Embed Size (px)
Citation preview
Robo4x 6.0.1 1
edX Robo4MiniMS– LocomotionEngineering
Block1– Week3– Unit1Raibert VerticalHopper
Video6.1
Segment6.0.1Motivation&Agenda
DanielE.Koditschekwith
Wei-HsiChen,T.TurnerToppingandVasileiosVasilopoulosUniversityofPennsylvania
July,2017
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 2
Agenda• Historical
§ corecomponentofRaibert’sHoppers
§ inspiredmuchfurtherwork• Conceptual
§ 1DoF vertical“heartbeat”§ organizingrhythmaround
whichotherDoF arecoordinated
• Technical§ firstlookathybriddynamics§ centralfeatureoflocomotion
M.H.Raibert.LeggedRobotsThatBalance.Cambridge:MITPress,1986
https://www.youtube.com/watch?v=XFXj81mvInc
M.Buehler,D.E.Koditschek,andP.J.Kindlmann,“Afamilyofrobotcontrolstrategiesforintermittentdynamicalenvironments,”IEEEControlSystemsMagazine,vol.10,pp.16–22,1990.
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 3
SagittalPlaneMachine• Raibert reducedcomplexity
§ initially,ofcontroltask§ bymechanicalrestriction§ to2dim.workspace§ yields3DoF configurationspace
• ControlIdeasGeneralize§ tospatialmachinein3dim§ with6DoF§ andbeyond figuresfrom:
M.H.Raibert.LeggedRobotsThatBalance.Cambridge:MITPress,1986
videofrom:PlasticPals.“RobotsfromMIT'sLegLab”.YouTubevideo,02:28.Posted[October31,2011].https://www.youtube.com/watch?v=XFXj81mvInc
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 4
• Problemsetting§ 3DoF (RPR) kinematics§ 6dimdynamics
• highlynonlinear(and“hybrid”)• tightlycoupled• underactuated
• Raibert’s controlpolicies§ use(mostly)“proportional-derivative”feedbackloops§ assumeeachDoF isdecoupledfromothers§ “time-share”theactuationresources
• airvalveadjustmentoflegspringinstanceforheightcontrol• hipactuatorcontrolofpitchinstance• hipactuatorselectionoflegangleinflightforfore-aftvelocity
figuresfrom:M.H.Raibert.LeggedRobotsThatBalance.Cambridge:MITPress,1986
RobustModularRobotController
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 5
ControlofHybridDynamics• leggedlocomotionresultsfrom
§ groundreactionforces(GRF)§ impartedtothebodymasscenter§ throughthelimbs
• limbsmake&breakgroundcontact§ introducingimpulses§ changingtheGRFdynamics§ yieldhybriddynamics
• continuous-in-timeforce-driven• discrete-in-timeevent-driven
• controlofhybriddynamics§ byactuationthroughlimbs§ mustbecoordinatedin
continuoustime§ andsensitivetothelimb-contact
events
M.H.Raibert,“LeggedRobots,”Commun.ACM,vol.29,no.6,pp.499–514,Jun.1986.
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 6
OtherMachines“Anchor”VerticalHopper• Verticalhopper
§ Canbeusedasa“template”
§ tobe“anchored”§ asthe“heartbeat”
• Inmorecomplexsystems§ 2DoF§ 3DoF§ …andbeyond
Raibert,MITPress,1986,op.cit.
Buehler,etal.IEEEControlSystemsMagazine,1990, op.cit.
A.Rizzi,L.Whitcomb,andD.Koditschek,“Real-TimeControlofaSpatialRobotJuggler,”IEEEComputer,vol.25,no.5,pp.12–24,1992.
