Embed Size (px)
Citation preview

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 1/15
1
A Model-Predictive Control Framework for
Railway Traffic Management
Pavle Kecman1, Nicolas Weiss
2, Rob M.P. Goverde
1, Ton J.J. van den
Boom2
1Delft University of Technology, Department of Transport and Planning, the Netherlands2Delft University of Technology, Delft Centre for Systems and Control, the Netherlands
{p.kecman, n.m.weiss, r.m.p.goverde, a.j.j.vandenboom}@tudelft.nl
Abstract
This paper proposes a model-predictive control framework for anticipative management
of railway traffic. The framework aims at closing the loop between timetabling and train
operations with a continuous feedback of train positions and field data to allow fastrescheduling of train paths in case of disturbances. The control algorithms use a priori
knowledge of the timetable structure and online observations of train positions and delays.
The predictive property of the railway traffic model enables a controller to anticipate on
the propagation of current delays and to estimate the effect of proposed dispatching
strategies. Based on feedback of the actual state of the railway system, the actual timetable
is monitored on a network scale and optimal adjustments are proposed to the traffic
controllers when the timetable no longer suffices or when logistic constraints (rolling
stock and train crews) are jeopardized.
Keywords
Dynamic railway traffic management, model-predictive control, railway operations, traffic
prediction
1 Introduction
Railway traffic is considered to be very inadaptable when subjected to disturbances
originating from external factors (weather, number of passengers and their behaviour, etc.)
as well as from internal entities from within a railway system (reliability of infrastructure
and vehicle equipment, behaviour of personnel, etc.). Disruptions in railway traffic are
considered to be inevitable and therefore, actions are made in order to minimize their
possible effect on the system both in the stage of timetable construction and in real time
during railway operation. In the process of timetabling it is crucial to have in mind the
importance of robustness and resilience of the timetable, i.e., its ability to resist and adapt
to minor disturbances. For that reason running time supplements and buffer times are
introduced in order to enable trains to make up for their delay and at least to some extent
avoid affecting other trains and creating secondary delays. However, both running timesupplements and buffer times are limited by capacity consumption constraints [15] and in
addition, neither of them is meant to compensate for major disruptions such as accidents,
infrastructure or vehicle equipment failures, etc. Therefore, good timetabling can only to
certain extent contribute to the punctuality of the railway traffic.

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 2/15
2
Dynamic railway traffic management at all levels (from the level of an interlocking
area to the network wide level) is necessary to make further effort to maintain the
punctuality of railway operations in real time. The concept of dynamic traffic
management has so far been widely understood as a reactive set of actions with the
purpose of minimizing the consequences of previously noted delays. In this paper we
propose a framework for railway traffic management based on model-predictive control
(MPC). The essential characteristic of the proposed framework is that it suggests
proactive and anticipative (in contrast to reactive) traffic management aiming to predict
the occurrence of potential conflicts and prevent them by performing certain control
actions. Moreover, the proposed model-predictive approach enables choosing the most
effective dispatching action using its feedback loop to verify and estimate the set of
possible actions.
The proposed MPC approach assumes having continuous feedback of train positions
and field data which are used as an input to running time prediction models whose output
is a vector of delays of all trains over the rolling prediction horizon. The railway traffic
prediction model can also be used as an evaluation tool in order to determine the optimal
dispatching strategy from the set of possible strategies. In other words, the MPCframework for railway traffic management consists of 3 components:
1. Monitoring train positions, speeds, condition and availability of infrastructure and
based on this determining up-to-date running time estimates
2. A real-time railway traffic prediction model continuously updated with field data and
dispatching actions
3. A model-predictive controller that optimizes future control decision by using
predictions of the future state and the current condition of railway operations.
The next section describes the current practice in railway traffic control and gives
comparisons to the proposed framework. Section 3 and 4 contain formulations of MPC
and the proposed framework for railway traffic management, respectively. Subsequent
sections give detailed descriptions of each of the 3 components separately and embedded
in the proposed framework. In the final section, the main conclusions are presented.
2 Current Practice in Railway Traffic Control
2.1 The Concept Based on Hierarchical Levels
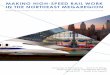
Current practice in railway traffic control on European networks is based on a multi level
hierarchy (Figure 1). The number of levels and the area under control at each level may
vary but essentially traffic control systems are split into a tactical and operational level
[21]. The tactical level (regional or network controllers) comprises the supervision of the
state of traffic on a network level, detection of deviations from the timetable, resolution of
conflicts affecting the overall network performance, handling failures and events that may
have big impact on performance indicators, etc. The operational level consists of local
traffic controllers (in major stations with a complex topology of interlocking areas) or
centres for remote control (for small stations with a simple topology and possible points of
conflict between major stations such as junctions, level crossings etc.) with the task to
perform all safety related actions, set routes for trains, predict and solve conflicts on alocal level and control processes that take place on the part of infrastructure under their
supervision.

