Embed Size (px)
Citation preview

QUARTERLY OF APPLIED MATHEMATICS
VOLUME LXIX, NUMBER 3
SEPTEMBER 2011, PAGES 477–507
S 0033-569X(2011)01237-7
Article electronically published on May 10, 2011
UNILATERAL DYNAMIC CONTACT
OF TWO VISCOELASTIC BEAMS
By
ALESSIA BERTI (Dipartimento di Matematica, Facolta di Ingegneria, Universita degli Studi diBrescia, Via Valotti 9, 25133 Brescia, Italia)
and
MARIA GRAZIA NASO (Dipartimento di Matematica, Facolta di Ingegneria, Universita degli Studidi Brescia, Via Valotti 9, 25133 Brescia, Italia)
Abstract. This work is focused on a dynamic unilateral contact problem between two
viscoelastic beams. Global-in-time existence of weak solutions describing the dynamics
of the system is established. In addition, asymptotic longtime behavior of weak solutions
is discussed: it is shown that the energy solutions decay exponentially to zero under
suitable decay properties of the memory kernels.
1. Introduction. In this paper we analyze the mechanical problem modeling the
evolution of two viscoelastic beams in unilateral contact across a joint. The longitudinal
axes of the beams coincide with the intervals [0, l0] and [l0, l], respectively. Let 0 < T ≤∞. Denoting by u = u(x, t) : (0, l0)× (0, T ) → R and v = v(x, t) : (l0, l)× (0, T ) → R the
vertical deflection of the first and second beam, respectively, from their configuration at
rest, under the assumption of small displacements, the motion can be described by the
following equations (see, e.g., [14, 23, 37]):
utt(x, t) + γ1 uxxxx(x, t)−∫ t
0
g1(t− τ ) uxxxx(x, τ ) dτ = 0 in (0, l0)× (0, T ),
vtt(x, t) + γ2 vxxxx(x, t)−∫ t
0
g2(t− τ ) vxxxx(x, τ ) dτ = 0 in (l0, l)× (0, T ).
(1.1)
Here γi, i = 1, 2, are positive constants while the memory kernels gi, i = 1, 2, are
nonnegative absolutely continuous nonincreasing functions on [0,+∞) such that
γi −∫ ∞
0
gi(τ ) dτ > 0, i = 1, 2.
Received December 4, 2009.2000 Mathematics Subject Classification. Primary 74H40, 74M15, 35B40.Key words and phrases. Viscoelastic beam, Signorini condition, contact, asymptotic behavior.E-mail address: [email protected] address: [email protected]
c©2011 Brown University
477
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

478 A. BERTI AND M.G. NASO
The initial conditions read
u(x, 0) = u0(x), ut(x, 0) = u1(x) in (0, l0),
v(x, 0) = v0(x), vt(x, 0) = v1(x) in (l0, l),(1.2)
for some given functions u0, u1 : (0, l0) → R and v0, v1 : (l0, l) → R. System (1.1) is
supplemented with the clamped boundary conditions at x = 0 and x = l:
u(0, t) = 0, ux(0, t) = 0 in (0, T ),
v(l, t) = 0, vx(l, t) = 0 in (0, T ).(1.3)
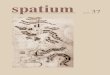
The joint at x = l0 is modeled with the classical Signorini nonpenetration condition (see,
e.g., [10, 19, 21]). In particular, the joint with gap d is asymmetrical so that d = d1+d2,
where d1 > 0 and d2 > 0 are, respectively, the upper and lower clearance, when the
system is at rest (see Fig. 1).
Then, the right end of the left beam is assumed to be within the clearance of the left
end of the right beam, namely
v(l0, t)− d2 ≤ u(l0, t) ≤ v(l0, t) + d1 in (0, T ). (1.4)
0 xl
d1
d2 l0
Fig. 1. The two beams and the joint at x = l0 with clearance d =d1 + d2
In addition to (1.4), we assume that the stresses at the joint are equal; namely,
σ(t) := σ1(l0, t) = σ2(l0, t) in (0, T ), (1.5)
where
σ1(l0, t) = −γ1 uxxx(l0, t) +
∫ t
0
g1(t− τ ) uxxx(l0, τ ) dτ,
σ2(l0, t) = −γ2 vxxx(l0, t) +
∫ t
0
g2(t− τ ) vxxx(l0, τ ) dτ.
Moreover, we prescribe
−σ(t) ∈ ∂χv(l0,t)(u(l0, t)) in (0, T ), (1.6)
where ∂χv denotes the subdifferential of the indicator function χv,
χv(φ) =
⎧⎨⎩0, if v − d2 ≤ φ ≤ v + d1,
+∞, otherwise;
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 479
namely,
∂χv(φ) =
⎧⎪⎪⎪⎨⎪⎪⎪⎩(−∞, 0] if φ = v − d2,
0 if v − d2 < φ < v + d1,
[0,+∞) if φ = v + d1.
Let us explain the condition expressed by (1.6). When v(l0, t)−d2 < u(l0, t) < v(l0, t)+d1is verified, there is no contact, the ends at x = l0 are free, and σ(t) = 0. On the other
hand, when v(l0, t) − d2 = u(l0, t) or u(l0, t) = v(l0, t) + d1, the ends at x = l0 are
in contact. More precisely, when contact occurs at the lower end, relations v(l0, t) −d2 = u(l0, t) and σ(t) ≥ 0 hold; when contact takes place at the upper end, relations
u(l0, t) = v(l0, t) + d1 and σ(t) ≤ 0 are satisfied.
Finally, we suppose that the ends, evaluated at x = l0, do not exert moments on each
other; namely,
γ1 uxx(l0, t)−∫ t
0
g1(t− τ ) uxx(l0, τ ) dτ = 0 in (0, T ),
γ2 vxx(l0, t)−∫ t
0
g2(t− τ ) vxx(l0, τ ) dτ = 0 in (0, T ).
(1.7)
Questions related to the modeling, well-posedness and longtime behavior of systems in
contact have drawn considerable attention in recent years. Some applications of unilateral
multibody dynamics can be found in, e.g., [36, 45]. A substantial contribution to the
mathematical theory of contact mechanics, which is concerned with the mathematical
modeling and analysis of the many aspects of contact between deformable bodies, has
been given by several authors (see, e.g., [2, 11, 15, 18, 38, 41, 42, 44] and the references
therein). A first line of research is the mathematical formulation of the models leading
to systems of partial differential equations that are worth analyzing also in respect to
existence results, uniqueness, regularity of the solutions (see, e.g., [1, 12, 20, 22, 40]) or in
respect to its numerical analysis (see, e.g., [6, 7, 8, 39]). Another area of interest concerns
the study of the energy decay related to the contact system. Several works appeared over
the years that dealt with the longtime behavior of the solutions in viscoelasticity (see,
e.g., [9, 13, 17, 24, 25, 35]) via Laplace transform methods, semigroup techniques or direct
energy estimates. The asymptotic behavior of contact problems involving only a single
displacement and/or a single variation of temperature, have been studied extensively
(see, e.g., [16, 26, 27, 30, 31, 32, 33, 34]). Concerning the energy decay for dynamic
contact between two bodies we recall some results contained in [3, 4, 5, 28].
The focus of the present paper is on a global-in-time existence result for problem (1.1)–
(1.7) and associated uniform stability questions. As is usual in mechanical problems with
unilateral constraints, we cannot expect classical solutions because of the possible velocity
discontinuity upon impact. So we look for weak solutions (see Definition 2.1). Therefore,
we consider an approximate version of the problem (1.1)–(1.7) by introducing viscosity
terms and a normal compliance condition (Remark 4.1 below) as regularization of the
Signorini condition (1.6). Then, we prove a well-posedness result for the approximate
problem by means of a Faedo-Galerkin method (Proposition 4.2), we derive suitable a
priori estimates and we pass to the limit in the regularization parameter obtaining the
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

480 A. BERTI AND M.G. NASO
existence of a solution to the original problem (Theorem 2.2). The uniqueness of the
solution to the limit problem remains an open issue (Remark 5.1 below).
Once a global-in-time existence result for system (1.1)–(1.7) is established, a natu-
ral question to ask is that of asymptotic stability. The dissipative mechanism in the
model is exhibited by the memory component of the system. The main goal of this pa-
per is to show the exponential stability of a solution to the problem (1.1)–(1.7) as time
goes to infinity (see Theorem 2.3) under the assumption that the memory functions gi,
i = 1, 2, decay exponentially as time goes to infinity. First, we work in the penalized
framework: we prove the exponential decay for the penalized solution by introducing a
suitable Lyapunov functional and by using the multiplier method. The weight functions
in the Lyapunov functional are crucial in handing the boundary terms, as well as in
controlling the norm of the solution (cf. Lemmas 6.2–6.3). Subsequently, by weak lower
semicontinuity arguments, the exponential decay for a solution to the original problem
is achieved. That is, we show that there exists one solution, of system (1.1)–(1.7), orig-
inating from the above-mentioned approximation procedure, that decays exponentially
as time goes to infinity.
The plan of the paper is as follows. In Section 2, we enlist all of the assumptions on
the problem data and state our results. Section 3 is devoted to some preliminary results
that we will use in the following sections. In Section 4, we dwell on the model with the
normal compliance condition, considered as a regularization of the Signorini condition,
establishing the existence and the uniqueness of its solution. The proof of the existence
of a weak solution to (1.1)–(1.7) and the study of its asymptotic behavior are carried out
in Section 5 and Section 6, respectively.
2. Main results. In order to proceed with the exposition of our results, we introduce
some notation and definitions.
To obtain a precise formulation of the problem, we introduce the following functional
spaces:
V1 = {ϕ ∈ H2(0, l0) : ϕ(0) = ϕx(0) = 0},
V2 = {ϕ ∈ H2(l0, l) : ϕ(l) = ϕx(l) = 0},
and the convex set of admissible pairs of displacements (u, v):
K = {(ϕ1, ϕ2) ∈ V1 × V2 : ϕ2(l0)− d2 ≤ ϕ1(l0) ≤ ϕ2(l0) + d1},
incorporating the constraint (1.4).
We now enlist our assumptions on the problem data:
(u0, v0) ∈ K, (2.1)
(u1, v1) ∈ L2(0, l0)× L2(l0, l). (2.2)
Definition 2.1. Let 0 < T ≤ ∞. Let u0, v0, u1, v1 be given as in (2.1)–(2.2). A
couple (u, v) is a weak solution to problem (1.1)–(1.7) when
(u, v) ∈ W 1,∞ (0, T ;L2(0, l0)× L2(l0, l)
)∩ L∞ (0, T ;K)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 481
and satisfies the relation∫ T
0
∫ l0
0
{[−ut(x, t)[wt(x, t)− ut(x, t)]
+
[γ1uxx(x, t)−
∫ t
0
g1(t− τ ) uxx(x, τ ) dτ
][wxx(x, t)− uxx(x, t)]
}dx dt
+
∫ T
0
∫ l
l0
{− vt(x, t)[zt(x, t)− vt(x, t)]
+
[γ2vxx(x, t)−
∫ t
0
g2(t− τ ) vxx(x, τ ) dτ
][zxx(x, t)− vxx(x, t)]
}dx dt
≥∫ l0
0
u1(x)[w(x, 0)− u0(x)] dx+
∫ l
l0
v1(x)[z(x, 0)− v0(x)] dx, (2.3)
for every (w, z) ∈ W 1,∞ (0, T ;L2(0, l0)× L2(l0, l)
)∩ L∞ (0, T ;K) such that w(·, T ) =
u(·, T ) and z(·, T ) = v(·, T ).Henceforth, we suppose that
(H.1) the memory kernels gi, i = 1, 2, are nonnegative absolutely continuous nonincreas-
ing functions on [0,+∞) such that
γi −∫ ∞
0
gi(τ ) dτ > 0, i = 1, 2.
For any t ≥ 0 and i = 1, 2, we let
Gi(t) := γi −∫ t
0
gi(τ ) dτ and G∞i := γi −
∫ ∞
0
gi(τ ) dτ.
From (H.1) we have
0 < G∞i < Gi(t) ≤ γi.
The main result pertaining to global-in-time existence of solutions is the following:
Theorem 2.2 (Global in time existence). Let 0 < T ≤ ∞. Under assumptions (2.1)–
(2.2) and (H.1), there exists a weak solution (in the sense of Definition 2.1) of problem
(1.1)–(1.7).
The proof of this result will be carried out in Section 5, by a regularization, a priori
estimates, and passage to the limit procedure.
Next, in Section 6, we investigate the asymptotic behavior of the weak solutions pro-
vided by Theorem 2.2. For this purpose, we suppose that the memory kernels gi, i = 1, 2,
satisfying assumption (H.1), decay exponentially to zero, as t → +∞:
− αi gi(t) ≤ g′i(t) ≤ −βi gi(t), (H.2)
|g′′i (t)| ≤ κi gi(t), (H.3)
for any t ≥ 0 and with αi, βi, κi strictly positive constants.
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