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 7
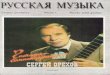
InitialApproachtoVerticalHopper• ModelContinuoustime
flows§ eachmode ofcontact§ governedbydifferentVF
• Modelnaturalguardconditions§ physicalevent interrupts
mode§ locomotion:typically
LO/TD• Study/Expressmodemap• Modelreset map• Compose
§ modemapo resetmap§ furthercomposeeach
compositioninturn• Endupwithreturnmap
figuremodifiedfromRaibert,Commun.ACM,1986,op.cit.
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 8
edX Robo4MiniMS– LocomotionEngineering
Week6– Unit1Raibert VerticalHopper
Video6.2
Segment6.1.1ContinuousTimeModels
DanielE.Koditschekwith
Wei-HsiChen,T.TurnerToppingandVasileiosVasilopoulosUniversityofPennsylvania
July,2017
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 9
InitialApproachtoVerticalHopper• ModelContinuoustime
flows§ eachmode ofcontact§ governedbydifferentVF
• Modelnaturalguardconditions§ physicalevent interrupts
mode§ locomotion:typically
LO/TD• Study/Expressmodemap• Modelresetmap• Compose
§ modemapo resetmap§ furthercomposeeach
compositioninturn• Endupwithreturnmap
figuremodifiedfromRaibert,Commun.ACM,1986,op.cit.
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 10
GravityLoadedHooke’sLawSpring• ReworkSeg.1.2.1.1-eqn(4)
• NotedifferencesfromFDHO§ usingvariablec todenoteverticalextension
• ratherthanby asinpendulumorx:=c - cr asinDHO• tofocusonroleofrelaxedspringpositioncr >0
§ additionofgravitationalforce,FG:=- mg
PropertyofPennEngineeringandDanielE.Koditschek
Robo4x 6.0.1 11
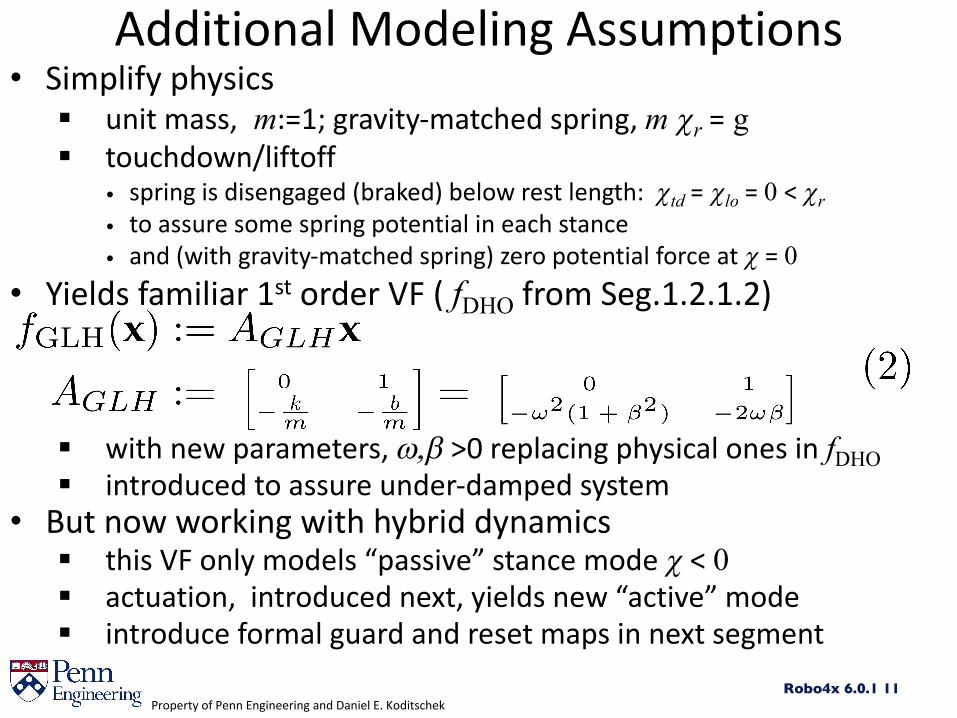
AdditionalModelingAssumptions• Simplifyphysics
§ unitmass, m:=1;gravity-matchedspring,m cr = g§ touchdown/liftoff
• springisdisengaged(braked)belowrestlength:ctd = clo =0 <cr• toassuresomespringpotentialineachstance• and(withgravity-matchedspring)zeropotentialforceatc =0
• Yieldsfamiliar1st orderVF(fDHO fromSeg.1.2.1.2)
§ withnewparameters,w,b >0replacingphysicalonesinfDHO§ introducedtoassureunder-dampedsystem
• Butnowworkingwithhybriddynamics§ thisVFonlymodels“passive”stancemodec <0 § actuation,introducednext,yieldsnew“active”mode§ introduceformalguardandresetmapsinnextsegment
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 12
ActiveStanceMode:EnergyInjection• Raibert’s originalhopperhadan“air-spring”