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 3/15
3
Figure 1: Hierarchical structure of traffic control
The lower the hierarchical level the smaller is the area under control and the more
detailed is the control of train movements with respect to the network topology and
possible route conflicts. On the other hand, the higher the control level the more
comprehensible is the actual state of traffic on the network level, i.e., future train
movements and thus also global conflicts (passenger or logistic connections) and delays
are easier to predict. The situational awareness of local controllers (signallers) is limited to
their own interlocking area: to handle trains coming their way and dispatch them to anadjacent interlocking area following standard rules and their own experience without
further knowledge of the network wide consequences of their decisions. This situation
requires close interaction of local and network controllers because none of them is able to
have the overall view of the traffic situation on a global level [39]: the network traffic
controller can not monitor and control the train movements and infrastructure on a
microscopic level (interlocking areas and track occupation in the stations) while the localcontroller does not have the information (apart from the neighbouring local controllers)
about the movements of trains heading towards his/her area.
2.2 Integrated Traffic Control
The main task of the integrated railway traffic control system with its interdependent
components is to monitor the state of traffic on the network, forecast the state in the near
future, identify and solve conflicts and if necessary reschedule events defined in the
timetable to minimize deviation from the original plan.
From the current railway practice [4, 11, 15, 21, 25, 31, 39] it can be seen that the
process of railway traffic control takes the form of a loop where the information data
flows from the infrastructure (occupation, availability) and the trains (position) upward
towards the operational and tactical levels of control, whilst the flow of commands has the
opposite direction. Based on the current state and the traffic situation on the network, the
expected running time for each train heading towards their interlocking area is nowestimated by signallers based on their experience (they typically take the expected arrival
delay equal to the current upstream delay at the preceding interlocking area as they have
no information about possible recovery times). Network traffic controllers (tactical level)

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 4/15
4
are notified only after a train delay has become already significantly large and they then
have to reschedule trains reactively and try to prevent further accumulation of delays.
Control decisions on the level of network traffic controllers include reordering, rerouting,
revising services (cancelling transfers or trains, adding extra trains), rescheduling or using
spare resources, etc.). Those control actions need to be accommodated by local traffic
controllers who need to set train routes with regard to the microscopic network topology
and safety regulations.
Necessity for improvementsIn the forthcoming decade a further growth of both passenger and freight flows is
expected which will mostly have to be accommodated over the existing railway
infrastructure. This will lead to an increase of capacity utilization thus reducing reliability
and punctuality of railway services. Therefore, improvements in traffic management and
control have to be made in order to prevent a decrease of traffic reliability.
While the timetable is carefully planned a year in advance using sophisticated
mathematical models, the daily operational control of disruptions and delays still relies
predominantly on predetermined rules and the experience and skills of personnel withoutany significant support such as short-term traffic prognosis, conflict detection and
prediction or optimal dispatching. Working in a preventive manner is poorly supported
and train traffic controllers are usually restricted to just solving problems as they occur
[19]. Moreover, neither local nor network traffic controllers have a reliable supportingtool to predict the effect of their decisions and evaluate them.
Potential Impact of the MPC FrameworkThe MPC framework for railway traffic management [37] aims at providing the traffic
controllers with a decision support system based on algorithms that would be able to
collect and process data about the current state of traffic and infrastructure, predict and
detect possible conflicts, and propose the optimal way for their resolution, in real time. In
other words, the functional components of the MPC framework correspond to the process
of traffic control currently in practice on most railway networks. Moreover, each
component can separately be used as a support tool for railway traffic control. Both localand network traffic controllers would benefit from a tool for monitoring the current state
of traffic and infrastructure condition and making reliable short term traffic situation
estimates. Models for traffic prediction can be used to initiate and to evaluate the effect of
control actions on both levels (defining the new feasible timetable on the tactical level and
local conflict resolution and accommodation of the actual timetable on the operational
level). Finally, in the process of choosing the control actions to implement in case of
traffic disruptions, a model-predictive controller provides an adequate support for making
the most effective decision.
3 Model-Predictive Control
Model (based) predictive control represents a methodology with the purpose to optimize
forecasts of process behaviour over manipulable inputs [22]. It is a widely accepted and
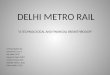
used control scheme in the process industry. All MPC systems rely on the idea of generating values for process inputs as solutions of an on-line (real-time) optimization of
predicted values of process outputs. Figure 2 shows the general structure and explains the
components of the MPC approach.

