Embed Size (px)
Citation preview

Quantitative feedback theoryProf. Isaac Horowitz
Indexing terms: Control theory. Feedback
Abstract: In quantitative feedback theory, plant parameter and disturbance uncertainty are the reasons forusing feedback. They are defined by means of a set J8 = \P}oi plant operators and a set 3 = {b}of disturb-ances. The desired system performance is defined by sets of acceptable outputs J^U in response to an inputM, to be achieved for all P e & . If any design freedom remains in the achievement of the design specifications,it is used to minimise the effect of sensor noise at the plant input. Rigorous, exact quantitative synthesistheories have been established to a fair extent for highly uncertain linear, nonlinear and time-varying single-inputsingle-output, single-loop and some multiple-loop structures; also for multiple-input multiple-output plantswith output feedback and with internal variable feedback, both linear and nonlinear. There have been manydesign examples vindicating the theory. Frequency-response methods have been found to be especially usefuland transparent, enabling the designer to see the trade-off between conflicting design factors. The key tool indealing with uncertain nonlinear and multiple-input multiple-output plants is their conversion into equivalentuncertain linear time-invariant single-input single-output plants. Schauder's fixed-point theorem justifies theequivalence. Modern control theory, in particular singular-value theory, is examined and judged to be com-paratively inadequate for dealing with plant parameter uncertainties.
List of principal symbols and abbreviations
Bh
b,b(co)&= {D}dBL(ju)),L0
LQRLQGLTIMIMO& = {P}
P = \Pij]Q = Uu\QFTRCSISOSVT
= {Td) =
set of acceptable outputs in response toinput ulower bounduniversal high-frequency boundary ofacceptable L0(joS), applies for all CJ > coh
upper boundset of disturbancesdecibels, 20 log10
loop transmission and its nominal valuelinear quadratic regulatorlinear quadratic Gaussianlinear time invariantmultiple-input multiple-outputset of LTI plant operators, or plantmatricesplant matrixwithP"1 = [l/Qu],P a matrixquantitative feedback theoryresistor-capacitorsingle-input single-outputsingular-value theoryset of acceptable system response func-tions (matrices in MIMO systems) to com-mand inputsas above, but for disturbance inputsplant template, set of complex numbers
= set of nonlinear plant operators
1 Introduction
This paper is a survey of our work in feedback systems,denoted as quantitative feedback theory (QFT), and its com-parsion with the modern control approach, in particular withsingular-value theory. It is our view that feedback around theconstrained 'plant' is mandatory only because of uncertaintyin its parameters and/or in disturbances entering the plant.Fig. 1A depicts one of the simplest problems: a linear time-invariant (LTI) plant operator p with transfer function P(s),whose output is the system output and can be measured,
Paper 2206D, first received 2nd June and in revised form 2ndSeptember 1982The author is with the Department of Applied Mathematics, WeizmannInstitute of Science, Rehovot, Israel, and the Department of ElectricalEngineering, University of Colorado, Boulder, CO80309, USA
disturbance d not measurable, and command input r(t)measurable. Suppose that p and d are precisely known, thatthe output yr due to r is to be yr = r * h (?) (* denotes con-volution), and that the disturbance component \yd\ <m(f)is given. Then simply insert a prefilter fx between r andp, withp *fi = h or transform Fx (s) = H(s)/P(s), and inject a signalz in Fig. 1A such that \(z + d) *p\ <m(t). This is so even ifp is unstable, for a little thought shows that uncertainty inp and/or d must be invoked to render this method invalid.Uncertainty necessitates feedback around the plant, and asuitable canonic two-degrees-of-freedom structure (see section6.1 of Reference 1) is shown in Fig. IB.
Fig. 1A No feedback needed in absence of uncertainty
oDG X P
C(orY)
N
-1
Fig. 1B Canonic feedback structureC = TRT = (/ + PGY*PGFL = PG
Most of the feedback control literature, both classical andmodern, concentrates on realising a desired input-outputrelation under the constraint of a feedback structure aroundthe plant, as if feedback is a tool in filter synthesis. If so, thenfeedback theory is just a branch of active network synthesis,and its merits should be compared with other techniques suchas active RC etc., active RC elements against the transducersand the constant-gain infinite-bandwidth amplifiers needed inmodern control theory. Such comparisons have never ap-peared.
The true importance of feedback is in 'achieving desiredperformance despite uncertainty'. If so, then obviously theactual design and the 'cost of feedback' should be closelyrelated to the extent of the uncertainty and to the narrow-ness of the performance tolerances. In short, it should bequantitative. But feedback theory has not been quantitative:one hardly finds in the voluminous feedback literature anyquantitative design techniques, or any quantitative problem
IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982 0143-7054/82/060215 +12 $01.50/0 215

statements. This is a fantastic phenomenon: so much teachingand research effort, such a huge literature, but the heart of theproblem is almost ignored. Even the graduate Ph.D. often doesnot know the real reason why feedback is used in control.
2 Linear time-invariant single-input single-outputfeedback systems
In quantitative feedback theory, the uncertainties formulatedas a set of plants &=• {P} and a set of disturbances J^ = {D}.There are specified a set of acceptable command responsetransfer functions ^~= {T} and a set of acceptable disturbance
(40,10,30,100)0,10,60,200)(40,10,60,200X40,1,60,200)(1,1.60,200 ) (1,1,30,100)(40,1,60,200) (1,1,1,200)
b time, s
Fig. 2 Time envelopes and their u> equivalents
response functions JTd = {Td}, to be achieved forAny freedom in doing this is used to minimise in some sensethe effect of sensor noise at the plant input. QFT was firstdeveloped for linear time-invariant (LTI) single-input single-output (SISO) single-loop systems with output feedback only[2, 3 ] . Significant improvements in design execution havebeen made by East and Longdon [4—6]. This single-loopLTI theory is of key importance in solving the nonlinear andmultiple-input multiple-output uncertainty problems, becausethese are rigorously converted into equivalent LTI SISOproblems (see Sections 3 and 4); thus it is now summarised.
