Embed Size (px)
Citation preview

Pulse oximeter
Pulse oximeter
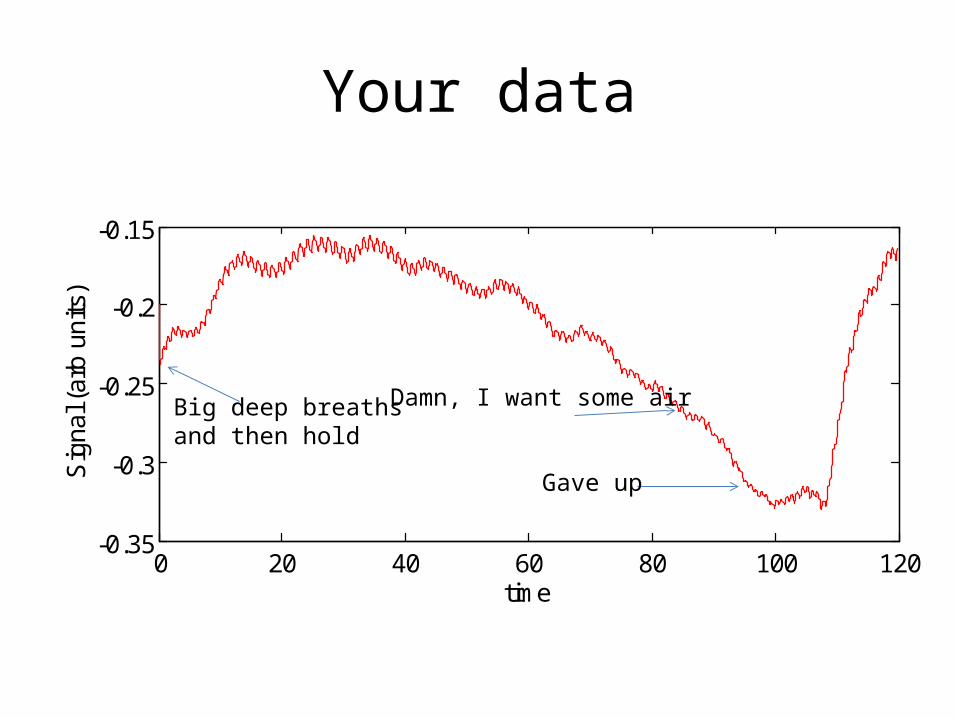
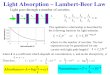
Your data
0 20 40 60 80 100 120-0.35
-0.3
-0.25
-0.2
-0.15
time
Sig
nal (
arb
units
)
Big deep breathsand then hold
Damn, I want some air
Gave up

Photodiode detection
photodiode
Detectorsignal
R 5
1M
+5 VU 2 A
L M C 6 4 8 4
1
3
2
411
O U T
+
-
V+
V-
Photodiode: Current is proportional to amount of light hitting the detector
Detection demo
We will do something else…
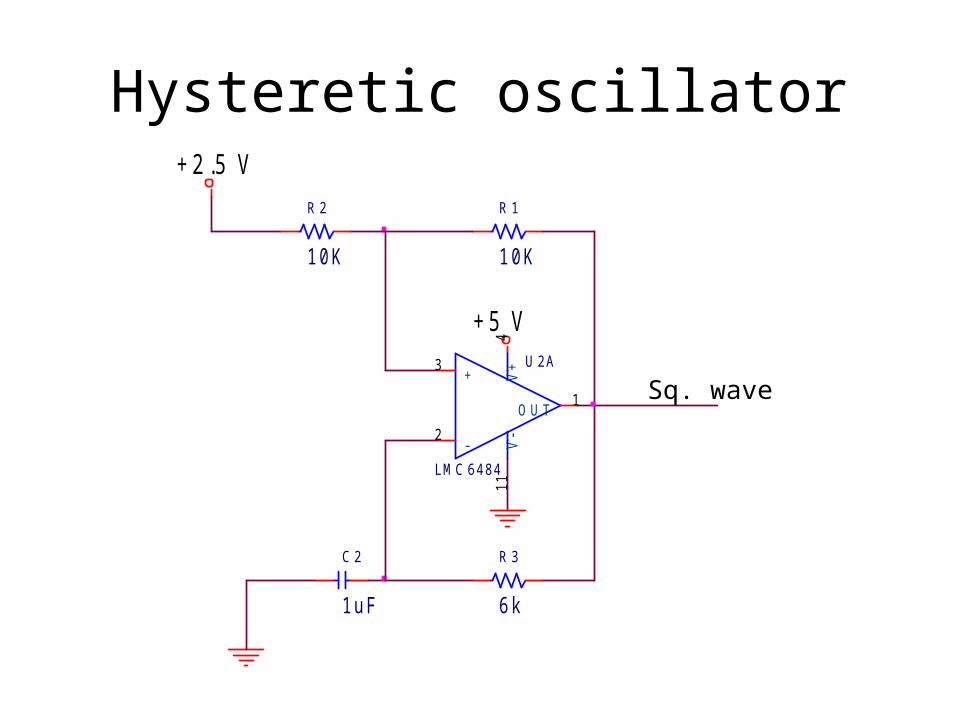
Hysteretic oscillator
+5 V
R 1
10K
U 2 A
L M C 6 4 8 4
1
3
2
411
O U T
+
-
V+
V-
+2.5 V
C 2
1uF
Sq. wave
R 2
10K
R 3
6k

