Embed Size (px)
Citation preview

QUIET-TRACK: Track
optimisation and monitoring
for further noise reduction
dr.ir. Geert Desanghere
Akron, Belgium
www.akron.be

Quiet-Track: EU-project: Consortium
QUIET-TRACK: Track optimisation and monitoring for further noise reduction 2

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 3
1 Monitoring of rail roughness, track dynamic properties and average wheel roughness
1.1 Monitoring of rail roughness
1.2 Monitoring of track decay rate
1.3 Investigation of Track Decay Rates (TDR) of embedded rails
1.4 Average wheel roughness determination
2 Rolling contact model enhancement in the existing rolling noise models
2.1 Rolling contact model enhancement
2.2 Model for low frequency noise emission
3 Concepts and tools for noise related track maintenance
3.1 Concepts for acoustic rail grinding
3.2 Concepts for rail profile correction
3.3 Development of a noise related track maintenance tool
Work packages

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 4
4 Development and validation of high performance solutions for reduction of track related noise
4.1 Combination of existing track solutions
4.2 Innovative solutions based upon reduced rail roughness growth rate
4.3 Acoustical embedded rail
4.4 Rail type and hardness selection for optimal acoustic performance and wear
5 Development of noise management tools
5.1 Procedure for performance measurement of mitigation measures
5.2 Noise management tool for track maintenance activities
5.3 Noise management tools for noise mitigation solutions at the track level
Work packages

• W/R NOISE program:
– is a further development of the original wheel-rail noise emission models developed by Paul Remington
– further developed than TWINS
– includes the possibility to import measured track and wheel impedances (horizontal, vertical and cross) or calculated impedances by a very precise dynamic finite element model.
– source code of W/R Noise in Matlab,
• Enhancement:
– introduction of realistic multi-point wheel-rail contact conditions in curves (and in some worn tangent track sections).
– existing models use a Hertzian single point contact with a roughness wavelength filter which is only related to vehicle speed and not to the real wheel-rail contact conditions which are influenced by rail wear, curving, presence of defects.
Modelling Enhancement:
New multi-point W/R contact model
QUIET-TRACK: Track optimisation and monitoring for further noise reduction 5

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 6
• Validation:
a complete numerical noise analysis with the enhanced W/R Noise model or
two selected reference track systems.
– a tangent track with discretely supported rails on sleepers in a ballasted
bed
– a similar curved track,
– considering the same vehicle at the same speed and the same rail type.
• input parameters for the noise calculations will be measured: TDR’s, rail
roughness and average wheel roughness.
• track and wheel impedances will be measured and computed.
• rail profiles (influencing the wheel-rail contact conditions) will be measured.
The numerical results obtained with the different sets of input parameters will
be compared with measured pass-by noise measurement results.
Modelling Enhancement:
New multi-point W/R contact model

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 7
• Procedure for calculating the low frequency noise emission below 250 Hz and propagation
– based on the use of deterministic models (acoustic finite elements and boundary elements).
– will be integrated as a specific module within the enhanced W/R Noise software.
• Validation:
A complete numerical noise analysis below 250 Hz with acoustic boundary element analysis and above 250 Hz with the existing W/R Noise software will be carried for two selected reference track systems
– one embedded track
– one track with discretely supported rails on sleepers in a ballasted bed,
– same approach
– compared with measured pass-by noise measurement results.
Modelling enhancement:
Model for low frequency noise emission

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 8
• Normal rolling noise on straight track
– Absence of wheel and rail imperfections or discontinuities leading to
impact noise (wheel flats, rail joints, …)
– No curving noise (squeal)
• Primary generating mechanism
– Wheel and rail roughness
• Broadband frequency spectrum
– 250 to 5000 Hz
Existing Wheel-Rail software

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 9
• Analytical model
– Developed by Remington
– Modified to include lateral rail radiation
Structure of the W/R program

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 10
• Roughness: roughness on wheel and rail running surfaces: w and r
• Contact stiffness: to account for local deformations of wheel and rail
under vertical load (FV): KCR and KCW
W/R Noise Software:
Wheel / Rail interaction
RHWA
CRVCWVRVWR
YY
KFrKFwYY
//
Displacements at the point of contact
Derivation
Velocities at the point of contact
RHRVWAWR YYYY....
, , ,
Definition of wheel & rail impedance

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 11
• Definition of wheel and rail impedance [N/ m/s]
– Wheel
• Radial impedance: ZWR
• Axial impedance: ZWA
• Cross-impedance: ZWVH
– Rail
• Vertical impedance: ZRV
• Horizontal impedance: ZRH
• Cross-impedance: ZRVH
W/R Noise Software:
Wheel / Rail interaction
RHHRVHVRH
RVVRV
RHWAHWVHVWA
WRVWR
ZFZFY
ZFY
YZFZFY
ZFY
//
)/(
//
/