§ pneumaticpumpadjustedpressureinair-chamber§ controlleraddedfixedenergy(viapressure)§ at“bottom”:createsnew“active”modewithownVF
• Presentmodeluses“series-elastic”actuator(SEA)§ forcecontrolviaspringrest-lengthadjustment§ popularizedbyPratt;stillactivelydeveloped,e.g.
• https://www.youtube.com/watch?v=wJwKwLUUTjcC.S.Knabe,V.Orekhov,M.A.Hopkins,B.Y.Lattimer,andD.W.Hong,“Twoconfigurationsofserieselasticactuatorsforlinearlyactuatedhumanoidrobotswithlargerangeofmotion,”inHumanoidRobots(Humanoids),201414thIEEE-RASInternationalConferenceon,2014,pp.1096–1096
§ presentuse:introduceconstantupwardthrustforce• initiatedat“bottom”asbefore(controlledtoperformpositivework)• restoresenergylosttodampingeachsuccessivestance
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 13
ActiveStanceModeControl• SEAforcecontrol:an“inversestatics”controlpolicy
§ assumeactuatorcanmovespringrestlength,cr• exactprecisioninpositionandtiming• knowninversestaticsforgravity-loadedHooke’sspring
§ givenadesiredreferenceforceprofile,• actuatorrestlengthcommand
• injectsexactlytherightforceattherighttime
• Getnewdynamics
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 14
ConstantThrustControlPolicy• Stancecontrolstrategy
§ holdrestlengthfixedatnominal• untilcompressionendsat“bottom”• definedbyvanishingofguard function
§ atwhichpointinjectconstantupwardthrustforce
§ forbrieffixedtimeintervalafterbottom
• YieldsdampedconstantthrustVF
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 15
BallisticFlightMode
• Decompressioncontinuesafterendofthrust§ restlengthagainfixedatnominal
• untildecompressionendsat“liftoff”• definedbyvanishingofguard function
§ atwhichpointgroundreactionforcescease• onlyforceisduetogravity• yieldsflightmodeVF
PropertyofPennEngineeringandDanielE.Koditschek
Robo4x 6.0.1 16
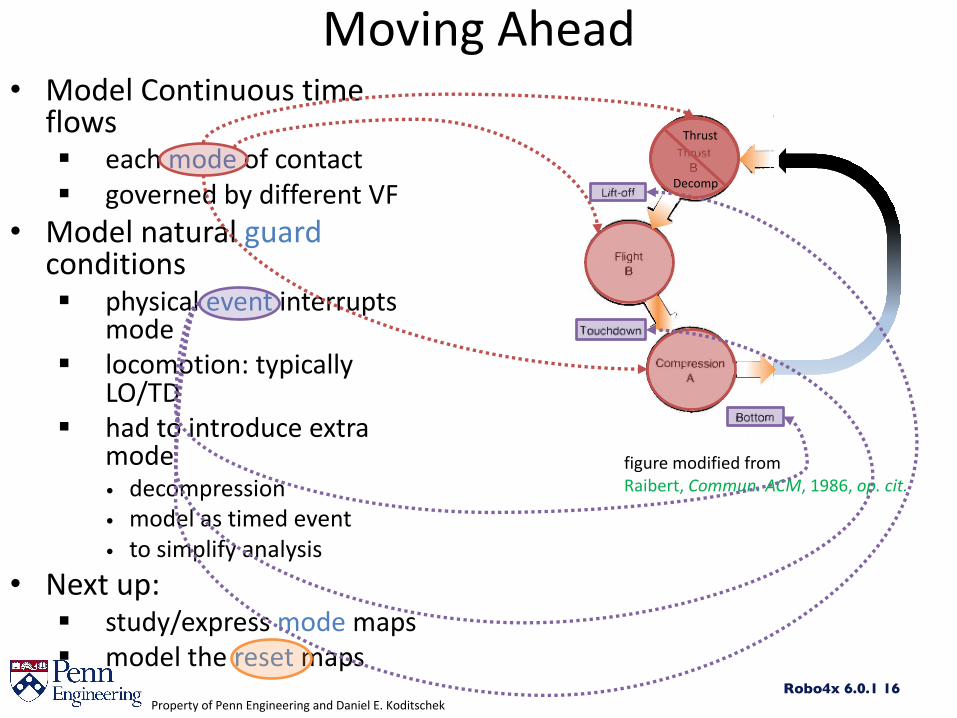
• ModelContinuoustimeflows§ eachmode ofcontact§ governedbydifferentVF
• Modelnaturalguardconditions§ physicalevent interrupts
mode§ locomotion:typically
LO/TD§ hadtointroduceextra
mode• decompression• modelastimedevent• tosimplifyanalysis
• Nextup:§ study/expressmodemaps§ modelthereset maps
MovingAhead
figuremodifiedfromRaibert,Commun.ACM,1986,op.cit.
Thrust
Decomp
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 17
edX Robo4MiniMS– LocomotionEngineering
Week6– Unit1Raibert VerticalHopper
Video6.3
Segment6.1.2ContinuousTimeModeMaps
