket AMP $12.00 $12.00 $0.00
1 EA RAM Texas Instruments $20.00 $20.00 $0.00
2 EA EPROM Texas Instruments $4.00 $8.00 $4.00
2 EA RF Transmitters Abacom Tech $40.00 $80.00 $80.00
1 EA IC Perf Board $20.00 $20.00 $20.00
1 EA 16-bit D/A Converter Texas Instruments $8.00 $8.00 $8.00
20 EA Decoupling Capacitors DigiKey $0.10 $2.00 $0.00
1 EA Clock in a Box (8MHz) Valpey-Fischer $2.00 $2.00 $0.00
1 EA Wires ece-capstone $5.00 $5.00 $0.00
1 EA Misc Switches, Power Strips JB Saunders $5.00 $5.00 $5.00
$214.00 $117.00TOTAL PROTOTYPE COST PER RAVE

Interface Block Diagram
MC68HC11 D/A
H-BridgeCircuits
TurretStepperMotors
Drive andSteeringMotors
RFReceiverRS-232
SolenoidFiringTrigger

Turret - Gun
Parts for the trigger box and turret will have to be machined

TurretQTY REQ.
UNIT OF MEASURE
DESCRIPTION MANUFACTURER NAMERec
COST PER UNIT
MEASURE
COST PER QTY
ACTUALCOST
1 EA Turret Gun Refab Generic O $52.00 $52.00 $52.00
1 EA Chassis Traxxas O $100.00 $100.00 $100.00
2 EA Stepper Motors Airpax O $10.00 $20.00 $20.00
1 EA Chassis Servo Motor(addl) Futaba O $15.00 $15.00 $15.00
1 EA Arming Solenoid Magnetic Sensing Systems O $16.00 $16.00 $16.00
1 EA Seriel RF TX/RX Abacom Tech O $40.00 $80.00 $80.00
1 EA 50 Count Hopper Generic $5.00 $5.00 $5.00
1 EA CO2 Cylinder Not to be sold with unit O $20.00 $20.00 $0.00
1 EA Battery/Charger Unk $50.00 $50.00 $50.00
1 EA Lazy Susan Turret Mount Generic O $9.00 $9.00 $9.00
1 EA Plexiglass build materials ece-capstone O $10.00 $10.00 $10.00
1 EA Misc parts Unk $12.00 $12.00 $12.00
$389.00 $391.00TOTAL PROTOTYPE COST PER RAVE
Stepper Motor Mechanics
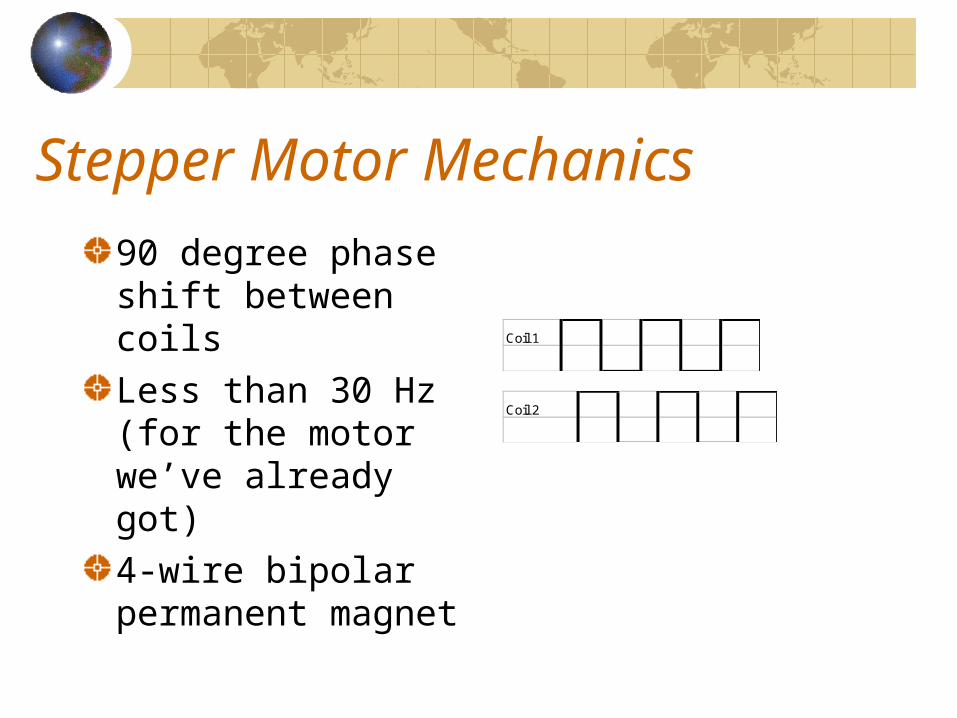
90 degree phase shift between coilsLess than 30 Hz (for the motor we’ve already got)4-wire bipolar permanent magnet
Coil 1
Coil 2

More on Steppers
Winding 1a 1000100010001000100010001Winding 1b 0010001000100010001000100Winding 2a 0100010001000100010001000Winding 2b 0001000100010001000100010 time --->
Winding 1a 1100110011001100110011001Winding 1b 0011001100110011001100110Winding 2a 0110011001100110011001100Winding 2b 1001100110011001100110011 time --->
Control Sequences

Milestones
Milestone 1Communication
• GUI Completed
Gun • Parts Machined
Turret• Motor Interface
Turret• Hardware
Assembled
Milestone 2Communication
• Packet Design and Encoding
Gun• Test Firing
Mechanism
Turret• Interface with
Board

Division of Labor
Main Board – Matt, JohnnyCommunications – Johnny, SusanChassis – Scott, Susan, AndyTurret – Susan, Scott, AndyUser Docs – AllTechnical Manual – All

Updated Calendar

Conclusion
On scheduleOver baseline possiblePrototype over budgetPossible design issues