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 12
• Vehicle characteristics
– Light rail car
• 6 axles
• 60 tons
– Speed : 50 km/h
• Track characteristics
– Girder rail NP 4 am
– Rail directly fastened every 60 cm to a concrete slab
– A pavement allows the rail to radiate only in the vertical direction
• Measurement
– Distance: 7.5 m from track centerline
W/R Noise Software:
Example: description of a test site
QUIET-TRACK: Track optimisation and monitoring for further noise reduction 13
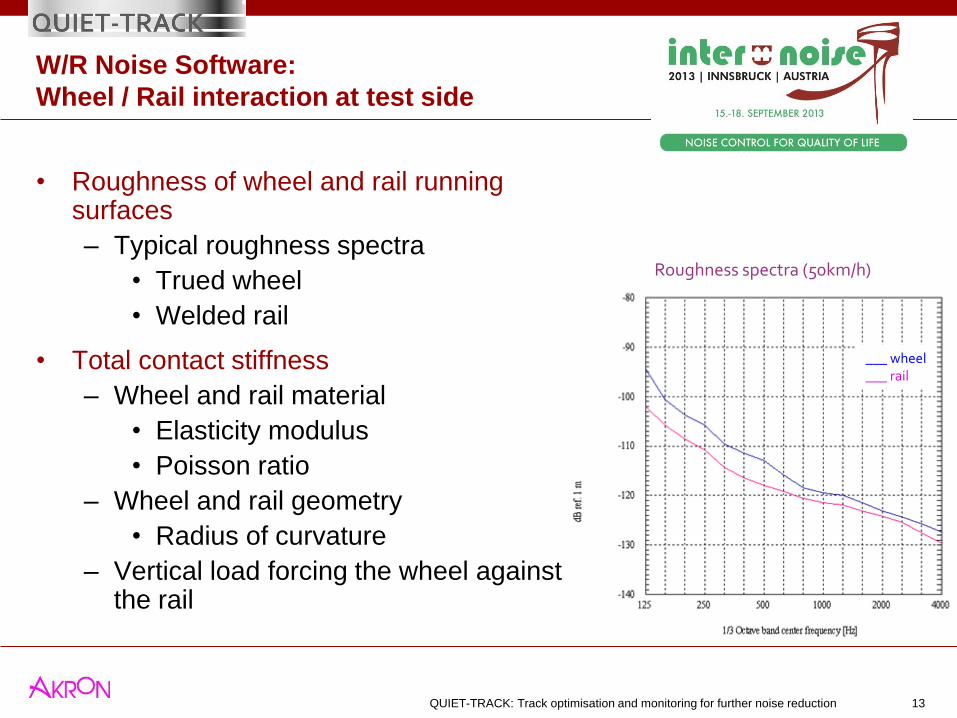
• Roughness of wheel and rail running surfaces
– Typical roughness spectra
• Trued wheel
• Welded rail
• Total contact stiffness
– Wheel and rail material
• Elasticity modulus
• Poisson ratio
– Wheel and rail geometry
• Radius of curvature
– Vertical load forcing the wheel against the rail
W/R Noise Software:
Wheel / Rail interaction at test side
Roughness spectra (50km/h)
___ wheel ___ rail

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 14
• Contact area filter
– Degree of transverse correlation
• Hypothesis: wheel and rail
roughness are well correlated for
two parallel paths in the direction
of rolling
High degree of transverse
correlation
– Contact area radius
• Hertz theory
W/R Noise Software:
Wheel / Rail interaction at test site

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 15
• Rail impedance (vertical, horizontal, cross)
– Measurement of the vertical impedance on
the test track
– Development of a finite element model of
the test track
– Tuning of the model by comparing
measured and calculated vertical
impedance
– Calculation of the horizontal impedance
and cross-impedance
W/R Noise Software:
Rail behaviour (example)
Deformation 1700Hz
Vibration sensor
Load sensor

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 16
• Rail impedance - Results
– Comparison between measured
and calculated vertical
impedance
– Calculated horizontal and cross-
impedance
W/R Noise Software:
Rail behaviour (example)
Admittance = 1 / Impedance
___ horizontal
___ vertical
___ cross – calculated
___ vertical -
measured

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 17
• Measurements on the track
– Vertical and lateral excitation on
the rail with an impact hammer
– Measurement of the rail vibration
at different points in vertical and
lateral direction
– => Vertical and lateral rail
vibration spectra at various
distances from the point of
excitation
W/R Noise Software:
Track decay rate (test site)
Point of excitation
Impact
hammer
1m
1m
Vibration
sensors

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 18
Example: Decay of vertical rail vibration for each frequency band
W/R Noise Software:
Track decay rate (example)
-2dB/m
-4dB/m

