Embed Size (px)
Citation preview

Ž .Computer Networks 31 1999 169–189
Quality-of-service in packet networks: basic mechanisms anddirections
R. Guerin ), V. Peris´IBM, T.J. Watson Research Center, P.O. Box 704, Yorktown Heights, NY 10598, USA
Abstract
Ž .In this paper, we review the basic mechanisms used in packet networks to support Quality-of-Service QoS guarantees.We outline the various approaches that have been proposed, and discuss some of the trade-offs they involve. Specifically,the paper starts by introducing the different scheduling and buffer management mechanisms that can be used to provideservice differentiation in packet networks. The aim is not to provide an exhaustive review of existing mechanisms, butinstead to give the reader a perspective on the range of options available and the associated trade-off between performance,functionality, and complexity. This is then followed by a discussion on the use of such mechanisms to provide specificend-to-end performance guarantees. The emphasis of this second part is on the need for adapting mechanisms to the differentenvironments where they are to be deployed. In particular, fine grain buffer management and scheduling mechanisms maybe neither necessary nor cost effective in high speed backbones, where ‘‘aggregate’’ solutions are more appropriate. Thepaper discusses issues and possible approaches to allow coexistence of different mechanisms in delivering end-to-endguarantees. q 1999 Elsevier Science B.V. All rights reserved.
Keywords: QoS mechanisms; Real-time traffic; Scheduling; Buffer management; Aggregation
1. Introduction
The Internet is a continuously and rapidly evolv-ing entity, that is being used by an increasingly largenumber of applications with diverse requirements. IPtelephony is one of many new applications drivingthe need for substantial changes in the current Inter-net infrastructure. Specifically, the emergence of ap-plications with very different throughput, loss, ordelay requirements is calling for a network capableof supporting different levels of services, as opposed
) Corresponding author. Current address: Department of Elec-trical Engineering, Rm. 367 GRW, 200 South 33rd Street,P h ila d e lp h ia , P A 1 9 1 0 4 -6 3 9 0 , U S A , E -m a il:[email protected].
to a single, best-effort level of service which is therule in today’s Internet.
Providing different levels of service in the net-work, however, introduces a number of new require-ments, that can be classified along two major axes:control path and data path. New data path mecha-nisms are the means through which different serviceswill be enforced. They are responsible for classifyingand mapping user packets to their intended serviceclass, and controlling the amount of network re-sources that each service class can consume. Newcontrol path mechanisms are needed to allow theusers and the network to agree on service definitions,identify which users are entitled to a given service,and let the network appropriately allocate resourcesto each service.
1389-1286r99r$ - see front matter q 1999 Elsevier Science B.V. All rights reserved.Ž .PII: S0169-7552 98 00261-X

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´170
Data path mechanisms are the basic buildingblocks on which network QoS is built. They imple-ment the actions that the network needs to be able totake on user packets, in order to enforce differentlevels of service. As a result, the paper’s first goal isto provide a broad overview of the generic data pathapproaches that have been developed to control ac-cess to resources in packet networks.
Resources that networks need to manage in orderto support service differentiation primarily includebuffers and bandwidth. The corresponding mecha-nisms consist of buffer management schemes andscheduling algorithms, respectively. Buffer manage-ment schemes decide which packets can be stored asthey wait for transmission, while scheduling mecha-nisms control the actual transmissions of packets.The two are obviously related, e.g., scheduling fre-quent packet transmissions for a given flow, i.e.,allocating it more bandwidth, can help reduce itsneed for buffers, and conversely limiting the amountof buffer space a flow can use impacts the amount ofbandwidth it is able to consume.
This paper does not attempt an exhaustive reviewof all possible scheduling and buffer managementschemes. Instead, its aim is to identify the basicapproaches that have been proposed and classifythem according to the design trade-off they repre-sent. In particular, it is important to understand how
Ždifferent schemes fare in terms of fairness access to. Žexcess capacity , isolation protection from excess
. Žtraffic from other users , efficiency number of flowsthat can be accommodated for a given level of
. Žservice , and complexity both in terms of implemen-.tation and control overhead .
For example, certain buffer management schemesmaintain per flow buffer counts and use that infor-mation to determine if a new packet should beaccommodated. Alternatively, other schemes basesuch decisions on more global information such asbuffer content thresholds and service type indicatorsin packet headers. The finer granularity of per flowinformation has benefits in terms of fairness andefficiency, but comes at the cost of greater complex-ity. Scheduling algorithms face similar trade-offs.For example, schedulers based on the weighted fair
w xqueueing algorithm 14,47 can be used to give rateand delay guarantees to individual flows, while class
w xbased mechanisms, e.g., CBQ 19 , provide aggre-
gated service guarantees to the set of flows mappedinto the same class. Here, the trade-off is againbetween fairness and efficiency, and complexity.
In Sections 2 and 3, we illustrate through a se-lected set of scheduling and buffer managementschemes, the many alternatives available to networkdesigners to control how user packets access networkresources. As mentioned above, the emphasis is justas much on reviewing the basic methods that havebeen developed as on highlighting trade-offs.
Trade-offs are not the prerogative of data pathmechanisms, and very similar issues exist on thecontrol path. This applies to both the type of servicesavailable and how they can be requested. For exam-ple, services can vary greatly in the type of guaran-tees they provide. Service guarantees can be quanti-tative and range from simple throughput guaranteesto hard bounds on end-to-end delay and losslesstransmissions. Alternatively, some proposed serviceguarantees are qualitative in nature, and only stipu-late ‘‘better’’ treatment for some packets, e.g., they’llgo through a higher priority queue and, therefore,experience lower delay, or will be given a lowerdiscard threshold in case of congestion. Similarly,requests for service can be dynamic and extend allthe way to applications, e.g., using the RSVP proto-
w xcol 6 , or may be handled only through static config-uration information that defines bandwidth provi-sioning between specific subnets.
In general, control path trade-offs are along twodimensions: the processing required to support theservice, and the amount of information that needs tobe maintained. For example, the complexity of a calladmission decision to determine if a new request canbe accommodated, depends on both the service defi-nition itself and how it maps onto the underlyingscheduling and buffer management mechanisms.Similarly, a service such as the Guaranteed Servicew x54 involves a number of parameters used to com-pute the end-to-end delay bound and buffer size thatthe service mandates. Examples illustrating some ofthese issues and the associated trade-off are brieflyreviewed in Section 4, that also describes and con-trasts the two services currently being standardizedw x54,60 to provide QoS in IP networks.
In general, which trade-off is desirable or evenfeasible is a function of the scalability requirementsof each environment, i.e., the total amount of infor-

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´ 171
mation and processing that can be accommodated.This is a decision that involves both the data pathand the control path. For example, per flow schedul-ing, buffer management, and state maintenance andprocessing may be appropriate in a local campus, butcan create scalability problems in the core of abackbone where the number of individual flows willbe orders of magnitude larger. In such an environ-ment, scalability is of prime concern and while perflow service mechanisms remain desirable, ap-proaches that rely on service aggregation may beneeded. We review such issues in Section 5, wherewe highlight some of the approaches that have beenproposed so far and point to some of the challengesbeing faced. In particular, we discuss the need forinteroperability between fine grain and coarse grainsolutions, and outline possible solutions.
2. Scheduling mechanisms
The nature of the scheduling mechanism em-ployed on network links greatly impacts the QoSguarantees that can be provided by the network. Thebasic function of the scheduler is to arbitrate be-tween the packets that are ready for transmission onthe link. Based on the algorithm used for schedulingpackets, as well as the traffic characteristics of theflows multiplexed on the link, certain performancemeasures can be computed. These can then be usedby the network to provide end-to-end QoS guaran-tees. First, we describe how the user traffic is charac-terized at the ingress into the network.
2.1. Traffic specification
Both ATM and IP networks are similar in theircharacterization of user traffic. Rather than describeboth we concentrate on IP networks, where thespecification of user traffic is currently done through
w xa TSpec 55 , which consists of the following param-1 Ž .eters : a token bucket plus a peak rate p , a
Ž .minimum policed unit m , and a maximum data-
1 Rates are in units of bytesrs, while packet sizes and bucketdepth are in bytes.
Ž .gram size M . The token bucket has a bucket depth,b, and a bucket rate, r. The token bucket, the peakrate, and the maximum datagram size, together de-fine the conformance test that identifies the userpackets eligible for service guarantees. The confor-mance test defines the maximum amount of trafficthat the user can inject in the network, and for whichit can expect to receive the service guarantees it hascontracted. This maximum amount of traffic is ex-
Ž .pressed in terms of a traffic envelope A t , thatspecifies an upper bound on the amount of trafficgenerated in any time interval of duration t:
A t Fmin Mqpt ,bqrt . 1Ž . Ž . Ž .Ž .Eq. 1 simply states that the user can send up to
b bytes of data at its full peak rate of p, but mustthen lower its rate down to r. The presence of thefactor M in the first term is because of the packetnature of transmissions, where up to one maximumsize packet worth of data can be sent at link speed.The above model is essentially that of a traditional‘‘leaky bucket’’, that lets users specify a long term
Ž .transmission rate r while preserving their ability toŽ .burst at a higher speed p for limited periods of
Ž Ž ..time up to br pyr . The full TSpec furtherincludes a minimum policed unit m, which countsany packet of size less than m as being of size m.This allows for accounting of per packet processingor transmission overhead, e.g., time needed to sched-ule packet transmissions.
2.2. Scheduling policies
We now turn our attention to the differentscheduling policies that can be used to select packetsfor transmission on a link. There are several aspectsthat are to be considered when choosing a schedulingalgorithm. Some of the main ones areØ The nature of the performance measures guaran-
teed by the scheduling algorithm. For instance,does it enable the network to provide a per-flowrate guarantee, or does it provide a simple prioritystructure so that one class of traffic receivespriority over another class?
Ø The efficiency of the algorithm in enforcing ser-vice guarantees. Basically, how many calls withgiven characteristics can be packed on the link.