482 A. BERTI AND M.G. NASO
We define by
E(t, u, v) =1
2
∫ l0
0
[|ut(x, t)|2 +G1(t)|uxx(x, t)|2 + (g1�uxx)(x, t)
]dx
+1
2
∫ l
l0
[|vt(x, t)|2 +G2(t)|vxx(x, t)|2 + (g2�vxx)(x, t)
]dx (2.4)
the energy associated with system (1.1)–(1.7), with the operator � as introduced in (3.1).
We now establish in the following theorem that E(t, u, v) decays exponentially to zero,
as t → +∞.
Theorem 2.3 (Exponential decay). Let T = ∞. Assume hypotheses (H.1)–(H.3). Let
(u, v) be a weak solution of problem (1.1)–(1.7). Then, there exist two positive constants
M and μ, independent of t, such that
for all t ≥ 0, E(t, u, v) ≤ M E(0, u, v) e−μt. (2.5)
3. Preliminaries. Before proceeding, let us collect here some properties which will
be useful in that follows. Denoting by
(k ∗ w)(t) :=∫ t
0
k(t− τ )w(τ ) dτ
the convolution product, and introducing the following notation:
(k�w)(t) :=
∫ t
0
k(t− τ ) |w(t)− w(τ )|2 dτ, (3.1)
(k w)(t) :=∫ t
0
k(t− τ ) [w(τ )− w(t)] dτ,
it is apparent that the equalities
(k ∗ w)(t) =[∫ t
0
k(τ ) dτ
]w(t)− (k w)(t),
(k ∗ w)t(t) = k(0)w(t) + (k′ ∗ w)(t) = k(t)w(t)− (k′ w)(t)(3.2)
hold, with (·)′ = d(·)/dt and (·)t = ∂(·)/∂t. We now recall some lemmas used in the
sequel (for more details see, e.g., [25, 29]). The former two are a consequence of the
above definitions and of differentiation of the term k�w.
Lemma 3.1. For any function k ∈ C(R) and any w ∈ W 1,2(0, T ) we have that
(k ∗ w)(t) = (k w)(t) +[∫ t
0
k(τ ) dτ
]w(t).
Lemma 3.2. For any function k ∈ C1(R) and any w ∈ W 1,2(0, T ) we have that
(k ∗ w)(t) wt(t) = − 1
2k(t) |w(t)|2 + 1
2(k′�w)(t)
− 1
2
d
dt
{(k�w)(t)−
[∫ t
0
k(τ ) dτ
]|w(t)|2
}.
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 483
Lemma 3.3. For any function k ∈ C(R) and any w ∈ W 1,2(0, T ) we have that
|(k w)(t)|2 ≤[∫ T
0
|k(τ )| dτ](|k|�w)(t).
Lemma 3.4. Let H be a Hilbert space. For any functions k ∈ C(R), w ∈ W 1,2(0, T ),
f ∈ H, and for any ε > 0, there exists a positive constant Cε such that
|f(t) (k w)(t)| ≤ ε|f(t)|2 + Cε(|k|�w)(t) .
In addition, we recall that, by the Sobolev embedding theorem, the continuous injec-
tions hold,
H1(0, l0) ↪→ C0,1/2([0, l0]), H1(l0, l) ↪→ C0,1/2([l0, l]),
and, in particular, there exists a positive constant CS such that
‖w‖C0([0,l0]) ≤ CS‖w‖H1(0,l0), ∀w ∈ H1(0, l0),
‖w‖C0([l0,l]) ≤ CS‖w‖H1(l0,l), ∀w ∈ H1(l0, l).(3.3)
Finally, for the sake of simplicity, we will employ the same symbols C for different
constants, even in the same formula.
4. Penalized problem. To show an existence result for the problem (1.1)–(1.7), we
approximate (1.1)–(1.7) by a penalization procedure and we prove well-posedness for the
regularized problem.
We introduce the families of initial data {uε0}ε>0, {uε
1}ε>0, {vε0}ε>0, {vε1}ε>0, satisfying
(uε0, v
ε0) ∈ [H4(0, l0)×H4(l0, l)] ∩ K and (uε
1, vε1) ∈ V1 × V2. (4.1)
For any ε > 0, we consider the differential equations
uεtt(x, t) + γ1u
εxxxx(x, t)− (g1 ∗ uε
xxxx)(x, t) = 0 in (0, l0)× (0, T ),
vεtt(x, t) + γ2vεxxxx(x, t)− (g2 ∗ vεxxxx)(x, t) = 0 in (l0, l)× (0, T ).
(4.2)
The boundary conditions at x = 0 and x = l are
uε(0, t) = 0, uεx(0, t) = 0 in (0, T ),
vε(l, t) = 0, vεx(l, t) = 0 in (0, T ).(4.3)
Furthermore, at the joint x = l0, for t ∈ (0, T ) we let
σε1(l0, t) = −γ1 uxxx(l0, t) + (g1 ∗ uxxx)(l0, t),
σε2(l0, t) = −γ2 vxxx(l0, t) + (g2 ∗ vxxx)(l0, t),
σε(t) := σε1(l0, t) = σε
2(l0, t),
(4.4)
where
σε(t) =− 1
ε{[uε(l0, t)− vε(l0, t)− d1]
+ − [vε(l0, t)− uε(l0, t)− d2]+}
− ε[uεt (l0, t)− vεt (l0, t)], (4.5)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

484 A. BERTI AND M.G. NASO
andγ1 u
εxx(l0, t)− (g1 ∗ uε
xx)(l0, t) = 0,
γ2 vεxx(l0, t)− (g2 ∗ vεxx)(l0, t) = 0.
(4.6)
Here and in the sequel, [f ]+ := max{f, 0} denotes the positive part of f . The initial
conditions areuε(x, 0) = uε
0(x), uεt (x, 0) = uε
1(x) in (0, l0),
vε(x, 0) = vε0(x), vεt (x, 0) = vε1(x) in (l0, l).(4.7)
Remark 4.1. Assuming (4.5), we are considering a normal compliance condition (see,
e.g., [4, 21, 22, 28]) as a regularization of the Signorini contact condition (1.6). Actually,
we relax the nonpenetration condition by assuming for instance that the stops at the left
end of the right beam are flexible. As ε → 0, we recover formally the constraint (1.4) and
the condition (1.6). Moreover, let us stress that the viscosity term −ε [uεt (l0, t)− vεt (l0, t)]
(introduced in [28]) will play a crucial role in the proof of the uniqueness of the approx-
imating solution (see Proposition 4.3 below).
We now state existence and uniqueness results related to the penalized problem (4.2)–
(4.7).
Proposition 4.2 (Existence of an approximating solution). Let (H.1) hold. Then, for
each ε > 0 and T > 0, problem (4.2)–(4.7) has a solution
(uε, vε) ∈ W 2,∞ (0, T ;L2(0, l0)× L2(l0, l)
)∩W 1,∞ (
0, T ;H2(0, l0)×H2(l0, l))
∩ L∞ (0, T ;H4(0, l0)×H4(l0, l)
), (4.8)
with initial data satisfying (4.7)–(4.1) and compatible with the boundary conditions
(4.3)–(4.6) for t = 0.
Proof. The existence of a solution to problem (4.2)–(4.7) is shown by means of the
Faedo-Galerkin scheme.
Construction of Faedo-Galerkin approximations: Let {wj}j∈N and {zj}j∈N be bases of
V1,V2 such that uε0, u
ε1 ∈ span{w1, w2} and vε0, v
ε1 ∈ span{z1, z2}. For any n ∈ N, let us
denote by
un(x, t) =n∑
j=1
hnj (t)wj(x), vn(x, t) =
n∑j=1
knj (t) zj(x)
the solutions of the following system:∫ l0
0
{untt(x, t)wj(x) + [γ1u
nxx(x, t)− (g1 ∗ un
xx)(x, t)]wjxx(x)} dx− σn(t)wj(l0) = 0, (4.9)
∫ l
l0
{vntt(x, t)zj(x) + [γ2vnxx(x, t)− (g2 ∗ vnxx)(x, t)]zjxx(x)} dx+ σn(t)zj(l0) = 0, (4.10)
for j = 1, . . . , n, where
σn(t) =− 1
ε{[un(l0, t)− vn(l0, t)− d1]
+ − [vn(l0, t)− un(l0, t)− d2]+}
− ε[unt (l0, t)− vnt (l0, t)]
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 485
and
un(x, 0) = uε0(x), un
t (x, 0) = uε1(x),
vn(x, 0) = vε0(x), vnt (x, 0) = vε1(x).(4.11)
Existence of Galerkin approximations : System (4.9)–(4.10) appended by initial condi-
tions (4.11) admits a local solution, and the a priori estimates derived below show that
this solution can be extended to (0, T ), for any T > 0.
A priori estimates: In order to extend the local solution to (0, T ), we establish some
a priori estimates independent of n. By differentiating equations (4.9) and (4.10) with
respect to t, we obtain∫ l0
0
{unttt(x, t)wj(x) + [γ1u
ntxx(x, t)− (g1 ∗ un
txx)(x, t)− g1(t)un0xx(x)]wjxx(x)} dx
− σnt(t)wj(l0) = 0,∫ l
l0
{vnttt(x, t)zj(x) + [γ2vntxx(x, t)− (g2 ∗ vntxx)(x, t)− g2(t)v
n0xx(x)]zjxx(x)} dx
+ σnt(t) zj(l0) = 0,
for j = 1, . . . , n. We multiply the first equation by hnj tt
, the second one by knj ttand we
add the resulting equations. Thus, summing up over j = 1, . . . , n, we have∫ l0
0
{unttt(x, t)u
ntt(x, t) + [γ1u
ntxx(x, t)− (g1 ∗ un
txx)(x, t)− g1(t)un0xx(x)]u
nttxx(x, t)} dx
+
∫ l
l0
{vnttt(x, t)vntt(x, t) + [γ2vntxx(x, t)− (g2 ∗ vntxx)(x, t)− g2(t)v
n0xx(x)]v
nttxx(x, t)} dx
+1
εBn(t)[un
tt(l0, t)− vntt(l0, t)] + ε[untt(l0, t)− vntt(l0, t)]
2 = 0,
with Bn(t) defined as
Bn(t) :=d
dt{[un(l0, t)− vn(l0, t)− d1]
+ − [vn(l0, t)− un(l0, t)− d2]+}.
The energy functional introduced in (2.4) and Lemma 3.2 imply
d
dt
[E(t, un
t , vnt )− g1(t)
∫ l0
0
un0xx(x)u
ntxx(x, t) dx− g2(t)
∫ l
l0
vn0xx(x)vntxx(x, t) dx
]
=1
2
{∫ l0
0
[(g′1�un
txx)(x, t)− g1(t)|untxx(x, t)|2
]dx
+
∫ l
l0
[(g′2�vntxx)(x, t)− g2(t)|vntxx(x, t)|2
]dx
}
− g′1(t)
∫ l0
0
un0xx(x)u
ntxx(x, t) dx− g′2(t)
∫ l
l0
vn0xx(x)vntxx(x, t) dx
− 1
εBn(t)[un
tt(l0, t)− vntt(l0, t)]− ε[untt(l0, t)− vntt(l0, t)]
2.
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

