-
8/8/2019 Project Two Report
1/43
ProjectTwoSingle degree of freedom analysisAaronCanning
ScottHarrison
StephenShew
DavidSteele
JacksonSupit
NathanMcCosker
8/3/2009
-
8/8/2019 Project Two Report
2/43
-
8/8/2019 Project Two Report
3/43
Projectoverview
Thisreportisananalysisoftheperformanceofasimpleboxtrailerssuspensionsystem.Theanalysis
willbebasedonthetrailerbeingviewedasamechanicalsystemwithasingledegreeoffreedomfor
anymovement. Itwillbeassumed that the towbarof the trailer
isconnected toa singlevertical
slider,henceeliminatinganyrollorpitch.Thustherewillonlybeverticalmotioninthesystem.
The systemwillbeanalysed inmanydifferentsituations including
freevibration, forcedand road
surfaceforcedscenarios.Allofwhich,willbeanalysedregardingresonance,transmissibilityfactoras
wellasbeingmodelledinsimulink.
-
8/8/2019 Project Two Report
4/43
Listofassumptions
Forthewholesystem
The Maximum displacement of the trailer in the vertical
direction is 0.2m. Hence theamplitude,X,is0.2
Critical dampening is designed to occur when the trailer is
fully loaded (2000kg). This
isassumedbecausegenerallymoreloadmeansmoreobjectswillbecarriedandhencethere
willbemoreprotectionneeded.
Thetrailerisstationaryonlevelgrounduntiltheroadsurfaceanalysis.
Thespringsactasoneinthesystemandareviewedasasinglespringanddampener.
Engineforcedvibration
The eccentric mass of the skid mounted compressor it 100grams
with an eccentricity of10cm. It isassumed the imbalance isdue to
the rotationof thecrankshaftaswellas the
movementofpistons.Theengineisverybadlymaintained.
Thecompressorhasbeenmounteddirectlyovertheaxleofthetrailertodirectthemotionoftheeccentricmassthroughthesystemandsimplifythecalculation.
Theengineiscompletelyfixedtothebackofthetrailerwithnoloosemovement.
Themassesofthetrailerandengineareusedtogetherasonemass.
RoadInductedVibrations
Roadsurfaceismodelledbyasinewavetosimulatethetrailerbeingpulledacrosscorrugations.
Corrugationshave:o Amplitudeof0.1mo Wavelengthof2m
Thevelocityofthetrailerisfrom0120km/hr
Thetireonthetrailerremainsincontactwiththeroadatalltimes
-
8/8/2019 Project Two Report
5/43
DerivationofFreevibrationresponse
Asthereisalimitontheamountofinformationwehaveonthetraileranditsload,furtherresearch
and analysis was conducted to gain all the information that was
needed to describe the free
vibrationresponse.ThisinformationcanbeseenonthefreebodydiagraminappendixB.Itconsists
ofthecombinedspringconstants,Kofthetwoleafsprings,thedampeningsuppliedbythesystem
andthemassoftheloadtobecarried(theskidmountedenginepoweredaircompressor).
Equationoffreevibrationresponse;
(t)=0The weight of the trailer is known skid mounted engine,
research was conducted to establish a
suitable device to use with the trailer. It was found that
a___________ weighing approximately
500kgwasaviableoptionconsideringitssizeandmass.Thismeansthatthemassofthetrailerwill
varyfrom400kg(empty)to900kg(compressormounted).
Forthespringconstant,Kitwasagreedthatitshouldbedesignedforatraileratmaximumloadto
withstand the stressesapplied to the system.Hence,when
calculating the spring constant itwas
assumedthattheMwasthegrossweightofthetrailer,M=2000kg.Usingequation1.4(Hookslaw)
inappendixBandamaximumdisplacement/amplitudeof0.2mitwasfoundthatK=98000N/m.
Tofindthevalueofthedampeningconstant
itwasassumedthatthetrailerwasatfullcapacityas
that iswhen critical dampeningwillbemostdesirable.Therefore
thedampening constantof the
systemwasfound(usingequations1.1,1.2and1.3)tobe28000N.sec/m.
With all the values of the free body diagram found they can be
formed into an equation and
modelledinsimulinktobegraphedaccordingly.Thefreevibrationequationsandthegraphscanbe
foundinappendixBaswellasthesimulinkmodelinappendixF.