2.1 Single-input single-output single-loop L Tl system(Fig. IB)
The first step is to translate the tolerances on $~, if in thetime domain, into co-domain tolerances [3, 7] . If all/* G ^are minimum phase (this forbids only right-half-plane zeros;uncertain right-half-plane poles are allowed), then bounds on
216
I T(jto)\ suffice, in the form
Two examples are shown in Figs. 2a and b, where the finalsimulation results fill the envelope (but not when the dis-turbance response specifications are more severe than thecommand response specifications [3]). At any co — ojj ,the set of points {P(/coi)} is a region in the complex plane,called the plant template Jr'p(P(j<^>\))- The first step is tofind these 3~p for a reasonable number of GJ values; seeReference 3 for examples. In Fig. IB,
T =FL
1 +L
Alog T = A log1 + L
(2a)
(2b)
because there is negligible uncertainty in F (and G). SinceL = GP, the variation in P(jcS) generates via eqn. 2b avariation in log T(jto). The function of G in L = GP is toguarantee that the variation in log T is within the amountallowed by the specifications. Let Lo = GP0 be a nominalloop transmission at a nominal plant P0-
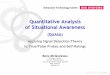
v It is convenientto find the bounds on Lo in the Nichols chart which achievesthis. Fig. 3 is an example of some bounds on Lo (ju>) for theplant shown and specifications of Fig. 2a:
(3)Pi = ki/s i = 1,2, b
Pc = K kj<E[aj,bj]
30 r
aj = 20,50,1,1000
bj = 800,500,60,200000
for/ = l,2,b,c
(4)
-300 -240 -180degrees
-120 -60
Fig. 3 Bounds B(u>) on nominal outer-loop transmission L0(ju)) inthe Nichols chart
IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982

In Fig. 3, it is treated as a single plant k/s3 ,kG [2,24200] 103.The next step is to find a rational L0(s) with sufficient excessof poles over zeros [so G(s) is practical] which satisfies thesebounds. It has been proved [8, 9] that the optimum, Lo lieson its bound at each to, so the designer can see how far he isfrom optimum, and judge whether the addition of more polesand zeros to Lo is justified by the resulting decrease in band-width of Lo. This is the property of transparency, whereinthe designer sees directly the trade-offs between the importantsystem parameters, such as the narrowness of response toler-ances, the extent of plant uncertainty, the complexity of thecompensation (number of its poles and zeros), the resultingloop bandwidth needs and the effect of sensor noise. In thistechnique, the designer works directly with these parametersand easily sees the trade-offs. This is in sharp contrast with the'modern' control technique of minimising a quadratic costfunction at nominal plant values, and trying to control theabove important system trade-offs by varying the variousweights.
The final step in the design is to find F(s) in Fig. IB. Forexample, if the specifications permit — lOdB < |7X/tOi)| <— 2dB, and Z,0(/coi) has been chosen so that — 6 d B <
/(l +£ ( / co i ) ) |<0dB , then \FQ'o3i)\ may have any
degrees-100 -20
-340 degrees-180
bound on L0(j22) ino Nichols chart
Fig. 4 Plant template at OJ = 22 and bound on LQ(j22) due tohigher-order modes
a Template of
fc(22) 104
s(s2 + 0.02s + B)(s2 + 0.04s + 4fl)
atcj = 22 for k: [1, 10],B: [400, 600J
b Forbidden region for Lo(/22) in Nichols chart
IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982
value between - 10 — ( - 6) = - 4 dB and - 2 - 0 = - 2 dBin order to satisfy the bounds on T(ju>i). In this way, boundson |F(/to)| are found, and F(s) is found to satisfy thesebounds.
2.2 Bending modesHigher-order modes of any number and of any extent ofuncertainty are easily and naturally incorporated into thisdesign technique. One simply finds the templates ̂ p (P(/to))at these higher to values in exactly the same manner as in theabove and proceeds in exactly the same way at every step.
•Without them, P(s) -> k/se at large s,the template ofPbecomesa vertical line of lengtlf kmax/kmin, and there emerges a'universal high-to boundary', such as Bh in Fig. 3 whichapplies for all to > some toh value (~ 250 in Fig. 3).
But suppose that in the range of the higher-order modes
(5)s(s2 + 0.02s + B) (s2 + 0.04s + 4B)
with uncertainties 1 < k < 10, 400 < B < 600.The resulting template of P(j22), for example, (i.e. the set
{P(j22}) is shown in Fig. 4a. In this GJ range, the dominatingspecification [3] is |Z,/(1 + L)\ < some value, say 2.3 dB. Ifthe nominal k0 = 1 and Bo = 400, then the resulting boundon Lo (/22)is easily found to be that shown in Fig. 4b. Similartemplates and bounds are determined for a discrete number ofco values, and then Lo (/to) is shaped to satisfy these bounds.
Basically, the same technique is used for disturbanceattenuation; see Reference 3 for details.
By now, many detailed design examples have been done.The techniques have been taught in graduate and under-graduate junior engineering courses, and no particular difficultyhas been encountered. Modern control theory specialists, how-ever, seem to find it difficult, perhaps owing to their estrange-ment from frequency-domain concepts.
_X_| (single loopNl s scale 2) _
2x107
oo I?!
4000 8000 12000 16000J, rad/s
Fig. 5 Tremendous reduction in noise effects (at X) of sensors due tomultiple-loop feedback
(Fig. 2a: P,- uncertainty factors: 40, 10, 60, 200)
217

2.3 Extension to SISO multiple-loop systems [10-13]The technique has been extended to a number of multiple-loop SISO structures, wherein internal variables can be servedand processed for feedback purposes. The great potentialadvantage is the possible vastly reduced effect of sensor noise.An example is shown in Fig. 5 for the problem [11] of Fig.2a. If only outer-loop feedback (y alone) is used, the ampli-fication of noise from sensor 1 at the plant input is given bycurve Si in Fig. 5, for which scale 2 applies. If feedback fromCx is also allowed and properly used, then the amplificationof noise from sensor y is now given by curve S-^ with scale1, which is much less than Sx. But now there is sensor 2, andits noise amplification is curve Af22 (scale 1). The latter can bedrastically reduced by using a third sensor at C2, and then thesensor-2 noise amplification is curve Af23 (scale 1). Sensor-3noise is amplified by curve M33. Of course, this example hasfantastically large uncertainty, and multiple-loop feedbackwould be essential to achieve a practical design.