486 A. BERTI AND M.G. NASO
As in [4, Proposition 3.2], by applying Young and Sobolev inequalities, we can estimate
1
ε|Bn(t)||un
tt(l0, t)− vntt(l0, t)| ≤ε
2|un
tt(l0, t)− vntt(l0, t)|2
+ C
[∫ l0
0
|untxx(x, t)|2 dx+
∫ l
l0
|vntxx(x, t)|2 dx].
Denoting by
M(t, unt , v
nt ) :=E(t, un
t , vnt )− g1(t)
∫ l0
0
|un0xx(x)u
ntxx(x, t)| dx
− g2(t)
∫ l
l0
|vn0xx(x)vntxx(x, t)| dx, (4.12)
an integration over (0, t) leads to
M(t, unt , v
nt ) ≤M(0, un
t , vnt )
− 1
2
∫ t
0
g′1(τ )
[∫ l0
0
|un0xx(x)|
2 dx+
∫ l0
0
|untxx(x, τ )|
2 dx
]dτ
− 1
2
∫ t
0
g′2(τ )
[∫ l
l0
|vn0xx(x)|2 dx+
∫ l
l0
|vntxx(x, τ )|2 dx
]dτ
+ C
∫ t
0
[∫ l0
0
|untxx(x, τ )|2 dx+
∫ l
l0
|vntxx(x, τ )|2 dx]dτ. (4.13)
By considering (4.12), the Holder and Young inequalities and assumptions (H.1) yield
1
2E(t, un
t , vnt )−
[g1(t)]2
G1(t)
∫ l0
0
|uε0xx(x)|2 dx− [g2(t)]
2
G2(t)
∫ l
l0
|vε0xx(x)|2 dx ≤ M(t, unt , v
nt )
≤ 3
2E(t, un
t , vnt ) +
[g1(t)]2
G1(t)
∫ l0
0
|uε0xx(x)|2 dx+
[g2(t)]2
G2(t)
∫ l
l0
|vε0xx(x)|2 dx. (4.14)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 487
By (4.13)–(4.14), we find
1
2E(t, un
t , vnt ) ≤ M(t, un
t , vnt ) +
[g1(t)]2
G1(t)
∫ l0
0
|uε0xx(x)|2 dx+
[g2(t)]2
G2(t)
∫ l
l0
|vε0xx(x)|2 dx
≤ 3
2E(0, un
t , vnt ) +
[g1(0)]2
γ1
∫ l0
0
|uε0xx(x)|2 dx+
[g2(0)]2
γ2
∫ l
l0
|vε0xx(x)|2 dx
− 1
2
∫ t
0
g′1(τ )
[∫ l0
0
|un0xx(x)|
2dx+
∫ l0
0
|untxx(x, τ )|
2dx
]dτ
− 1
2
∫ t
0
g′2(τ )
[∫ l
l0
|vn0xx(x)|2 dx+
∫ l
l0
|vntxx(x, τ )|2 dx
]dτ
+[g1(t)]
2
G1(t)
∫ l0
0
|uε0xx(x)|2 dx+
[g2(t)]2
G2(t)
∫ l
l0
|vε0xx(x)|2 dx
+ C
∫ t
0
[∫ l0
0
|untxx(x, τ )|2 dx+
∫ l
l0
|vntxx(x, τ )|2 dx]dτ.
Then, there exist two positive constants C1 and C2 such that
E(t, unt , v
nt ) ≤ C1 E(0, un
t , vnt )− C2
∫ t
0
[g′1(τ ) + g′2(τ )] E(τ, unt , v
nt ) dτ
+ C
∫ t
0
[∫ l0
0
|untxx(x, τ )|2 dx+
∫ l
l0
|vntxx(x, τ )|2 dx]dτ.
We now prove that the second-order energy is bounded initially, i.e. that
E(0, unt , v
nt ) =
1
2
{∫ l0
0
[|un
tt(x, 0)|2 + γ1|uε0xx(x)|2
]dx
+
∫ l
l0
[|vntt(x, 0)|2 + γ2|vε0xx(x)|2
]dx
}is bounded independently of n. To this aim, we will take advantage of the special bases
chosen above, containing the initial data. In fact, we multiply (4.9) by hnjtt, we sum up
over j and we let t → 0. Hence, we have∫ l0
0
[|un
tt(x, 0)|2 + γ1uε0xx(x)u
nttxx(x, 0)
]dx− σn(0)un
tt(l0, 0) = 0.
Integrating by parts and owing to the compatibility conditions (4.3)–(4.6) for t = 0 lead
to ∫ l0
0
[|un
tt(x, 0)|2 + γ1uε0xxxx(x)u
ntt(x, 0)
]dx = 0.
Therefore, in view of the Holder and Young inequalities, we obtain∫ l0
0
|untt(x, 0)|2 dx ≤ C
∫ l0
0
|uε0xxxx(x)|2 dx; (4.15)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

488 A. BERTI AND M.G. NASO
namely, untt(x, 0) is bounded in L2(0, l0). Similarly, we find∫ l
l0
|vntt(x, 0)|2 dx ≤ C
∫ l
l0
|vε0xxxx(x)|2 dx, (4.16)
which implies that E(0, unt , v
nt ) is bounded independently of n. Thus, by applying the
Gronwall inequality, we deduce that E(t, unt , v
nt ) is bounded in [0, T ].
Passage to the limit: The boundedness of E(t, unt , v
nt ) guarantees that
un is bounded in W 2,∞ (0, T ;L2(0, l0)
)∩W 1,∞ (
0, T ;H2(0, l0)),
vn is bounded in W 2,∞ (0, T ;L2(l0, l)
)∩W 1,∞ (
0, T ;H2(l0, l)).
Therefore we deduce, up to a subsequence, the convergences
un ∗⇀ uε in W 2,∞ (
0, T ;L2(0, l0))∩W 1,∞ (
0, T ;H2(0, l0)),
vn∗⇀ vε in W 2,∞ (
0, T ;L2(l0, l))∩W 1,∞ (
0, T ;H2(l0, l)).
In view of a generalized version of Ascoli’s theorem (see, e.g., [43]), the following strong
convergences hold:
un → uε in C1(0, T ;H2−s(0, l0)
), s > 0,
vn → vε in C1(0, T ;H2−s(l0, l)
), s > 0.
Thus, the existence of a solution is achieved, by letting n → ∞. In particular, from
(4.2)1 it follows that
γ1‖uεxxxx(x, t)‖L2(0,l0) ≤ ‖uε
tt(x, t)‖L2(0,l0) +
∫ t
0
g1(t− τ )‖uεxxxx(x, τ )‖L2(0,l0) dτ.
Recalling (H.1), this implies that
‖uεxxxx(x, t)‖L∞(0,T ;L2(0,l0)) ≤
1
G∞1
‖uεtt(x, t)‖L2(0,l0).
Then, uεxxxx ∈ L∞ (
0, T ;L2(0, l0)). Similarly, vεxxxx ∈ L∞ (
0, T ;L2(l0, l)). �
Proposition 4.3 (Uniqueness of the approximating solution). Let (H.1) hold. Then,
given T > 0 for each ε > 0, the solution (uε, vε) to problem (4.2)–(4.7), with initial data
satisfying (4.7)–(4.1) and compatible with the boundary conditions (4.3)–(4.6) for t = 0,
is unique.
Proof. Let (uε, vε, ) and (wε, zε) be two solutions of (4.2)–(4.7) whose regularity is
specified by (4.8). Then
(uε, vε) := (uε − wε, vε − zε)
satisfies
uεtt(x, t) + γ1u
εxxxx(x, t)− (g1 ∗ uε
xxxx)(x, t) = 0 in (0, l0)× (0, T ),
vεtt(x, t) + γ2vεxxxx(x, t)− (g2 ∗ vεxxxx)(x, t) = 0 in (l0, l)× (0, T ),
(4.17)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 489
with
uε(0, t) = 0, uεx(0, t) = 0 in (0, T ),
vε(l, t) = 0, vεx(l, t) = 0 in (0, T ),(4.18)
γ1 uεxx(l0, t)− (g1 ∗ uε
xx)(l0, t) = 0 in (0, T ),
γ2 vεxx(l0, t)− (g2 ∗ vεxx)(l0, t) = 0 in (0, T ),
(4.19)
and
σε(t) := σε1(l0, t) = σε
2(l0, t) in (0, T ), (4.20)
where
σε1(l0, t) = − γ1 uxxx(l0, t) + (g1 ∗ uxxx)(l0, t),
σε2(l0, t) = − γ2 vxxx(l0, t) + (g2 ∗ vxxx)(l0, t),
σε(t) =− 1
ε{[uε(l0, t)− vε(l0, t)− d1]
+ − [vε(l0, t)− uε(l0, t)− d2]+}
+1
ε{[wε(l0, t)− zε(l0, t)− d1]
+ − [zε(l0, t)− wε(l0, t)− d2]+}
− ε[uεt (l0, t)− vεt (l0, t)]. (4.21)
The initial conditions are
uε(x, 0) = 0, uεt (x, 0) = 0 in (0, l0),
vε(x, 0) = 0, vεt (x, 0) = 0 in (l0, l).(4.22)
Multiplying (4.17)1 by uεt in L2(0, l0), (4.17)2 by vεt in L2(l0, l), respectively, and summing
up, we find
d
dtEε(t) =
1
2
∫ l0
0
[(g′1�un
xx)(x, t)− g1(t)|unxx(x, t)|2
]dx
+1
2
∫ l
l0
[(g′2�vnxx)(x, t)− g2(t)|vnxx(x, t)|2
]dx+ σε(t) [uε
t (l0, t)− vεt (l0, t)]
=1
2
∫ l0
0
[(g′1�un
xx)(x, t)− g1(t)|unxx(x, t)|2
]dx
+1
2
∫ l
l0
[(g′2�vnxx)(x, t)− g2(t)|vnxx(x, t)|2
]dx− ε [uε
t (l0, t)− vεt (l0, t)]2
− 1
ε
{[uε(l0, t)− vε(l0, t)− d1]
+ − [vε(l0, t)− uε(l0, t)− d2]+
− [wε(l0, t)− zε(l0, t)− d1]++ [zε(l0, t)− wε(l0, t)− d2]
+}
× [uεt (l0, t)− vεt (l0, t)] , (4.23)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

