Embed Size (px)
Citation preview

PS217 - Vibrations and Waves
Section I Introduction to Oscillatory MotionSection II The Simple Harmonic Oscillator (SHO)Section III The Damped Harmonic Oscillator (DHO)Section IV Some Complex AlgebraSection V Forced OscillationsSection VI Coupled OscillatorsSection VII Waves and the Wave EquationSection VIII Periodic and Non–Periodic Waves and the
Fourier Representation of Waves
Indicative Syllabus

3. The Damped Harmonic Oscillator.
In reality oscillators are not ideal: there are various dampingmechanisms present and total energy reduces with time. For example- the tuning fork.
The sound intensity (∝ amplitude2 - A2)steadily decreases. Actually thedamping is very light. Fork vibrates forabout 5s i.e. for a few to tens ofthousands ofoscillations……
Source: ibp.fraunhofer.de

3. The Damped Harmonic Oscillator.
In reality oscillators are not ideal: there are various dampingmechanisms present and total energy reduces with time. For example- the tuning fork.
The sound intensity (∝ amplitude2 - A2)steadily decreases. Actually thedamping is very light. Fork vibrates forabout 5s i.e. for a few to tens ofthousands ofoscillations……
Remember our mass on a spring,with no damping.
SOURCE: http://www.sciencebuddies.org/science-fair-projects/project_ideas/Phys_img072.gif

3. The Damped Harmonic Oscillator.
In reality oscillators are not ideal: there are various dampingmechanisms present and total energy reduces with time. For example- the tuning fork.
The sound intensity (∝ amplitude2 - A2)steadily decreases. Actually thedamping is very light. Fork vibrates forabout 5s i.e. for a few to tens ofthousands ofoscillations……
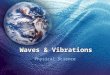
Now add damping.
Observe: • decreasing amplitude• but constant frequency
SOURCE: http://illogictree.com/wp-content/uploads/2010/01/FileDamped-spring.gif

Lets guess what x(t) - the displacement of mass ‘m’ might look like.
Expect: x(t) ≈ (amplitude that varies with time) × (cos ωt), where ωis very similar to, but perhaps not necessarily the same as, forundamped case. One clue is that amplitude reduces by equalfractions in equal times, i.e., exponentially…….
i.e. x(t) = (Ae-βt) cos ωt, and ω ~ ωo- remember observation and physical intuition !!!
Next we need to develop the equation of motion for DSHM….In practice the damping is often due to frictional forces
that are proportional to the velocity v.
e.g. Stoke’s law for a frictional force exhibited on a spherical objectmoving a fluid at velocity ‘v’ - fluid: F = 6πηav, i.e., F ∝ v, where η isviscosity of medium and a is radius of sphere. e.g. cars and raindrops.
The damping force is in the opposite direction to that of thevelocity.

So for our example of mass on spring, the force on the mass will be amodified Hooke’s Law in which the damping force (-bv) is added, i.e.,
F = -kx – bv where –bv is damping force
k: force/unit length (Nm-1), b: force/unit velocity (kgs-1)
Applying Newton’s law we get : mx’’ = -kx – bx’
Making the substitutions: γ = b/m and ωo2 = k/m
where ωo is the angular frequency for the undamped case, we obtainthe Equation of Motion for Damped Harmonic Motion of the Mass-Spring System:
or more explicitly:
!
x"+"x'+#0
2x = 0
!
d2x
dt2
+ "dx
dt+#
0
2x = 0

3.1 Solutions for the damped SHO
We distinguish between light and heavy damping
(i) Light damping,
We guessed the solution, x = (Ae-βt) cos ωt, where β is a constantand ω is not necessarily equal to ωo
Then find x’ and x’’ and substitute into our DE: x’’ + γ x’ + ωo2x = 0
Using product rule: d/dt (fg) = fdg/dt + g df/dt,where f and g are functions of t, f(t) = Ae-βt & g(t) = cos(ωt)…….
Obtain, x’ =Ae-βt(-ωsin ωt) + cos ωt(- β Ae-βt)= Ae-βt(-ωsin ωt - β cos ωt) and
x’’ = Ae-βt( - ω2 cos ωt + βωsin ωt) + Ae-βt (- β)(-ωsin ωt- β cos ωt)= Ae-βt(2βωsin ωt + [β2- ω2].cos ωt)