A technique called 'design perspective' has been developed[12], whereby a detailed multiple-loop design is not needed inorder to see the improvements possible to obtain this infor-mation fairly accurately, by means of rapid approximatecalculations. The designer can thus decide early in the gamethe number of sensors to be used, and, if there are optionsavailable between sensor quality and cost, he has the infor-mation for intelligent decision.
2.4 Uncertain nonminimum-phase plantsIn this case, bounds on both |7"(/co)| and argr(/co) are needed.The same procedure is then followed, resulting, as before, inbounds on a nominal loop transmission L0(jto). However,it may be impossible to satisfy these bounds, and tests for deter-mining this have been given. If this is so, the specificationsmust be relaxed [9].
3 Design for uncertain nonlinear SISO plants [14,15]
In 1975—1976, a breakthrough was made in developing arigorous design technique for highly uncertain nonlinear SISOplants. An important feature is that it permits the ordinarydesign engineer who knows very little (like this writer) aboutnonlinear differential equations to accurately control difficult,highly uncertain, highly nonlinear plants. This is achieved byreplacing the nonlinear plant set W= {w} (which can also betime varying) by an equivalent time-invariant plant set J 3 =
in&> is the equivalent to W with respect to the set of the
desired system outputs Jzf= {a}in the following sense. Im-agine a barrel of all possible plants w in W and a barrel ofall desired plant outputs a of sf. Pick any wt from the^"barrel and any c;- of the ^barrel. Find the plant input xu forwhich w{ gives an output a;- [i.e. a,- = w,-(xy)]. Then thereexists in the & barrel a Pu such that, for the same input xu, itsoutput is aj [aj = Pij(Xjj)]. The designer must first find the set&. This can be done by simply letting Pu(s) = ay(s)/x,7(s),where the circumflex refers to Laplace transform: / (s) = theLaplace transform of fit). Repeat over /, /, giving the set &= {/>,,}. There are various ways of streamlining this process,sometimes even doing a great part of it analytically [16, 18].
It is important to include in the set sf of desired outputsa reasonable sampling of the actual desired outputs the systemis to deliver over its life. This can be done by listing a reason-able sampling of the inputs (command & = {r} and dis-turbance 3 = {D}) and multiplying by Tr(s), Td(s), whereTr, Td are members of the sets of acceptable Tr, Td.
Once £*, the 'equivalent linear time-invariant' (ELTI) plantset, is found, the designer can forget about the nonlinear plantset W and design for the ELTI plant set &. If he can solve218
this ELTI problem, then it is guaranteed that the same com-pensations work for the original highly uncertain nonlinearproblem. The same desirable properties previously listed(systematic procedure, transparency, ease of trade-offs,practicality of compensation) therefore apply to the nonlineardesign. No separate effort is needed to guarantee stability ofthe nonlinear system; this is automatically included. The maindesign effort, beyond that needed for ordinary LTI design, isto solve the nonlinear equations backwards on the computer,for which software packages exist; i.e. given the output, findthe input, which is often much easier than solving it forwards,for example (y)3 y + Ayy + By3 =x. Given y, it is easy tofind*.
By now, over a dozen such design problems have been done[14—16, 18—21] with large uncertainty, defined time-domaintolerances and uniformly excellent results; some of these wereMaster's theses. One was a significant nonlinear flight-controlproblem for AFFDL, WPAFB with c* the controlled output[18].
3.1 Nonlinear performance specificationsThe design technique can handle nonlinear performancespecifications. Fig. 6a is an example of linear system tolerances.If the acceptable response envelope for a unit step command isI, then for a half-unit step it must be II, which is one half of I.It is sometimes highly desirable to have nonlinear performancetolerances; for example, those of Fig. 6b appropriate foroptimal time response in which the plant is being driven hardalmost to saturation until the commanded value is reached,and this is so for a large range of commanded values. Thetechnique can do this. The results in Fig. 6b were achievedfor a nonlinear plant Kxy
2 + K2y = x with [38] uncertainties
3.2 Extensions and improvementsSince 1976, this design technique has been improved inseveral ways:
(a) There was a certain amount of overdesign involved inthe technique, because, even if there was only one nonlinearplant (not a set), an infinite ELTI set would normally emerge.This violates an important principle in feedback theory: 'Ifthere is no uncertainty (of plant parameters or disturbances),then there is no inherent need for feedback'. (Application ofthis principle to the literature would invalidate the vastmajority of designs.) This disadvantage has now been over-come by a technique involving nonlinear compensation in theloop [19].
(b) The procedure was originally restricted to minimum-phase system inputs; now any bounded inputs are allowed[20].
(c) Originally, ad hoc methods were used to handle initialstate values in the plant (see, for example, Reference 18): nowa systematic method has been developed [21].
(d) The technique was originally confined to finite sets(which could be arbitrarily large) of command and disturbanceinputs. Existence theorems have been found for infinite inputsets [22], but they are not as yet well suited for numericaldesign.
4 Uncertain multiple-input multiple-output plants[17,23-29]
Fig. IB can be used to represent an n x n multiple-inputmultiple-output (MIMO) system if F, G,P, T are each n x nmatrices, and & = {P} a set of matrices due to plant un-certainty. There are n2 closed-loop system transfer functionstu relating output / to input/ transforms:yt(s) = tu(s)rj(s). Ina quantitative problem statement, there are given tolerancebounds on each r,y-, giving n2 sets sf^ = atj of acceptable ttj.
IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982

To appreciate the difficulty of this problem, note the verycomplex expression for tn below, for n = 3, even whensimplified by letting the compensation matrix G in Fig. 1B bediagonal, G ?= [gt]:
hi = {[Pnfngi + P12/21S2
[(1
~ [P2lfllgl
[Pl2g2 (
\P3lfllgl +P32f2\g2
\P23P\2g2g3 " (
{(1 + Pll£l) [(1
}/
~P23P32g2g3\ ~P2\g\ [Pl2£2 Q
- P32P \3g2g3\ +P3\g\\P \2P23g2g3
-P 13̂ 3 0 + P22S2)] }
(6)
There are n2 = 9 such expressions (all have the same denomi-nator), and there may be considerable uncertainty in the nineplant pij elements. The objective is to find nine //;- and threegt such that ttj stays within its acceptable set s/xi, no matterhow the Pij may vary. Clearly, this is a horrendous problem.
tolerances for input u(t)
tolerances for input u (t)/2(nonlinearlyrelated tou(t)tolerances)
tolerances for input u(t) 12(I i nearly related to u(t) tolerances)
time
Fig. 6 Design example of nonlinear tolerances Kxy2 + K2y =x and
simulation results
a Linear and nonlinear tolerances on step response
b Case Kx K2
1234
1010
11
1011
10
Even the stability problem alone, ensuring the characteristicpolynomial denominator of eqn. 6 has no right-half-planezeros for all possible ptj, is extremely difficult.
4.1 Single-loop equivalentsIn this technique, justified by Schauder's fixed-point theorem[23], it is never necessary to consider the characteristicpolynomial. Simply replace the n x n MIMO problem by nsingle loops and n2 prefilters see Fig. 7 for n = 3. In Fig. 7,P l = [1/Quv]. a nd the uncertainty in P generates sets &uv =
du = — — + ——
is any member of thethe 01/in alj,j = 2,
n generated by the
(7)
and
d13 q\ Qn
d23 oG2 \ Q22
•23V23
w G3 \ 3̂3 1
S y 3 T RG 3
"32 I -1
d33CG3 \ Q33
r33y33
Fig. 7 Final equivalent single-loop feedback structures which replacethe3X 3 MIMO problem
0.2 0.5 1 2a uo.rad/s
0.1 0.2 0.5b <*>.
10 20
Fig. 8 u>-domain bounds
a Forb For fi2,t32 3 X 3 MIMO example
In Fig. la, the SISO design problem is to find/,! =giQn ,fu such that the output is a member of the set J ^ n for allQn in <£?n and for all dn \n@. Similarly, in Fig. 1b, findL\ —g\Qn,f\2 so that its output is insZn forall(?ii i n ^ nand all dl2 in ̂ 1 2 etc. Note that L\ is the same for all theSISO structures in the first row of Fig. 7 etc. In each of thesethree structures, the uncertainty problem (due to the sets&u,3U) gives bounds on the level of feedback L \ needed, and sothe toughest of these bounds must be satisfied by Lx •
If the designer designs these SISO systems to satisfy theirabove stated specifications, then it is guaranteed that thesesame fuv, gu satisfy the MIMO uncertainty problem. It is notnecessary to consider the highly complex system character-istic equation (denominator of eqn. 6) with its uncertain pti
plant parameters. System stability (and much more than that)for all P in & is automatically guaranteed.
IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982 219

4.2 Design exampleThe power of the technique is illustrated by presenting theresults of Reference 25, done as a Master's thesis by a typicalaverage graduate student. Here the plant and uncertainties are
system with plant matrix P — [ptj], the condition is that
lirn^ \PnP22\ > \P12P211 o r vice versa for allp i
Pit = (8)s2 + Es + F
i 4 u e [ 2 , 4 ] A12S[0.5, 1.1] ,422G[5, 10]
A31 e [- 0.8, - 1.8] all other Au = 0
Bne [-0.15,1] Bne[-i,-2]
B13e[l,4] (9)
B21 e [1,2] 522G[5,10] B23S[-l,-4)
B31G[-l,-2] B32E [15,25]
^33 e [io, 20]
EG [-0.2,2] Fe[0.5,2]
Note that p12 is always nominimum phase and pn is so farpart of the plant parameter range. Also, the plant is unstablefor part of the parameter range.
Command performance specificationsThe command performance specifications are in the fre-quency domain, shown in Fig. &z for the three diagonaltit ( /=1 — 3) and in Fig. Sb for 112, t32. The other off-diagonal elements ti3, t21, t23, t3l are to be 'basically non-interacting', |fuu(/co)| < 0.1 for all co and for all P in &.
Simulation resultsThe design details are given in Reference 25. Typical andextreme step responses are shown in Fig. 9 over the set &.
Transparency and trade-offConsiderable experience has been gained in applying thistechnique [17, 23-27]. It is highly transparent, revealingmeans for minimising the loop bandwidths needed and fortrade-off between the loops (see especially Reference 25).For example, suppose sensor 3 is much noisier than theothers, so that it is desirable to reduce its loop bandwidth.This can be done by shifting more of the burden to one orboth of loops 1 and 2. Thus, in Fig. 10, IZ,3OI > IZ-iol, \L20\by about 15 dB in the low co range. But 1L3O| was deliberatelymade — |Z,20| and much less than |L1OI (which was sacrificed)for co > 250. We could have also sacrificed L20 and therebyimproved L30 even more, or made an even greater sacrifice of
4.3 Recent advancesThe above dealt with n x n MIMO plants in which only then outputs are available for feedback purposes. The techniquehas since been extended to n x n plants in which internalstates are also available for feedback. The result is to replacethe uncertain n x n system by a number of single-inputsingle-output uncertain multiple-loop systems. The solutionsof the latter SISO problem are guaranteed to solve the MIMOproblem [28].
The technique requires a fixed-point theorem for itsrigorous justification. Also, it involves a certain amount ofinherent overdesign because, for example in Fig. la, there issome correlation between the tul appearing in dn of eqn. 7and the elements QXu in eqn. 7. This correlation is not nor-mally used (Reference 25 suggests a method for doing so).Finally, a certain diagonal dominance condition as s -> °° mustbe satisfied for the technique to be applicable. For the 2 x 2
220
o r p ^(10)
(In Rosenbrock's technique [30], this condition must besatisfied for all co.) It has been shown [29] that expr. 10 isinherent and necessary for any technique that may ever beinvented, but only if arbitrary small sensitivity over arbitrary
8
Fig. 9 Representative time-domain step responses
IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982

large bandwidth is desired. However, the technique of Section4.1 always requires this, even for less demanding designs, andis therefore overdemanding in that respect. However, thenewest extension [29] requires it also only for arbitrarysmall sensitivity over arbitrary large bandwidth and so inthis respect is much better. Another advantage of this newestextension is that fixed-point theory is not needed for itsjustification; simple logical arguments suffice. A third ad-vantage is that there is considerably less overdesign in the newtechnique.
cu, rod / s10 20 50 100 200 500
2 0 -
Fig. 10 Trade-off between loops in 3 X 3 design
\LM\
Disturbance attenuationThe above has emphasised response to commands, but thesame approach is used for disturbance attenuation. The set ofacceptable Td system response functions (n2 of them) to dis-turbances must be formulated, and then the duv in Fig. 7contain the actual disturbance components as well. Design iseasier because there is then no command input, only thedisturbance input duv.