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 5/15
5
Process model
Optimizer
-
+
Real process
Reference
outputs
Predicted
outputs
Measurements
and disturbances
Objective
functionConstraints
Future
inputs
Figure 2: Basic structure of general MPC
On the basis of the internal process model, a prediction of system outputs over aspecified time horizon is made. The prediction can be either time driven or event driven,
i.e., triggered either at each predetermined time instant or by the occurrence of events. The
system outputs, predicted by the process model (based on the measurements from the
system) over a specified prediction horizon, are compared to the reference trajectory and
optimization is carried out with the purpose of computing control signals which would
direct the system towards the desired trajectory. The process model is again used to
estimate the effect of the proposed control signals. Thus the deviation from the reference
trajectory is minimized with respect to constraints which reflect the nature of the system,
safety or economic requirements, etc. After the optimal control sequence has been
computed, only the first control entry will be implemented and the complete cycle repeats
starting with the updated situation, the so called receding horizon principle [22].
Parameters that define the model predictive controller are [26]:• internal process model,
• disturbance prediction,
• objectives, reference trajectory and constraints,
• measurements,
• sampling period,
• prediction horizon.
4 Railway Traffic Management Based on MPC
4.1 General Framework Formulation
The use of the MPC approach for management of railway traffic relies on the fact that
MPC represents more of a methodology of controlling a variety of different processes
than a specific control technique [36]. Figure 2 shows the structure and relationshipsbetween the basic components of the MPC railway traffic management model embedded
in its environment. In order to fit into the integrated control framework presented in
section 2.2, the working timetable (Figure 3) can represent both the adjusted published
timetable on the network level, and the modified schedule of events on microscopic level

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 6/15
6
depending on the level of control action.
Figure 3: Model predictive controller and its environment
Railway traffic management based on MPC represents an approach in which control
and optimization are integrated, coordinated and organized in a closed-loop form [21].
Moreover, from the systems and control theory point of view it corresponds to a cascade
control system with two loops on different hierarchical levels (Figure 4). Outer loop has
the purpose to control and optimize the behaviour of the system under major disturbances
(global level) and sets the target or the reference trajectory for the inner loop which
distributes control actions on the local level. In addition, the inner loop handles minor
disturbances which do not initiate activation of the outer loop. Note how this approach
resembles the relationship between local and network controllers described in section 2.
4.2 Cascade Loops Control Framework
Railway operations are monitored on the network level and accurate field data about the
train positions, speeds, infrastructure conditions and availability are used to create reliable
estimates of running times which are further processed by the predictive traffic model,
yielding the state of the system over the prediction horizon. All local or global conflicts
are detected by the predictive traffic model and based on the outcome of prediction, only
inner (local conflicts) or both outer and inner loops (disturbances with global effect such
as passenger or logistic connections) are activated. The model-predictive controller
creates control signals (on one or both levels) which direct the system towards the desired
trajectory and whose impact and effect is evaluated by the predictive model.
The inner loop has the task to optimize control signals which would accommodate
and minimize the deviation from the target trajectory. When the outer loop is not
activated, the target is the published timetable and otherwise it is the working (updated)
timetable that is the outcome of the outer loop (optimization on global level with
objectives depending on the type and scale of disturbances).

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 7/15
7
Figure 4: MPC approach as a cascade control system
All three essential components of MPC framework for railway traffic management:
monitoring, the predictive traffic model and the model-predictive controller will be
analyzed in detail in the following sections.
5 Monitoring
5.1 Traffic Situation and Short-Term Prediction
One of the crucial requirements for traffic control and rescheduling systems is the early
and reliable detection of deviations and disturbances in railway operations. As presentedin section 2, traffic controllers use the information about the current state of traffic and
infrastructure, and their experience to make short-term estimates of the traffic situation.Depending on the traffic situation and infrastructure availability and condition, the
procedures leading to control actions on both local and global level can be initiated.
Precise information about the exact positions of trains, their speed and dynamics
together with reliable data about infrastructure occupation, up-to-date database of
temporary speed restrictions, blocked tracks and equipment failures are the essential
requirements for detection of deviations from the target trajectory, making reliable free
running time estimates with the purpose to predict the conflicting infrastructure claims
and project the traffic situation in the near future.
Detecting deviations from the target trajectory of a train before the actual occurrence
of conflicts with other trains is a crucial requirement which enables traffic controllers to
manage the traffic proactively and in an anticipative manner. In current practice
deviations (delays) are identified (existing delays are updated) only at stations withreference to scheduled arrivals, departures or passages. If the traffic controllers would
have accurate information about the running times and expected arrivals of trains heading
towards their area, many unscheduled stops or hindered train runs could be avoided by
resolving such conflicts in advance, by e.g. rerouting, changing the train order at the point