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´172
This is often measured in terms of call admissionor schedulability region of the algorithm.
Ø The complexity of the algorithm. Given the highlink speeds that are in use today and the evenhigher ones waiting in the wings, the amount oftime available to schedule a single packet iscontinuously decreasing. Therefore, it is very im-portant for the algorithm to require a small num-ber of operations per packet.
Ø The basic mechanism and parameters used by thealgorithm to make scheduling decisions. Of spe-cific interest is whether the algorithm supportsseparate delay and rate guarantees, e.g.,w x w x11,24,62 , or combines the two e.g., 29,46,58 .Separate rate and delay guarantees allow greaterflexibility.
Ø The flexibility of the algorithm in handling trafficin excess of the amount for which the serviceguarantees have been requested. Some algorithmseasily handle excess traffic while others requireadditional mechanisms. The flexibility of an algo-rithm in handling excess traffic is often describedin terms of a fairness index, that attempts tomeasure how equally the algorithm redistribute
Ž w xavailable resources across flows see 3,4,28 for.discussions on this issue .
We try to cover each of these aspects as wereview different scheduling policies.
2.3. First come first serÕed
This is one of the simplest scheduling policieswhose operation is as its name suggests, i.e., packetsare served in the order in which they are received.While this may seem like a fairly poor way ofproviding differentiated service, it is quite simple toimplement. In particular, insertion and deletion fromthe queue of waiting packets is a constant timeoperation and does not require any per-flow state tobe maintained. Not surprisingly, the First Come First
Ž .Served FCFS policy is one of the most commonlyimplemented scheduling policies.
The FCFS policy does not lend itself readily toproviding delay or rate guarantees. One way toprovide a delay bound is to limit the size of thequeue of waiting packets. That way, once a packet isqueued up for transmission it is guaranteed to be sentout in the time it takes to serve a full queue of
packets. However, packets that arrive when the queueis full have to be dropped. To ensure that the dropprobability is below a certain threshold only a lim-ited number of flows should be accepted. A simplemechanism for performing this decision is to com-pute an effectiÕe bandwidth that quantifies theamount of link capacity that is required for each floww x25,31,40 .
Given that the FCFS policy is one of the leastsophisticated in its operation, it does not explicitlyprovide any mechanism for fair sharing of link re-sources. However, with the help of some buffermanagement mechanisms it is possible to control thesharing of bandwidth and we describe some of thesemechanisms in Section 3.
2.4. Fixed priority scheduler
This policy offers some ability to provide differ-ent grades of service with a rather coarse granularity.Traffic is classified as belonging to one of a fixednumber of static priorities. The link multiplexermaintains a separate queue for each priority andserves a packet in a lower priority queue only if allthe higher priority queues are empty. Each queue isserved in a FCFS manner and so this schedulingmechanism is almost as simple as the FCFS policywith the added complexity of having to maintain afew queues. Selecting a packet for transmission is afixed cost operation that only depends on the numberof priority levels and is independent of the numberof flows that are being multiplexed.
While the priority scheduler does offer a certainamount of service differentiation capability, it stilldoes not readily allow end-to-end performance guar-antees to be provided on a per-flow basis. Rather, itonly provides for one class of traffic to receive betterservice than another class of traffic at a single link.As with FCFS, the provision of end-to-end delayguarantees with a fixed priority scheduler canachieved by limiting buffer sizes. However, oneimportant difference, that has to be accounted for, isthe fact that a lower priority packet will be servedonly after all the packets from the higher priorityqueues are transmitted. This is bound to affect thevariability in the delay that is observed by the lowerpriority packets. In general both the FCFS and fixedpriority schedulers are not ideal candidates when it

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´ 173
comes to providing guaranteed end-to-end delaybounds.
Another problem with the priority scheduler isthat different switches may have different levels ofpriority and matching these levels from an end-to-endperspective is no easy feat. In Section 5 we touchupon some aspects of priority levels in the context of
Ž .the Type of Service TOS bit semantics, which arecurrently being discussed at the IETF.
2.5. Fair queueing schedulers
Ž .The Weighted Fair Queueing WFQ service dis-cipline and its many variants have been very popularin the current decade. Part of its popularity stemsfrom the fact that it overcomes some of the limita-tions of the FCFS and priority schedulers by allow-ing for a fine grain control over the service receivedby individual flows. This allows the network toprovide end-to-end delay guarantees on a per-flowbasis. In addition, WFQ serves excess traffic in a fairmanner, where fairness is measured relative to theamount of resources that are reserved for each floww x26 .
Most variants of the WFQ discipline are com-Ž .pared to the Generalized Processor Sharing GPS
scheduler which is a theoretical construct based on aw xform of processor sharing 47 . The operation of a
GPS scheduler can be elegantly defined for a fluidmodel of traffic and tight end-to-end delay boundscan be computed for a flow that traverses multiplelinks which are all served by GPS schedulers. Thebasic idea behind GPS is as follows: a weight f isi
associated with flow i, is1, . . . , N, and the linkcapacity is shared among the active flows in directproportion to their weights. In other words, if g
were to denote the link speed, then flow i is guaran-teed to obtain a minimum service rate ofŽ N .f rÝ f g , is1, . . . , N. However, at any giveni js1 j
time it is quite likely that some flows do not have abacklog of traffic waiting to be transmitted on thelink. This will translate into some unutilized linkcapacity that can be shared among the back-loggedŽ .active flows. The GPS scheduler shares this excesscapacity among the back-logged flows in proportion
Ž .to their respective weights. If B t denotes the set offlows that are back-logged at time tG0, then flow i
is guaranteed to receive a minimum service rate ofŽ .r t given byi
f° ig , igB t ,Ž .
f~ Ý jr t sŽ .i Ž .jgB t¢0, otherwise.
In reality we don’t have fluid flows, so the mainuse of GPS is as a reference model. By simulatingthis reference model it is possible to define servicedisciplines that closely follow the GPS policy. Thisis precisely the way in which the Packetized Gener-
Ž . w xalized Processor Sharing PGPS 47 —also referredŽ . w xto as Weighted Fair Queueing WFQ 14 —is de-
fined. A packet arrival in the real system is modeledas the arrival of a certain volume of fluid in thereference system. A packet is considered to be trans-mitted in the reference system when the fluid volumecorresponding to that packet has been completelyserved by the reference GPS scheduler. The PGPSpolicy simulates the reference GPS scheduler usingthe fluid arrival process as described above andcomputes the departure times of the packets in thereference system. The PGPS scheduler then selectsfor transmission, the packet that would have departedthe earliest in the reference GPS system.
One of the reasons for the popularity of the GPSpolicy is its fair handling of excess traffic. If twoflows are back-logged during any interval of timethey receive service in direct proportion to theirweights regardless of the amount of excess traffic
Ž .that any of them may be generating. Let W t ,ti 1 2
denote the amount of flow i traffic served in theŽ .interval t ,t , is1, . . . , N. The GPS policy ensures1 2
that for any two flows i, j back-logged during theŽ .interval t ,t , the following relation holds:1 2
W t ,t W t ,tŽ . Ž .i 1 2 j 1 2s .
f fi j
Indeed, it is this very relation that is one of themeasures used to quantify fairness among the many
< Ž .approximations of GPS. A bound on W t ,t rf yi 1 2 iŽ . <W t ,t rf for any two flows that are back-loggedj 1 2 j
Ž .in the interval t ,t can be used to compare the1 2w xrelative fairness of different scheduling policies 26 .
The GPS scheduler has a fairness measure of 0.

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´174
Most schedulers that are based on GPS can beimplemented using the notion of a virtual time func-tion. The virtual time is relevant only during a busyperiod which is defined as a maximal interval oftime during which the server is not idle. For GPS the
Ž .virtual time, V t , at the start of a busy period isŽ .defined to be 0. During any busy period V t ad-
vances at the rate of
E V gs .
E t fÝ iŽ .igB t
Based on this virtual time, one can define for eachpacket of a flow, say, the k th packet of flow i, itsvirtual start time, sk, and virtual finish time, f k, thati i
correspond to its start and finish times, respectively,in the GPS reference system. If we further denote itsarrival time by ak, and its length by l k, we then havei i
the following relations:
f 0 s0,i
s k smax V ak , f ky1 , ks1, . . . ,� 4Ž .i i i
l kik kf ss q , ks1, . . .i i
fi
The previously mentioned simulation of GPS onwhich PGPS relies, is based on this notion of virtualtime. It is implemented as follows: the scheduleralways picks the packet with the smallest virtual
Žfinish time for transmission on the link ties can be.arbitrarily broken . This can be efficiently performed
using a priority queue based on the finish times ofthe packets. The complexity of the insertion and
Ž .deletion operations from this queue is O log N .Note however, that there is additional complexity incomputing the advancement of virtual time sinceŽ .B t is not likely to remain the same during the
entire busy period. In the worst case the virtual timeŽ . w xcomputation can be O N as shown in 26 .
Another advantage of the PGPS policy is that anend-to-end delay bound can be computed based onthe weight assigned to the flow. Let g h, hs1, . . . , Hdenote the speed of the links traversed by flow i. Forsimplicity, assume that the traffic envelope for flow i
Ž .is given by A t sb qr t, tG0, and let R be thei i i i
minimum rate guaranteed to flow i by each of thelinks that it traverses. Assuming that the stability
condition, R Gr , holds, the end-to-end delay guar-i i
antee for flow i is given by
H hb Hy1 M LŽ .i i maxD̂ s q q , 2Ž .Ýi hR R gi i hs1
where M denotes the maximum packet length fori
flow i, and Lh denotes the maximum packet lengthmax
at link h. Notice how the b rR term appears onlyi i
once regardless of the number of hops that aretraversed. The reason for this, is that once a bottle-neck link is encountered, the PGPS scheduler effec-tively smooths out the burst in the flow, so that the
Ž .burst delay b rR is no longer encountered down-i i
stream. Also notice how the end-to-end delay boundis independent of the number of other connectionsthat are multiplexed at each of the links traversed byflow i. This property makes the PGPS policy one ofthe best in terms of providing tight end-to-end delayguarantees.
2.6. Variants of fair queueing
One of the main drawbacks of PGPS is the com-plexity involved in computing the virtual time func-tion. Recently, several scheduling policies with sim-pler computations of virtual time have been pro-posed. These policies can guarantee end-to-end delay
Ž .bounds that have a form similar to that of Eq. 2 ,and we briefly highlight some of them next.
Ž .Self Clocked Fair Queueing SCFQ was pro-w xposed in 26 as a simpler alternative to PGPS.
Rather than use the GPS reference model for acomputation of the virtual time, it based the evolu-
Ž .tion of V t on the virtual start time of the packetcurrently in service. This greatly reduced the amountof computation needed to keep track of the virtualtime. This reduction in complexity results in a largerend-to-end delay bound than PGPS. Roughly, it addsa delay term of the form ÝN M rg h at each of theis1 i
w xlinks that are traversed 27 . The fact that the end-to-end delay now depends on the number of flows thatare multiplexed on the link is the main drawback ofthis policy.

