Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 47, NO. 2, APRIL 1998 543
Random Error in Timing Using Weak Light Pulse,Photomultiplier, and Threshold Crossing Detection
Waldemar A. Kielek
Abstract—Expressions are reported which determine the ran-dom timing error resulting from random phenomena occurringduring time points marking with weak light pulses, received byphotomultiplier and detected by constant fraction and constantthreshold discriminators. Examples of applications are receiversfor laser-pulse, earth-to-satellite distance measuring instruments,and scintillation counters used in nuclear events timing. Resultsof calculations obtained from the formulas are in accordance withthe results coming from simulations.
Index Terms— Delay estimation, electromagnetic measure-ments, measurement errors, optical distance measurements,photomultipliers, pulse measurements, timing, timing circuits.
I. INTRODUCTION
PHOTOMULTIPLIERS, being almost noise-free amplifiersof weak light-pulse signals, are widely used for example
in devices measuring time intervals marked with weak or veryweak light pulses. In some applications of the photomultipliersthe light background is low due to work during the night orwith small bandwidth filtering. Devices mentioned are, forexample, laser pulse distance measuring instruments that mea-sure the distances to the earth satellites, scintillation countersused for timing of the nuclear events, or optoelectronic-pulsedistance meters used on the ground or in space under night-time conditions. Range of the energy of light pulses receivedin these devices is from one photon to many thousands ofphotons. In this range, granularity of the emission of freephotoelectrons at the photocathode, fluctuations in the delay ofbunches of electrons in the electron multiplier, and fluctuationsof the gains at the dynodes (discrete or distributed) of themultiplier make the error in timing. This error is dependenton the signal energy and usually has systematic as well asrandom component. Both components can be decreased byusing suitable devices to estimate the positions of timing pointsafter the passage of the signal through the photomultiplier.
Even though this subject has been dealt with in priorpublications, the influence of the method of estimation ofthe timing points on the timing error is not clear enoughuntil now. In particular, the problem of random error intiming is insufficiently explained for so called constant fractiondiscriminators, estimating devices still widely used in practice.Previous results [1], [2] are limited to Gaussian light-signalpulse and the circuit of Fig. 1 only. Additionally results in [1]are limited to a fraction (the parameter mentioned later) value
Manuscript received October 24, 1994; revised December 4, 1998.The author is with the Institute of Radioelectronics, Warsaw University of
Technology, Warsaw, Poland.Publisher Item Identifier S 0018-9456(98)09859-3.
Fig. 1. Scheme of the constant-fraction (c.f.) discriminator.
of 0.5. Results in [2] are valid for the case of no filtrationonly. The author has elaborated some analytic expressionsconcerning the general case. The main aim of this paper is thepresentation of these expressions, some results of calculationsfrom them, and comparisons of these results with the results ofsimulations and, to a limited extent, also with the experimentalresults.
II. A SSUMED MODEL OF STOCHASTIC PHENOMENA
For many estimation methods used in timing the sameanalytic approach given below can be used. Multiplication ofelectrons in dynode (discrete in ordinary, or distributed in mi-crochannel plate) electron multipliers can be described exactlyby random branching processes [3]–[5]. The photomultiplier(PMT) output signal is the sum of bunches of the electrons,each bunch triggered by a photoelectron generated at thephotocathode due to arrival of the pulse of the electromagneticfield having the shape . With minor approximation only,it can be assumed [3], [4], [6] that the pulse signal ofelectric current received at the PMT output can be modeledas the time-dependent nonhomogeneous filtered stochasticPoisson point process. The random weights of points representthe randomness of charge amplification for each individualphotoelectron collected by the first dynode of the electronmultiplier [4], [5]. Single realization of this process has theform of shot noise of the amplified photoelectrons at the PMToutput. It is the sum of single photoelectron pulses, randomlyamplified by , occurring at whiles at the photocathode,and randomly delayed by times of flights inside the PMT
(1)
Here is the process mentioned, normalized to the meanPMT gain. is the random Poisson number of photoelec-trons (phe) realized for each individual light pulse received.