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 8/15
8
of conflict or giving speed advice to drivers.
5.2 Traffic and Infrastructure Monitoring Systems
Current practice in monitoring of railway traffic on European networks relies on so-called
train describer systems. The railway infrastructure (both open tracks and station areas) is
divided by the track side devices (e.g. axle counters, track circuits, balises) to sections
whose length may vary. Train describers use those devices as detection points of train
transitions from one section to another. Each train has been assigned a unique number by
which it is recognized by the train describer system. The role of train describers in themonitoring of railway traffic is limited to determining the occupied infrastructure sections
and the positions of trains with precision that depends on the length of the sections. No
additional information necessary for deriving running time estimates can be transmitted
apart from the average train speeds which can be computed based on the successive time
instants of train steps over the network sections and the lengths of the sections [11, 21].
Another method for monitoring the railway traffic which would enable overcoming the
drawbacks of train describers is the application of periodic train positioning (onpredetermined time instants) based on satellite positioning systems (GPS, Galileo). A
comparison of both methods with respect to their applicability in traffic monitoring and
deviation detection is given by Lüthi [21]. Salmi and Torkkeli [28] give a state of the art
survey of various applications of GPS in the railway sector.
5.3 Short-term Traffic Prediction Models
To predict the train positions over a larger distance and time horizons two approaches can
be pursued: (i) microscopic running time calculations based on train dynamics and
detailed infrastructure characteristics [16] or (ii) statistical procedures based on filtering
historical data and ex-post data analysis to learn how previous trains moved in similar
conditions. The first approach gives accurate running time estimations and it has so far
been used in the process of timetable construction and insertion of additional trains in the
existing timetable rather than for on-line use.Historical data obtained by a train positioning system (train describer or satellite
based) can be used to determine the (time or position) intervals for punctual (conflict free)
train runs. Lüthi [21] used the tolerance band approach to detect the deviation in train
runs. Ex-post data analysis can be used to determine the bandwidth (time window for train
describers or position window for periodic positioning). Van der Meer et al. [38]
presented a running time prediction model in which they used historical data to determine
running time dependency on delays, time of the day, rolling stock characteristics, and the
weather. In future research, the model could be extended and refined by including train
describers measured signals or periodic positioning sequences as update points for
running time estimation. Furthermore, the applicability of knowledge-based systems,
machine learning, neural networks and statistical pattern recognition for accurate and
intelligent prediction of train running times can be examined.
Mining train describers records data has previously been used by Goverde and Hansen
to assign section (track circuit) occupation and release times to a specific train (number)[14], to identify route conflicts and distinguish data sets of hindered and unhindered trains[6], and to find and explain variations in process times in stations [10]. Flier et al. [9] used
data mining technique to determine delay dependencies on a network wide scale. Yuan
[40] performed the ex-post data analysis to investigate delay propagation in stations.