490 A. BERTI AND M.G. NASO
where, according to (2.4), Eε(t) := E(t, uε, θε, vε, ϕε). As in the proof of [4, Propo-
sition 3.2], we now estimate the last term on the right-hand side of (4.23). Since
|f+ − g+| ≤ |f − g|, we have∣∣∣[uε(l0, t)− vε(l0, t)− d1]+ − [vε(l0, t)− uε(l0, t)− d2]
+
− [wε(l0, t)− zε(l0, t)− d1]+ + [zε(l0, t)− wε(l0, t)− d2]
+∣∣∣
≤ |uε(l0, t)− vε(l0, t)− wε(l0, t) + zε(l0, t)|+ |zε(l0, t)− wε(l0, t)− vε(l0, t) + uε(l0, t)|
≤ 2 [|uε(l0, t)|+ |vε(l0, t)|] . (4.24)
Then, applying the Young and Poincare inequalities and the Sobolev embedding theorem
(cf. (3.3)), (4.23) becomesd
dtEε(t) ≤ CEε(t). (4.25)
By the Gronwall lemma and recalling that Eε(0) = 0, we find that Eε(t) = 0 on (0, T ).
This implies that (uε, vε) = (wε, zε), and our conclusion follows. �
5. Proof of Theorem 2.2. In this section we prove existence of a weak solution to
problem (1.1)–(1.7) by showing that the solution to the penalized problem (4.2)–(4.7)
approaches a weak solution to (1.1)–(1.7) as ε → 0. For later convenience, let us introduce
the following functionals:
J ε(t) =1
2ε
{|[uε(l0, t)− vε(l0, t)− d1]
+|2 + |[vε(l0, t)− uε(l0, t)− d2]+|2
}, (5.1)
E(t, uε, vε) = E(t, uε, vε) + J ε(t). (5.2)
Let (u0, v0) ∈ K, (u1, v1) ∈ L2(0, l0) × L2(l0, l), (uε0, v
ε0), (uε
1, vε1) be sequences of
functions such that
(uε0, v
ε0) → (u0, v0) in H2(0, l0)×H2(l0, l),
(uε1, v
ε1) → (u1, v1) in L2(0, l0)× L2(l0, l).
(5.3)
We multiply equation (4.2)1 by uεt . An integration over (0, l0) and the boundary condi-
tions (4.3)–(4.6) lead to
1
2
d
dt
∫ l0
0
[|uε
t (x, t)|2 +G1(t)|uεxx(x, t)|2 + (g1�uε
xx)(x, t)]dx
+1
2
∫ l0
0
[(−g′1�uε
xx)(x, t) + g1(t)|uεxx(x, t)|2
]dx− σε(t)uε
t (l0, t) = 0.
Similarly, multiplying (4.2)2 by vεt and integrating over (l0, l), we have
1
2
d
dt
∫ l
l0
[|vεt (x, t)|2 +G2(t)|vεxx(x, t)|2 + (g2�vεxx)(x, t)
]dx
+1
2
∫ l
l0
[(−g′2�vεxx)(x, t) + g2(t)|vεxx(x, t)|2
]dx+ σε(t)vεt (l0, t) = 0.
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 491
Adding the resulting equations, on account of (4.5), (5.1) and (5.2), we obtain
d
dtE(t, uε, vε) +
1
2
∫ l0
0
[(−g′1�uε
xx)(x, t) + g1(t)|uεxx(x, t)|2
]dx
+1
2
∫ l
l0
[(−g′2�vεxx)(x, t) + g2(t)|vεxx(x, t)|2
]dx+ ε|uε
t (l0, t)− vεt (l0, t)|2 = 0. (5.4)
We integrate over (0, t). Thus, in view of (H.1),we deduce
E(t, uε, vε) + ε
∫ t
0
|uεt (l0, t)− vεt (l0, t)|2ds ≤ E(0, uε, vε) ≤ C.
The boundedness of E(t, uε, vε) implies that there exists a subsequence, still denoted by
(uε, vε), satisfying the following convergences:
uε ∗⇀ u in W 1,∞ (
0, T ;L2(0, l0))∩ L∞ (
0, T ;H2(0, l0)),
vε∗⇀ v in W 1,∞ (
0, T ;L2(l0, l))∩ L∞ (
0, T ;H2(l0, l)),
(5.5)
and
ε
∫ t
0
|uεt (l0, s)− vεt (l0, s)|2ds → 0.
A generalized version of Ascoli’s theorem (see, e.g., [43]) yields
uε → u in C0(0, T ;H2−s(0, l0)
), s > 0,
vε → v in C0(0, T ;H2−s(l0, l)
), s > 0,
from which we conclude that (u, v) ∈ W 1,∞ (0, T ;L2(0, l0)× L2(l0, l)
)∩ L∞ (0, T ;K).
Our goal now consists in showing that (u, v) is a weak solution to (1.1)–(1.7). Let
(w, z) ∈ W 1,∞ (0, T ;L2(0, l0)× L2(l0, l)
)∩ L∞ (0, T ;K) such that w(·, T ) = u(·, T ) and
z(·, T ) = v(·, T ). We multiply (4.2)1 by w − uε, (4.2)2 by z − vε and we sum up the
resulting equations. By taking (4.7)–(4.6) into account, we obtain∫ T
0
∫ l0
0
[−uεt (x, t)[wt(x, t)− uε
t (x, t)] dx dt
+
∫ T
0
∫ l0
0
[γ1uεxx(x, t)− (g1 ∗ uε
xx)(x, t)][wxx(x, t)− uεxx(x, t)] dx dt
+
∫ T
0
∫ l
l0
−vεt (x, t)[zt(x, t)− vεt (x, t)] dx dt
+
∫ T
0
∫ l
l0
[γ2vεxx(x, t)− (g2 ∗ vεxx)(x, t)][zxx(x, t)− vεxx(x, t)] dx dt
≥∫ l0
0
uε1(x)[w(x, 0)− uε
0(x)] dx+
∫ l
l0
vε1(x)[z(x, 0)− vε0(x)] dx.
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

492 A. BERTI AND M.G. NASO
We pass to lim supε→0
in the previous inequality. By proceeding as in [22, Lemma 4.3], we
can obtain
lim supε→0
∫ T
0
∫ l0
0
{|uε
t (x, t)|2 − [β1uεxx(x, t)− (g1 ∗ uε
xx)(x, t)]uεxx(x, t)
}dx dt
≤∫ T
0
∫ l0
0
{|ut(x, t)|2 − [β1uxx(x, t)− (g1 ∗ uxx)(x, t)]uxx(x, t)
}dx dt
and
lim supε→0
∫ T
0
∫ l
l0
{|vεt (x, t)|2 − [β2v
εxx(x, t)− (g2 ∗ vεxx)(x, t)]vεxx(x, t)
}dx dt
≤∫ T
0
∫ l
l0
{|vt(x, t)|2 − [β2vxx(x, t)− (g2 ∗ vxx)(x, t)]vxx(x, t)
}dx dt.
Accordingly, in view of convergences (5.3) and (5.5), we recover (2.3).
Remark 5.1. Concerning uniqueness, we point out that we are able to prove it only in
the case of the penalized problem (4.2)–(4.7) (see Proposition 4.3). In fact, our argument
for uniqueness relies on two crucial properties of the approximate problem: the presence
of viscosity terms−ε [uεt (l0, t)− vεt (l0, t)] in the approximate stress σε(t) and the Lipschitz
continuity (of constant 1/ε) of σε(t) (cf. (4.21)). In the original problem (limit problem
as ε → 0) these properties fall and our procedure does not apply. As mentioned in the
introduction, as far as we know, the uniqueness of the solution to the limit problem
remains an open issue.
6. Exponential decay. To prove that the energy related to system (1.1)–(1.7) decays
exponentially as t → ∞, we first show that the energy associated to the approximating
problem decays exponentially, and subsequently let ε → 0.
We suppose that the memory kernels gi, i = 1, 2, satisfy assumptions (H.1)–(H.3).
Here and in that follows, let (uε, vε) be the solution (as found in Proposition 4.3) to
problem (4.2)–(4.7), with initial data satisfying (4.7)–(4.1) and compatible with the
boundary conditions (4.3)–(4.6) for t = 0.
6.1. Useful lemmas. We now define the functionals
Iu1 (t) =
∫ l0
0
uε(x, t)uεt(x, t) dx, Iv1 (t) =
∫ l
l0
vε(x, t)vεt (x, t) dx,
Iu2 (t) =
∫ l0
0
ψ1(x)uεx(x, t)u
εt (x, t) dx, Iv2 (t) =
∫ l
l0
ψ2(x)vεx(x, t)v
εt (x, t) dx,
Iu3 (t) = −∫ l0
0
φ(x)uεt (x, t)(g1 ∗ uε)t(x, t) dx+
1
2
∫ l0
0
φ(x)|(g1 ∗ uεxx)(x, t)|2 dx,
Iv3 (t) =
∫ l
l0
φ(x)vεt (x, t)(g2 ∗ vε)t(x, t) dx− 1
2
∫ l
l0
φ(x)|(g2 ∗ vεxx)(x, t)|2 dx,
Iu4 (t) =
∫ l0
0
φ(x)uε(x, t)uεt(x, t) dx, Iv4 (t) = −
∫ l
l0
φ(x)vε(x, t)vεt (x, t) dx,
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 493
where ψ1 : [0, l0] → R, ψ2 : [l0, l] → R, φ : [0, l] → R such that
ψ1(x) = x2 − l0x, ψ2(x) = −x2 + (l0 + l)x− l0l, φ(x) = l0 − x. (6.1)
The choice of the functions ψ1, ψ2, φ has been performed in order to get rid of some
boundary terms as well as to obtain a control on the norm of the solution (cf. Lemmas
6.2–6.3).
Let δj , j = 1, 2, 3, be some suitable positive constants which will be specified in
Section 6.2.
Lemma 6.1. The following holds:
d
dt
[Iu1 (t) + Iv1 (t) +
ε
2|uε(l0, t)− vε(l0, t)|2
]≤ −
∫ l0
0
G1(t)|uεxx(x, t)|2 dx−
∫ l
l0
G2(t)|vεxx(x, t)|2 dx− 2J ε(t)
+
∫ l0
0
|uεt (x, t)|2 dx+ δ1
∫ l0
0
|uεxx(x, t)|2 dx+ C
∫ l0
0
(g1�uεxx)(x, t) dx
+
∫ l
l0
|vεt (x, t)|2 dx+ δ1
∫ l
l0
|vεxx(x, t)|2 dx+ C
∫ l
l0
(g2�vεxx)(x, t) dx. (6.2)
Proof. By means of equation (4.2)1, we obtain
d
dtIu1 (t) =
∫ l0
0
uε(x, t)uεtt(x, t) dx+
∫ l0
0
|uεt (x, t)|2 dx
=
∫ l0
0
uε(x, t)[−γ1uεxxxx(x, t) + (g1 ∗ uε
xxxx)(x, t)] dx+
∫ l0
0
|uεt (x, t)|2 dx.
We perform two integrations by parts by taking the boundary conditions (4.3), (4.4),
(4.6) into account. Assumption (H.1), identity (3.2) and Lemma 3.4 lead to
d
dtIu1 (t) =
∫ l0
0
uεxx(x, t)[−γ1u
εxx(x, t) + (g1 ∗ uε
xx)(x, t)] dx+
∫ l0
0
|uεt (x, t)|2 dx
+[−γ1uεxxx(l0, t) + (g1 ∗ uε
xxx)(l0, t)]uε(l0, t)
=
∫ l0
0
{−γ1|uε
xx(x, t)|2 +[∫ t
0
g1(τ ) dτ
]|uε
xx(x, t)|2 − [g1 uεxx(x, t)]u
εxx(x, t)
}dx
+
∫ l0
0
|uεt (x, t)|2 dx+ σε(t)uε(l0, t)
≤ −∫ l0
0
G1(t)|uεxx(x, t)|2 dx+ δ1
∫ l0
0
|uεxx(x, t)|2 dx+ C
∫ l0
0
(g1�uεxx)(x, t) dx
+
∫ l0
0
|uεt (x, t)|2 dx+ σε(t)uε(l0, t),
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