DanielE.Koditschekwith
Wei-HsiChen,T.TurnerToppingandVasileiosVasilopoulosUniversityofPennsylvania
July,2017
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 18
InitialApproachtoVerticalHopper• ModelContinuoustime
flows§ eachmodeofcontact§ governedbydifferentVF
• Modelnaturalguardconditions§ physicaleventinterrupts
mode§ locomotion:typically
LO/TD• Study/Expressmode map• Modelreset map• Compose
§ modemapo resetmap§ furthercomposeeach
compositioninturn• Endupwithreturnmap
figuremodifiedfromRaibert,Commun.ACM,1986,op.cit.
Thrust
DecompressionMap
FlightMap
CompressionMap
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 19
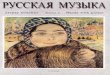
BallisticFlightModeFlowMapDefinition• Exercisesforthissegmentshow
• FlightendsatTouchdown§ which,recall,occurswhenc = ctd :=0 § representedbythevanishingofguard
• Nowsolvethevanishingconditionfort
• togetimplicitfunction,
• yieldingmodeflowmap
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 20
GravityLoadedHooke’sLawSpringFlow• RecallfromSeg. 1.2.1.2 &exercisesRCcoordinates
• Reveals“oscillatory”(underdamped)GLHflow
• Simplifystillfurthervianonlinear(“polar”)CCD
(don’tconfusewithSeg.1.2.2.1vector!)• Exercises:decoupledconjugateVFwithsimpleflow
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 21
CompressionFlowMapDefinition• Compressionstartsattouchdown,• Compressionendsat“bottom”
§ which,recall,occurswhen§ representedbythevanishingofguardpreferablyexpressedinpolarRCcoordinates
• Solvevanishingconditionfort inpolarRCcoords
• Yieldsmodeflowmap
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 22
DampedConstantThrustModeFlow
• Raibert’s strategyofconstantthrustfrombottom• Resultsinfamiliar2nd orderODE• Yields1st orderVF
• WithfamiliarflowderivedfromfD inSeg.1.2.1.1• Resultingin
D.E.KoditschekandM.Bühler.Analysisofasimplifiedhoppingrobot.TheInternationalJournalofRoboticsResearch,10(6):587–605,Dec1991
PropertyofPennEngineeringandDanielE.Koditschek

Robo4x 6.0.1 23
InitialApproachtoVerticalHopper• ModelContinuoustime
flows§ eachmodeofcontact§ governedbydifferentVF
• Modelnaturalguardconditions§ physicaleventinterrupts
mode§ locomotion:typically
LO/TD• Study/Expressmode map• Modelreset map• Compose
§ modemapo resetmap§ furthercomposeeach
compositioninturn• Endupwithreturnmap
figuremodifiedfromRaibert,Commun.ACM,1986,op.cit.