4.4 Digital compensatorsThe modern tendency is to use microprocessors as compensatorsin the feedback loops, which are, of course, essentially digitalnetworks. Our design theory is particularly suited to considerthe precautions that must be taken because of the nonminimum-phase property of the digital network. The latter property isseen by means of the w transformation, w = u + jv = (z — 1)/(z + 1) with z = exps7\ where T is the sampling period. Theunit circle in the z-plane transforms into the imaginary z;-axisin the w-plane, and so one can use it as the new frequencydomain in exactly the same manner as /co in the s-plane, i.e.frequency-domain compensation, plant uncertainty, and thedesign techniques of the preceding Sections. It is easy to showthat every practical sampled device has a w transfer with azero at w = 1 (see sections 11.11 and 11.15 of Reference 1)and so is nonminimum phase. This means 90° extra phase lag.at v = 1 (which corresponds to co = cos/4, where cos = 2n/T,the sampling frequency).
5 Uncertain nonlinear MIMO plants
The nonlinear technique of Section 3 and the MIMO techniqueof Section 4 have been combined, giving a design technique foruncertain nonlinear nx n MIMO plants. The set ^ o f thenx n nonlinear plants is replaced by a set & = {p} of n x ntransfer-function matrices, and then the technique of Section4 is used to solve this nx n LTI MIMO problem. This set & isequivalent to the nonlinear set W with respect to the entireset ja^= {a} of desired n system outputs. An element a
consists of n time functions, corresponding to an ^-vector ofacceptable outputs in response to an rc-vector of commandinputs or disturbances. The procedure is illustrated by twodesign examples [17] with the same plant but differentperformance specifications.
5.1 Design example 1
Plant (2 x 2)
A + Ay\ + B{yx + l)y2 =k1x1
y2(\+Cyx)+Ey\ +dy2 = k2x2
Uncertainties
A G [0.04,0.05] B,CE [0.08, 0.12]
D<E [0.8,1.2] £<E[0.8, 1.5] kxk2 G [0.5, 2.5]
all independently
(11)
Performance tolerancesIn the first problem, the inputs are step commands Mu(t),only one at a time,M& [— 5, 5] . In response to ri =Mu(t),it is required that yt E [0.4M, 0.6M] within one second, >0.9M for all t>3.5, and overshoot must not exceed 5%;\yk(.t)\max < 0.1 M for k ± i (see Fig. 13).
Design executionAnalytic models were chosen for yx, y2 in response to rY =Mu(t), and (and vice versa):
= M[l-Xexp(-ar)-( l-X)exp(-rO](12)
y2 =
Fig. 11 Design example: ^-domain bounds
The parameters M, X, a, r, N, 0 were chosen compatible withthe tolerances. Those that passed were used to generate co-domain trial bounds on |rfl-(/co)| and |r/fe(/co)|, as shown assolid lines in Fig. 11. Then response functions which violatethese trial bounds were tried, resulting in the dashed lineenlargements in Fig. 11. These forms chosen for yi, y2 with sofew free parameters certainly do not appear a good samplingof acceptable plant outputs. This is precisely the rigour-defying kind of short cut which very often works. The nonlinearequations appear to be well behaved, suggesting that smoothtime responses of the form of eqn. 12 can be achieved. If, inpractice, the resulting design gives y(t) which significantlyviolates this assumption, then a more general form for >>,-, ^fe
will be used, which permits a larger sampling. This was notfound necessary.
IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982 221

LTI-equivalent plant templates and resulting designThe next step is to find the LTI-equivalent plant sets. Samplesof y vectors were taken of the form of eqn. 12 and* = W~lywere obtained analytically from eqn. 11. 2 x 2 JT, Y matriceswere formed given the LTI equivalent P~x =XY~X. At any<*> = w i» {QuuU^i)} occupies a region in the complex plane,denoted as its template S~Pu (to); the larger ^~pw> the largerthe uncertainty. Some of these are shown in Fig. 12. Thedesign technique detailed in Reference 25 is followed to com-plete the design. Representative and extreme simulationresponses are shown in Fig. 13. The assigned tolerances werevery nicely satisfied.
ii•
iii iv
Fig. 12 Templates of LTl-equivalent plants
a Qu templates, problem 1b Q22 templates, problem 1
5.2 Design example 2It is important to recall that this design was made only forcommand inputs rx, r2 one at a time. Several runs were madenevertheless, to see the results with both simultaneouslyapplied rx =Mxu{t), r2 = M2u(t). These are shown in Fig. 14.It is seen that they are definitely not the superposition of theresults obtained when r1} r2 were applied one at a time. Toexplain this divergence from superposition, templates ofQn > Qn were calculated on the assumption of superpositionof outputs. The templates are shown in Fig. 15 for co = 1.Comparing with Fig. 12, it is seen that they are exceedinglylarger, and so it is not at all surprising that a design made onthe basis of the templates of Fig. 12 should be woefullyinadequate for the templates of Fig. 15. The design techniqueis guaranteed only for the set of system inputs for which thedesign is executed. Thus a different design must be made if thecommand inputs can occur simultaneously. We shall also usehere the nonlinear compensation technique of Reference 19.
Now the command input is
rx = Mu(t) cos 6
r2 = Mu(0 sin0 6: [0,360°]
M: [2, 5]
(13)
There is inserted in front of the plant (Fig. 16) (W:y = Wx)a nonlinear network (A: x = Av) such that WA: y — WAv isLTI for all inputs v at a nominal W = Wo.
This method, previously applied only to SISO plants, isused here as follows. We want LTI response y=H*v(* denotesconvolution), and for simplicity let H be diagonal with
ft ftyi = \ Vi dz y2 = \ v2 dz
Jo Jo
The equation H* v= Wox defines (see Fig. 16) A: JC = Av.