494 A. BERTI AND M.G. NASO
where δ1 > 0. Similarly, we have
d
dtIv1 (t) ≤ −
∫ l
l0
G2(t)|vεxx(x, t)|2 dx+ δ1
∫ l
l0
|vεxx(x, t)|2 dx+ C
∫ l
l0
(g2�vεxx)(x, t) dx
+
∫ l
l0
|vεt (x, t)|2 dx− σε(t)vε(l0, t).
Therefore,
d
dt
[Iu1 (t) + Iv1 (t) +
ε
2|uε(l0, t)− vε(l0, t)|2
]
≤ −∫ l0
0
G1(t)|uεxx(x, t)|2 dx+ δ1
∫ l0
0
|uεxx(x, t)|2 dx+ C
∫ l0
0
(g1�uεxx)(x, t) dx
+
∫ l0
0
|uεt (x, t)|2 dx−
∫ l
l0
G2(t)|vεxx(x, t)|2 dx+ δ′1
∫ l
l0
|vεxx(x, t)|2 dx
+ C
∫ l
l0
(g2�vεxx)(x, t) dx+
∫ l
l0
|vεt (x, t)|2 dx
+ {σε(t) + ε[uεt (l0, t)− vεt (l0, t)]}[uε(l0, t)− vε(l0, t)].
In order to reach the conclusion, we have to estimate the last term in the previous
inequality. By exploiting (4.5) and recalling the equality f+f = |f+|2, we obtain
{σε(t) + ε[uεt (l0, t)− vεt (l0, t)]} [uε(l0, t)− vε(l0, t)]
= −1
ε{[uε(l0, t)− vε(l0, t)− d1]
+ − [vε(l0, t)− uε(l0, t)− d2]+}[uε(l0, t)− vε(l0, t)]
≤ −2J ε(t),
where J ε(t) is given in (5.1). Accordingly, (6.2) holds. �
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 495
Lemma 6.2. The following inequalities hold:
d
dtIu2 (t) ≤ − l0
4
∫ l0
3/4l0
|uεt (x, t)|2 dx− 3l0
4γ1
∫ l0
3/4l0
|uεxx(x, t)|2 dx
+l02
∫ 3/4l0
0
|uεt (x, t)|2 dx+
3l02γ1
∫ 3/4l0
0
|uεxx(x, t)|2 dx+ δ2
∫ l0
0
|uεxx(x, t)|2 dx
+ C
∫ l0
0
[|(g1 ∗ uε
xx)(x, t)|2 + |(g1 ∗ uεxxx)(x, t)|2
]dx, (6.3)
d
dtIv2 (t) ≤ − l − l0
4
∫ (3l0+l)/4
l0
|vεt (x, t)|2 dx− 3(l − l0)
4γ2
∫ (3l0+l)/4
l0
|vεxx(x, t)|2 dx
+l − l02
∫ l0
(3l0+l)/4
|vεt (x, t)|2 dx+3(l − l0)
2γ2
∫ l
(3l0+l)/4
|vεxx(x, t)|2 dx
+ δ2
∫ l
l0
|vεxx(x, t)|2 dx+ C
∫ l
l0
[|(g2 ∗ vεxx)(x, t)|2 + |(g2 ∗ vεxxx)(x, t)|2
]dx.
(6.4)
Proof. We differentiate Iu2 with respect to t and we substitute (4.2)1. By integrating
by parts and taking (4.3)–(4.6), (6.1) into account, we obtain
d
dtIu2 (t) =
∫ l0
0
ψ1(x)uεxt(x, t)u
εt(x, t) dx
−∫ l0
0
ψ1(x)uεx(x, t)[γ1u
εxxxx(x, t)− (g1 ∗ uε
xxxx)(x, t)] dx
= −1
2
∫ l0
0
ψ′1(x)|uε
t (x, t)|2 dx
+
∫ l0
0
ψ1(x)uεxx(x, t)[γ1u
εxxx(x, t)− (g1 ∗ uε
xxx)(x, t)] dx
−∫ l0
0
[ψ′′1 (x)u
εx(x, t) + ψ′
1(x)uεxx(x, t)][γ1u
εxx(x, t)− (g1 ∗ uε
xx)(x, t)] dx
= −1
2
∫ l0
0
ψ′1(x)|uε
t (x, t)|2 dx− 3
2γ1
∫ l0
0
ψ′1(x)|uε
xx(x, t)|2 dx
−∫ l0
0
ψ1(x)uεxx(x, t)(g1 ∗ uε
xxx)(x, t) dx− γ1|ux(l0, t)|2
+
∫ l0
0
[2uεx(x, t) + ψ′
1(x)uεxx(x, t)](g1 ∗ uε
xx)(x, t) dx.
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

496 A. BERTI AND M.G. NASO
From (6.1) it follows that
ψ′1(x) ≥
⎧⎪⎪⎨⎪⎪⎩−l0 if x ∈
[0,
3
4l0
),
l02
if x ∈[3
4l0, l0
].
Accordingly, the Holder and Young inequalities lead to (6.3). Similarly, by differentiating
Iv2 we obtain
d
dtIv2 (t) = −1
2
∫ l
l0
ψ′2(x)|uε
t (x, t)|2 dx− 3
2γ2
∫ l
l0
ψ′2(x)|vεxx(x, t)|2 dx− γ2|vx(l0, t)|2
−∫ l
l0
ψ2(x)vεxx(x, t)(g2 ∗ vεxxx)(x, t) dx
+
∫ l
l0
[2vεx(x, t) + ψ′2(x)v
εxx(x, t)](g2 ∗ vεxx)(x, t) dx.
Furthermore, in view of (6.1), we have
ψ′2(x) ≥
⎧⎪⎪⎨⎪⎪⎩l − l02
if x ∈[l0,
3l0 + l
4
),
−(l − l0) if x ∈[3l0 + l
4, l
],
and (6.4) is proved. �
Lemma 6.3. The following inequalities hold:
d
dt[4Iu3 (t) + g1(0)I
u4 (t)] ≤ −g1(0)
l04
∫ 3/4l0
0
|uεt (x, t)|2 dx
− l08γ1g1(0)
∫ 3/4l0
0
|uεxx(x, t)|2 dx
+ δ3
∫ l0
0
|uεxx(x, t)|2 dx+ Cg1(t)
∫ l0
0
|uεxx(x, t)|2 dx
+ C
∫ l0
0
[|uε
x(x, t)|2 + |(g1 ∗ uεxx)(x, t)|2 dx+ (g1�uε
xx)(x, t)]dx, (6.5)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 497
d
dt[4Iv3 (t) + g2(0)I
v4 (t)] ≤ −g2(0)
l − l04
∫ l
(3l0+l)/4
|vεt (x, t)|2 dx
− l − l08
γ2g2(0)
∫ l
(3l0+l)/4
|vεxx(x, t)|2 dx
+ δ3
∫ l
l0
|vεxx(x, t)|2 dx+ Cg2(t)
∫ l
l0
|vεxx(x, t)|2 dx
+ C
∫ l
l0
[|vεx(x, t)|2 + |(g2 ∗ vεxx)(x, t)|2 dx+ (g1�vεxx)(x, t)
]dx. (6.6)
Proof. By multiplying (4.2)1 by φ(g1 ∗ uε)t and integrating over (0, l0), we obtain
∫ l0
0
d
dt[φ(x)uε
t (x, t)(g1 ∗ uε)t(x, t)] dx−∫ l0
0
φ(x)uεt (x, t)(g1 ∗ uε)tt(x, t) dx
+
∫ l0
0
[γ1uεxxxx(x, t)− (g1 ∗ uε
xxxx)(x, t)]φ(x)(g1 ∗ uε)t(x, t) dx = 0.
We perform two integrations by parts. Recalling function φ as introduced in (6.1),
boundary conditions (4.4)–(4.6) yield
∫ l0
0
d
dt[φ(x)uε
t (x, t)(g1 ∗ uε)t(x, t)]−∫ l0
0
φ(x)uεt (x, t)(g1 ∗ uε)tt(x, t) dx
+
∫ l0
0
[γ1uεxx(x, t)− (g1 ∗ uε
xx)(x, t)][−2(g1 ∗ uεx)t(x, t) + φ(x)(g1 ∗ uε
xx)t(x, t)] dx = 0.
Therefore, in view of (3.2)2, we deduce
d
dtIu3 (t) =−
∫ l0
0
φ(x)g1(0)|uεt (x, t)|2 dx−
∫ l0
0
φ(x)g′1(t)uε(x, t)uε
t (x, t) dx
+
∫ l0
0
φ(x)uεt (x, t)(g
′′1 uε)(x, t) dx+
∫ l0
0
γ1g1(t)φ(x)|uεxx(x, t)|2 dx
−∫ l0
0
γ1φ(x)uεxx(x, t)(g
′1 uε
xx)(x, t) dx− γ1g1(t)|uεx(l0)|2
+ 2γ1
∫ l0
0
uεxx(x, t)(g
′1 uε
x)(x, t) dx+ 2g1(t)
∫ l0
0
uεx(x, t)(g1 ∗ uε
xx)(x, t) dx
− 2
∫ l0
0
(g′1 uεx)(x, t)(g1 ∗ uε
xx)(x, t) dx. (6.7)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