Substitute into the DSHO - DE - x’’ + γ x’ + ωo2x = 0.
Collecting terms in sin(ωt) & cos(ωt) we obtain
Ae-βt[(2βω - γω) sin ωt + (β2-ω2- γβ + ωo2) cos ωt] = 0
This can only be true for all t if sin and cos terms are both = 0. Thismeans that their coefficients must both = 0
So if must be true that:2βω - γω = 0 ⇒ β = γ/2,and
β2-ω2- γβ + ωo2 = 0
Substitute for β (= γ/2) to obtain: γ2/4 - ω2- γ2/2 + ωo
2 = 0
Which, in turn gives us that:
ω2 = ωo2 - γ2/4 the frequency of damped oscillation (≠ωo unless γ=0).

So finally we obtain that:x(t) = Ae-γt/2 cos [ωo
2 - γ2/4]1/2.t]
is a solution of: x’’ + γ x’ + ωo2x = 0
with γ = b/m and ω2 = k/m – b2/4m2
for the damped mass on a spring case……
Source: http://apiimages.nethelper.edgecaching.net/commons/thumb/e/e8/Damping.svg/200px-Damping.svg.png

Consider successive maxima An and An+1 occuring at times t and (t+T)apart, where T is period.
Then An = x(t) = Ae-γt/2 cos ωt
and An+1 = x(t+T) = Ae-γ(t+T)/2 cos ω(t+T)
An/An+1 = e-γt/2 /e-γ(t+T)/2 = eγT/2
since cos ωt = cos ω(t+T)
i.e., the amplitude decays by an equal fraction in an equal amountof time.
Ln(An/An+1) = γT/2 is called the logarithmic decrement andmeasures the rate at which the amplitude dies away.
A = 1
Source: http://farside.ph.utexas.edu/teaching/315/Waves/img302.png

(ii) Heavy damping What would you expect for heavy damping?

(ii) Heavy damping What would you expect for heavy damping?
No oscillations and the mass returns slowly to rest. So a cosinefunction is not appropriate. Let’s try a general function:
f(t). ie x(t) = A e-γt/2.f(t).
Substitute x(t) (and its derivatives x’ and x”) into our DE to obtain:
f’’ + f(ωo2 - γ2/4) = 0 (you show this - use product rule……)
For heavy damping, i.e., γ2/4 >> ωo2 and we write f’’ = α2 f ,
where α2 = (γ2/4 - ωo2) is a positive quantity, i.e., α2 > 0
This has general solution: f = a eαt + b e-αt, giving the
displacement, x(t) = A e-γt/2. [a.eαt + b.e-αt]
As expected, the mass moves slowly back to equilibrium positionwithout oscillation.

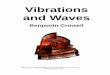
(ii) Heavily (Over) -Damped Systems
Source: http://mathworld.wolfram.com/images/eps-gif/SHOOverdamped_900.gif

(iii) Critical damping For special case where, γ2/4 = ωo2
we obtain, f’’ = 0
This has general soln. f = a + bt, and hence: x(t) = A e-γt/2 (a + bt)
For special case of critical damping the mass returns to itsequilibrium position most quickly with no oscillations.
Note that in many cases, damping is a good thing. Critical damping isan important consideration in e.g., car shock absorbers…….
Source: http://mathworld.wolfram.com/images/eps-gif/SHOCriticallyDamped_900.gif

3.2 Rate of energy loss in a damped oscillator
For a damped oscillator the mechanical energy is not conserved: it isdissipated as heat. For the lightly damped case we have that:
x(t) = Ae-γt/2 cos ωt
We can write amplitude dependence with time as
A(t) = Ao e-γt/2 where Ao is amplitude at t = O.
We also have from the undamped mass-spring case that:
E = ½ mv2 + ½ kx2 = ½ kA2
i.e., E(t) = ½ k A(t)2, = ½ k [Aoe-γt/2]2 = ½ k Ao2
e-γt
yielding E(t) = Eoe-γt, where Eo is energy at time t = 0
- the important result is that energy decays exponentially with time !

3.3 The “Quality factor” of a damped oscillator
We want to quantify how good an oscillator is:
Since the time dependence of the energy is: E(t) = Eoe-γt,
When t = 1/γ, E(t) = Eoe-1 = Eo/e
So γ is the reciprocal of the time taken for E to reduce by afactor of e
Note that ωo and γ have the same dimensions [time]-1. γ is acharacteristic of exponential decay of amplitude and ωo
is a
characteristic of oscillatory motion.
We designate and define the quality factor; Q = ωo/γwhere Q is a pure number. The larger Q the better theoscillator.