-0.3 -
1.0
0.5
0.2
-0.2
time.
time s
Fig. 13 Step responses, design 1
Representative normalised step responsesa yt, due to r,b 10^j,due to r1c J>J , due to r2d 10y,, due to r2
10
222 IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982

Eqn. 11 withj>j = vx ,y2 = v2 becomes
vx + Ao\ \ vx dz\ + B0\ \vx dz
v2 jvx dz dz + Eo
jv2dz = kxoxx
(H)= £20*2
time s
Fig. 14 Outputs due to simultaneous step inputs, four runs
ABCD
r, = M,«(f)r2 = M2u(t)
55
— 5— 5
— 555
— 5
defining A, with the nominals used the same as before. Thenew effective LTI plant is WA, in place of W. Following thesame procedure as in design 1, the new LTI equivalent plantis derived with the resulting plant templates shown in Fig. 16.Compare co = 1 in Fig. 16 with Fig. 15 to see the enormousdecrease in equivalent uncertainty, achieved by use of thenonlinear A network. The reason is that, without A, non-linearity by itself (even with no uncertainty) generates anuncertain linear equivalent set. The nonlinear A removesmost of the uncertainty due to the nonlinearity, and so whatremains is the actual uncertainty. There is therefore a muchmore economical design in terms of the loop gain and band-width needed.
W
Fig. 15 Plant templates due to simultaneous step inputs, no cancella-tion designDesign problem 2, no cancellation
Fig. 16 Plant templates due to simultaneous step inputs, cancellationdesign
Design problem 2, cancellation designa Qu '• <*> = 0 . 1 , 0 . 2 , 0 . 5 , 1 , 2 , 5 , 1 0 , 2 0 , 5 0 , 1 0 0
The next steps are the same as in design 1. Simulationresults over a range of M, d for rx =M cos 9, r2 =M sin 0,ME [2, 5] , are shown in Fig. 17.
Disturbance attenuation and command responseThere is no basic difference in the design technique for dis-turbance attenuation alone or with simultaneous commands.Consider the actual system inputs and combinations of systeminputs the system is subjected to in its actual real-life operatingenvironment. Formulate the desired plant outputs in responseto these inputs, but be sure that the plant is physically capableof delivering such outputs. In this way, obtain a representativeset of the actual plant outputs over the life of the system: callit set sf= {a(t)}. Find &, the LTI equivalent of the nonlinearplant set ^ with respect to the se t j^ . Thereafter^ replaces
IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982 223

yjT, and so one is dealing with LTI problems. If these LTIproblems are solved, then it is guaranteed that the nonlinearproblems are solved, but only for those system inputs whichgive ja^. The equivalence of & to W is only with respect to
6 Discussion and comparison with modern controlmethods
Modern control theory ignored the uncertainty problem for avery long time. It first concentrated on eigenvalue realisation(pole placement) and emerged with the fantastic (from thefeedback point of view) result of infinite-bandwidth amplifiersas compensators, and was even proud of this, because no'dynamics' (poles and zeros) were needed in the compensation.This is comparable with parastic capacitance being neglected ina study of wideband amplifiers, or noise being neglected in astudy of high-gain amplifiers. The practical designer may
of1.0
0.5
sometimes emerge with compensation which is finite as s -> °°,but he knows in what co range the inevitable poles are allowedto occur. In as much as the cost of feedback is precisely in thebandwidths of the compensation, there is no excuse for this ina presumably serious study of the feedback problem.
Originally, all the states had to be measured. After a fewyears of this, modern control theorists discovered that not allthe states could usually be measured, which ushered in the'observer' years of estimating the unavailable states from themeasurable ones. After a few more years of this, moderncontrol theorists became aware of the uncertainty problem,which brings us to the present 'robustness' period.
The solution from modern control theorists to the un-certainty problem is more patching of Kalman's linear quadraticregulator (LQR) theory, which is the foundation of themodern design approach to LTI MIMO systems. LQR theoryis mathematically impeccable as a solution to a nonengineeringfeedback problem, because it emerges with infinite-bandwidth
2 utime s
0
-0.3
0.5
0
time s2 ' U 6
\
f1 .time s
0 t i m e ' S 5
-0.5
time s 5 0
time s0 " 5
-0.50
-0.5
-0.5 h
Fig. 17 Step responses, design 2
Normalised step responsesftr2adgi
—=9ee0
M cos 6M sin 6
0 °= 120°= 210°= 300°
= 30= 150°= 240c
= 330c
c Q = 90°f 0 - 180°i 9 = 270'
224 IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982

compensators, which proves that an unrealistic problem hadbeen formulated. As explained by Athans [31], the answer touncertainty lies the in stochastic LQG (linear quadraticGaussian) approach, wherein plant and other uncertaintiesare somehow accounted for by means of Gaussian randomzero-mean inputs with suitable covariance matrices. It is amatter of faith that uncertainty can be accounted for in thisway, because no proof has been offered. The reason for thisapproach is simple. Optimal LQR theory cannot cope directlywith parameter uncertainty and emerge with its 'elegant'Ricatti equation and constant gain compensation, but it canhandle added inputs, and so one tries to learn somehow (byexperience, iteration etc.) to handle the real problem, thatof uncertainty, via suitable random inputs and weightingmatrices.
For a while, the answer lay in nominal sensitivity andstability margins, nominal because LQG design is always ata fixed nominal set of parameters. There was much pride inthe wonderful stability margins achieved by LQR theory(wonderful only because of the neglect of the bandwidthproblem). This was easily shown as inadequate, because thesensitivity function is S = (dT/T)/(dP/P), and so dT/T =S dP/P. Even if \S\ is small, one need only make \dP/P\ largeby having poles or zeros near the /co-axis. The obvious answeris that sensitivity must be related to the extent of uncertainty.