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´ 175
Ž .Start-time Fair Queueing SFQ was proposed inw x28 as another Fair Queueing policy. It is verysimilar to SCFQ with the main difference being thatthe SFQ scheduler picks that packet with the small-
Žest virtual start time as opposed to the smallest.virtual finish time for transmission on the link. The
end-to-end delay of SFQ is very close to SCFQ, butis slightly smaller.
While PGPS tracks the GPS policy it only usesthe finish times of the packets in the referencesystem to select the next packet for transmission.Thus packets which have not yet started service inthe reference system may be selected for servicesimply because their finish times are earlier than allthe other packets waiting to be transmitted. This canresult in a significant difference between packet de-partures in the PGPS and the reference system, withpackets departing much earlier in PGPS than in thereference system. This discrepancy can be measured
w xusing the worst-case fairness index as defined in 4 .The Worst-case Fair Weighted Fair QueueingŽ 2 . w xWF Q scheduler proposed in 4 uses both the startand finish times of packets in the reference GPSsystem to achieve a more accurate emulation of GPS.The WF 2 Q policy selects the packet with the small-est virtual finish time in the reference system pro-vided that its virtual start time is less than the currenttime. This prevents it from running too far ahead ofthe reference system. The end-to-end delay boundfor a WF 2 Q scheduler is identical to that of PGPS.
There are a few more scheduling policies that alsoseek to emulate Fair Queueing. The interested reader
w xis referred to 56 for a description of Deficit Roundw xRobin, which extends Weighted Round Robin 39
by taking into account variable sized packets.w xFrame-based Fair Queueing 57 is another schedul-
ing policy that provides the same end-to-end delayguarantees as PGPS but is simpler to implement.
2.7. Earliest deadline first
Ž .The Earliest Deadline First EDF scheduler is aform of a dynamic priority scheduler where thepriorities for each packet are assigned as it arrives.Specifically, a deadline is assigned to each packetwhich is given by the sum of its arrival time and the
delay guarantee associated with the flow that thepacket belongs to. The EDF scheduler selects thepacket with the smallest deadline for transmission onthe link and hence the name. The dynamic nature ofthe priority in the EDF scheduler is evident from thefact that the priority of the packet increases with theamount of time it spends in the system. This ensuresthat packets with loose delay requirements obtainbetter service than they would in a static priorityscheduler, without sacrificing the tight delay guaran-tees that may be provided to other flows. It is wellknown that for any packet arrival process where adeadline can be associated with each packet, theEDF policy is optimal in terms of minimizing the
w xmaximum lateness of packets 22 . Here, lateness isdefined as the difference between the deadline of apacket and the time it is actually transmitted on thelink.
As mentioned earlier, the GPS policy guarantees adelay bound on a per-flow basis based on the weightthat is assigned to the flow. These weights areclosely coupled to a reserved rate, and for a flow toreceive a small end-to-end delay guarantee it isnecessary that it be allocated a relatively large rate.This can lead to an inefficient use of resources,particularly if a low bandwidth flow requires tightend-to-end delay guarantees. One of the main attrac-tions of the EDF policy is that it allows for theseparation of delay and throughput guarantees for aflow.
In terms of implementation the EDF policy ismore complex than the FCFS or the static priorityscheduler. The complexity arises because the sched-uler has to pick the packet with the smallest deadlinefor transmission on the link. This involves keeping apriority list of deadlines and so the insertion or
Ž .deletion from this list has a complexity of O log Koperations, where K corresponds to the number ofpackets awaiting transmission. An obvious optimiza-tion is to only keep a single packet from each of theflows in the priority list of deadlines, since packetsbelonging to the same flow must leave in the orderin which they arrive. As a result, the complexity is
Ž .reduced to O log N , where N is the number offlows multiplexed onto the link. Assuming that eachof these flows are characterized by a traffic envelope
Ž . w xdenoted by A t , is1, . . . , N, it is known 22 thati
the EDF scheduler can provide a delay guarantee of

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´176
D to flow i, is1, . . . , N, provided the followingi
feasibility condition is satisfied:N
A tyD qL Fgt , tG0, 3Ž . Ž .Ý i i maxis1
Ž .where A t :s0 for t-0, and L denotes thei max
maximum transmission unit for the link.
2.7.1. Rate controlled serÕice disciplineThe EDF policy by itself cannot be used to pro-
w xvide efficient end-to-end delay guarantees 24 . ThisŽ .is because Eq. 3 only provides a feasibility check
for the delay guarantees at a single link. To computethe feasibility check at a link that is downstream weneed to know the traffic characterization at that link.The very act of scheduling perturbs the flow and sothe traffic characterization of the flow is not likely toremain the same as it traverses the network. It ispossible to compute a bound on the traffic character-ization of a flow at the link output and use that tocompute a feasible delay guarantee for the flow atthe downstream link. However this approach doesnot result in efficient end-to-end delay guaranteessince the bound on the traffic characterization at the
w xoutput link can be rather pessimistic 24 . Alterna-tively, one could reshape the traffic at each node to apre-specified envelope before it is made eligible forscheduling. Coupled with traffic shapers the EDFpolicy can be used to provide efficient end-to-enddelay guarantees on a per-flow basis. We refer to this
Ž .combination as a Rate-Controlled Service RCS dis-w xcipline 24,62 and briefly discuss some of the impli-
cations of the RCS discipline.The basic idea of the RCS discipline is to reshape
traffic from a flow at every link that it traverses. Theflow need not be reshaped to its original specifica-tion, in fact this turns out to be a particularly bad
w xidea 24 . With the appropriate choice of reshapers itcan be shown that the RCS discipline is the mostefficient in terms of guaranteeing end-to-end delaysof all the scheduling policies that are known today.
w xIn 24 , it is shown that with an appropriate choice ofshaper envelopes the RCS discipline can provide thesame delay guarantees as PGPS and in additionaccept some more flows. As mentioned at the begin-ning of this section, the efficiency of schedulingalgorithms can be measured in terms of the numberof flows they can support with given delay guaran-
tees. This corresponds to the notion of a schedulablew xregion, and it can be shown 24 that the RCS
discipline has the largest schedulable region amongall scheduling policies known today. An exampleillustrating the schedulable region of different
w xscheduling policies can be found in 48 .
2.8. Hierarchical link sharing
As discussed in Section 4, a network may offerseveral different services over a single link. The linkwill, therefore, have to be partitioned to support thedifferent service classes. Alternatively, a single linkin the network may be shared by several differentorganizations or departments within an organization.Each of these may want to receive a guaranteedportion of the link capacity but are willing to allowother departments or organizations to borrow unuti-lized link resources. The hierarchical structure oforganizations suggests a hierarchical partitioning ofthe link resources. A hierarchical link sharing struc-ture consisting of classes that correspond to some
w xaggregation of traffic is suggested in 19 and isŽ .often referred to as Class Based Queueing CBQ .
Each class is associated with a link-sharing band-width and one of the goals of CBQ is to roughlyguarantee this bandwidth to the traffic belonging tothe class. Excess bandwidth should be shared in afair manner among the other classes. There is norequirement to use the same scheduling policy at alllevels of a link sharing hierarchy, and it is conceiv-able that classes carrying interactive traffic may ben-efit from a simple priority scheduling policy as
Ž w xopposed to rate-based schedulers see 19 for de-.tails .
This being said, the GPS policy can be used in ahierarchical manner to provide both link sharing andindividual QoS guarantees to flows. At the top-levelof the hierarchy, the weights reflect the link sharingrequirements, while the lower level weights are usedto provide individual QoS guarantees. Whenever aninterior node receives service it is distributed amongits child nodes in direct proportion to their weights.Note that there may be more than two levels in thehierarchy. Except for leaf nodes, other nodes onlyreceive a logical service. The interested reader is
w xreferred to 3 for a detailed description of hierarchi-cal packet fair queueing algorithms.

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´ 177
3. Buffer management
While the scheduling policy does play a big rolein the QoS provided by the network, it is onlyeffective if there are sufficient buffers to hold incom-ing packets. Since link speeds are currently in theorder of Gigabits per second, the amount of memoryrequired to buffer traffic during transient periods ofcongestion can be large and exceed the amount ofmemory that most routers and switches have. Packetsthat arrive during these transient periods will have tobe dropped. If the end-to-end transport protocol is areliable one like TCP, then a lost packet causes aretransmission as well as a reduction in the size ofthe congestion window. The net result will be alower end-to-end QoS for the flow concerned.
In order to avoid a haphazard behavior when alink experiences congestion, several different buffermanagement schemes have been proposed. Thesecan be roughly classified along the following twodimensions:1. When are packet discard decisions made? Typi-
cally, packet discard decisions are made eitherupon the arrival of a new packet, or at the onsetof congestion where currently stored packets maythen be discarded to accommodate a new, higherpriority packet.
2. What information is used to make packet discarddecisions? The main aspect is the granularity ofthe information, i.e., is per flow buffer accountingdone and used to discard packets from individualflows, or is only global, per class, informationkept and used.
Different designs correspond to different trade-offsbetween performance and complexity along thesetwo dimensions, where the performance of a buffermanagement scheme is measured in terms of itsability to control traffic fairly and efficiently duringperiods of congestion. Efficient treatment means thatthe buffer management mechanism should avoid vio-lation of a service agreement by losing many ‘‘high
Ž .priority’’ conformant packets during periods ofcongestion. For example, this can happen if toomany low priority packets are allowed in, and as aresult some packets from an arriving high priorityburst are lost. One solution is to allow the high
w xpriority packets to ‘‘push-out’’ 42 the low priorityones, but this capability adds to the implementation
complexity of the scheme. In addition, it may notŽ w xalways be sufficient see 7 for a discussion of this
.issue and additional mechanisms may be needed totry to avoid congestion. In this section, we describe afew such buffer management mechanisms like Early
Ž . w xPacket Discard EPD 51,59 and Random EarlyŽ . w xDiscard RED 18 , where, as a preventive measure,
packets are discarded before the onset of congestion.Detecting the onset of congestion and the associ-
ated preventive measures vary with the link technol-ogy being used. For example, on ATM links an IPpacket may be segmented into smaller units, e.g. 53byte cells. In this case, congestion is measured withrespect to the buffer’s ability to store cells. A singlecell loss will result in an entire packet being ren-dered useless, so that it is advantageous to discard anentire packet’s worth of cells at a time. One obviousapproach is to drop all subsequent cells from apacket if there is no room in the buffer for anarriving cell. This is termed Packet Tail Discarding
w x Ž . w xin 59 or Partial Packet Discard PPD in 51 . Whilesuch a technique helps avoid unnecessary bufferwaste, substantial packet throughput degradation stilloccurs during periods of very high congestion, e.g.,offered traffic above twice the link capacity. This isbecause in such cases, almost every packet will loseat least one cell, and flows with large packets will beeven further penalized.
A possible approach to remedy this last problem,is to predict the onset of congestion and discard allcells of packets that are expected to experience a cellloss. For example, this can be achieved using asimple threshold on the buffer occupancy to decidewhether to accept or drop a packet at the time itsfirst cell is received. This is referred to as Early
Ž . w xPacket Discard EPD 51 and has the benefit thatlink capacity is not wasted in the transmission ofpartial packets. EPD performs better than PPD andresults in an effective throughput of close to the link
w xcapacity with relatively fewer buffers 51,59 .However, it turns out that EPD can be unfair to
low bandwidth flows. In particular, if the bufferoccupancy is hovering around the threshold value,then high rate flows are likely to have more opportu-
Žnities at getting their packet accepted assuming.identical packet sizes . Once a packet is accepted it
pushes the buffer occupancy above the threshold anda subsequent packet from a low bandwidth flow is