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 9/15
9
6 Predictive Traffic Model
6.1 Importance and Main Tasks
Railway operations on heavily utilized networks are characterized by many simultaneous
processes and interdependent events. Deviation from the schedule in one or more
processes can, on such networks, have consequences that are very difficult to predict.
After a deviation from the schedule has been detected, both local and network traffic
controllers need to estimate the impact of the deviation on the future state of traffic in the
controlled area and react accordingly. Accurate prediction of conflicts is another essential
condition for proactive traffic management which implies resolving the conflicts or
diminishing their potential effect before they actually occur. Local controllers have to
predict the possible route conflicts and network controllers determine jeopardized
passenger and logistic connections and estimate the effect of the deviation on global level.
Traffic controllers on both levels need to determine the set of appropriate control actions
which would minimize the negative effect of traffic disturbance on performance
indicators.However, due to the strong interdependence between train runs and the large number
of possible control actions, the impact of detected deviations, as well as the effect of
feasible dispatching decisions is almost impossible to predict without the aid of an
appropriate decision support system.
A model for traffic prediction should, as a supporting tool for traffic controllers, give
accurate forecasts of conflicts (on both global and local level) resulting from the detected
deviations and disruptions in traffic and infrastructure. Moreover, the predictive model
has the task to estimate the effect and evaluate the quality of the potential control
decisions with regard to the objectives which depend on the level of control (tactical or
operational). An important requirement for such models is that the computation time
should be short enough to enable their implementation in real-time applications.
6.2 Mesoscopic Character of the Model
Advanced microscopic simulation tools are able to accurately simulate railway operations
based on a detailed modelling of infrastructure, signalling, rolling stock characteristics,
train dynamics and the timetable [16, 24], but using microscopic models to capture the
structure and processes on large, complex and heavily utilized railway networks can result
in long computation times, which makes such models inappropriate for real-time
applications. On the other hand, macroscopic models based on deterministic process
times between timetable reference points, provide computational performance applicable
even for large networks [13].
Prediction models, in order to be appropriate for implementation in real-world railway
operations, need to fit in the cascade loop control concept described in section 4.2. In
other words, its task depends on the loop in which it is active. In the outer control loop,
the model has to predict the effect of large disruptions and evaluate control actions on a
global level, for which the macroscopic level is appropriate. In the inner control loop, the
predictive model needs to take into account the precise network topology and projectdetailed processes and control decisions on a microscopic level. Thus a mesoscopic model
consisting of a macroscopic model with local microscopic network structures whenever
necessary (i.e. at disrupted areas) would be the appropriate tool for traffic prediction in the

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 10/15
10
model-predictive control framework.
6.3 Models Based on Graph Theory
The macroscopic model of railway operations based on timed event graphs and max-plus
algebra [1, 18] allows fast computation of performance indicators and delay propagation
in short time even on large networks for both deterministic and stochastic process times
[2, 11, 12, 13, 17]. However, max-plus systems assume a fixed structure, i.e., fixed train
orders, sequences, and routes. That means that the modelling of dispatching actions which
may prevent delay propagation, such as changing the order of trains, cancelling a train ora connection, etc., can not be done using the conventional max-plus systems.
Van den Boom & De Schutter [9, 33, 34, 35] proposed a new approach called
switching max-plus linear systems that can be used to incorporate discrete dispatching
actions such as train order changes or connection cancellations into the max-plus
framework. This approach uses different max-plus linear models each of which
corresponds to a specific mode describing the railway traffic model with respect to the
specified order of events and synchronization constraints. The system is managed byswitching between different modes, thus allowing the inclusion of discrete decisions into
the model. Goverde [13] presented an efficient graph algorithm for computing delay
propagation on large networks which can be used to evaluate the effect of each set of
dispatching actions (mode, graph structure) on the global level.
In the context of MPC railway traffic management, a predictive traffic model based onswitching max-plus linear systems can be used to predict the values of performance
indicators after certain dispatching actions, where each dispatching action will result in
the switch of the system into an appropriate mode. Offline preconstruction of modes
reflecting all possible dispatching decisions that would be called when needed is not an
option due to the vast consumption of memory in case of modelling large networks withmany interconnected lines. Therefore, the modes should be constructed on the fly by an
algorithm given the current availability of infrastructure and resources.
Schöbel [30] used a graph model based interpretation of railway operations to
optimize the solution to delay management problem. The model was further extended byinclusion of headways and capacity constraints [29].
Another model for real-time railway traffic management that relies on graph
interpretation of railway operations is based on alternative graphs [5, 7, 8]. In this
microscopic graph representation of railway traffic each decision variable (order of trains
at a point of conflict) is modelled by a pair of alternative arcs. Only one arc in each pair
can be selected resulting in dismissing his companion arc. A complete selection
corresponds to the situation where one arc has been chosen from each pair of alternative
arcs defining train orders at each point of conflict. Every choice between alternative arcswithin one pair corresponds to a dispatching decision. In the context of the MPC
framework for railway traffic management, each complete selection of alternative arcs can
be regarded as one mode in switching max-plus algebra framework. The critical path
method can be used to calculate the time of all train events within the prediction horizon.
This representation has been successfully applied for real-time railway traffic application
in local dispatching areas.