0018–9456/98$10.00 1998 IEEE

544 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 47, NO. 2, APRIL 1998
are the random variables: normalized to the meanvalue PMT gain, times of phe emissions at the photocathode,and delay in the PMT, respectively. is the fullydetermined shape of a single phe response at the PMT output.
The PMT as such stochastic filter is treated in [4] and[5]. Calculations ([7, p. 199], [4, p. 254]) and experimentalobservations [e.g., author’s for moderately fast (few nanosec-onds) PMT’s as RCA 8852, and Russian FEU 77, 79, 84, 87]indicate that the assumption about the shape stabilityis reasonable. The above PMT model is very well establishedfor pulse-light communications and measurements [6], [8], [9]and also in the timing of nuclear events [4], [5], [7], [10].
For the processes of that type the formulas for expectation,covariance, and variance were first given by Parzen ([11, p.156]). Independently, using different methods, these formulaswere also obtained by Snyder ([12, pp. 171, 172]), and Sharma[8]
(2)
(3)
(4)
Here is the expectation of is thestochastic (in value only, and not in shape) single phe responseof PMT, , where is the stochasticnormalized PMT gain. In the absence of additive noise,is the probability density function (pdf) of arrivals of electronmultiplier amplified single photoelectron pulses at the PMToutput. Then, must be the convolution of the light-pulseshape with the pdf of the delay process in the whole PMT.Integration limits in (2)–(4) are chosen in the manner tocontain all nonzero values of respective products.
Various methods of estimating the delay were investigatedby the author. These include: 1) Finding the time needed tocross a fixed threshold, or a threshold proportional to themaximum value of the PMT output current or charge; 2)using the Gedcke–McDonald “constant fraction” discriminator[13] for current or charge; and 3) using the short-circuit delayline shaping and a zero-crossing discriminator. It was foundthat the variance of value of the process of importance at thedecision point for the method used is the linear combinationof variances and covariances [(3) and (4)]. Then, the varianceis proportional to , the mean number of photoelectronsin the signal , due to the existence of in (3) and(4). The variance is also proportional to, the mean squareof the normalized to mean value photodetector gain becauseof the existence of or in (3)and (4) which gives . The decision in thediscrimination process is undertaken depending on the valueof some stochastic process, which is, for all methodsmentioned above, of the type of a linear combination of thevalues of a process of the type (1), usually shifted in timein a known manner. For sufficiently high , it is possibleto linearize the transition from variance of the value of the
process at the decision point to the decision time pointvariance, dividing it by the square of the slope of theprocessexpectation in the vicinity of decision time point [3], [4]. Thatslope is proportional to and independent of . Then, onecan obtain for the normalized standard deviation of the errorthe expression given below, valid for all processing methodsmentioned and all continuous shapes of the pulses
(5)
Here is the error. is the normalization coefficient fortime, for instance, the -parameter of the Gaussian equivalent(convolved with pdf of the delay in the PMT) light pulse, orhalf of the width of an other pulse shape.is the coefficient,dependent on the method used, its parameters, shape ofand shape and width of .
Equation (5), because of the approximated transition fromthe process value variance to the time variance, is valid fora large enough number of phe. The author’s simulationsprove that minimal depends on the shape of , shape,and width of , decreasing with the increase of thiswidth (see, e.g., Fig. 3), and, in much smaller extent, on thevalue of fraction .
III. CONSTANT-FRACTION PULSE-HEIGHT
DISCRIMINATION FOR CURRENT
Constant-fraction discrimination for current or voltageacross a resistance can be obtained, for example, in the circuitpresented in Fig. 1. For a completely determined shape of theinput pulse to a discriminator and absence of discriminatorinertia, changes of the peak value of the pulse do not affectthe timing point. Randomness of the timing of phe emission,delays, and gains in the multiplier produce a random error intiming. The input signal, as well as threshold itself, are thesame stochastic process discussed above but shifted in relationto each other. They are partially correlated in the thresholdcrossing point. The covariance value increases when the widthof pulse increases. A high covariance value decreasesthe error by decreasing the variance of the difference of theinput signal and threshold processes. That difference is herethe process mentioned.