498 A. BERTI AND M.G. NASO
Owing to the Holder, Young, and Poincare inequalities, Lemma 3.4, and assumption
(H.3) we have
d
dtIu3 (t) ≤ −
∫ l0
0
g1(0)
2φ(x)|uε
t (x, t)|2 dx+ λ1
∫ l0
0
|uεxx(x, t)|2 dx
+C
∫ l0
0
[g1(t)|uε
xx(x, t)|2 + (g1�uεxx)(x, t) + |(g1 ∗ uε
xx)(x, t)|2]dx,
where λ1 is a small enough positive constant.
We now differentiate Iu4 . On account of (4.2)1, (4.3)1, (4.6)1 and (6.1), we obtain
d
dtIu4 (t) =
∫ l0
0
φ(x)|uεt (x, t)|2 dx
+
∫ l0
0
φ(x)uε(x, t)[−γ1uεxxxx(x, t) + (g1 ∗ uε
xxxx)(x, t)] dx
=
∫ l0
0
φ(x)|uεt (x, t)|2 dx
+
∫ l0
0
[2uεx(x, t)− φ(x)uε
xx(x, t)][γ1uεxx(x, t)− (g1 ∗ uε
xx)(x, t)] dx.
Therefore,
d
dtIu4 (t) ≤
∫ l0
0
φ(x)|uεt (x, t)|2 dx− γ1
2
∫ l0
0
φ(x)|uεxx(x, t)|2 dx+ λ2
∫ l0
0
|uεxx(x, t)|2 dx
+C
∫ l0
0
[|uεx(x, t)|2 + |(g1 ∗ uε
xx)(x, t)|2] dx,
where λ2 is a small enough positive constant. Accordingly,
d
dt[4Iu3 (t) + g1(0)I
u4 (t)]
≤ −g1(0)
∫ l0
0
φ(x)|uεt (x, t)|2 dx− γ1
2g1(0)
∫ l0
0
φ(x)|uεxx(x, t)|2 dx+ δ3
∫ l0
0
|uεxx(x, t)|2 dx
+ C
∫ l0
0
[|uε
x(x, t)|2 + |(g1 ∗ uεxx)(x, t)|2 dx+ g1(t)|uε
xx(x, t)|2 + (g1�uεxx)(x, t)
]dx,
where δ3 = 4λ1 + g1(0)λ2. Finally, by means of (6.1), we obtain (6.5). By repeating the
same arguments, we deduce (6.6) and we reach the conclusion. �In order to establish the exponential decay of the approximating problem, we have to
estimate the norms of the terms g1 ∗ uεxx, g1 ∗ uε
xxx, g2 ∗ vεxx, g2 ∗ vεxxx which appear in
Lemmas 6.2–6.3. Let us define
S(t, uε, vε) =
∫ l0
0
[|uε
x(x, t)|2 + |(g1 ∗ uεxx)(x, t)|2 + |(g1 ∗ uε
xxx)(x, t)|2]dx
+
∫ l
l0
[|vεx(x, t)|2 + |(g2 ∗ vεxx)(x, t)|2 + |(g2 ∗ vεxxx)(x, t)|2
]dx,
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 499
where (uε, vε) is a weak solution to problem (4.2)–(4.7). Proposition 4.2 guarantees that
S is well defined.
Lemma 6.4. For any η > 0 there exists a suitable constant Cη such that∫ T
0
S(t, uε, vε) dt ≤ η
{∫ T
0
E(t, uε, vε) dt+ ε
∫ T
0
[uεt (l0, t)− vεt (l0, t)]
2 dt
}
+ Cη
{∫ T
0
∫ l0
0
[(g1�uε
xx)(x, t) + g1(t)|uεxx(x, t)|2
]dx dt
+
∫ T
0
∫ l
l0
[(g2�vεxx)(x, t) + g2(t)|vεxx(x, t)|2
]dx dt
}. (6.8)
Proof. We suppose by contradiction that inequality (6.8) is not satisfied. Then, there
exist a positive constant η0 and a sequence of initial data (un0 , v
n0 ) ∈ K, (un
1 , vn1 ) ∈
L2(0, l0)×L2(l0, l), such that the corresponding solutions {(un, vn)}n∈N to the equations
untt(x, t) + γ1u
nxxxx(x, t)− (g1 ∗ un
xxxx)(x, t) = 0, (6.9)
vntt(x, t) + γ2vnxxxx(x, t)− (g2 ∗ vnxxxx)(x, t) = 0, (6.10)
with the boundary conditions
un(0, t) = 0, unx(0, t) = 0,
vn(l, t) = 0, vnx (l, t) = 0,
−γ1 unxx(l0, t) + (g1 ∗ un
xx)(l0, t) = 0,
−γ2 vnxx(l0, t) + (g2 ∗ vnxx)(l0, t) = 0,
σn1 (l0, t) = σn
2 (l0, t) = σn(t),
(6.11)
where
σn1 (l0, t) = −γ1 uxxx(l0, t) + (g1 ∗ uxxx)(l0, t),
σn2 (l0, t) = −γ2 vxxx(l0, t) + (g2 ∗ vxxx)(l0, t),
σn(t) = −1
ε{[un(l0, t)− vn(l0, t)− d1]
+ − [vn(l0, t)− un(l0, t)− d2]+}
−ε[unt (l0, t)− vnt (l0, t)],
and the initial conditions
un(x, 0) = un0 (x), un
t (x, 0) = un1 (x),
vn(x, 0) = vn0 (x), vnt (x, 0) = vn1 (x)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

500 A. BERTI AND M.G. NASO
satisfy the inequality
∫ T
0
S(t, un, vn) dt > η0
{∫ T
0
E(t, un, vn) dt+ ε
∫ T
0
[unt (l0, t)− vnt (l0, t)]
2 dt
}
+n
{∫ T
0
∫ l0
0
[(g1�un
xx)(x, t) + g1(t)|unxx(x, t)|2
]dx dt
+
∫ T
0
∫ l
l0
[(g2�vnxx)(x, t) + g2(t)|vnxx(x, t)|2
]dx dt
}
for every n ∈ N. We now suppose that
∫ T
0
S(t, un, vn) dt = 1.
Accordingly, we have
η0
{∫ T
0
E(t, un, vn) dt+ ε
∫ T
0
[unt (l0, s)− vnt (l0, s)]
2ds
}
+n
{∫ T
0
∫ l0
0
[(g1�un
xx)(x, t) + g1(t)|unxx(x, t)|2
]dx dt
+
∫ T
0
∫ l
l0
[(g2�vnxx)(x, t) + g2(t)|vnxx(x, t)|2
]dx dt
}< 1. (6.12)
We multiply (6.9) by unt , (6.10) by vnt and we add the resulting equations. By the same
procedure used to obtain (5.4), we find
d
dtE(t, un, vn) + ε[un
t (l0, t)− vnt (l0, t)]2 =
1
2
∫ l0
0
[(g′1�un
xx)(x, t)− g1(t)|unxx(x, t)|2
]dx
+1
2
∫ l
l0
[(g′2�vnxx)(x, t)− g2(t)|vnxx(x, t)|2
]dx;
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 501
namely, E is nonincreasing. An integration from 0 to T and assumption (H.2) lead to
E(0, un, vn) = E(T, un, vn) + ε
∫ T
0
[unt (l0, t)− vnt (l0, t)]
2 dt
−1
2
∫ T
0
∫ l0
0
[(g′1�un
xx)(x, t)− g1(t)|unxx(x, t)|2
]dx dt
−1
2
∫ T
0
∫ l
l0
[(g′2�vnxx)(x, t)− g2(t)|vnxx(x, t)|2
]dx dt
≤ 1
T
∫ T
0
E(t, un, vn) dt+ ε
∫ T
0
[unt (l0, t)− vnt (l0, t)]
2 dt
+1
2
∫ T
0
∫ l0
0
[α1(g1�un
xx)(x, t) + g1(t)|unxx(x, t)|2
]dx dt
+1
2
∫ T
0
∫ l
l0
[α2(g2�vnxx)(x, t) + g2(t)|vnxx(x, t)|2
]dx dt.
Condition (6.12) ensures that E(0, un, vn) is bounded. Accordingly, there exist a subse-
quence of (un0 , v
n0 ) and (un
1 , vn1 ), denoted by the same symbols, such that
(un0 , v
n0 )⇀(uε
0, vε0) in H2(0, l0)×H2(l0, l),
(un1 , v
n1 )⇀(uε
1, vε1) in L2(0, l0)× L2(l0, l).
Since E is nonincreasing, E(t, un, vn) is bounded too. Thus, we can extract subsequences
still denoted by (un, vn), (unt , v
nt ) such that
(un, vn)∗⇀ (uε, vε) in L∞ (
0, T ;H2(0, l0)×H2(l0, l)),
(unt , v
nt )
∗⇀ (uε
t , vεt ) in L∞ (
0, T ;L2(0, l0)× L2(l0, l)).
By [43, Corollary 8.4], we deduce that∫ T
0
∫ l0
0
|unx(x, t)| dx dt →
∫ T
0
∫ l0
0
|uεx(x, t)| dx dt,
∫ T
0
∫ l
l0
|vnx (x, t)| dx dt →∫ T
0
∫ l
l0
|vεx(x, t)| dx dt.
Moreover, inequality
‖(g1 ∗ uεxx)t‖L2(0,l0) ≤ g1(0)‖uε
xx‖L2(0,l0) + α1
∫ t
0
g1(t− s)‖uεxx‖L2(0,l0) ds
and Proposition 4.2 assure that g1 ∗ uε and (g1 ∗ uε)t are bounded respectively in
L∞ (0, T ;H4(0, l0)
)and L∞ (
0, T ;H2(0, l0)). A further application of [43, Corollary 8.4]
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