Hysteretic oscillator
0 0.005 0.01 0.015 0.02 0.025 0.030
1
2
3
4
5
time (s)
V
outputV-V+
+5 V
R 1
10K
U 2 A
L M C 6 4 8 4
1
3
2
411
O U T
+
-
V+
V-
+2.5 V
C 2
1uF
Sq. wave
R 2
10K
R 3
6k
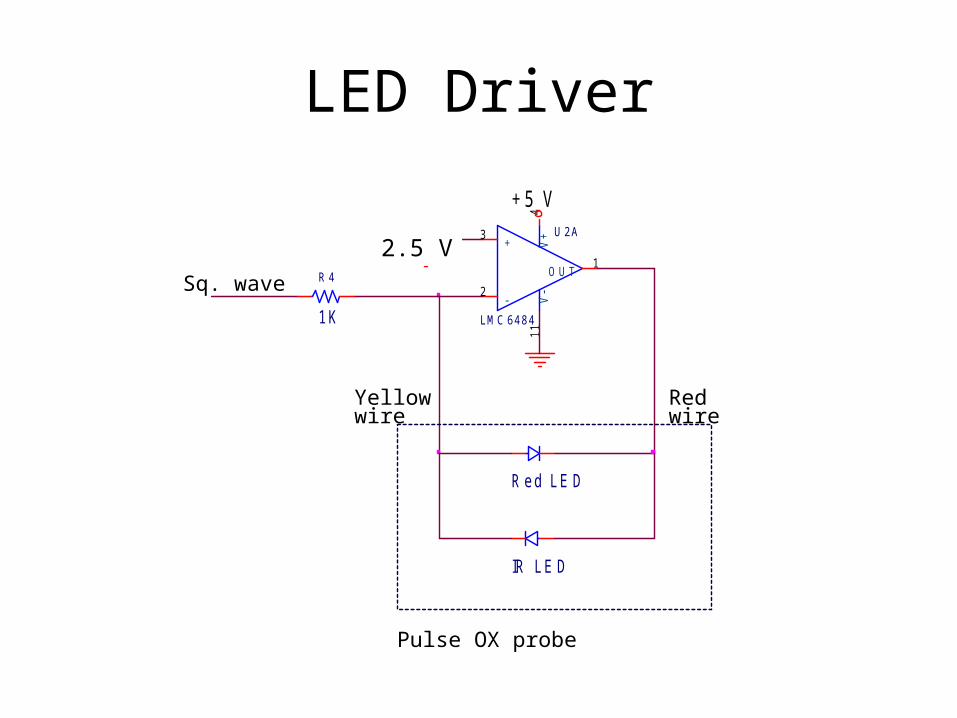
LED Driver
Redwire
U 2 A
L M C 6 4 8 4
1
3
2
411
O U T
+
-
V+
V-
IR LE D
Red LE D
Sq. wave R 4
1K
+5 V
Yellow wire