Assuming the absence of additive noise, normalizingand so that their areas are equal to the unity and usingthe expressions (2)–(4) and linearization of the transition fromthe value of the process variance to the timing point variance,an expression for random timing error can be obtained in theshape of
(6)
Here is the fraction, quotient of the threshold value, andthe signal top value in its individual realization. ,

KIELEK: RANDOM ERROR IN TIMING USING WEAK LIGHT PULSE 545
are the points of time of reaching the fraction or top value,respectively, of the convolution of the equivalent light-pulse
with the single-phe response . is the coefficientin (5) mentioned before. is the convolution operator. Theother denotations are as before.
Assuming that the and the are in the shape ofGaussian pulses of the parameters and ,respectively, after some manipulations the expression for the
coefficient of (5) can be obtained as below
(7)
where is the normalized filtration parameter ,the rest as before. The pdf of the PMT delay jitter wasassumed as the Gaussian pulse also and was included in the
parameter of the signal shape.The results of calculations from (7) are given in Fig. 2 as
versus the fraction and the filtration , which is theother normalized filtration parameter.is equal to the quotientof the pulse width and the -parameter of thepulse, . The resultsof simulations following strictly the signal model of (1) andapplying appropriate pdfs are also included. The coefficient
, opposite to “common sense” thinking, decreases when thefiltration is increased, approaching the value one. This valueis characteristic for the use of the optimal estimators. But forthe pulses with small normalized rise-times (non-Gaussianin shape), the increases when the parameter is increased[the author’s results from (6) and the simulations]. For allnon-Gaussian pulse shapes, theparameter is defined as thequotient of the pulse width and half of the pulsewidth.
In order to examine the behavior of the coefficientvalueat small values of energy, simulation examinations were made,creating the random signal according to (1) with the requirednumber of phe . For the conditions as for (7), the values of
obtained from simulations are given in Fig. 2 versus thefraction and filtration values, when in Fig. 3 versus thesignal energy and filtration . The coefficient for smallvalues of signal energy increases with the energy, reaching thevalues in good accordance with (7) for the values higherthan approximately . The shape of change of thevalue versus energy for other fraction values is the sameas in Fig. 3. For very small signal energies, of the order ofa few phe, absence of greater influence of the filtrationon the random error was obtained, independently of the risetime of the pulse. That influence disappears completelyof course for the single-phe signals. In Figs. 2 and 3, there arealso some points obtained experimentally in the laboratory forfew ns region of the width. The signal energy, measuredin phe numbers , was estimated by dividing the charge ofthe in any realization by the average charge of the single-phe pulse. Remarkable accordance with the analytical and/orsimulation results is apparent.
Fig. 2. g1 coefficient of (5) indicated asg1 � 1 for the c.f. of currentmethod, calculated from (7) and obtained by simulations, versus filtrationF and fractionf . Points connected by dashed lines are from simulations.
IV. “C ONSTANT-FRACTION” PULSE-HEIGHT
DISCRIMINATION FOR CURRENT COMMONLY
USED IN COMMERCIAL DISCRIMINATORS
Constant-fraction discriminators used contemporarily havebeen elaborated from 1967 [13] mainly for the use in thescintillation counters. They work usually in one of the schemesin Fig. 4, and rarely in Fig. 1, due to the need to obtain smalldead time. In the both schemes in Fig. 4 the input signal isdivided between two paths and combined to obtain the inputsignal for the zero-crossing detector or comparator in theform . Here is the attenuation inthe one path, is the delay in the second path. The timingpoint occurs as the jump in the discriminator output voltage,when the crosses the value zero. If the delay of delay-linein Fig. 4 is equal to the time distance from the fraction to thetop of the fully determined input pulse to the discriminator,the system works similarly like the system in Fig. 1. For asufficiently large filtration and phe number , in the caseof the stochastic input signal, the random error in timing is

546 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 47, NO. 2, APRIL 1998
Fig. 3. g1 coefficient of (5) for c.f. of current versus filtrationF and energyin pheK from simulations. Separated points are experimental (averaged).
described by (6) and (7). In the case when the delay of delay-line in Fig. 4 is freely chosen, (6) and (7) are replaced by (8)and (9), respectively. For the arbitrary shapes of the and
pulses one obtains
(8)
Here is the point of time, for which, with time increasing,one obtainswhere is the attenuation in the first path in Fig. 4, the restas before. The fraction value realized here is dependent not onthe coefficient only, but also on the delay .