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 19
• Wheel impedance
(radial, axial)
– Measurements on a wheel of the
test vehicle
• Radial or axial excitation on the
wheel with an impact hammer
• Measurement of the wheel
vibration in radial or axial
direction
• => Measured radial and axial
admittance
W/R Noise Software:
Wheel behaviour (example)
___ axial ___ radial

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 20
• Sound radiation
– Average vibration response
– Radiating areas
– Radiation efficiencies
• Wheel: radial or axial
• Rail: vertical
• Sound propagation
– Ground reflections
• Sound level cancellation at wavelengths equal to twice the path length difference
• At higher frequencies (> 250Hz)
– Direct sound and reflected sound tend to add as incoherent sources and thus increase the sound level
– A ground effect term is introduced in the propagation equations
W/R Noise Software:
Sound radiation and propagation
___ wheel ___ rail

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 21
• Metro vehicle
– A reference metro vehicle has also been selected and its characteristics have been used to define the reference values of the input parameters.
– This reference vehicle is composed of six cars of 18,2 m each and is partly illustrated in figure below.
W/R Noise Software:
Sensitivity Analysis
Parameter Reference value Alternatives
Length of the vehicle [m] 109 -
Number of axles 24 - Axle load [T] 12 10 – 11 – 13 – 14
Vehicle speed [km/h] 80 60 – 100 Type of wheel solid wheel -

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 22
W/R Noise Software:
Wheel roughness

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 23
W/R Noise Software:
Data related to the track
Parameter Reference value Alternatives
Sleeper
Elasticity modulus [MPa] 18 000 -
Poisson’s ratio 0,3 -
Density [kg/m³] 1 000 -
Loss factor [%] 8 -
Dimensions [mm] 2 600 x 240 x 140 -
Distance between sleepers [m] 0,60 -
Ballast
Loss factor [%] 60 -
Dynamic stiffness [kN/mm/sleeper] 25 -
Rail
Type RATP 52 EB50T, Np4am, 35G
Loss factor [%] 2 -
Rail pad
Loss factor [%] 25 10 – 50
Dynamic stiffness [kN/mm] 150 -

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 24
W/R Noise Software:
Finite Element Model

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 25
W/R Noise Software:
Results
Sleeper Rail Wheel TOTAL
Vehicle speed60km/h 68,25 73,23 73,90 77,18
80km/h 71,92 77,84 77,86 81,38
100km/h 74,48 81,10 81,01 84,52
Axle load10T/axle 72,15 78,23 78,29 81,77
11T/axle 72,03 78,03 78,06 81,57
12T/axle 71,92 77,84 77,86 81,38
13T/axle 71,80 77,65 77,67 81,20
14T/axle 71,69 77,48 77,49 81,03
Rail pad loss factor10% 74,36 80,62 77,77 83,07
25% 71,92 77,84 77,86 81,38
50% 70,21 75,96 78,00 80,53
Wheel and rail roughnessRail A Wheel B -5dB 65,15 71,30 71,23 74,78
Rail B Wheel B -5dB 66,92 72,84 72,86 76,38
Rail A Wheel B 69,41 75,68 75,55 79,12
Rail C Wheel B -5dB 70,04 75,72 75,85 79,34
Rail B Wheel B 70,15 76,30 76,23 79,78
Rail C Wheel B 71,92 77,84 77,86 81,38
Rail D Wheel B 75,04 80,72 80,85 84,34
Rail C Wheel B +5dB 75,15 81,30 81,23 84,78
Rail D Wheel B +5dB 76,92 82,84 82,86 86,38
Rail E Wheel B 79,23 84,75 84,95 88,42
Rail E Wheel B +5dB 80,04 85,72 85,85 89,34
Rail F Wheel B 83,94 89,40 89,62 93,09
Rail F Wheel B +5dB 84,23 89,75 89,95 93,42
Rail typeEB50T 71,89 77,77 77,84 81,34
RATP52 71,92 77,84 77,86 81,38

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 26
W/R Noise Software:
Results
Parameter Parameter giving the
lowest noise level
Parameter giving the
highest noise level
Variation of rolling
noise in dB
Vehicle speed 60 km/h 100 km/h 7,3
Axle load 10 T 14 T 0,7
Rail pad loss factor 50% 10% 2,5
Wheel or rail roughness Smooth Rough 15
Type of rail EB50T RATP 52 0,04

QUIET-TRACK: Track optimisation and monitoring for further noise reduction 27
W/R Noise Software:
Results
Parameter Parameter giving the
lowest noise level
Parameter giving the
highest noise level
Variation of rolling
noise in dB
Vehicle speed 80 km/h 160 km/h 9,4
Axle load 12 500kg 5 000kg 1,1
Track type “Bi-block” Holz 3,1
Rail pad loss factor 50% 10% 2,6
Wheel roughness Smooth Rough 8,5
Rail roughness Smooth Rough 3,9
Type of rail UIC 54 E UIC 60 0,7