Pulse OX probe
2.5 V
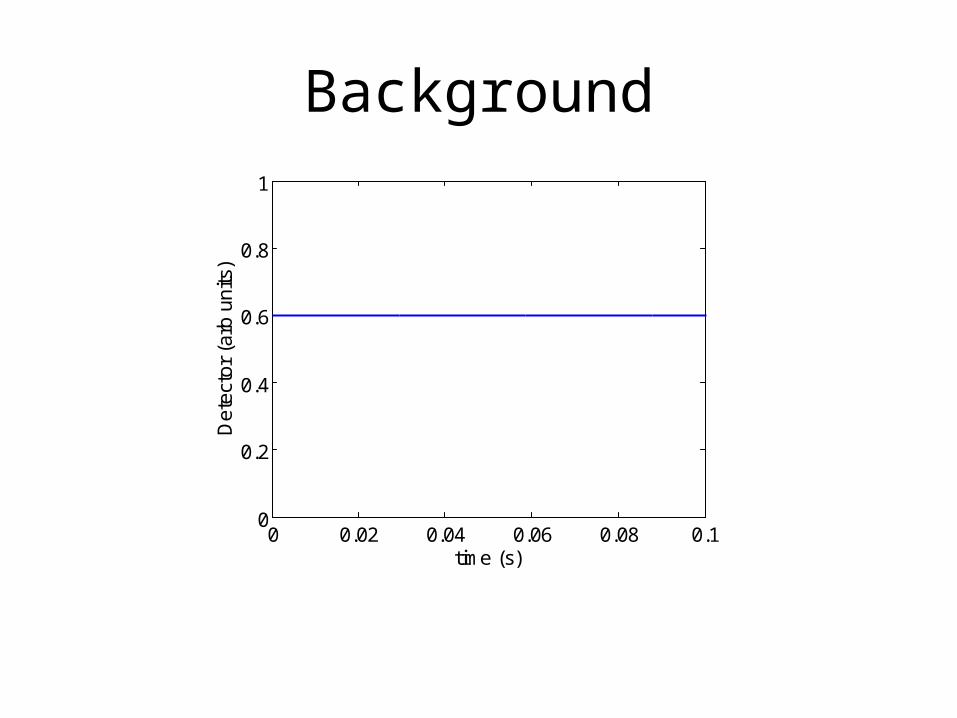
Background
0 0.02 0.04 0.06 0.08 0.10
0.2
0.4
0.6
0.8
1
time (s)
Det
ecto
r (a
rb u
nits
)
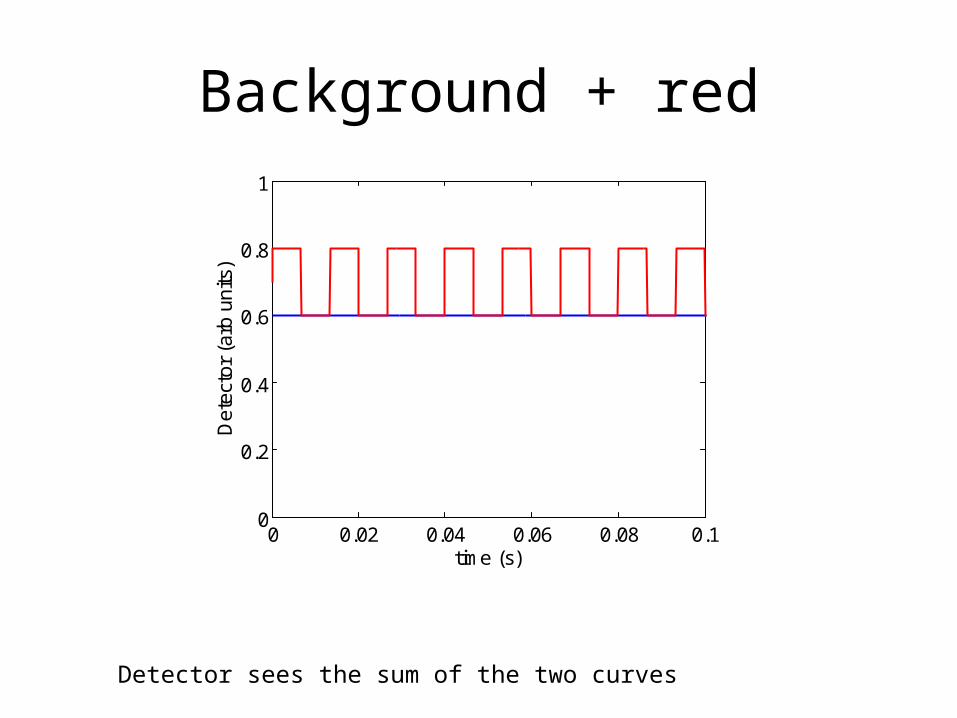
Background + red
Detector sees the sum of the two curves
0 0.02 0.04 0.06 0.08 0.10
0.2
0.4
0.6
0.8
1
time (s)
Det
ecto
r (a
rb u
nits
)
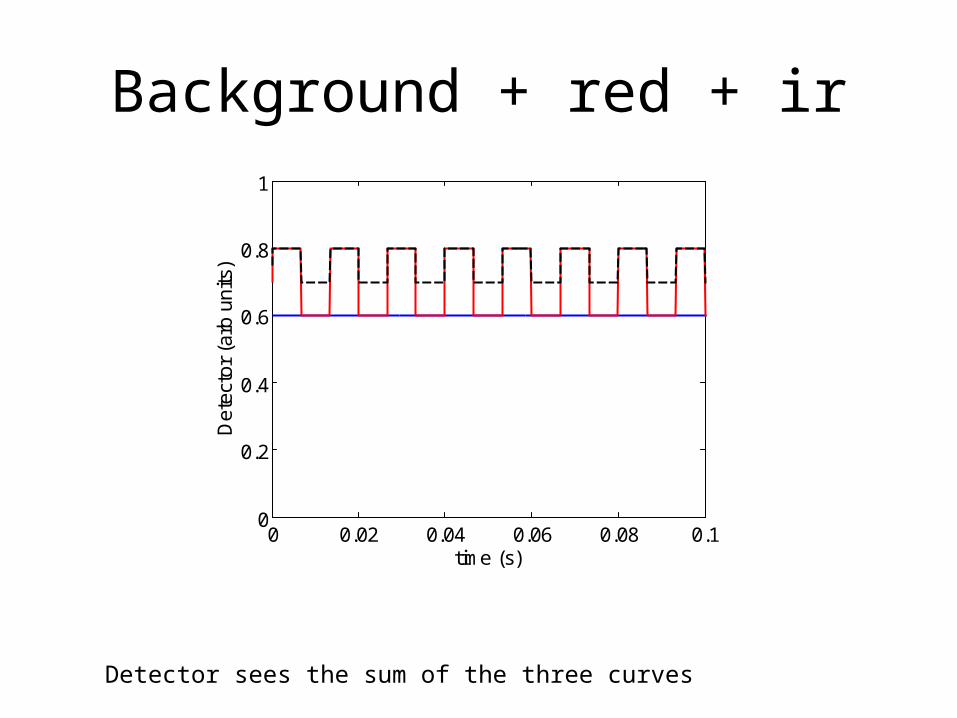