502 A. BERTI AND M.G. NASO
yields ∫ T
0
∫ l0
0
|(g1 ∗ unxx)(x, t)| dx dt →
∫ T
0
∫ l0
0
|(g1 ∗ uεxx)(x, t)| dx dt,∫ T
0
∫ l0
0
|(g1 ∗ unxxx)(x, t)| dx dt →
∫ T
0
∫ l0
0
|(g1 ∗ uεxxx)(x, t)| dx dt.
Similarly, we have∫ T
0
∫ l
l0
|(g2 ∗ vnxx)(x, t)| dx dt →∫ T
0
∫ l
l0
|(g2 ∗ vεxx)(x, t)| dx dt,
∫ T
0
∫ l
l0
|(g2 ∗ vnxxx)(x, t)| dx dt →∫ T
0
∫ l
l0
|(g2 ∗ vεxxx)(x, t)| dx dt.
The previous convergences and condition (6.13) lead to∫ T
0
S(t, uε, vε) dt = 1. (6.13)
In view of (6.12) we deduce∫ T
0
∫ l0
0
g1(t)|unxx(x, t)|2 dx dt → 0,
∫ T
0
∫ l
l0
g2(t)|vnxx(x, t)|2 dx dt → 0;
that is, uεxx = 0 a.e. in (0, l0)× (0, T ) and vεxx = 0 a.e. in (l0, l)× (0, T ). The boundary
conditions uε(0, t) = uεx(0, t) = vε(0, t) = vεx(0, t) = 0 imply
uε ≡ 0, a.e. in (0, l0)× (0, T ),
vε ≡ 0, a.e. in (l0, l)× (0, T ),
in contradiction with (6.13). �6.2. Proof of Theorem 2.3. Now, we are able to show that the energy associated to
system (1.1)–(1.7) decays exponentially to zero as t → ∞.
First, we show that the energy associated to the penalized problem (4.2)–(4.7) decays
exponentially as t → ∞. Let a, b > 0. In view of Lemmas 6.2–6.3, we obtain the following
estimates:
d
dt{Iu2 (t) + a [4Iu3 (t) + g1(0)I
u4 (t)]}
≤[l02− g1(0)
l04a
] ∫ 3/4l0
0
|uεt (x, t)|2 dx− l0
4
∫ l0
3/4l0
|uεt (x, t)|2 dx
+
(3l02γ1 −
l08γ1g1(0)a+ δ2 + aδ3
)∫ 3/4l0
0
|uεxx(x, t)|2 dx
+
(−3l0
4γ1 + δ2 + aδ3
)∫ l0
3/4l0
|uεxx(x, t)|2 dx+ C
∫ l0
0
g1(t)|uεxx(x, t)|2 dx
+ C
∫ l0
0
[|uε
x(x, t)|2 + |(g1 ∗ uεxx)(x, t)|2 dx+ (g1�uε
xx)(x, t) + |(g1 ∗ uεxxx)(x, t)|2
]dx
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 503
and
d
dt{Iv2 (t) + b [4Iv3 (t) + g1(0)I
v4 (t)]}
≤ − l − l04
∫ (3l0+l)/4
l0
|vεt (x, t)|2 dx+
[l − l02
− g2(0)bl − l04
] ∫ l0
(3l0+l)/4
|vεt (x, t)|2 dx
+
[−3(l − l0)
4γ2 + δ2 + bδ3
] ∫ (3l0+l)/4
l0
|vεxx(x, t)|2 dx
+
[3(l − l0)
2γ2 −
l − l048
γ2g2(0)b+ δ2 + bδ3
] ∫ l
(3l0+l)/4
|vεxx(x, t)|2 dx
+ C
∫ l
l0
g2(t)|vεxx(x, t)|2 dx
+ C
∫ l
l0
[|vεx(x, t)|2 + |(g2 ∗ vεxx)(x, t)|2 dx+ (g2�vεxx)(x, t) + |(g2 ∗ vεxxx)(x, t)|2
]dx.
Accordingly, by choosing δ2, δ3 small enough and a, b large enough, we have
d
dt{Iu2 (t) + Iv2 (t) + a [4Iu3 (t) + g1(0)I
u4 (t)] + b [4Iv3 (t) + g1(0)I
v4 (t)]}
≤ −δ
∫ l0
0
|uεt (x, t)|2 dx− δ
∫ l
l0
|vεt (x, t)|2 dx− δ
∫ l0
0
|uεxx(x, t)|2 dx
− δ
∫ l
l0
|vεxx(x, t)|2 dx+ C
[∫ l0
0
g1(t)|uεxx(x, t)|2 dx+
∫ l
l0
g2(t)|vεxx(x, t)|2 dx]
+ C
∫ l0
0
[|uε
x(x, t)|2 + |(g1 ∗ uεxx)(x, t)|2 dx+ (g1�uε
xx)(x, t) + |(g1 ∗ uεxxx)(x, t)|2
]dx
+ C
∫ l
l0
[|vεx(x, t)|2 + |(g2 ∗ vεxx)(x, t)|2 dx+ (g2�vεxx)(x, t) + |(g2 ∗ vεxxx)(x, t)|2
]dx,
where δ is a suitable positive constant.
As shown in the proof of Proposition 4.3, we can find an analogous equation to (5.4),
and then from (H.2) the following inequality holds:
d
dtE(t, uε, vε) ≤ −1
2
∫ l0
0
[α1(g1�uε
xx)(x, t) + g1(t)|uεxx(x, t)|2
]dx
− 1
2
∫ l
l0
[α2(g2�vεxx)(x, t) + g2(t)|vεxx(x, t)|2
]dx− ε|uε
t (l0, t)− vεt (l0, t)|2.
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

504 A. BERTI AND M.G. NASO
We choose δ1 = 1 in Lemma 6.1 and we let
F(t) =δ
2
[Iu1 (t) + Iv1 (t) +
ε
2|uε(l0, t)− vε(l0, t)|2
],
G(t) = Iu2 (t) + Iv2 (t) + a [4Iu3 (t) + g1(0)Iu4 (t)] + b [4Iv3 (t) + g1(0)I
v4 (t)] ,
L(t) = F(t) + G(t) +NE(t),
where N , a and b are positive constants that we will choose later. We begin by noting
that, by means of the Poincare inequality, we obtain
ε|uε(l0, t)− vε(l0, t)|2 ≤ 2
[∫ l0
0
|uεxx(x, t)|2 dx+
∫ l0
0
|vεxx(x, t)|2 dx]≤ CE(t, uε, vε).
Similarly, one can easily check that ifN is large enough, there exist two positive constants,
K1,K2, independent of ε and t such that
K1E(t, uε, vε) ≤ L(t) ≤ K2E(t, uε, vε). (6.14)
Furthermore, by means of Lemma 6.1 we have
d
dtL(t) + N
2ε|uε
t (l0, t)− vεt (l0, t)|2 ≤ −δ
2
[∫ l0
0
|uεt (x, t)|2 dx+
∫ l
l0
|vεt (x, t)|2 dx]
− δ
2
[∫ l0
0
|uεxx(x, t)|2 dx+
∫ l
l0
|vεxx(x, t)|2 dx]
− δ
2
∫ l0
0
G1(t)|uεxx(x, t)|2 dx− δ
2
∫ l
l0
G2(t)|vεxx(x, t)|2 dx− δJ ε(t)
− (αN − C)
[∫ l0
0
g1(t)|uεxx(x, t)|2 dx+
∫ l
l0
g2(t)|vεxx(x, t)|2 dx]
− (αN − C)
[∫ l0
0
(g1�uεxx)(x, t) dx+
∫ l
l0
(g2�vεxx)(x, t) dx
]
+ C
∫ l0
0
[|uε
x(x, t)|2 + |(g1 ∗ uεxx)(x, t)|2 dx+ |(g1 ∗ uε
xxx)(x, t)|2]dx
+ C
∫ l
l0
[|vεx(x, t)|2 + |(g2 ∗ vεxx)(x, t)|2 dx+ |(g2 ∗ vεxxx)(x, t)|2
]dx,
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 505
where α =1
2min{1, α1, α2}. We now fix T > 0 and integrate over [r, T + r], with r ≥ 0.
By applying Lemma 6.4 over [r, T + r], we have
L(T+r) ≤ L(r)−(N
2− ηC
)ε
∫ T+r
r
|uεt (l0, τ )−vεt (l0, τ )|2 dτ+ηC
∫ T+r
r
E(t, uε, vε) dt
− δ
2
∫ T+r
r
∫ l0
0
[|uε
t (x, t)|2 + |uεxx(x, t)|2 +G1(t)|uε
xx(x, t)|2]dx dt
− δ
2
∫ T+r
r
∫ l
l0
[|vεt (x, t)|2 + |vεxx(x, t)|2 +G2(t)|vεxx(x, t)|2
]dx dt
− δ
∫ T+r
r
J ε(t) dt− (αN − C)
∫ T+r
r
∫ l0
0
[g1(t)|uε
xx(x, t)|2 + (g1�uεxx)(x, t)
]dx dt
− (αN − C)
∫ T+r
r
∫ l
l0
[g2(t)|vεxx(x, t)|2 + (g2�vεxx)(x, t)
]dx dt.
We choose η small enough and N large enough such that
c2 := min{δ, αN − C} − ηC > 0 andN
2− ηC > 0.
Accordingly, the estimate
L(T + r) ≤ L(r)− c2
∫ T+r
r
E(τ, uε, vε) dτ (6.15)
holds. From (6.14), (6.15) and the nonincreasing character of E , it follows that
L(T + r) ≤ L(r)− c2TE(T + r, uε, vε) ≤ L(r)− c2T
K2L(T + r),
which implies
L(T + r) ≤ νL(r), with ν =
(1 +
c2T
K2
)−1
. (6.16)
Let t > 0. Thus, there exist n ∈ N, r ∈ (0, T ) such that
t = nT + r. (6.17)
By applying inequality (6.16) n times and recalling (6.14), we have
E(t) ≤ K2L(nT + r) ≤ K2νnL(r) ≤ K2
K1νnE(r). (6.18)
Since the energy E(t) is decreasing and letting μ = − 1
Tln ν, M =
K2
K1ν−r/T , we obtain
E(t) ≤ ME(0)e−μt.
Conditions (4.1) and (4.7) assure that J ε(0) = 0. Hence, the inequality
E(t, uε, vε) ≤ E(t) ≤ ME(0, uε, vε)e−μt
holds. We reach the conclusion by means of lower weak semicontinuity arguments.
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