For the Gaussian and pulses, after lengthy butstraightforward manipulations one obtains
(9)
Fig. 4. Schemes of the c.f. discriminators commonly used in commercialinstruments.
where , -delay of delay-line in Fig. 4,, and , the
rest of denotations and PMT delay jitter included as before for(7). In (9) besides the “fraction” and filtration , normalizeddelay of the delay-line in Fig. 4 occurs as a parameter.
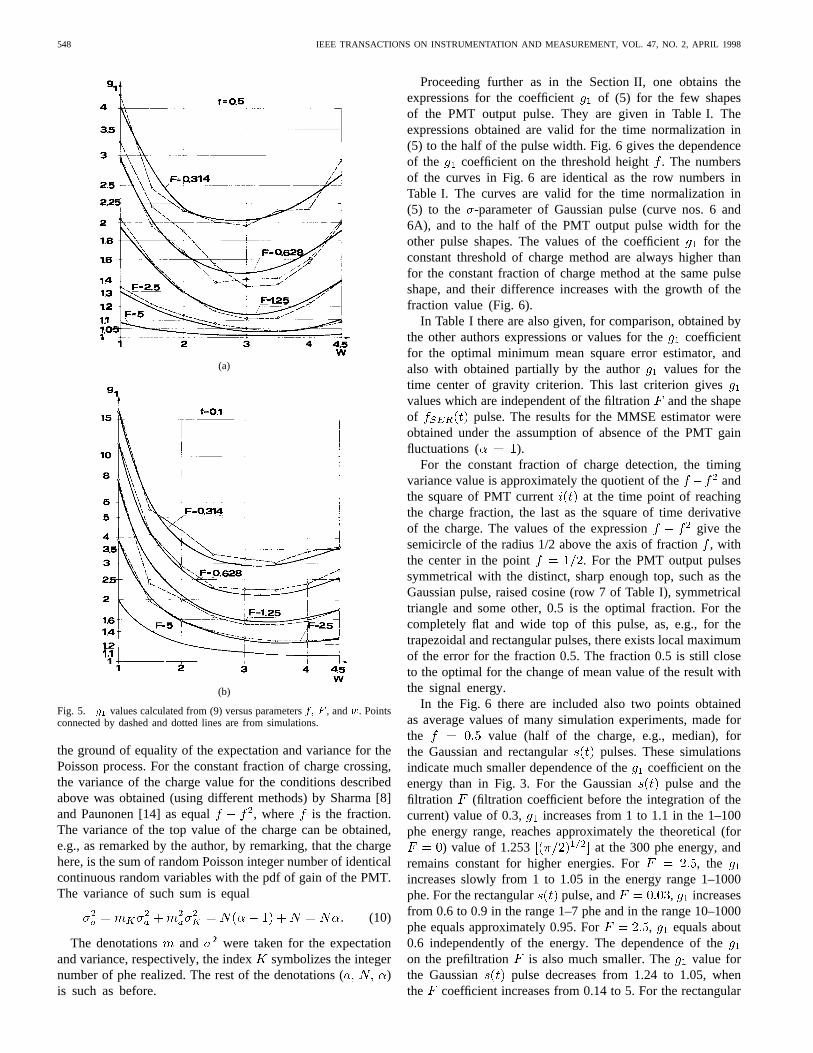
In Fig. 5 one can see values of the coefficientcalculatedfrom (9), versus the parameters: “fraction”, filtration , anddelay , together with the simulation results. As it appears,the optimal values of the delay are, in general, higher thanthe “constant fraction” values. These values arethe delays from the fraction to the top of the expectationsof the pulses at the PMT output. They give the identity ofwork of the circuits in Figs. 1 and 4 for the fully determinedinput pulse shape. The similarity of the work of the circuitson Figs. 1 and 4 is preserved when the shape of the inputpulse of the discriminator does not differ a lot from the fullydetermined pulse shape. It occurs for sufficiently high valuesof the filtration and energy , when the single-phe pulsesare piled up, standing one on the other. For small values of thefiltration , the work of these systems is completely different,especially when their input signal is the group of separatesingle-phe pulses, or when before the front of the main signalpulse, separate single-phe pulses occur. In such cases the workof circuits in Fig. 4 has nothing in common with the constant-fraction criterion, while in the system on Fig. 1 this criterionis still preserved. Unlimited in time Gaussian light pulse hasgot before its main part the range of small intensity radiation.In this case creation of single, separated photoelectrons beforethe main part of the output signal of PMT may occur. Thus,especially for small filtration and small delay used, thediscriminator in Fig. 4 may operate from such single phe, andnot from the main part of the signal, giving some forwardjump of the time moment of its operation. In (7) and (9)the possibility of jumps mentioned is not taken into account.The simulations indicate, that the range of parameters usedin Fig. 5 is practically free from the jumps mentioned, and

KIELEK: RANDOM ERROR IN TIMING USING WEAK LIGHT PULSE 547
TABLE ICOEFFICIENT g1 OF (5) VERSUS THRESHOLD HEIGHT F FOR THE CONSTANT-FRACTION OF CHARGE AND CONSTANT CHARGE THRESHOLD