Background + red + ir
Detector sees the sum of the three curves
0 0.02 0.04 0.06 0.08 0.10
0.2
0.4
0.6
0.8
1
time (s)
Det
ecto
r (a
rb u
nits
)
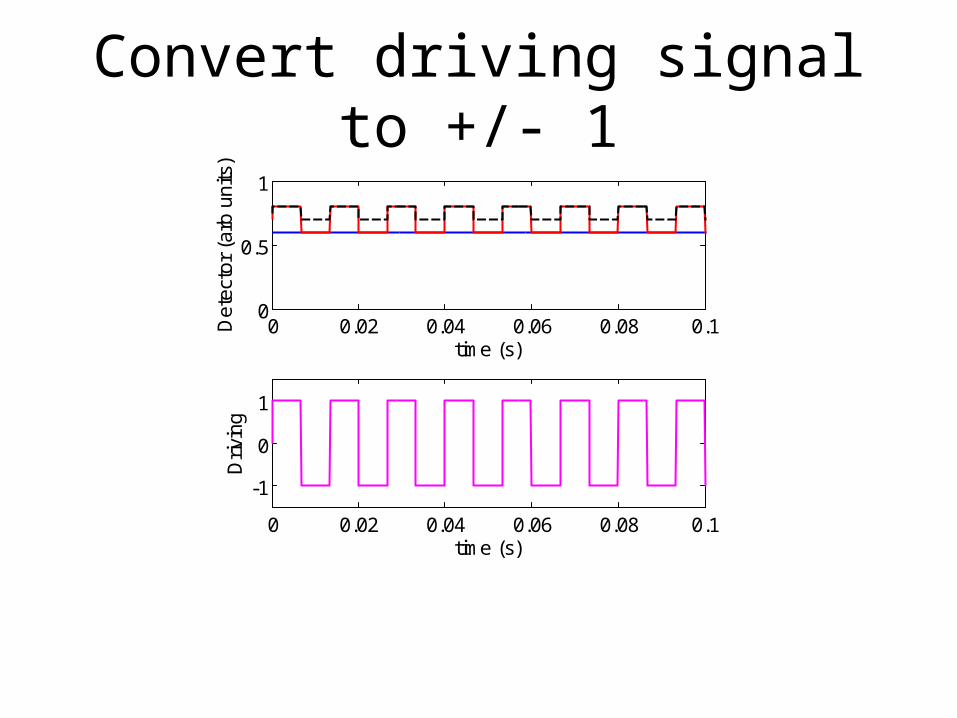
Convert driving signal to +/- 1
0 0.02 0.04 0.06 0.08 0.10
0.5
1
time (s)
Det
ecto
r (a
rb u
nits
)
0 0.02 0.04 0.06 0.08 0.1
-1
0
1
time (s)
Driv
ing