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´178
then likely to be dropped. Some of these issues arew xdiscussed in 59 , which presents a number of en-
hancements to the basic EPD scheme aimed at im-proving not only goodput, i.e., the number of com-plete packets transmitted, but also fairness in select-ing flows that can start buffering a new packet.
In general, it is desirable to devise buffer manage-ment schemes, that preserve the goodput benefits ofEPD while also ensuring fairness in how this good-put is distributed across flows. The fairness of abuffer management scheme is a function of how itpenalizes packets from non-conformant flows, i.e.,flows sending at a higher rate than they are entitledto. Ideally, the scheme should ensure that no singleflow can grab a disproportionate amount of thebuffer space, thereby affecting the performance levelof other flows. If per flow buffer accounting isperformed, it is relatively easy to identify misbehav-ing flows and take appropriate actions to ensure afair allocation of the buffer space. However, there isa cost associated with per flow buffer accounting,and in some environments where scalability is aconcern, buffer management may need to be done ata coarser level. The penalty is that it is harder toensure fairness when many flows share a commonbuffer. In some instances, i.e., with adaptive applica-tions such as TCP, it is, however, possible to ensuresome level of per flow fairness without maintainingper flow state. This was one of the goals of the
Ž . w xRandom Early Drop RED 18 mechanism, whichrelies on random dropping decisions when the buffercontent exceeds a given threshold, so that heavyflows experience a larger number of dropped packetsin case of congestion. Hence RED aims at penalizingflows in proportion to the amount of traffic theycontribute, and therefore preventing any of themfrom grabbing a disproportionate amount of re-sources.
Specifically, assuming that flows use TCP as theirtransport protocol, RED provides a feedback mecha-nism so that sources can be notified of congestion inthe router and accordingly reduce the amount oftraffic that they inject into the network. First theaverage queue size is computed using a low-passfilter with an exponentially weighted moving aver-age, so that the router does not react too quickly totransient phenomena. Next, this queue size is com-pared to a maximum and minimum threshold, often
denoted by max and min . If the average queueth th
size is below min or above max , all packets areth th
accepted or dropped respectively 2. When the aver-age queue size is between max and min , anth th
arriving packet is dropped with a probability thatdepends on the average queue size.
The probability that a packet from a particularflow is dropped is roughly proportional to the flow’sshare of the link bandwidth. Thus a flow that isutilizing a larger share of the link bandwidth isforced to reduce its rate rather quickly. One of themain advantages of RED is that it does not requireper flow state to be maintained in the router. As aresult, RED is relatively simple to implement andcan be used in conjunction with the simple FCFSscheduler described in Section 2 to reduce conges-tion in the network. This can be of significance inthe Internet backbone, where there may be hundredsof thousands of flows on a given link.
While RED does not discriminate against particu-lar types of flows, it should be noted that it does notalways ensure all flows a fair share of bandwidth. Infact, it turns out that RED is unfair to low speed TCPflows. This is because RED randomly drops packetswhen the maximum threshold is crossed and it ispossible that one of these packets belongs to a flowthat is currently using less than its fair share ofbandwidth. Since TCP reacts rather strongly to packetloss, the lost packet will force further reduction inthe congestion window resulting in an even lower
Ž .rate. The Fair Random Early Drop FRED mecha-w xnism is presented in 44 as a modification to RED in
order to reduce some of its unfairness. In addition tothe RED thresholds, FRED maintains thresholds forindividual flows as well as the current buffer occu-pancies for each of the active flows. This is used todecide which flows are using a larger amount ofbandwidth than they are entitled to, so that a selec-tive discard mechanism can be effected. This per-flowstate also allows FRED to detect misbehaving flows,and it can use this information to prevent them fromconsistently monopolizing the buffers.
2 Packets can be alternatively marked, instead of droppingthem, if packet marking is supported by the network and theend-stations

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´ 179
In some environments, notably ATM, it is quitenatural to maintain state information for each flow orvirtual circuit. Also, the fixed cell size for ATMfacilitates hardware implementation of complexscheduling and buffer management algorithms. ForATM, there are many single chip solutions thatperform per-flow scheduling and buffer manage-
w xment, e.g., IBM’s CHARM chip 13 . Here eachvirtual circuit can be guaranteed to receive a certainrate regardless of the other flows that are multi-plexed on the link. However, as mentioned earlier,this rate guarantee is good only if there is sufficientmemory to buffer incoming cells. One might arguefor the buffers to be strictly partitioned among eachof the virtual circuits but this is not necessarily a
w xgood strategy. In 38 it is shown that a completepartitioning of the buffers results in a higher packetloss probability than when the buffers are sharedamong all the flows. Of course, complete sharingcomes with its own problems, particularly when adiverse set of flows are to be multiplexed on the link.A good compromise is to guarantee a few buffers toeach individual flow, while retaining a certain frac-tion of the total buffer space for sharing across the
w xdifferent flows 38 . As a matter of fact, the relation-ship between buffer allocation and rate guarantee can
w xbe made precise. In 33 , it is shown that even withan FCFS scheduler, rate guarantees can be providedby appropriately allocating buffers to flows. In par-
w xticular 33 , establishes the intuitive result that rateguarantees are in proportion to buffer allocation.
Overall, the buffer management schemes cur-rently being deployed should ensure that serviceguarantees of applications are met, i.e., packets thatconform to a service contract will rarely be dropped.However, substantial differences may exist in howexcess traffic is being supported. In particular, net-works that do not differentiate between adaptive andnon-adaptive applications and do not support perflow buffer accounting, are likely to provide only
Ž .relatively poor unfair performance to excess traffic.
4. Service definitions and associated requirements
In this section, we review the two services thathave been standardized by the IETF Integrated Ser-
Ž .vice Working Group, the Controlled Load CL ser-
w x Ž . w xvice 60 and the Guaranteed Service GS 54 . Wealso discuss briefly a recent IETF effort to introduceless rigorous service specifications than those of CLand GS, to facilitate support for service aggregation.We expand further on this last issue in Section 5.
4.1. Controlled load serÕice
The definition of the Controlled Load service isqualitative in nature. It aims at approximating theservice a user would experience from an unloadednetwork, where unloaded is not meant to indicate theabsence of any other traffic, but instead the avoid-ance of conditions of heavy load or congestion. Ofsignificance is the fact that while the ControlledLoad service specification is qualitative in nature, itdoes require a quantitative user traffic specificationin the form of the TSpec of Section 2.1. This is ofimportance as this represents a key input to the calladmission process, that is required to limit the num-ber of flows the network is willing to accept and,therefore, ensure the desired ‘‘unloaded’’ networkbehavior.
The guarantees that the Controlled Load serviceprovides are essentially a guaranteed sustained trans-mission rate equal to the token bucket rate r, and the
Žpossibility to send occasional bursts of size limited.by the token bucket depth b at its peak rate p.
There are no explicit delay or even loss guaranteesassociated with the service, and this allows for someflexibility in the call admission process and theassociated scheduling and buffer management mech-anisms.
For example, Controlled Load flows on a givennetwork link can be supported through a basic FCFSscheduler whose load is controlled using an effectivebandwidth based call admission control, e.g.,w x25,31,40 , together with a simple threshold basedbuffer management scheme. The benefits of such anapproach are its simplicity in terms of both data pathand control path. Neither the scheduling nor thebuffer management require awareness of individualflows, and the call admission process only involvesadditions and subtractions as flows come and go.Further efficiency in the call admission control canbe achieved, at the cost of some added complexity,by using better models for computing the effectivebandwidth of a flow based on its TSpec as suggested