CROSSINGMETHODS, WITHOUT PREFILTRATION F . VALUES FOR TIME CENTER OF GRAVITY AND OPTIMAL ESTIMATIONS ARE ALSO GIVEN
(7) and (9) are valid even for very high charge sensitivityof zero crossing detector in Fig. 4, when the Gaussianand pulses are limited in time at their bases toand , respectively, with the exception of the region,in which simultaneously appear , and theenergy phe. That absence of the jumps occurs asa result of their low probability. In the exceptional regionmentioned above the jumps are eliminated when the minimalcharge giving the proper work of the zero crossing detector isequal to 1 phe or more. Higher values of the parameters,and the minimal charge parameter mentioned above help toeliminate the jumps. There were no simulations for the energyabove 1000 phe. The dependence of thecoefficient on theenergy is similar as in Fig. 3.
The simulations were made for the case of the circuitsin Figs. 1 and 4 for the Gaussian, rectangular, trapezoidal,exponentially falling, and -typepulses. The influence of the normalized rise-time of thepulse was investigated using this last pulse shape. Decrease ofthe rise-time reduces the, especially for small values of thefiltration . For small values of the quotient , decrease ofthe gives the decrease of the. For higher values of the
, increase of the gives the decrease of the. There isalso the intermediate region of the , where the has no
influence on the . For the zero or very small rise-time andfiltration , fraction below 0.3, and energy greater than 10phe, the energy dependence of the random error is of a type,instead of (5), approximately . For such shapes andoptimum estimators, theoretical and obtained by simulationsdependence is (see Table I) and , respectively. Forthe signals without pedestal of the low radiance, the jumpeffect mentioned does not occur. It is true also for the clippedas above Gaussian pulse, the circuit in Fig. 1, and the fractionvalues above 0.1, if occurring simultaneously.
V. CONSTANT-FRACTION AND FIXED-THRESHOLD
PULSE-HEIGHT DISCRIMINATION FOR CHARGE
On the ground of arguments given in Section II, (5) is validalso for the cases when the constant-fraction or fixed-thresholdcriteria for the charge are applied. An implementation ofsuch criteria is possible by the use of, e.g., constant-fractionschemes from Figs. 1 or 4, or comparison with the fixedthreshold, respectively, for the integrated pulse of the current.