Multiply +/- 1 and detector
0 0.02 0.04 0.06 0.08 0.10
0.5
1
time (s)
Det
ecto
r (a
rb u
nits
)
0 0.02 0.04 0.06 0.08 0.1-1
0
1
time (s)
Driv
ing
Blue – bg onlyRed – bg + red LEDBlack - bg +red + ir
Driv
ing
* D
etec
tor

Integrate w.r.t time - background
0 0.05 0.1 0.15 0.2
-1
0
1
time (s)
Driv
ing*
dete
ctor
0 0.05 0.1 0.15 0.2 0.25 0.3-0.2
0
0.2
0.4
0.6
time (s)
cum
mul
ativ
e in
tegr
al
(t)) dt

Integrate w.r.t time - bg +red
0 0.05 0.1 0.15 0.2
-1
0
1
time (s)
Driv
ing*
dete
ctor
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
time (s)
cum
mul
ativ
e in
tegr
al

Integrate w.r.t time - bg +red+ir
0 0.05 0.1 0.15 0.2
-1
0
1
time (s)
Driv
ing*
dete
ctor
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
time (s)
cum
mul
ativ
e in
tegr
al

Converges to average difference between red and ir
0 0.2 0.4 0.6 0.8 10
0.02
0.04
0.06
0.08
0.1
time (s)
cum
mul
ativ
e in
tegr
al
We will keep the running integral by using a low-pass filter
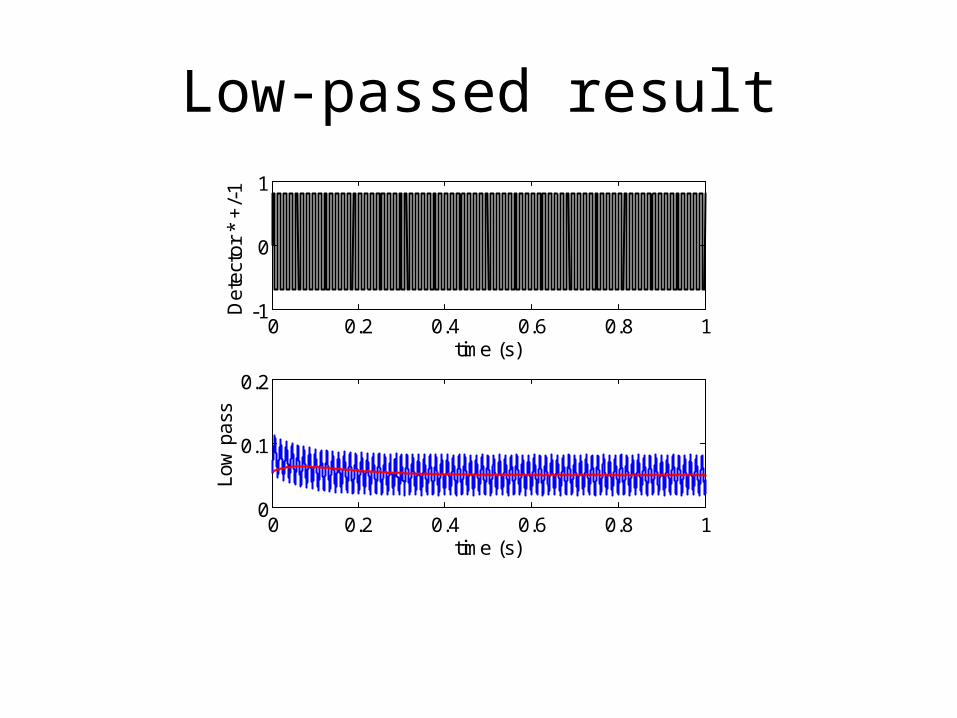
Low-passed result
0 0.2 0.4 0.6 0.8 1-1
0
1
time (s)
Det
ecto
r *
+/-
1
0 0.2 0.4 0.6 0.8 10
0.1
0.2
time (s)
Low
pas
s

How do we implement a low pass filter in software?