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 11/15
11
7 Model-Predictive Controller
7.1 Different Aspects of Optimization
Disturbances in railway operations can have different magnitudes. From minor deviations
in process times to major disruptions such as accidents, infrastructure failures, track
closures etc. Their impact depends on the traffic situation, and moreover, on the location
on the railway network and the time of occurrence. In the previous section, the importance
of accurate predictions of conflicts, their consequences, as well as the impact of resulting
control actions on performance indicators in general has been emphasized. However, it is
important to point out that the scale of disruptions, their effect, location, and time of their
occurrence are the actual factors that determine the set of performance indicators that need
to be optimized and the constraints for their optimization. The objectives can range from
minimizing the deviation from the published timetable (in case of minor disturbances) to
maximizing the throughput and ensuring the traffic flow in case of major disruptions. An
overview of the different optimization criteria and the corresponding time requirements
are given by Lüthi [21].In current railway practice, rescheduling on both tactical and operational level is
performed without adequate decision support systems and relies predominantly on the
experience of controllers and predetermined rules which do not guarantee suitability of the
control decisions and their quality [39].
7.2 Hierarchical Approach to Optimization
In the MPC framework for railway traffic management, the objective function and
constraints, in the process of computing the optimal control actions, depend on the loop in
which the model-predictive controller is active. The hierarchical relationship between the
two loops is maintained. That means that the objective for optimization in the inner loop is
minimizing the deviation from the target set by either the published timetable or the outer
loop. The control variables in the inner loop can be the order of trains on conflict points,
assignment of station tracks or routes over interlocking areas, etc. The constraints which
need to be taken into account on the operational level reflect the actual state of traffic and
infrastructure on the microscopic level, and safety requirements.
On the other hand, on the tactical level, where the outer loop is active, optimization
criteria reflect the global network performance indicators, such as total or average
weighted delay, passenger or logistic connections, timetable realization with the planned
resources (personnel crews and rolling stock), maintaining the traffic flow between
stations using predetermined or alternative routs, etc. The constraints which characterize
the optimization on the tactical level include the actual state of traffic and infrastructure
on the global level, availability of resources, market-based and user-oriented constraints,
etc. In other words, the tactical level of model-predictive controller has a task to
determine in real time the feasible values of controllable input variables (schedule of
events, train routes, maintained and cancelled connections, cancelled/added trains,
activation of rolling stock and personnel from “hot reserve”, etc.) that would ensure the
optimal values of performance indicators on the network wide level. The choice of performance indicators, objectives, and criteria for optimization should be user-oriented.
If for instance, performance indicators would rely solely on overall or average delays and
the objective function on their minimization that would surely result in cancelling all
passenger connections and transfers. If reliable data about passenger flows (O-D matrices

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 12/15
12
in time windows) could be obtained then a specific penalty coefficient could be assigned
to each connection reflecting the number of passengers which would be affected by its
cancellation.
7.3 Existing Applicable Models
The operations research literature on railways has focused mainly towards optimization
models for offline tactical planning. For operational traffic management however, these
models can not be used due to extensive computation times [3]. Recently developed
railway traffic management algorithms are based on microscopic models and limited to
managing small disruptions without changing the actual timetable and use decomposition
of large networks to local areas [23, 27], corridors [7] or a number of connected and
coordinated small networks [5]. Real-time computation time requirements prevent direct
extensions of these models to large-scale networks of strongly interconnected lines.
Global, network scale optimization therefore requires an efficient higher-level controller
that optimizes the actual state over the overall network and controls the traffic from a
global perspective with adjustments to the timetable. Operational requirements for on-linetraffic management on a global scale are given by Hansen [15] and a survey of models
and algorithms by Törnquist [32] and D’Ariano [7].
As presented in the previous section, the application of the models based on graph
theory is shown to be a promising approach to model and optimize railway operations in
real-time [5, 7 ,13, 29, 30, 33, 34, 35].
8 Summary
This paper presented a framework for dynamic management of railway traffic on large
and heavily utilized networks. The framework follows the pattern and hierarchical
character of the current practice in traffic control and relies on already verified principles
and approaches, combining them into a concept which should result in a proactive tool for
anticipative traffic management. The approach to railway traffic management based on
model-predictive control aims at closing the loop between timetabling and train
operations with a continuous feedback of train positions and field data to allow fast
rescheduling of train paths in case of disturbances. The MPC approach has been divided
in three interconnected components: monitoring, a predictive traffic model, and a model
predictive controller. Each of them has been analyzed separately with regard to its
potential impact on improving the current traffic control practice and supported with the
review of relevant models and approaches from the respective fields. However, only
functional integration of all components would yield the complete decision support
systems for effective traffic control on all levels. Computational aspects have been taken
into account and the applicability in real-time on a network wide level has been analyzed
of each component individually and in the context of possible implementation in the MPC
framework. Results of all presented models reveal that there is a promising starting point
for future research and model development.
AcknowledgementThis paper is a result of the research project funded by the Dutch Technology Foundation,
STW: “Model-Predictive Railway Traffic Management” (project no. 11025).