For the case of absence of a filtration before the integration,and the constant threshold of the charge, understood here asa quotient of the threshold value and the expectation value ofthe full charge of received pulse, the normalized variance ofthe charge at the threshold crossing point is. This appears on
548 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 47, NO. 2, APRIL 1998
(a)
(b)
Fig. 5. g1 values calculated from (9) versus parametersf; F , andw. Pointsconnected by dashed and dotted lines are from simulations.
the ground of equality of the expectation and variance for thePoisson process. For the constant fraction of charge crossing,the variance of the charge value for the conditions describedabove was obtained (using different methods) by Sharma [8]and Paunonen [14] as equal , where is the fraction.The variance of the top value of the charge can be obtained,e.g., as remarked by the author, by remarking, that the chargehere, is the sum of random Poisson integer number of identicalcontinuous random variables with the pdf of gain of the PMT.The variance of such sum is equal
(10)
The denotations and were taken for the expectationand variance, respectively, the indexsymbolizes the integernumber of phe realized. The rest of the denotations ( )is such as before.
Proceeding further as in the Section II, one obtains theexpressions for the coefficient of (5) for the few shapesof the PMT output pulse. They are given in Table I. Theexpressions obtained are valid for the time normalization in(5) to the half of the pulse width. Fig. 6 gives the dependenceof the coefficient on the threshold height. The numbersof the curves in Fig. 6 are identical as the row numbers inTable I. The curves are valid for the time normalization in(5) to the -parameter of Gaussian pulse (curve nos. 6 and6A), and to the half of the PMT output pulse width for theother pulse shapes. The values of the coefficientfor theconstant threshold of charge method are always higher thanfor the constant fraction of charge method at the same pulseshape, and their difference increases with the growth of thefraction value (Fig. 6).
In Table I there are also given, for comparison, obtained bythe other authors expressions or values for thecoefficientfor the optimal minimum mean square error estimator, andalso with obtained partially by the author values for thetime center of gravity criterion. This last criterion givesvalues which are independent of the filtrationand the shapeof pulse. The results for the MMSE estimator wereobtained under the assumption of absence of the PMT gainfluctuations ( ).
For the constant fraction of charge detection, the timingvariance value is approximately the quotient of the andthe square of PMT current at the time point of reachingthe charge fraction, the last as the square of time derivativeof the charge. The values of the expression give thesemicircle of the radius 1/2 above the axis of fraction, withthe center in the point . For the PMT output pulsessymmetrical with the distinct, sharp enough top, such as theGaussian pulse, raised cosine (row 7 of Table I), symmetricaltriangle and some other, 0.5 is the optimal fraction. For thecompletely flat and wide top of this pulse, as, e.g., for thetrapezoidal and rectangular pulses, there exists local maximumof the error for the fraction 0.5. The fraction 0.5 is still closeto the optimal for the change of mean value of the result withthe signal energy.
In the Fig. 6 there are included also two points obtainedas average values of many simulation experiments, made forthe value (half of the charge, e.g., median), forthe Gaussian and rectangular pulses. These simulationsindicate much smaller dependence of thecoefficient on theenergy than in Fig. 3. For the Gaussian pulse and thefiltration (filtration coefficient before the integration of thecurrent) value of 0.3, increases from 1 to 1.1 in the 1–100phe energy range, reaches approximately the theoretical (for
) value of 1.253 at the 300 phe energy, andremains constant for higher energies. For , theincreases slowly from 1 to 1.05 in the energy range 1–1000phe. For the rectangular pulse, and , increasesfrom 0.6 to 0.9 in the range 1–7 phe and in the range 10–1000phe equals approximately 0.95. For , equals about0.6 independently of the energy. The dependence of theon the prefiltration is also much smaller. The value forthe Gaussian pulse decreases from 1.24 to 1.05, whenthe coefficient increases from 0.14 to 5. For the rectangular

KIELEK: RANDOM ERROR IN TIMING USING WEAK LIGHT PULSE 549
(a)
(b)
Fig. 6. g1 values calculated from the expressions in Table I for the c.f. and fixed threshold of charge versus the fraction and input pulse shape. Numbersof shapes as in Table I, “A” denotations for constant-fraction. The normalization of error to the� parameter for Gaussian pulse (shape no. 6) and tothe half of width of the pulse for rest.
signal pulse, the decreases from 0.88 to 0.56 when thecoefficient increases from 0.1 to 3. The dependence of the
systematic error on the energy for the criterion of the median isvery small, nearly zero. For the time center of gravity criterionthat dependence does not exist.