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´180
w xin 34,35 , or by using measurement based call ad-w xmission control techniques as described in 30,37 .
It should be noted that the approach just outlinedassumes that excess traffic from individual flows canbe readily identified, e.g., using explicit marking as
w xsuggested in 9 . If it is not possible to explicitlymark and, therefore, easily identify excess trafficfrom individual flows, more complex data pathmechanisms may be required to properly support theControlled Load service. This is required to ensurethat excess traffic from one flow does not impact theservice guarantees of other flows. One possible alter-native is to rely on per flow buffer accountingmechanisms as described in Section 3. The tightercontrol of the amount of buffer space each flow canoccupy provides the necessary protection against ex-cess traffic, but comes at the cost of maintaining perflow buffer state.
A further refinement to per flow buffer state is toreplace the FCFS scheduler by one of the schedulersof Section 2, that is capable of providing rate guaran-tees to individual flows. This can be a Weighted Fair
Ž . w xQueueing WFQ scheduler 14,45–47 , or even aŽ .Self Clocked Fair Queueing scheduler SCFQ
w x26,27 since strict delay guarantees are not criticalfor Controlled Load flows. This increases the amountof per flow state by adding transmission state tobuffer state, but offers a number of additional bene-fits.
It improves the accuracy of the buffer manage-ment mechanism by ensuring that packets from eachflow get regularly transmitted, so that any increase ina flow’s buffer occupancy can be readily associatedwith a traffic increase for the flow. In contrast, aFCFS scheduler provides a much less regular serviceto individual flows, e.g., a flow whose packets are allat the back of the queue must wait until all packetsahead of them have been sent. As a result, it is moredifficult to determine if variations in the buffer occu-pancy of a flow are caused by an increase in trafficor are due to service fluctuations.
In general, the relatively loose definition of theguarantees provided by the Controlled Load serviceallows a relatively wide range of implementationtrade-offs. In particular, most of the mechanismsdescribed in Sections 2 and 3 can be used to build asystem that abides by the Controlled Load specifica-
w xtions 60 . As we shall see in the next section, this is
less so for the Guaranteed Service because of itsstricter service definition.
4.2. Guaranteed serÕice
The Guaranteed Service shares with the Con-trolled Load service the use of a TSpec to specify theuser traffic to which the service guarantees apply,but this is where any resemblance stops. While theControlled Load service offers qualitative serviceguarantees, the Guaranteed Service gives not only
Ž .quantitative but also hard deterministic serviceguarantees. Those guarantees include, for confor-mant packets, lossless 3 transmission and an upperbound on their end-to-end delay. The goal of theservice is to emulate, over a packet-switched net-work, the guarantees provided by a dedicated ratecircuit. Clearly, such guarantees are not warrantedfor all applications because of their cost, but they areimportant for applications with hard real-time re-quirements, e.g., remote process control, tele-medi-
w xcine, haptic rendering in distributed CAVEs 20 , etc.Requesting the Guaranteed Service is carried out
Ž .using a one pass with advertisement OPWA ap-w xproach as supported by the RSVP 6 protocol. The
process starts with the sender specifying its traffic inthe form of a TSpec, which is then sent in anassociated signalling message, e.g., using an RSVP
Ž .PATH message, towards the intended receiver s . AsŽ .the message propagates towards the receiver s , it is
updated by each node on the path so that the charac-w xteristics of the path are recorded 55 and, therefore,
available to the receiver once the message reaches it.Characteristics of particular interest to the Guaran-teed Service are captured in an ADSPEC, that isused to record the delay ‘‘contribution’’ of thescheduler used at each node. This contribution is inthe form of two ‘‘error terms,’’ C and D, thataccount for different aspects of a scheduler’s behav-ior and whose impact is additiÕe along the path ofthe flow. In other words, the cumulative impact ofthe schedulers of all the nodes on path PP is itselfrepresented by two error terms C and D of thet o t t o t
form:
C s C , D s D .Ý Ýt o t i t o t iigPP igPP
3 Except for losses due to line errors.

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´ 181
The Guaranteed Service is built around the modelw xof rate-based schedulers as first investigated in 47
and discussed in Section 2. Rate based schedulersattempt to approximate a perfect fluid server, thatguarantees delay by ensuring the user a minimalservice rate at any time, i.e., the GPS model ofSection 2.5. Under such a model, a scheduler can berepresented by how it deviates from the behavior ofthis perfect fluid server. The error terms C and D ofthe Guaranteed Service are used to capture those
Ž w x .deviations see 47,54 for details .The behavior of a Guaranteed Services scheduler
can be accurately described using the notion ofw xserÕice curÕes 11,12 . Analogous to the way a traf-
fic envelope bounds the amount of input traffic, aservice curve can be used to provide a lower boundon the amount of service received by a flow at an
Ž w xindividual network element see 12,43,53 for defi-.nitions of service curves . The Guaranteed Services
scheduler can be represented as having a servicew xcurve of the rate-latency form 43 , with a latency of
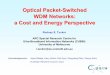
CrRqD, for all values of the rate R. The end-to-endservice curve for a given flow is computed using aconvolution of the service curves at each of thenetwork elements traversed by the flow. An advan-tage of the service curve methodology is that itenables a simple graphical representation of theworst-case delay and buffer requirements. For exam-ple, as shown in Fig. 1, the worst-case delay andbuffer requirements for a flow at network element iare computed as the horizontal and vertical distance
Ž .Fig. 1. Delay and buffer calculations for an b,r, p, M flow.
from the traffic envelope and the service curve,respectively.
Specifically, a user with a TSpec of the formŽ .b,r, p, M , and which has been allocated a ‘‘servicerate’’ of R at each of a set of schedulers character-ized by cumulative error terms C and D , ist o t t o t
ˆguaranteed an upper bound D on its end-to-endw xqueueing delay of the form 23,54 :
° byM pyRŽ . Ž .if p)R ,
R pyrŽ .M Ctot~D̂s 4q q qD Ž .t o tR R
M Ctotq qD if pFR .t o t¢R R
A similar expression is available to determine thenecessary buffer space at a given node, so as to
w xavoid any packet loss 23,54 .Ž .In the context of the Guaranteed Service, Eq. 4
is used by the receiver to determine which servicerate R to request in order to obtain the desiredend-to-end delay bound, given the TSpec specifiedby the user and the C and D values associatedt o t t o t
with the schedulers on the path. This request for aservice rate R is then sent back towards the sender,e.g., using an RSVP RESV message, and processedat each node which determines if it has enoughcapacity to accept the request, i.e., performs calladmission. Call admission varies with the type ofscheduler used, and this is one of the areas wheredifferent trade-offs between efficiency and complex-ity are possible. Before proceeding further with thisissue, we briefly review a number of interestingproperties of the Guaranteed Service.
First, while the use of a rate-based model intro-Žduces some limitations in terms of efficiency see
w x .24 for an example , it also affords significant sim-plicity. In particular, the use of a single service rateto be guaranteed at each scheduler on the path,avoids altogether the complex problem of trying todetermine and assign individual resource require-ments at each scheduler. Such a ‘‘one size fits all’’approach precludes a lightly loaded scheduler fromcompensating for a more heavily loaded one, e.g., asis feasible with a delay based scheduler such as EDF,where a large deadline at one node can be compen-

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´182
sated by a small one at another node. However,exploiting such potential is a challenging problem 4.
Second, the rate-based model does not precludethe use of other types of schedulers. For example, adelay based scheduler such as EDF can be usedinstead, albeit with some constraints on how the
Ž w xdeadlines are to be chosen at each node see 23 for.details .
Third, as mentioned earlier, there is a cost associ-ated with the deterministic guarantees that the Guar-anteed Service provide. For example, as is shown inw x23 an average load of only 40% is not uncommonon a link carrying Guaranteed Service flows. Theremaining bandwidth will most certainly not be leftunused, i.e., it will be assigned to lower prioritytraffic, but this indicates that the network is likely tocharge a premium for Guaranteed Service. The hardguarantees it provides may be important to certainapplications, but the cost may not be justified for all.
4.2.1. Trade-offs in implementing guaranteed serÕiceWe now briefly discuss some of the trade-offs
that are available when implementing the GuaranteedService. As for the Controlled Load service, trade-offs involve both the data path and the control path.
Data path trade-offs are primarily in terms ofscheduler efficiency versus implementation complex-ity, where efficiency is measured through the sched-
w x Žuler’s schedulable region 22,24 the larger, the.better , and complexity is a function of the opera-
tions performed when scheduling the transmission ofa packet. For example, as was discussed in Section
Ž .2, the tighter scheduling smaller error terms pro-vided by the WFQ scheduler when compared to, say,the SCFQ scheduler, comes at the cost of morecomplex computations when scheduling a packet.This affects the implementation cost and speed of thescheduler.
However, it should be noted that the tighter thescheduling, the lower the buffer cost. This is illus-trated in Fig. 1, which shows the cumulative worst-case delay and buffer requirements at node i. Tight-ening the scheduling at node i amounts to reducingthe error terms C and D , which in turn shifts to thei i
4 The optimal assignment of local deadlines for a given end-to-end delay bound is known to be intractable.
left the service curve at node i. This shift helpsreduce not only the delay, but also the bufferingneeded at node i. Furthermore, this reduction inbuffering also applies to downstream nodes, at least
Ž w xuntil the next reshaping point see 23 for a discus-.sion on the benefits of reshaping . As a result, the
choice of a particular scheduler needs to take intoconsideration not only the cost of the scheduleritself, but also the cost of other system wide re-sources such as link bandwidth and buffer space.
These trade-offs need to be further combined withcontrol path issues, which can also contribute signifi-cant differences in terms of complexity and effi-ciency. In order to better illustrate the issues, wefocus the discussion on the differences betweenrate-based, e.g., WFQ, and delay-based, e.g., EDF,schedulers. Delay-based schedulers have been shown,
w xe.g., 22,24 , to yield larger schedulable regions thanrate-based ones and to, therefore, afford more effi-cient use of link bandwidth when it comes to provid-ing hard delay guarantees. However, this comes atthe cost of a more complex call admission process.
In the case of a rate-based scheduler such asWFQ, the call admission decision amounts to deter-mining if the requested service rate R is available.This is easily accomplished by keeping track of thesum of the service rate requests that have beengranted, and ensuring that this sum remains smallerthan the link speed after the new request is added. Inother words, call admission amounts to a simpleaddition and comparison.
The case of a delay-based scheduler such as EDFis more involved. First, in the context of the Guaran-teed Service, the requested service rate R needs tobe translated into a local deadline which the EDFscheduler can use. As mentioned earlier, this firsttask is easily performed, e.g., using the approach ofw x23 , so that the bulk of the complexity lies indetermining if the new request with its associateddeadline and TSpec can be accepted. The exact
Ž . Ž w x.procedure is as given in Eq. 3 see also 23 , but ismore easily described using an example.
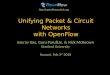
Fig. 2 provides a graphical representation of thecall admission procedure used with an EDF sched-uler. It essentially amounts to ensuring that the
Ž‘‘sum’’ of the shifted traffic envelopes as specifiedŽ ..by Eq. 1 of all the flows remains at least one
maximum size packet below the line corresponding