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 13/15
13
References
[1] Bacceli, F., Cohen, G., Olsder, G.J., Quadrat, J.P., Synchronization and Linearity,
Willey, New York, 1992.[2] Braker, J.G., Algorithms and applications in timed discrete event systems, PhD thesis,
Delft University of Technology, Delft, 1993.
[3] Caprara, A., Kroon, L., Monaci, M., Peeters, M., Toth, P., “Passenger Railway
Optimization”, In: Barnhart, C., Laporte, G. (eds.), Transportation, Handbooks in
Operations Research and Management Science, Vol. 14, pp. 129-187, Elsevier,
Amsterdam, 2007.
[4] Cui, Y., Simulation-Based Hybrid Model for a Partially-Automatic Dispatching of
Railway Operation, PhD thesis, Universität Stuttgart, Stuttgart, 2010.
[5] Corman, F., Real-time Railway Traffic Management: Dispatching in Complex, Large
and Busy Railway Networks, PhD thesis, Delft University of Technology, Delft,
2010.
[6] Daamen, W., Goverde, R.M.P., Hansen, I.A., “Non-Discriminatory AutomaticRegistration of Knock-On Train Delays”, Networks and Spatial Economics, vol. 9,
no. 1, pp. 47-61, 2009.
[7] D’Ariano, A., Improving real-time train dispatching: models, algorithms and
applications, PhD thesis, TRAIL Thesis Series, no. T2008/6, Delft, 2008.
[8] D'Ariano, A., Pranzo, M., Hansen, I.A., "Conflict Resolution and Train Speed
Coordination for Solving Real-Time Timetable Perturbations." IEEE Transactions on
Intelligent Transportation Systems, vol. 8, no.2, pp. 208-222, 2007.
[9] De Schutter, B., Van den Boom, T.J.J., Hegyi, A., “A model predictive control
approach for recovery from delays in railway systems”, Transportation Research
Record , vol. 1793, pp. 15-20, 2002.
[10] Flier, H., Gelashvili, R., Graffagnino, T., Nunkesser, M., Mining Railway Delay
Dependencies in Large-Scale Real-World Delay Data, in: Ahuja, R.K., et al. (eds.):
Robust and Online Large-Scale Optimization, Lecture Notes in Computer Science,
vol. 5868, pp. 354–368. Springer, Berlin/Heidelberg, 2009.
[11] Goverde, R.M.P., Punctuality of Railway Operations and Timetable Stability Analysis, PhD thesis, TRAIL Thesis Series, no. T2005/10, Delft, 2005.
[12] Goverde, R.M.P., "Railway Timetable Stability Analysis Using Max-Plus System
Theory" Transportation Research Part B, vol. 41, no. 2, pp. 179-201, 2007.
[13] Goverde, R.M.P.,"A Delay Propagation Algorithm for Large-Scale Railway Traffic
Networks", Transportation Research Part C , vol. 18, no. 3, pp. 269-287, 2010.
[14] Goverde, R.M.P., Hansen, I.A., “TNV-Prepare: Analysis of Dutch Railway
Operations Based on Train detection Data'”, In: Allan, J., Hill, R.J., Brebbia, C.A.,
Sciutto, G., Sone, S. (eds.), Computers in Railways VII , pp. 779-788, WIT Press,
Southampton, 2000.
[15] Hansen, I.A., “Railway Network Timetabling and Dynamic Traffic Management”,
International Journal of Civil Engineering, vol. 8, no. 1, pp. 19-32, 2010.
[16] Hansen, I.A., Pachl, J., (eds.), Railway Timetable and Traffic: Analysis, Modelling,
Simulation, Eurailpress, Hamburg, 2008.
[17] Heidergott, B., de Vries, R., “Towards a Control Theory for TransportationNetworks”, Discrete Event Dynamic Systems, vol. 11, no. 4, pp. 371-398, 2001.
[18] Heidergott, B., Olsder, G.J., Quadrat, J.P., Max Plus at Work: Modeling and Analysis
of Synchronized Systems, Princeton University Press, Princeton, 2006.