6.1 Singular-value theory (SVT)The latest and definitely improved answer of modern controltheory to the uncertainty problem is to examine the actualuncertainty, and then to somehow incorporate it into theLQR (or LQG) procedure. The singular values of a matrix Aare scalar functions which are an overall gross matrix para-meter, used to try to simulate the transfer function of an SISOdevice [32]. They are not easy to calculate, as they are thesquare root of the eigenvalues of A * A versus co. Themaximum and minimum values amax [A] and omin [A] areused. In order to avoid having to calculate them over theuncertainty set & , one deals with nominal plant Po andobtains a bound on the uncertainty by letting/• = [/ + V],P0
(/co) and finding omax [V(ju>)] </m(co), the upper boundover the plant variation matrix K(/co). Stability is assured ifOmax [L/(I+--L)] < l//m(co) for all co (eqn. 17 of Reference32). This gives stability constraints on loop matrix L and on\L\ in the low co range, from amin. These constraints on L arein turn related to LQG weighting factors, and so constraintsare thereby imposed on the latter, giving a first crack at anLQG design. Experimentation with weighting functions bychecking against time-domain simulations is usually necess-ary, because LQG minimises a single scalar index, and sothere is no direct control over time responses.
Comments on SVT design(i) Phase information is lost in singular values as they are
positive real functions of co, and so the stability constraintstend to be very conservative. For example, let a scalar P =k/(s + a), with uncertainties k: [1, kx ], a: [1, ax ] . After someeffort, it was found that the optimum nominals are k0 =(1 + *x)/2, a0 = (1 + ax)/2, giving lm (0) = 0 - l ) /0 + 1),0 = kxax. The stability constraint gives |Z,(/0)/(l +Z,(/0))| <(0 + l ) / ( 0 - l ) . At larger co, this tends to |L(/co)/[l +Z-(/co)]|< ( X + 1)/(X-1), \ = kx. Suppose X= 10, 0 = 100; then, atlarger co, \L/(\ + L)\ < 1.74dB, which corresponds to anapproximately 55° phase margin. If X = 40 (possible in flightcontrol), then at larger co the bound is 0.43 dB, forcing a phasemargin of about 73°, which is much higher than needed. Thismeans that \L\ must decrease slower than inherently necessary.Modern control theorists boast about these large phase
margins, but do not realise that the resulting slow decrease of\L\ gives a much larger sensor noise effect without gettinganything needed in return. Our experience has been that SISOconstraints and costs of feedback are accentuated in MIMOdesigns. Consider the 2 x 2 plant P = [kfj/s]. Taking k(i: [1,5], ktj: [0.2, 0.8] for the uncertainties and the nominalvalues as the average values, the result is lm = 1.6, so that11,7(1 + Li)\ < 0.62 for all co, which is a ridiculous constraintas it would force \Lt\ to decrease very slowly until the requiredgain margin has been achieved.
(ii) Doyle and Stein [33] emphasise 'unstructured' uncer-tainties, which correspond to totally uncertain plant phase atlarge co. While this is true at very large co, it is definitely notso in the crossover region in the vast majority of realisticcontrol problems. They argue that well before the bendingmodes (in, say, the flight-control problem), there is no phaseinformation about the plant. This is certainly untrue in theflight-control system. Their motivation is obvious, as theabove unduly large margins would be justified if there really istotal phase uncertainty. The true region of unstructureduncertainty in realistic designs occurs mostly at much largerco, where \L\ is so small that phase no longer matters.
(iii) A good general design philosophy for MIMO systemsshould approach a good design method when applied to SISOsystems. However, the singular-value approach does not: itretains all its disadvantages.
(iv) A good design technique should not be sensitiveto the choice of nominal plant values. This is so in the QFTtechniques previously presented: it matters not what values arechosen as nominal. However, lm above is very sensitive to thechoice of nominal values. Thus, in the above scalar example
.of comment (i), if k0 = 1 is chosen, then lm = 4 and\L/(l + L)\ < 0.25, which is a ridiculous constraint. It is not sosimple to find the nominal plant which minimises lm, even inthe scalar case; it appears very difficult to do so in the MEMOcase.
(v) Even at best, the singular value is a global matrixparameter. Thus there is no control of the individual matrixelements, nor trade-off between the individual loop trans-missions as is easily achieved in QFT.
(vi) The relation between uncertainty and the actualtime responses of the individual n2 transmissions is veryindirect. Note the steps: uncertainty -*• search for optimalnominal -> search for singular values (with loss of phaseinformation)->• constraints on L for stability etc. -•con-straints on weighting functions in LQG -» design -> full staterecovery design ->• simulate to see actual time response anduncertainty effects -*• weighting functions iterate. Manyjudgments must be made in course of the design [32—34].
(vii) SVT does not apply to nonlinear uncertain plants,(viii) Doyle and Stein [33] note that 'a single worst-case
uncertainty magnitude (is) applicable to all channels. Ifsubstantially different levels of uncertainty exist in variouschannels, it may be necessary to scale the input-output vari-ables . . .'. This is a serious criticism, and they offer no proofthat scaling is effective, nor any ad hoc examples. One might besceptical whether it can help, since sensitivity is a normalisedfunction.
(ix) It was noted in Section 4.4 how a quantitative designis suitable for digital compensation, because the loop trans-missions are the design tools and the emphasis is on theirbandwidth economy. In constrast, in LQR (which includessingular-value design), constant-gain infinite-bandwidth ele-ments emerge, and there is no inkling as to the co range overwhich the so-called 'constant' gain must be maintained.
It is urged that modern researchers in the uncertainty prob-lem free themselves from the straitjacket of LQR theory.
IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982 225

Its mathematics, its scalar figure of merit at a fixed nominalparameter set, its assumption of all states measurable are allwoefully unsuited to quantitative feedback synthesis. Forexample, in the SISO problem of Fig. \b with only twodegrees of freedom, is it not much simpler to optimise ona two-product analytic function space? LQR has not beenshown to cope properly even with this simple uncertaintyproblem.
6.2 Numerical methodsNumerical methods which exploit the power of moderncomputers have been developed [35—37]. They can be quiteuseful to the practical designer, but do not by themselvesconstitute a theory. They are best used in conjunction with aquantitative theory which provides a good initial first try.
7 Acknowledgment
This research was supported in part by the National ScienceFoundation grant 8101958 at the University of Colorado.