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´ 183
Fig. 2. Call admission rule for EDF scheduler.
to the maximum number of bits that can be transmit-ted at the link rate. The shift applied to each trafficenvelope is equal to its local deadline at the EDFscheduler. Fig. 2 shows the case where two flowsŽ .flow 1 and flow 2 are already in, and a third oneŽ .flow 3 is being added. The complexity of theprocedure is that it requires both storing the currentsum of all shifted traffic envelopes, e.g., by keepingthe associated inflexion points, and checking thatadding a new shifted envelope does not cause anypoint of the new curve to cross the link capacity lineŽthis can again be done by checking only at inflexion
. w xpoints . There have been some proposals, e.g., 17 ,with simplified procedures, but the call admissionprocedure does remain more complex than the sim-ple addition of rate-based schedulers. As a result, itis again important to consider this cost in the contextof an overall system design.
4.3. Differentiated serÕice
In this section, we briefly discuss some recentefforts started in the IETF to introduce ‘‘looser’’service specifications than those that have been dis-cussed in the two previous Sections. It is actuallyinteresting to note that this represents somewhat of abackwards evolution. Specifically, some of the ear-lier works in the area of QoS support had focused onsimple rules for call admission, coupled with aggre-gate priority-based structures for service differentia-
Ž w xtion see, for example 1,35 , for the description of a.general framework based on those premises . The
main reason was that the data path technology was atthe time not considered capable of finer granularity
Ž .per flow control. However, these initial works werequickly followed by many proposals aimed atstrengthening service guarantees through the use ofmore sophisticated scheduling and buffer manage-ment algorithms as described in Sections 2 and 3.This evolution was fueled in part by the availabilityof new components 5 capable of such advanced func-tions, but also by the desire to better control the
Ž w xservice experienced by individual flows see 8 foran example of potential discrepancies between global
.and per flow service guarantees .Those activities and efforts not withstanding, there
has been a renewed interest and focus on ‘‘simple’’QoS guarantees, and in some instances guaranteesthat are even more qualitatiÕe than the ControlledLoad service specification. For example, many of therecent IETF discussions on these issues 6 have fo-cused on defining services that map to differentlevels of ‘‘sensitiÕities’’ to delay and loss, i.e.,without being associated to explicit values or guaran-tees. There are many reasons that have been men-tioned to motivate a return to those simple solutions.
One of them is clearly the difficulty of upgradingan infrastructure of the size of today’s Internet. Thesheer size of the Internet means that it is likely thatthe path of any flow will, at least for some time,cross portions of the network which are either notQoS capable, or only support crude service differen-tiation capabilities. This weakens the case for strongper flow end-to-end guarantees. Similarly, supportfor the signalling capabilities, e.g., RSVP, requiredto let users and the network negotiate precise servicedefinitions may also not be widely deployed initially.
There are, however, more fundamental argumentsthat have been put forward. The more prevalent oneis that there is no real need for strong and explicitQoS guarantees. Instead, proper network engineeringand broad traffic classification, e.g., into a smallnumber of ‘‘priority’’ classes, coupled with theadaptive nature of many applications, should be suf-ficient to offer the necessary functionality. The basic
5 w xFor example, the CHARM chip 13 can reshape and scheduleup to 64,000 individual flows at speeds up to OC-12, and there aretoday many instances of components with similar capabilities.
6 Those discussions are currently been carried in the Diff-Servworking group and its mailing list at [email protected].

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´184
premises and reasoning behind this argument are thatonly a small fraction of applications have the needfor strong guarantees. As a result, adequate provi-sioning for their peak traffic load, together with
Ž .protection through coarse classification from lowerpriority traffic, will provide them the desired level ofservice. Adequate provisioning will also ensure thatthe rest of the traffic experiences, most of the time,adequate service, possibly with again some coarsedifferentiation. In case of congestion, flows willadapt their traffic to the available resources, andcontinue operating albeit at a lower level of service.The benefits are higher oÕerall efficiency, i.e., moreflows getting through, and greater simplicity, i.e.,minimal signalling support and simple data pathmechanisms.
The analogy most often used to illustrate thismodel, is a comparison between IP telephony and thecircuit-switched telephone system. In cases of unusu-ally high congestion, a circuit-switched system willblock new calls and may even operate at a lowerlevel of throughput because of resources held bycalls that are being blocked. In contrast, upon detect-ing congestion, IP telephones may be able to adjusttheir coding rate and even be able to still operatewith higher packet losses and delays. Assuming thatthis is achieved without preventing emergency callsfrom getting through, e.g., by assigning them to ahigher priority class, the claim is that this will allowmore calls to get through.
There are obviously many assumptions behind theabove model, e.g., level of over-provisioning needed,range of adaptation, etc., and it is not the intent ofthis paper to provide a comprehensive investigationof these issues. This would in itself be the topic of anentire paper. However, there are several other lesscontroversial perspectives for why a coarser QoSmay be of value. In particular, the same level of QoScontrol may not be required in all environments. Forexample, it may be warranted to provide tight perflow delay control in an access switch or router, butsuch fine control may be an overkill in a backbone
Ž .switch running at OC-48 2.4 Gbps speed or higher.Similarly, maintaining awareness of individual 16kbps flows on an OC-48 link translates into a verysubstantial and potentially costly amount of state
Žinformation there could be up to 150,000 such.flows , as well as a significant signalling load. As a
result, it may be worth considering different QoSmodels in different environments. In particular, thepotential for aggregation offered by a ‘‘differentiatedservice’’ model can be of benefit in the backbone ofthe Internet, while the finer grain ‘‘integrated ser-vice’’ and RSVP model may be more appropriate foraccess and campus networks. The main challenge isthen to ensure inter-operability between these twoenvironments. In the next section, we explore someof these issues and possible approaches to inter-oper-ability.
5. End-to-end QoS: aggregation issues and models
As was mentioned in the previous section, scala-bility requirements are likely to introduce the needfor aggregation. This is especially applicable to thecore of the backbone where the potentially largenumber of flows and the high speeds of the links,can stress cost and complexity. This need for aggre-gation is by no means a prerogative of IP networks.For example, the hierarchical structure of the VPI
w xand VCI fields in the header of ATM cells 52 , wasprimarily intended to support both data path andcontrol path aggregation. Specifically, forwardingand service differentiation decisions can be made by
Ž .looking only at the shorter 8 to 12 bits VPI fieldinstead of the full 28 header bits, and similarly setupand take down of individual VCs within a VP doesnot require processing of individual signalling mes-sages.
In the case of an Int-ServrRSVP IP network, thegranularity of QoS requests is currently determinedthrough filters that specify destination address andport number, as well as source address and port
Ž w x .number in some instances see 6 for details . Thiscorresponds to a very fine granularity of QoS guar-antees, and while this provides end-users with accu-rate control, it has been identified as a potentialproblem for scalability. As a result, the goal ofaggregation is to allow such individual end-to-endQoS guarantees, but without requiring awareness ofindividual flows on each and every segment of theirpath. This goal translates into a number of specificrequirements that must be satisfied by any aggrega-tion technique. Those requirements are best under-stood through an example.

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´ 185
Consider a network topology consisting of threeŽ .separate Autonomous Systems AS , with the two
edge AS, say, AS1 and AS3, corresponding to localŽ .AS and the middle one AS2 representing a back-
bone interconnecting the two. For the purpose of ourdiscussion, scalability is of concern only in the back-bone AS2, i.e., AS1 and AS3 are capable of main-taining individual flow state information. Aggrega-tion of individual flows in AS2 should then satisfythe following requirements:R1. AS2 should not have to maintain awareness of
individual flows between AS1 and AS3. In-stead, AS2 should be able to map individualflows onto few internal service ‘‘classes’’.
R2. Isolation between flows should be maintained inAS2, i.e., even when flows are aggregated into acommon service class, the excess traffic of oneflow should not affect the performance guaran-tees of another flow.
R3. AS2 should ensure that it satisfies the QoSrequirements of individual flows, e.g., the re-sources allocated to a service class in AS2should be consistent with the aggregate re-sources required by all the individual flowsmapped onto it.
R4. Aggregation in AS2 should not prevent supportfor individual flow reservations in AS1 andAS3.
Requirement R1 is the core scalability require-ment expressed by AS2. Requirements R2 and R3specify properties, that have to be satisfied by themapping of individual RSVP flows onto the coarser‘‘classes’’ of AS2. Requirement R2 states that theQoS guarantees provided to an individual flow mustremain limited to its conformant packets to avoidaffecting the service guarantees of other flows. Thisin turn implies the need for some means to identifynon-conformant packet even after flows have beenmerged, e.g., packet marking as mentioned in Sec-tion 4.1. Requirement R3 expresses the need for
Žsome coupling between the resources bandwidth. Ž .and buffer and level of service priority assigned to
a class in AS2, and the aggregation of the individualflows mapped onto that class. Requirement R4 ex-presses the important constraint that satisfying scala-bility in AS2, should not come at the expense offunctionality in AS1 and AS3. In other words, theaggregation of control and data path information in
AS2 should be reversible, so that reservations in AS1and AS3 can default back to individual flows aftercrossing AS2.
The last two requirement, R3 and R4, are primar-ily control path issues and represents the main inter-operability challenge that QoS aggregation faces. Asa result, we focus the discussion in the rest of thissection on this specific issue, and assume, as sug-
w xgested in 9,10,15,16,36,41 , that data path aggrega-tion is achieved through the use of specific bitpatterns in the IP header, e.g., the type-of-serviceŽ . w xTOS octet field 49 is used to specify differentservice classes and drop precedence 7.
5.1. End-to-end control path interoperability
In the context of aggregation, a key aspect ofservice guarantees is that the resources allocated to aset of aggregated flows should reflect the ‘‘sum’’ ofthe reservation requests conveyed in individual reser-vation messages. There are two generic solutions thatcan be used to satisfy such a requirement, and theycan be broadly categorized as static and dynamic.Static solutions rely on provisioning and support ofdifferent classes of service on backbone links, so that‘‘soft’’ guarantees can be provided between giveningress and egress points. Dynamic solutions involve
Ž .the ability to adjust the level of aggregate reserva-tion of each service class on individual backbonelinks as a function of the actual offered traffic. Thisallows for ‘‘harder’’ service guarantees.
Static solutions are obviously simpler and alsoeasily satisfy requirement R4 as dynamic reservationrequests, e.g., RSVP PATH and RESV messages, arenot processed in the backbone. As a result, suchindividual setup messages can be directly propagatedthrough the backbone, and require minimal addi-tional processing at the ingress and egress points. Forexample, update of ADSPEC fields in PATH mes-sages can be done using pre-configured informationfor each ingress. However, static solutions also havelimitations in how they handle changes in the back-bone. In particular, route changes in the backbone
7 Note that another possible approach is to rely on tunnelsŽ .layer 2 or layer 3 , but we do not discuss this alternative here,
w xand refer the reader to 32 for more details.