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 14/15
14
[19] Kauppi, A., Wikström, J., Sandblad, B., Andersson, A.W., “Future Train Traffic
Control: Control by Re-planning”, Cognition, Technology & Work , vol. 8, no. 1,
pp.50-56, 2006.
[20] Lüthi, M., Weidman, U., Laube, F., Medeossi, G., “Rescheduling and Train Control:
A New Framework for Railroad Traffic Control in Heavily Utilized Networks”, 86th
Transportation Research Board Annual Meeting 2007, Washington, 2007.
[21] Lüthi, M., Improving the Efficiency of Heavily Used Railway Networks Through
Integrated Real-Time Rescheduling, PhD thesis, ETH Zurich, Zurich, 2009.
[22] Maciejowski, J.M., Predictive Control with Constraints, Prentice Hall, Pearson
Education Limited, Harlow, 2002.
[23] Mazzarello, M., Ottaviani, E., “A Traffic Management System for Real-Time Traffic
Optimization in Railways”, Transportation Research Part B, vol. 41, no. 2, pp. 246-
274., 2007.
[24] Nash, A., Huerliman, D., “Railroad simulation using OpenTrack”, In: Allan, J.,
Brebbia, C.A., Hill, R.J., Sciutto, G., Sone, S. (eds.), Computers in Railways IX , pp.
45-54, WIT Press, Southampton, 2004.
[25] Pachl, J., Railway Operation and Control, VDT Rail Publishing, Mountlake Terrace,2002.
[26] Rawlings, J.B.,“Tutorial overview of model predictive control”. IEEE Control
Systems Magazine, vol. 20, iss. 3, pp. 38-52, 2000.
[27] Sahin, I., “Railway Traffic Control and Train Scheduling Based on Inter-Train
Conflict Management”, Transportation Research Part B, vol. 33, no. 7 pp. 511-534,
1999.
[28] Salmi, P., Torkkeli, M. “Inventions Utilizing Satellite Navigation Systems in the
Railway Industry: An Analysis of Patenting Activity”, Journal of Technology
Management & Innovation, vol.4, no.3, pp. 46-58, 2009.
[29] Schachtebeck, M., Schöbel, A., “To Wait or Not to Wait-And Who Goes First? Delay
Management with Priority Decisions”, Transportation Science, vol. 44, no. 3, pp.
307-321, 2010.
[30] Schöbel, A., “Integer Programming Approaches for Solving the Delay Management
Problem” Lecture Notes in Computer Science, 2007, vol. 4359/2007, pp. 145-170,2007.
[31] Theeg, G., Vlasenko, S., (eds.), Railway Signalling & Interlocking: International
Compendium, Eurailpress, Hamburg, 2009.
[32] Törnquist, J., “Railway traffic disturbance management-An experimental analysis of
disturbance complexity, management objectives and limitations in planning horizon”,
Transportation Research Part A, vol. 41, no. 3, pp. 249-266, 2007.
[33] Van den Boom, T.J.J., De Schutter, B., “Modelling and control of railway networks”,
Proceedings of the American Control Conference, Boston, 2004.
[34] Van den Boom, T.J.J., De Schutter, B., “Modelling and control of discrete event
systems using switching max-plus-linear systems”, Control Engineering Practice,
vol. 14, no. 10, pp. 1199-1211, 2006.
[35] Van den Boom, T.J.J., De Schutter, B., “On a model predictive control algorithm for
dynamic railway network management”. Proceedings of the 2nd International
Seminar on Railway Operations Modelling and Analysis ( RailHannover 2007).Hanover, 2007.
[36] Van den Boom, T.J.J., Stoorvogel, A.A., Model Predictive Control, DISC course
lecture notes, 2008.

8/2/2019 Rail Rome 2011 Final
http://slidepdf.com/reader/full/rail-rome-2011-final 15/15
15
[37] Van den Boom, T.J.J., Goverde, R.M.P., Hansen, I.A., De Schutter, B., “Model-
Predictive Railway Traffic Management”, Project Proposal for the Open Technology
Programme, STW, 2009.
[38] Van der Meer, D.J., Goverde, R.M.P., Hansen, I.A., “Prediction of Train Running
Times and Conflicts Using Track Occupation Data”, 12th WCTR, Lisbon, 2010.
[39] Van den Top, J., Modelling Risk Control Measures in Railways, Analysing how
Designers and Operators Organise Safe Rail Traffic, PhD thesis, Delft University of
Technology, Delft, 2010.
[40] Yuan, J., Stochastic Modelling of Train Delays and Delay Propagation in Stations ,
PhD thesis, TRAIL Thesis Series, no. T2006/6, Delft, 2006.