It is also is noted that from equation 1.1 the resonant
frequencies of the unloaded and loaded
trailersare15.65rad/secand10.43rad/sec.Therefore,withoutsufficientdampeninganyexcitation
forcewithsimilarfrequenciescouldpotentiallycauseresonancetooccur.
-
8/8/2019 Project Two Report
6/43
Forcedvibrationadditionandaffectonsystem
To analyse forced vibration on the system, a 500Kg internal
combustion compressor has been
mountedonto thebackof the trailer.Thecompressorconsistsof four
straightcylinders.The isa
mild imbalancewithintheenginewhich
isrepresentedbyaneccentricmasswithavalueof0.1Kg
andaneccentricityof0.1m.
Equationofthenewsystem
Where
sinTherefore
sinWiththevaluesforallthevariablesenteredintotheequation;
900 28000 98000 0.1
sinWhereisproportionaltotheenginespeed.Thisfunctionwasmodelledinsimulinkandgraphedoverasetperiodtoanalysetheresponseofthesystemtotheengine.ThesimulinkmodelcanbefoundinappendixFandthegraphsinappendixC.
Itcanbe seenby thegraphs inappendixC thatundercriticaldampening
theexcitation from the
engine causes little or no super positioning of the system at
all. However when the damping
constantisreducedtolessthancriticaltheeffectsbecomesmoreobservable.Thetransfersystemis
very apparent initially and with less damping can be observed
longer before a steady state is
achieved.
Itcanalsobeseenbythegraphsthatvaryingenginespeedsdoaffectthesystemduehoweverthey
onlybecome considerablearoundnof the system.Byuseofequation2.1,
thenondimensional
steady state canbe foundandmodelledagainst the ratioofengine
frequency, to the
systemsnaturalfrequency,.HencetheresonanceofthewholesystemcanbeanalysedasinappendixCtorevealwhatenginespeedcauseresonanceinthesuspensiontooccur.ThisallowstheRPMvalue
oftheenginewhichcausesresonancetobefound.
-
8/8/2019 Project Two Report
7/43
From the results found inappendixC, theengineonlybegins to
resonatewith the suspensionat
110RPM. The engine itself like any typical four cylinder
internal combustion system operates
between3006000RPMandhasan idlespeedof300
700RPMapproximately.Theonlytimewhen
theenginewillbeoperatingaround110RPMisduringtheignitionphasewhenitisatthatspeedfor
onlyaninstant.Thereforeevenwithoutthedampeningofthesuspensiontheenginewouldnotbe
abletoachieveresonanceintimetocauseanyseriousissues.
-
8/8/2019 Project Two Report
8/43
Roadforcedvibrationadditionandaffectonsystem
Tomodela trailerbeing towedacrossacorrugated roadbetween the
speedsof0120km/hr, the
abovesystemwillbeusedtoanalysethedisplacementofthewheelhubwithtime.
Thecorrugated
roadwillberepresentedbyasinewavewithawavelengthof5mandanamplitudeof0.1m.
The
vibrationsofthesystemisexcitedbythemotionofthesystemoverthecorrugations.
Thusknowing
thespringconstant,dampingcoefficientandfrequency(duetothetrailer'svelocity),agraphcanbe
plottedtodetermineresonancecharacteristics.
Thiscanbeachievedbyplottingthetransmissibility
factorVSFrequencyratio(ascanbeseeninAppendixD).
M
kc
V
-
8/8/2019 Project Two Report
9/43
Equationofmotion:
TheNonDimensionalsteadystatesolutionofthesystem
And
tan It can be seen from the graphs in appendix D, that when the
system is critically damped the
suspension response is very minimal. When critically damped the
trailer simply follows the
undulationsofthecorrugatedroad.
Howeverwhenthedampingconstantisloweredtheeffectsof
thecorrugatedroadbecomemuchmorenoticeable.
Withnodampingthemaximumdisplacement
spicksover0.15m(anadditional30%ofmovementcomparedtocritical).
-
8/8/2019 Project Two Report
10/43
Additionalnon-linearities
Whataresomepossiblenon-linearities ofthetrailer?
Nonlinearities can occur if the force exerted by the leaf spring
is a nonlinear function of thedisplacement.Areal lifeexampleofthis
is ifthewheelbecomesairbornor ifthespringbecomes
fullycompressed,whenreferringtoasuspensionsystemsuchasonthetrailer
itcanbesaidthat
thesuspensionhasbeenbottomedout.Oncethespringcannotcompressanymorenonlinearities
occurs.Asforifthetyrebecomesairbornthedisplacementofthespringovertimewouldnotbeina
linearform,duetothecharacteristicsandnatureofthekinematicequation.Inadditiontothisthe
spring could be stretched to yield by the means of the mass of
axel and wheel rims tyres etc.