Thrust
DecompressionMap
FlightMap
CompressionMap
PropertyofPennEngineeringandDanielE.Koditschek
Robo4x 6.0.1 24
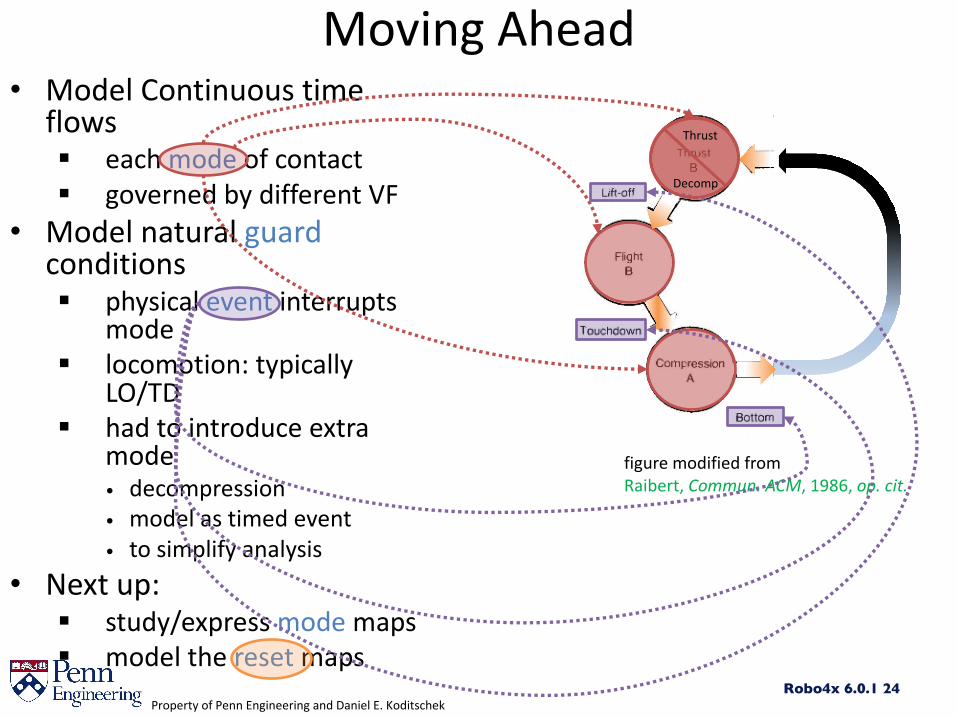
• ModelContinuoustimeflows§ eachmode ofcontact§ governedbydifferentVF
• Modelnaturalguardconditions§ physicalevent interrupts
mode§ locomotion:typically
LO/TD§ hadtointroduceextra
mode• decompression• modelastimedevent• tosimplifyanalysis
• Nextup:§ study/expressmodemaps§ modelthereset maps
MovingAhead
figuremodifiedfromRaibert,Commun.ACM,1986,op.cit.
Thrust
Decomp
PropertyofPennEngineeringandDanielE.Koditschek