8 References
1 HOROWITZ, I.: 'Synthesis of feedback systems', (Academic Press,1963)
2 HOROWITZ, I.: 'Fundamental theory of linear feedback controlsystems', Trans. IRE, 1959, AC4, pp. 5-19
3 HOROWITZ, I., and SIDI, M.: 'Synthesis of feedback systems withlarge plant ignorance for prescribed time domain tolerances', Int.J. Control, 1972, 16, pp. 287-309
4 LONGDON, L., and EAST, D.J.: 'A simple geometrical technique',ibid., 1979, 30, pp. 153-8
5 EAST, D.J.: 'A new approach to optimum loop synthesis', ibid.,1981, 34, pp. 731-748
6 EAST, D.J.: 'On the determination of plant variation bounds foroptimum loop synthesis', ibid, (to be published)
7 KRISHNAN, K., and CRUICKSHANKS, A.: 'Frequency domaindesign of feedback systems for specified insensitivity of time-domainresponse to parameter variation', ibid., 1977, 25, pp. 609—620
8 HOROWITZ, I.: 'Optimum loop transfer function in single-loopminimum-phase feedback systems', ibid., 1973, 18, pp. 97—113
9 HOROWITZ, I., and SIDI, M.: 'Optimum synthesis of nonminimum-phase feedback systems with parameter uncertainty', ibid., 1978,27, pp. 361-386
10 HOROWITZ, I., and SIDI, M.: 'Synthesis of cascaded multiple-loopfeedback systems with large plant parameter ignorance',j4utomatica,1973, 9, pp. 589-600
11 HOROWITZ, I., and WANG, T.S.: 'Synthesis of a class of uncertainmultiple-loop feedback systems', Int. J. Control, 1979, 29, pp.645-668
12 HOROWITZ, I.,andWANG,T.S.: 'Quantitative synthesis of multiple-loop feedback systems with large uncertainty', Int. J. Syst. Sci.,1979, 10, pp. 1235-1268
13 HOROWITZ, I., and WANG, B.C.: 'Quantitative synthesis of uncer-tain cascade feedback systems with plant modification', Int. J.Control, 1979, 30, pp. 837-862
14 HOROWITZ, I.: 'A synthesis theory for linear time-varying feed-
back systems with plant uncertainty', IEEE Trans., 1975, AC-20,pp. 454^63
15 HOROWITZ, I.: 'Synthesis of feedback systems with non-lineartime-varying uncertain plants to satisfy quantitative performancespecifications', IEEE Proc, 1976,64, pp. 123-130
16 HOROWITZ, I., and SHUR, D.: 'Control of a highly uncertainVan der Pol plant', Int. J. Control, 1980, 32, pp. 199-219
17 HOROWITZ, I., and BREINER, M.: 'Quantitative synthesis of feed-back systems with uncertain nonlinear multivariable plants', Int. J.Syst. Sci., 1981, 12, pp. 539-563
18 HOROWITZ, I. et al.: 'Research in advanced flight control design',AFFDL TR-79-3120, Jan. 1980
19 HOROWITZ, I.: 'Improvement in quantitative nonlinear feedbackdesign by cancellation', Int. J. Control, 1981, 34, pp. 547-560
20 HOROWITZ, I.: 'Quantitative synthesis of uncertain nonlinearfeedback systems with nonminimum-phase inputs', Int. J. Syst.Sci., 1981,12, pp. 55-76
21 HOROWITZ, I.: 'Nonlinear uncertain feedback systems with initialstate values', Int. J. Control, 1981, 34, pp. 749-764
22 HOROWITZ, I.: 'Feedback systems with nonlinear uncertainplants', Int. J. Control, 1982, 36, pp. 155-171
23 HOROWITZ, I.: 'Quantitative synthesis of uncertain multiple input-output feedback systems', ibid., 1979, 30, pp. 81-106
24 HOROWITZ, I., and SIDI, M.: 'Practical design of multivariablefeedback systems with large plant uncertainty', Int. J. Syst. Sci.,1980, 11, pp. 851-875
25 HOROWITZ, I., and LOECHER, C: 'Design of a 3 X 3 multivari-able feedback system with large plant uncertainty', Int. J. Control,1981, 33, pp. 677-699
26 HOROWITZ, I. et al.: 'A synthesis technique for highly uncertainand interacting multivariable flight control systems'. Proceedings ofNAECON conference 1981, pp. 1276-1283
27 HOROWITZ, I. et al.: 'Multivariable flight control design withuncertain parameters (YF16CCV)'. Report to be published byAFFDL, WPAFB, 1982
28 HOROWITZ, I.: 'Uncertain multiple input-output systems withinternal variable feedback', Int. J. Control, (to be published)
29 HOROWITZ, I.: 'Improved design technique for uncertain multipleinput-output feedback systems', ibid., (to be published)
30 ROSENBROCK, H.H.: 'Computer-aided control system design'(Academic Press, 1974)
31 ATHANS, M.: 'Role and use of the stochastic LQG problem incontrol system design', IEEE Trans., 1971, AC-16, pp. 529-552
32 DOYLE, J.C., and STEIN, G.: 'Multivariable feedback design:Concepts for a classical/modern synthesis', ibid., 1981, AC-26,pp. 4-16
33 STEIN, G., and DOYLE, C: 'Singular values and feedback: Designexamples'. Proceedings of Allerton conference on circuit theory,1978, pp. 461-470
34 DOYLE, J.C., and STEIN, G.: 'Robustness with observers', IEEETrans., 1979, AC-24, pp. 607-611
35 ZAKIAN, V.: 'New formulation for the method of inequalities',Proc.IEE, 1979,126, (6), pp. 579-584
36 DAVISON, E., and FERGUSON, L.: 'The design of controllers forthe multivariable robust servomechanism problem using parameteroptimisation',IEEE Trans., 1981, AC-26, pp. 93-110
37 GOLUBEV, B.: 'Design of feedback systems with large parameteruncertainty'. Ph.D. thesis, Department of Applied Mathematics,Weizmann Institute of Science, Rehovot, Israel, 1982
38 HOROWITZ, I., and ROSENBAUM, P.: 'Nonlinear design forcost of feedback reduction in systems with large plant uncertainty',Int. J. Control, 1975, 21, pp. 977-1001
226 IEEPROC, Vol. 129, Pt. D, No. 6, NOVEMBER 1982