506 A. BERTI AND M.G. NASO
References
[1] K.T. Andrews, M. Shillor, and S. Wright, On the dynamic vibrations of an elastic beam in frictionalcontact with a rigid obstacle, J. Elasticity 42 (1996), no. 1, 1–30. MR1390198 (97h:73073)
[2] H. Antes and P. D. Panagiotopoulos, The boundary integral approach to static and dynamic contactproblems, International Series of Numerical Mathematics, vol. 108, Birkhauser Verlag, Basel, 1992,Equality and inequality methods. MR1180519 (94b:73048)
[3] G. Bonfanti, M. Fabrizio, J.E. Munoz Rivera, and M.G. Naso, On the energy decay for a thermoe-lastic contact problem involving heat transfer, J. Thermal Stresses, in press.
[4] G. Bonfanti, J.E. Munoz Rivera, and M.G. Naso, Global existence and exponential stability for acontact problem between two thermoelastic beams, J. Math. Anal. Appl. 345 (2008), no. 1, 186–202.MR2422644 (2009g:74107)
[5] G. Bonfanti and M.G. Naso, A dynamic contact problem between two thermoelastic beams, Appliedand Industrial Mathematics in Italy III, Ser. Adv. Math. Appl. Sci., vol. 82, World Sci. Publ.,Hackensack, NJ, 2009, pp. 123–132.
[6] M. I. M. Copetti and D. A. French, Numerical approximation and error control for a thermoelasticcontact problem, Appl. Numer. Math. 55 (2005), no. 4, 439–457. MR2176623 (2006e:74034)
[7] M.I.M. Copetti, Finite element approximation to a quasi-static thermoelastic problem to the contact
of two rods, Appl. Numer. Math. 44 (2003), no. 1-2, 31–47. MR1951286 (2004b:65146)[8] , Numerical approximation of dynamic deformations of a thermoviscoelastic rod against
an elastic obstacle, M2AN Math. Model. Numer. Anal. 38 (2004), no. 4, 691–706. MR2087730(2005e:74030)
[9] C.M. Dafermos, Asymptotic stability in viscoelasticity, Arch. Rational Mech. Anal. 37 (1970), 297–308. MR0281400 (43:7117)
[10] G. Duvaut and J.-L. Lions, Inequalities in mechanics and physics, Springer-Verlag, Berlin, 1976.MR0521262 (58:25191)
[11] C. Eck, J. Jarusek, and M. Krbec, Unilateral contact problems, Variational methods and existencetheorems. Pure and Applied Mathematics (Boca Raton), vol. 270, Chapman & Hall/CRC, BocaRaton, FL, 2005. MR2128865 (2006f:74049)
[12] C. M. Elliott and Q. Tang, A dynamic contact problem in thermoelasticity, Nonlinear Anal. 23(1994), no. 7, 883–898. MR1302150 (95i:73013)
[13] M. Fabrizio and B. Lazzari, On the existence and the asymptotic stability of solutions for linearlyviscoelastic solids, Arch. Rational Mech. Anal. 116 (1991), no. 2, 139–152. MR1143437 (92k:73040)
[14] M. Fabrizio and A. Morro, Mathematical problems in linear viscoelasticity, SIAM Studies in AppliedMathematics, vol. 12, Society for Industrial and Applied Mathematics (SIAM), Philadelphia, PA,1992. MR1153021 (93a:73034)
[15] M. Fremond, Non-smooth thermomechanics, Springer-Verlag, Berlin, 2002. MR1885252(2003g:74004)
[16] H. Gao and J.E. Munoz Rivera, Global existence and decay for the semilinear thermoelastic contactproblem, J. Differential Equations 186 (2002), no. 1, 52–68. MR1941092 (2004a:74010)
[17] C. Giorgi and B. Lazzari, On the stability for linear viscoelastic solids, Quart. Appl. Math. 55
(1997), no. 4, 659–675. MR1486541 (98h:73050)[18] W. Han and M. Sofonea, Quasistatic contact problems in viscoelasticity and viscoplasticity, AMS/IP
Studies in Advanced Mathematics, vol. 30, American Mathematical Society, Providence, RI, 2002.MR1935666 (2003m:74086)
[19] N. Kikuchi and J. T. Oden, Contact problems in elasticity: A study of variational inequalities andfinite element methods, SIAM Studies in Applied Mathematics, vol. 8, Society for Industrial andApplied Mathematics (SIAM), Philadelphia, PA, 1988. MR961258 (89j:73097)
[20] J.U. Kim, A one-dimensional dynamic contact problem in linear viscoelasticity, Math. MethodsAppl. Sci. 13 (1990), no. 1, 55–79. MR1060224 (91f:35182)
[21] K. L. Kuttler, A. Park, M. Shillor, and W. Zhang, Unilateral dynamic contact of two beams, Math.Comput. Modelling 34 (2001), no. 3-4, 365–384. MR1835833 (2002d:74056)
[22] K.L. Kuttler and M. Shillor, Vibrations of a beam between two stops, Dyn. Contin. Discrete Impuls.Syst. Ser. B Appl. Algorithms 8 (2001), no. 1, 93–110. MR1824287 (2003a:74023)
[23] J. Lagnese and J.-L. Lions, Modelling analysis and control of thin plates, Recherches enMathematiques Appliquees, vol. 6, Masson, Paris, 1988. MR953313 (89k:73001)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf

VISCOELASTIC CONTACT PROBLEM 507
[24] Z. Liu and S. Zheng, On the exponential stability of linear viscoelasticity and thermoviscoelasticity,Quart. Appl. Math. 54 (1996), no. 1, 21–31. MR1373836 (97f:73019)
[25] J.E. Munoz Rivera, Asymptotic behaviour in linear viscoelasticity, Quart. Appl. Math. 52 (1994),no. 4, 628–648. MR1306041 (95j:73052)
[26] J.E. Munoz Rivera and D. Andrade, Existence and exponential decay for contact problems in ther-moelasticity, Appl. Anal. 72 (1999), no. 3-4, 253–273. MR1709063 (2000d:74027)
[27] J.E. Munoz Rivera and M. de Lacerda Oliveira, Exponential stability for a contact problem inthermoelasticity, IMA J. Appl. Math. 58 (1997), no. 1, 71–82. MR1446623 (98i:73052)
[28] J.E. Munoz Rivera and S. Jiang, The thermoelastic and viscoelastic contact of two rods, J. Math.Anal. Appl. 217 (1998), no. 2, 423–458. MR1492098 (98m:73076)
[29] J.E. Munoz Rivera, M.G. Naso, and F.M. Vegni, Asymptotic behavior of the energy for a classof weakly dissipative second-order systems with memory, J. Math. Anal. Appl. 286 (2003), no. 2,692–704. MR2008858 (2004j:35205)
[30] J.E. Munoz Rivera and H. Portillo Oquendo, Existence and decay to contact problems for thermo-viscoelastic plates, J. Math. Anal. Appl. 233 (1999), no. 1, 56–76. MR1684372 (2000b:74059)
[31] , Exponential decay for a contact problem with local damping, Funkcial. Ekvac. 42 (1999),
no. 3, 371–387. MR1745310 (2001h:35113)[32] J.E. Munoz Rivera and H. Portillo Oquendo, Exponential stability to a contact problem of partially
viscoelastic materials, J. Elasticity 63 (2001), no. 2, 87–111. MR1886854 (2002m:35014)[33] J.E. Munoz Rivera and J.B. Sobrinho, Existence and uniform rates of decay for contact problems
in viscoelasticity, Appl. Anal. 67 (1997), no. 3-4, 175–199. MR1614041 (98m:73050)[34] M. Nakao and J.E. Munoz Rivera, The contact problem in thermoviscoelastic materials, J. Math.
Anal. Appl. 264 (2001), no. 2, 522–545. MR1876748 (2002j:74060)[35] V. Pata, Exponential stability in linear viscoelasticity, Quart. Appl. Math. 64 (2006), no. 3, 499–513.
MR2259051 (2007h:35211)[36] F.G. Pfeiffer, Applications of unilateral multibody dynamics, Phil. Trans. R. Soc. Lond. A 359
(2001), no. 1789, 2609–2628. MR1884318 (2002m:70016)[37] M. Renardy, W.J. Hrusa, and J.A. Nohel, Mathematical problems in viscoelasticity, Pitman Mono-
graphs and Surveys in Pure and Applied Mathematics, vol. 35, Longman Scientific & Technical,Harlow, 1987. MR919738 (89b:35134)
[38] M. Rochdi and M. Shillor, Existence and uniqueness for a quasistatic frictional bilateral con-tact problem in thermoviscoelasticity, Quart. Appl. Math. 58 (2000), no. 3, 543–560. MR1770654(2001b:74040)
[39] A. Rodrıguez-Aros, J.M. Viano, and M. Sofonea, Numerical analysis of a frictional contact prob-lem for viscoelastic materials with long-term memory, Numer. Math. 108 (2007), no. 2, 327–358.MR2358007 (2008m:74114)
[40] P. Shi and M. Shillor, Uniqueness and stability of the solution to a thermoelastic contact problem,European J. Appl. Math. 1 (1990), no. 4, 371–387. MR1117357 (92f:73010)
[41] M. Shillor, M. Sofonea, and J. J. Telega, Quasistatic viscoelastic contact with friction and weardiffusion, Quart. Appl. Math. 62 (2004), no. 2, 379–399. MR2054605 (2005b:74093)
[42] M. Shillor, M. Sofonea, and J.J. Telega, Models and analysis of quasistatic contact, Lect. NotesPhys., vol. 655, Springer, 2004.
[43] J. Simon, Compact sets in the space Lp(0, T ;B), Ann. Mat. Pura Appl. (4) 146 (1987), no. 1,65–96. MR916688 (89c:46055)
[44] M. Sofonea, W. Han, and M. Shillor, Analysis and approximation of contact problems with adhesionor damage, Pure and Applied Mathematics (Boca Raton), vol. 276, Chapman & Hall/CRC, BocaRaton, FL, 2006. MR2183435 (2007f:74077)
[45] M.E. Stavroulaki and G.E. Stavroulakis, Unilateral contact applications using FEM software, Int.
J. Appl. Math. Comput. Sci. 12 (2002), no. 1, 115–125. MR1905999 (2003c:74066)
License or copyright restrictions may apply to redistribution; see https://www.ams.org/license/jour-dist-license.pdf


![Pensacola Journal. (Pensacola, Florida) 1908-11-11 [p ].ufdcimages.uflib.ufl.edu/UF/00/07/59/11/01237/00330.pdf · 2009-05-12 · Phil-ip began benefit annual the Boston armory being](https://img.pdfslide.us/doc/110x75/5e3d1f2bc41903225c42f2f5/pensacola-journal-pensacola-florida-1908-11-11-p-2009-05-12-phil-ip-began.jpg)
















![CONDUCTION OF HEAT IN COMPOSITE SLABS* › journals › qam › 1950-08-02 › S0033-569X...1950] CONDUCTION OF HEAT IN COMPOSITE SLABS 189 perature at a surface, etc. In all these](https://img.pdfslide.us/doc/110x75/5f1c9a47ac3ea434b66e71d4/conduction-of-heat-in-composite-slabs-a-journals-a-qam-a-1950-08-02-a-s0033-569x.jpg)





![Pensacola Journal. (Pensacola, Florida) 1908-11-11 [p 7].ufdcimages.uflib.ufl.edu/UF/00/07/59/11/01237/00336.pdfQuina days good Lamar Benton meets states Gibson 13W 232239 Argo cambia](https://img.pdfslide.us/doc/110x75/60879f1f82bd501e1d64c86e/pensacola-journal-pensacola-florida-1908-11-11-p-7-quina-days-good-lamar.jpg)


![Modeling D-Forms Ozgcourses.compute.dtu.dk/01237/Ackelman_bridges2007-209.pdf · The recently introduced concept of conical meshes [12] provides a framework to model constructible](https://img.pdfslide.us/doc/110x75/5e883b6819441332205ce1bb/modeling-d-forms-the-recently-introduced-concept-of-conical-meshes-12-provides.jpg)