Example: the sound intensity (proportional to A2) from a tuning fork(F = 440 Hz) decreases by a factor of 5 in 4s. Remember thatIntensity (Watts) is Energy (joules)/Time (seconds)………
So the sound intensity is proportional to energy of oscillation.
∴ Eoe0/ Eoe-4γ = e4γ = 5 ⇒ 4γ = ln 5 and γ = 0.4 s-1
Then, Q = ωo/γ = 2π.440 / 0.4 ≈ 7000 high or what !
Another example: an excited atom emitting radiation.
Here γ ∼ 1/atomic lifetime ∼ 1/10-8 ∼ 108 s-1
& ωo = 2πf = 2πc/λ where typical λ is 500×10-9 m (500 nm)
⇒ ωo = 2π. 3×108/500×10-9 ∼ 4×1015 rads s-1
⇒Q = ωo/γ ∼ 4×107 !! Really very high indeed --
Atoms are great oscillators - why we have the Atomic Clock….!!

From the above:
γ2 = ωo2/Q2
and recalling that:
ω2 = ωo2 - γ2/4
So we have that:ω = ωo (1- 1/4Q2)1/2
When damping is small, Q is large and therefore ω ≈ ωo
Example: Even for a modest value of Q = 5:
then ω = ωo(1- 1/4.52)1/2 = ωo(1- 1/100)1/2 ≈ ωo(1- 1/200)
i.e ω is different from ωo by just 0.5%

Recall that the variation of energy with time for a damped oscillatoris given by:
E(t) = Eoe-γt
Let E1 = Eoe-γt and E2 = Eoe-γ(t+T)
∴E2/E1 = e-γ(t+T)/ e-γt = e-γT ≈ (1 - γT) for γT << 1
i.e. light damping
∴ E2 ≈ E1 - E1γT
and (E1 - E2)/E1 ≈ γT ≈ 2πγ/ωo ≈ 2π/Q assuming ω ≈ ωo
So fractional change in energy/cycle = 2π/QOR fractional change in energy/radian = 1/Q

3.4 Electrical example of a damped oscillator - LCR Circuit.
Here we have an inductor, L, capacitor, C and resistance R (dampingelement) connected in series. We charge capacitor to voltage V andthen close the switch.
Kirchoff’s law gives:
VL + VR +VC = 0
LdI/dt + RI + q/C = 0
i.e., Lq’’ + Rq’ + q/C = 0,
Or q’’ + R/L q’ + q/LC = 0
Cf: mx’’ + b x’ + kx = 0
or x’’ + γ x’ + ωo2 x = 0 where ωo
2 = k/m

Comparing the mechanical and electrical systems, we see that:
x ≡ q, m ≡ L and k ≡ 1/C as before,
but also b ≡ R and γ ≡ R/L
So it is immediately clear (I hope) that for the LCR circuit:
ωo2 = 1/LC
Recalling, x(t) = Ae-γt/2cos[ωo2 - γ2/4]1/2t for light damping…….
The time variation of the charge in this (damped oscilliatory)circuit is:
q(t) = Ae-Rt/2Lcos[1/LC - R2/4L2]1/2t for R2/4L2 < 1/LC

Since C = q/V, V(t) = q(t)/C and so voltage across capacitor varieswith time like:
V(t) = Vo e-Rt/2Lcos[1/LC - R2/4L2]1/2t
Quality factor Q = ωo/γ for mechanical case, becomes
Q = 1/√LC . L/R = 1/R √L/C
and energy in circuit will decease as e-Rt/L
NB:For R2/4L2 = 1/LC we obtain critical damping and oscillations stop.
For R2/4L2 > 1/LC we get heavy damping.
So by understanding the classical oscillatory mechanical system wecan also understand the equivalent electrical systems.

Name: John T. CostelloFunction: Associate Dean (Research) - Faculty of Science
and Health
Email: [email protected]*:http://www.physics.dcu.ie/~jtcPhone: 7005304Fax: 7005383
* Lecture notes will be uploaded onto this webpage aftereach section is completed
Acknowledgment: OHPs based on the textbook and lecture notes of Prof. G. King to whom the author expresses his gratitude.
Contact Details