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´186
affect the accuracy of provisioning on backbonelinks, as well as the ability to properly update theADSPEC field to characterize the path actually takenthrough the backbone.
As a result, even if static solutions are likely to bethe first ones deployed, it is desirable to providesolutions that allow a more accurate control of ser-vice guarantees while still enjoying the benefits ofaggregation. Satisfying this goal has several require-ments and implications in the context of Int-ServrRSVP services:1. Disable processing of individual RSVP messages
in the backbone, while still allowing their identifi-cation when they arrive at egress or ingressrouters.
2. Identify transparently, i.e., without relying oncontinuous interactions with routing, the egressrouters corresponding to individual flows enteringthe backbone at an ingress router.
3. Properly update the ADSPEC of RSVP PATHmessages of individual flows at egress routers.
4. Reserve the appropriate amount of resources onbackbone links to satisfy the QoS requirements ofindividual flows routed over them.The first two items are protocol specific, and can
be handled either by using a separate signallingprotocol for setting up aggregate reservation, e.g.,
w xsee 2,5 , or by reusing the RSVP protocol itself,w xe.g., 32 . In either cases, individual RSVP reserva-
Ž .tions are not processed hidden inside the backbone,Ž .where separate aggregate messages are used to
reserve resources based on the requirements of theindividual flows being aggregated on each link. Asfar as QoS guarantees are concerned, the main chal-lenges lie in properly specifying aggregate reserva-tions and in ensuring that end-to-end service guaran-tees of individual flows are preserved. The complex-ity of those tasks varies with the type of the service,e.g., Controlled Load and Guaranteed Service, and isdiscussed further in the rest of this section.
In the case of an aggregated Controlled Loadreservation, it is only necessary that the queuesassigned to Controlled Load traffic on backbonelinks be allocated the proper service rate. Since rateis an additive quantity, aggregate reservations can bebased on the sum of the TSpec’s of individual flowsŽ w xsee 61 for a discussion on how TSpec’s are
.summed , although the potential benefits of statisti-
cal multiplexing gain when aggregating many flowsmay allow a lower reservation level. Overall, thesituation is similar to what is described in Section4.1 when using a FCFS scheduler to support Con-trolled Load flows, i.e., the main requirements are toallocate a sufficient aggregate service rate and tocontrol the buffer space that excess traffic can oc-cupy.
The situation is more complex for GuaranteedService flows. The main issue is that the provision ofindividual delay guarantees is tightly coupled withthe ability to precisely guarantee a specific clearingŽ .service rate to a flow. Aggregation affects thisability as characterizing how individual flows sharethe total rate allocated to them is a difficult, if notimpossible, task. Such a characterization is feasiblewhen aggregation is limited to flows with a common
Ž w x .ingress and ingress points see 32,50 for details ,but not when aggregation is done locally at eachbackbone link, e.g., all Guaranteed Service flows areassigned to the same queue. In the latter case, theaggregate service rate on a given backbone link isnot even known to either the ingress or egress routersassociated with the individual flows whose routethrough the backbone includes that link.
In order to support aggregated Guaranteed Serviceflows, it is then necessary to change the ‘‘nodemodel’’ used to represent the backbone. A similarproblem exist when crossing ATM networks, andthis has been addressed by the ISSLL working groupw x21 . The approach used by ISSLL is to characterizean entire ATM network as a single Int-Serv node,that contributes only to the D error term, i.e., repre-sent an ATM network as a delay-only node. Thevalue selected for the D term of the ATM network,is an estimate of the delay bound available from theATM network between the ingress and egress points.A similar approach can be used here by representingeach IP backbone router as a delay-only node, whichremoves the previously mentioned dependency onthe unknown aggregate service rates. The main dif-ference with the case considered by ISSLL, is thatbackbone IP routers can process and update theADSPEC field 8. The characteristics of the path
8 This assumes that RSVP is the signalling protocol used tosetup aggregate reservations.

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´ 187
through the backbone are, therefore, based on thenodes actually traversed, instead of relying on anestimate of the network characteristics between theingress and egress points.
6. Summary
As described in Sections 2 and 3, a wide range ofdata path mechanisms exist that enable support forQoS guarantees in packet networks. They offer abroad choice of trade-offs between complexity, per-formance, and strength of the guarantees being pro-vided. New services have been and are being definedbased on the availability of these mechanisms. How-ever, deployment of these services requires morethan data path innovation. Enhanced control pathmechanisms are needed to enable the specification ofservice guarantees and the identification of who theyapply to. As described in Section 4, progress has alsobeen made in developing such control path mecha-nisms, but their deployment is facing a number ofchallenges.
In particular, the control path and data path costof QoS can vary greatly as a function of the environ-ment where QoS is to be provided. As a result, it isdesirable to allow the use of different control pathand data path mechanisms in different environments.Specifically, it should be possible to support QoSguarantees using either per flow or aggregated mech-anisms based on the characteristics and capabilitiesof the environment where those guarantees are to beprovided. The challenge is then to allow interoper-ability of those different mechanisms, so that end-to-end guarantees can be provided. Issues and possibleapproaches to satisfy this goal were discussed inSection 5.
There are many unanswered questions when itcomes to determining the appropriate QoS model foreach environment, and this paper certainly did notattempt to answer them all. Instead, it tried to clarifytrade-offs and requirements in the hope that thiswould help focus future investigations.
Acknowledgements
The authors would like to acknowledge their manycolleagues at the IBM T.J. Watson Research Centerfor many spirited discussions on the topic of QoS.
Their inputs have helped shape much of the materialin this paper.
References
w x1 A. Ahmadi, P. Chimento, R. Guerin, L. Gun, B. Lin, R.´ ¨Onvural, T. Tedijanto, NBBS traffic management overview,
Ž . Ž .IBM Systems Journal 34 4 December 1995 604–628.w x2 W. Almesberger, J.-Y. Le Boudec, T. Ferrari, Scalable re-
source reservation for the Internet, in: Proc. PROMS-MmNet’97, Santiago, Chili, November 1997.
w x3 J.C.R. Bennett, H. Zhang, Hierarchical packet fair queueingalgorithms, in: Proc. SIGCOMM, Stanford University, CA,August 1996, pp. 143–156.
w x 24 J.C.R. Bennett, H. Zhang, WF Q: worst-case fair weightedfair queueing, in: Proc. INFOCOM, San Francisco, CA,March 1996, pp. 120–128.
w x5 S. Berson, S. Vincent, Aggregation of Internet integratedservices state, Internet Draft, draft-berson-classy-approach-01.txt, November 1997, Work in progress.
w x Ž .6 R. Braden Ed. , L. Zhang, S. Berson, S. Herzog, S. Jamin,Ž .Resource reSerVation Protocol RSVP version 1, functional
Ž .specification, Request for Comments Proposed StandardRFC 2205, Internet Engineering Task Force, September 1997.
w x7 I. Cidon, R. Guerin, A. Khamisy, Protective buffer manage-´Ž . Žment policies, IEEErACM Trans. Networking 2 3 June
.1994 240–246.w x8 I. Cidon, R. Guerin, A. Khamisy, K. Sivarajan, Cell versus´
message level performances in ATM networks, Telecommun.Ž .Sys. 5 1996 223–239.
w x9 D. Clark, Adding service discrimination to the Internet,Ž . Ž .Telecommunications Policy 20 3 April 1996 169–181.
w x10 D. Clark, J. Wroclawski, An approach to service allocation inthe Internet, Internet Draft, draft-clark-diff-svc-alloc-00.txt,July 1997, Work in progress.
w x11 R.L. Cruz, Service burstiness and dynamic burstiness mea-Ž . Ž .sures: a framework, J. High Speed Networks 1 2 1992
105–127.w x12 R.L. Cruz, Quality of service guarantees in virtual circuit
Ž .switched networks, IEEE J. Select. Areas Commun. 13 6Ž .August 1995 1048–1056.
w x13 G. Delp, J. Byrn, M. Branstad, K. Plotz, P. Leichty, A.Slane, G. McClannahan, M. Carnevale, ATM function speci-fication: CHARM introduction – version 3.0, Technical Re-port ROCH431-CHARM Intro, IBM ASr400 Division, LANDevelopment, February 1996.
w x14 A. Demers, S. Keshav, S. Shenker, Analysis and simulationof a fair queueing algorithm, Journal of Internetworking:
Ž .Research and Experience 1 January 1990 3–26.w x15 E. Ellesson, S. Blake, A proposal for the format and seman-
tics of the TOS byte and traffic class byte in IPv4 and IPv6headers, Internet Draft, draft-ellesson-tos-00.txt, November1997, Work in progress.
w x16 P. Ferguson, Simple differential services: IP TOS and prece-dence, delay indication, and drop preference, Internet Draft,