VI. DETECTION OF TIME WHILE OF CROSSING
OF FIXED THRESHOLD FORCURRENT
Following the procedure described in Section II for thedetection of the while of crossing of the fixed threshold ofthe current or voltage across a resistance, one obtains theexpression valid for Gaussian and pulses and
the conditions as for (7), given below
(11)Here the parameter is defined as for (7), and the parameter
is the quotient of the threshold value and the top of thevalue of the expectation of the PMT output current process.The results of the calculations from (11) are given in Fig. 7using the filtration parameter defined as before for Figs. 2, 3,and 5. The dependence of thecoefficient on the parameters
and is completely different than on Fig. 2. The randomtiming error is higher than for the constant-fraction method.This conclusion is confirmed by the practice.

550 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 47, NO. 2, APRIL 1998
Fig. 7. g1 values calculated from (11) for the fixed threshold of currentdiscrimination and Gaussian input pulse.
VII. CONCLUSION
The expressions were given for the random error dueto stochastic phenomena in the receivers of the laser-pulsedistance measuring instruments and the scintillation countersusing photomultipliers and threshold crossing detection for thecase of small background. Some of them, as (5), (6), and (8),are general, independent of the pulse shapes of interest. Theother formulas, as (7), (9), and (11), are valid for light-signal,probability density function of the delay in photomultiplier,and its single-photoelectron response in the form of Gaussianpulses. Some problems when using pulses not limited in timeare explained in Section IV. The approximate formulas for theerror in the case of the constant fraction and the fixed thresholdof charge methods for few light signal shapes are given inTable I. The simulation results, obtained for the trapezoidal,rectangular, exponential, Gaussian and some other shapes ofthe photomultiplier output pulses, are described here onlypartially. The accordance between the simulation results andthe calculated values is good. The analytical and the simulationresults indicate, that, in some cases, when the filtration andfraction parameters are chosen properly, the random timingerror can be as small as for the use of the optimal estimators.
The results are important for the practice by the following.1) The fraction value can be chosen to obtain small
random timing error for the circuits in Figs. 1 and 4.2) The same appears for the delay in the circuit on
Fig. 4.3) For the Gaussian-like pulses, an auxiliary electric filter
between the PMT and the discriminator can, in somecases, improve the accuracy.
In the author’s opinion, there is the possibility to improvesome existing instruments, when using the ideas mentioned inthis paper.
REFERENCES
[1] O. Ojanen, “On the analysis of the return pulse of the satellite laser,”Rep. Finnish Geodetic Inst., Helsinki, vol. 79, no. 1, 1979.
[2] A. B. Sharma and S. J. Halme, “Timing errors due to fixed threshold,constant fraction and median detection of laser echoes,”IEEE Trans.Instrum. Meas.,vol. IM-30, pp. 3–7, 1981.
[3] R. Euling, “Statistics of time in photomultiplication,”J. Appl. Phys.,vol. 35, pp. 1391–1403, 1964.
[4] E. Gatti and V. Svelto, “Review of theories and experiments of resolvingtime with scintillation counters,”Nucl. Instrum. Methods,vol. 43, pp.248–267, 1966.
[5] S. Donati, E. Gatti, and V. Svelto, “An equivalent circuit for thestatistical behavior of the scintillation counter,”Nucl. Instrum. Methods.,vol. 46, pp. 165–170, 1967.
[6] E. V. Hoverstenet al., “Direct-detection optical communication re-ceivers,” IEEE Trans. Commun.,vol. COMM-22, pp. 17–24, 1974.
[7] E. Gatti and V. Svelto, “Theory of time resolution in scintillationcounters,”Nucl. Instrum. Methods,vol. 4, pp. 189–201, 1959.
[8] A. B. Sharma, “Experimental performance of the Metsahovi laser radarreceiver,” Rep. Finnish Geodetic Inst., Helsinki, vol. 77, no. 1, 1977.
[9] , “A theoretical analysis of optical receivers used in satel-lite ranging,” Rep. Finnish Geodetic Inst., Helsinki, vol. 76, no. 3,1976.
[10] M. Cocchi and A. Rota, “Some remarks on the scintillator-PM systemanalysis for timing,” Nucl. Instrum. Methods,vol. 55, pp. 365–371,1967.
[11] E. Parzen,Stochastic Processes.San Francisco: Holden-Day, 1962.[12] D. L. Snyder,Random Point Processes.New York: Wiley, 1975.[13] D. A. Gedcke and W. J. McDonald, “A constant fraction of pulse height
trigger for optimum time resolution,”Nucl. Instrim. Methods,vol. 55,pp. 377–380, 1967.
[14] M. Paunonen, “Studies on the Metsahovi satellite laser ranging system,”Rep. Finnish Geodetic Inst., Helsinki, vol. 82, no. 2, 1982.
[15] I. Bar-David, “Minimum-mean-square-error estimation of photon pulsedelay,” IEEE Trans. Inform. Theory,vol. IT-21, pp. 326–330, 1975.
[16] W. Kielek, Influence of Processing Multiphotoelectron Reflected Signalon the Accuracy of the Laser Pulse Range to Satellites Meters.Warsaw,Poland: Wydawnictwa Politechniki Warszawskiej, 1988 (in Polish).
[17] I. Bar-David, “Communication under the Poisson regime,”IEEE Trans.Inform. Theory,vol. IT-15, pp. 31–37, 1969.
[18] G. Lee and G. Schroeder, “Optical pulse timing resolution,”IEEE Trans.Inform. Theory,vol. IT-22, pp. 114–118, 1976.
[19] W. Kielek, “Single-shot accuracy improvement using right filtration andfraction values in multi-photoelectron case,” inProc. 5th Int. WorkshopLaser Ranging Instrum.,1984, pp. 112–118.
[20] , “Constant fraction discriminators in few- and multi-photoelectron laser ranging,” inProc. 6th Int. Workshop Laser RangingInstrum., 1986, pp. 189–195.
[21] , “Some results for few- and multi-photoelectron received signalprocessing,” inProc. 7th Int. Workshop Laser Ranging Instrum.,1989,pp. 293–299.
[22] A. O. Hero, “Timing estimation for a filtered Poisson process inGaussian noise,”IEEE Trans. Inform. Theory,vol. 37, pp. 92–106, 1991.
Waldemar A. Kielek was born in 1930 in Poland. He received the B.Sc.,M.Sc., and Ph.D. degrees and the higher Doctor’s degree (habilitation) inelectronic instrumentation from Warsaw University of Technology, Warsaw,Poland, in 1953, 1957, 1967, and 1989, respectively.
Since 1953, he has been with the Warsaw University of Technology, Facultyof Electronics, as Assistant Professor from 1967 to 1990, and AssociateProfessor from 1990 to the present. Since 1957, he has been involved indevelopment and construction of digital frequency and time interval high-accuracy measuring instruments for production in electronics industry andfor scientific applications, constructing 45 different models of electronicinstruments. Since 1970, he has been involved in projects and constructionof laser pulse distance to satellites measuring instruments, constructed incooperation with central and eastern European countries as part of the space“Interkosmos” scientific program. These instruments are deployed in 15exemplars all around the world for precise satellite orbit and geosciencemeasurements. He was responsible for the accuracy of precise distancemeasurements, dependent on time interval accuracy and proper estimation oftime while marked with very weak light pulses. His current interest is, amongothers, stochastic phenomena involved in time interval measurements in laser-pulse, distance-to-earth satellites, and measuring instruments with extremeaccuracy (in the order of a millimeter).