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´188
draft-ferguson-delay-drop-00.txt, November 1997, Work inprogress.
w x17 V. Firoiu, J. Kurose, D. Towsley, Efficient admission controlfor EDF schedulers, in: Proc. INFOCOM, Kobe, Japan,March 1997.
w x18 S. Floyd, V. Jacobson, Random early detection gateways forŽ .congestion avoidance, IEEErACM Trans. Networking 1 4
Ž .August 1993 397–413.w x19 S. Floyd, V. Jacobson, Link-sharing and resource manage-
ment models for packet networks, IEEErACM Trans. Net-Ž . Ž .working 3 4 August 1995 365–386.
w x Ž .20 I. Foster, C. Kesselman Eds. , The Grid: A Blueprint for theNew Computing Infrastructure, Morgan Kaufman, San Fran-cisco, CA, 1998.
w x21 M.W. Garrett, M. Borden, Interoperation of controlled-loadservice and guaranteed service with ATM, Internet Draft,draft-ietf-issll-atm-mapping-04.txt, November 1997, Work inprogress.
w x22 L. Georgiadis, R. Guerin, A. Parekh, Optimal multiplexing´on a single link: Delay and buffer requirements, IEEE Trans.
Ž . Ž .Infor. Theory 43 5 September 1997 1518–1535.w x23 L. Georgiadis, R. Guerin, V. Peris, R. Rajan, Efficient´
support or delay and rate guarantees in an Internet, in: Proc.SIGCOMM, San Francisco, CA, August 1996, pp. 106–116.
w x24 L. Georgiadis, R. Guerin, V. Peris, K.N. Sivarajan, Efficient´network QoS provisioning based on per node traffic shaping,
Ž . Ž .IEEErACM Trans. Networking 4 4 August 1996 482–501.
w x25 R.J. Gibbens, P.J. Hunt, Effective bandwidths for the multi-Ž .type UAS channel, Queueing Systems 9 September 1991
17–28.w x26 S.J. Golestani, A self-clocked fair queueing scheme for
broadband applications, in: Proc. INFOCOM, Toronto,Canada, June 1994, pp. 636–646.
w x27 S.J. Golestani, Network delay analysis of a class of fairŽ .queueing algorithms, IEEE J. Select. Areas Commun. 13 6
Ž .August 1995 1057–1070.w x28 P. Goyal, H. Chen, H. Vin, Start-time fair queueing: A
scheduling algorithm for integrated services packet switchingnetworks, in: Proc. SIGCOMM, Stanford University, CA,August 1996, pp. 157–168.
w x29 P. Goyal, H. Vin, Generalized guaranteed rate schedulingalgorithms: A framework, Technical Report TR-95-30, De-partment of Computer Sciences, University of Texas atAustin, 1995.
w x30 M. Grossglauser, D. Tse, Framework for robust measure-ment-based admission control, in: Proc. SIGCOMM, SophiaAntipolis, France, September 1997, pp. 237–248.
w x31 R. Guerin, H. Ahmadi, M. Naghshineh, Equivalent capacity´and its application to bandwidth allocation in high-speed
Ž . Žnetworks, IEEE J. Select. Areas Commun. SAC-9 7 Sep-.tember 1991 968–981.
w x32 R. Guerin, S. Blake, S. Herzog, Aggregating RSVP-based´QoS requests, Internet Draft, draft-guerin-aggreg-rsvp-00.txt,November 1997, Work in progress.
w x33 R. Guerin, S. Kamat, V. Peris, R. Rajan, Scalable QoS´provision through buffer management, in: Proc. SIGCOMM,
Vancouver, British Columbia, Canada, September 1998, pp.29–40.
w x34 L. Gun, An approximation method for capturing complex¨traffic behavior in high speed networks, Performance Evalua-
Ž . Ž .tion 19 1 January 1994 5–23.w x35 L. Gun, R. Guerin, Bandwidth management and congestion¨ ´
control framework of the broadband network architecture,Ž . ŽComputer Networks and ISDN Systems 26 1 September
.1993 61–78.w x36 J. Heinanen, Use of the IPv4 TOS octet to support differen-
tial services, Internet Draft, draft-heinanen-diff-tos-octet-00.txt, October 1997, Work in progress.
w x37 S. Jamin, P.B. Danzig, S.J. Shenker, L. Zhang, Measure-ment-based admission control algorithm for integrated ser-
Ž .vice packet networks, IEEErACM Trans. Networking 5 1Ž .February 1997 56–70.
w x38 F. Kamoun, L. Kleinrock, Analysis of shared finite storage ina computer network node environment under general traffic
Ž .conditions, IEEE Trans. Commun. COM-28 1980 992–1003.
w x39 M. Katevenis, S. Sidiropoulos, C. Courcoubetis, Weightedround-robin cell multiplexing in a general-purpose ATM
Ž .switch chip, IEEE J. Select. Areas Commun. SAC-9 8Ž .October 1991 1265–1279.
w x40 F.P. Kelly, Effective bandwidth at multi-class queues,Ž .Queueing Systems 9 September 1991 5–16.
w x Ž .41 K. Kilkki, Simple integrated media access SIMA , InternetDraft, draft-kalevi-simple-media-access-01.txt, June 1997,Work in progress.
w x42 H. Kroner, G. Hebuterne, P. Boyer, A. Gravey, Priority¨ ´management in ATM switching nodes, IEEE Trans. Com-
Ž . Ž .mun. COM-9 3 April 1991 418–427.w x43 J.-Y. Le Boudec, Application of network calculus to guaran-
Ž .teed service networks, IEEE Trans. Infor. Theory 44 3Ž .May 1998 .
w x44 D. Lin, R. Morris, Dynamics of random early detection, in:Proc. SIGCOMM, September 1997, pp. 127–137.
w x45 A.K. Parekh, R.G. Gallager, A generalized processor sharingapproach to flow control in integrated services networks: The
Ž . Žsingle-node case, IEEErACM Trans. Networking 1 3 June.1993 344–357.
w x46 A.K. Parekh, R.G. Gallager, A generalized processor sharingapproach to flow control in integrated services networks: The
Ž .multiple node case, IEEErACM Trans. Networking 2 2Ž .April 1994 137–150.
w x47 A.K.J. Parekh, A generalized processor sharing approach toflow control in integrated services networks, Ph.D. thesis,Laboratory for Information and Decision Systems, Mas-sachusetts Institute of Technology, Cambridge, MA 02139,February 1992, No. LIDS-TH-2089.
w x48 V. Peris, Architecture for guaranteed delay service in highspeed networks, Ph.D. thesis, University of Maryland, Col-lege Park, 1997.
w x49 J. Postel, Internet protocol, Request for Comments, RFC 791,Ž .standard , Internet Engineering Task Force, September 1981.
w x50 S. Rampal, R. Guerin, Flow grouping for reducing reserva-´tion requirements for Guaranteed Delay service, Internet

( )R. Guerin, V. PerisrComputer Networks 31 1999 169–189´ 189
Draft, draft-rampal-flow-delay-service-01.txt, July 1997,Work in progress.
w x51 A. Romanow, S. Floyd, Dynamics of TCP traffic over ATMŽ . Ž .networks, IEEE J. Sel. Areas Commun. 13 4 May 1995
633–641.w x Ž . Ž .52 P. Samudra Ed. . ATM User-Network Interface UNI sig-
nalling specification, version 4.0, ATM Forum SignallingWorking Group, July 1996.
w x53 H. Sariowan, A service curve approach to performance guar-antees in integrated service networks, Ph.D. thesis, Univer-sity of California, San Diego, 1996.
w x54 S. Shenker, C. Partridge, R. Guerin, Specification of guaran-´Žteed quality of service, Request for Comments Proposed
.Standard RFC 2212, Internet Engineering Task Force,September 1997.
w x55 S. Shenker, J. Wroclawski, General characterization parame-ters for integrated service network elements, Request for
Ž .Comments Proposed Standard RFC 2215, Internet Engi-neering Task Force, September 1997.
w x56 M. Shreedhar, G. Varghese, Efficient fair queuing usingŽ .deficit round-robin, IEEErACM Trans. Networking 4 3
Ž .1996 375–385.w x57 D. Stiliadis, A. Varma, Frame-based fair queueing: A new
traffic scheduling algorithm for packet-switched networks,in: Proc. SIGMETRICS’96, 1996.
w x58 D. Stiliadis, A. Varma, Latency-rate servers: A general modelfor analysis of traffic scheduling algorithms, in: Proc. INFO-COM, San Francisco, CA, April 1996, pp. 111–119.
w x59 J. Turner, Maintaining high throughput during overload inATM switches, in: Proc. INFOCOM, San Francisco, CA,April 1996, pp. 287–295.
w x60 J. Wroclawski, Specification of the controlled-load networkŽ .element service, Request for Comments Proposed Standard
RFC 2211, Internet Engineering Task Force, September 1997.w x61 J. Wroclawski, The use of RSVP with IETF integrated
Ž .services, Request for Comments Proposed Standard RFC2210, Internet Engineering Task Force, September 1997.
w x62 H. Zhang, D. Ferrari, Rate-controlled service disciplines, J.Ž . Ž .High Speed Networks 3 4 1995 389–412.
Vinod Peris obtained the B. Tech. de-gree in Electrical Engineering from theIndian Institute of Technology, Kanpur,in 1989 and the M.S and Ph.D. degreesin Electrical Engineering from the Uni-versity of Maryland, College Park in1992 and 1997 respectively. Since Jan-uary 1995 he has been with IBM at theT.J. Watson Research Center, YorktownHeights, New York, where he is a Re-search Staff Member in the networkingdepartment. His research interests span a
variety of topics in networking ranging from network security toQuality of Service. He was a co-recipient of the Best Paper Awardat the ACM SIGMETRICS’94 conference.
Roch Guerin received the ‘‘Diplome´ ˆ´d’lngenieur’’ from the Ecole Nationale´
Superieure des Telecommunications,´ ´ ´Paris, France, in 1983, and his M.S. andPh.D. from the California Institute ofTechnology, both in Electrical Engineer-ing, in 1984 and 1986 respectively. Herecently joined the Department of Elec-trical Engineering of the University ofPennsylvania, where he is Professor andholds the chair in telecommunications.Before joining the University of Penn-
sylvania, he had been with IBM at the Thomas J. Watson Re-search Center, Yorktown Heights, New York, since 1986, wherehe was the Manager of the Network Control and Services depart-ment prior to his departure. His current research interests are inthe general area of Quality-of-Service support in high-speed net-works, and in particular QoS routing and scheduling and buffermanagement mechanisms. He is also interested in aggregationtechniques, in terms of both protocols and service models, forscalable service deployment.
Dr. Guerin is a member of Sigma Xi and a Senior member of the´IEEE Communications Society. He is an editor for the IEEErACMTransactions on Networking, and an area editor for the IEEECommunications Surveys. He is the current chair for the IEEETechnical Committee on Computer Communications, served at theGeneral Chair for the IEEE INFOCOM’98 conference, and hasbeen active in the organization of many conferences and work-shops such as the ACM SIGCOMM conference, the WEE ATMWorkshop, etc. He was an editor for the IEEE Transactions onCommunications and the IEEE Communications Magazine. In1994 he received an IBM Outstanding Innovation Award for hiswork on traffic management in the BroadBand Services NetworkArchitecture. His email address is: [email protected].