Howeverinthisparticularmodelthiswasnotexamined.
Inamorecomplexmodel rather thanthespringhavingaconstantkvalue
itchangesthroughout
eachleafspring.ThiscanbeseeninthebelowFEAsimulations1
1Source:2002ABAQUSUsersConference
-
8/8/2019 Project Two Report
11/43
Simulinkmodelincludingnon -linearities
ThesimulinkmodelandinputvaluescanbefoundonAppendixF.Asitcanbeseenfromthebelowgraphthatinitialythemodelisoutofanacceptablerangewitha
peakat1.5mobviouslytheleafspringsshouldnottravelthesetypesofdistances.Howeveraftera
periodof time it settlesdown toabout100125mmwhichwould thenbe
inanacceptable range
beforebeingcompressed.Aftermuchtweakingofthemodelithasbecomeapparentthattherange
valueswhichareentered into themodelmustbe
furtherexamined.Although, itappearsthat the
modelisactuallysimulatingcorrectlyresultinginatrueresponseandoutput.Errorscanoccursuch
as identifying that the response is in metres and not in centre
metres and the range values are
correct.
-
8/8/2019 Project Two Report
12/43
Accelerometer
Anaccelerometer isan instrument thatmeasures
theaccelerationofavibratingbody.When the
natural frequency of the device is high compared to that of the
vibration to be measured, the
instrumentindicatesacceleration.
An accelerometer based on spring mass system has been designed
to measure the measure the
verticalmotionofthetrailer.Theconfigurationhasamaximumerrorof0.01%withinthefrequency
rangeof0to20Hz.
Model:
Specifications:
Mass,m=5grams
Springstiffness,k=4500N/m
Dampingcoefficient,c=6.64Nm/s
Dampingfactor=0.7
Assumptions:
Accelerometerisfirmlymountedonthechassisofthetrailer
Themaximumfrequencyoftheroadsurfacetobedrivenonis18Hz
m
k
x
a
m
k
x
a
-
8/8/2019 Project Two Report
13/43
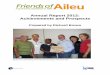
Theaccelerometerresponseisameasureofthemovementorvibrationofthedevice.Tocalculate
theaccelerometerresponse,thefollowingequationisused
Thegraphofresponseshowsthattheinstrumentisfunctionalatlowfrequencyandthusitisan
accelerometer.Infact,ifthemeasuredfrequenciesarehigherthatthenaturalfrequencyofthe
accelerometer,theamplituderesponsebecomesflat.
Theusefulrangeoftheaccelerometer,theaccelerometererror,canbecalculatedusingthe
equation
11 2
Theerror in theaccelerometer isnegligiblewithin the frequency
rangeof0 to20Hz.The reading
accuracydecreasesifthedeviceisusedoutsideofthisrange.Thegraphbelow,accelerationerrorvs
frequency with as a parameter, shows that 0.7 is an ideal
damping factor. In addition, = 0.7
extendstheusefulfrequencyrangeandalsopermitstogettheleastamplitudedistortion.
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
IZ/YI
/n
AccelerometerResponse
0
0.7
Damping
Factor
-
8/8/2019 Project Two Report
14/43
-
8/8/2019 Project Two Report
15/43
Reflection
-Realandidealisedmodels
TheImportance ofconsidering non-linearities
Nonlinearitiesofthesystemshouldbeconsideredtoincreasetheaccuracyofthesimulinkmodelso
thatitreasonblesthatofareallifesituation.
Byconsideringthenonlineraritesofthesystemcanalsopreventanddetectdesign
flaws for the
operation of the component or object. When modelling in simulink
the input and output is
determinedonthestructuringofthemodelasaresult
ifthemodeldoesntaccommodateforany
nonlineraties(onlyconsiderslinear)thesystemmaybecomeunstableinreallifewhichmaycausea
faultundercertainoperationalconditions,however
thecomputermodelmay reasonablea stable
outputresult.
Thekeypointwhencomparingrealandidealisedmodelsisyouonlygetwhatyouputin,forother
wordsifyouputincorrectvaluesintothesystemorthesimulinksystemisnotdesignforthoseinput
valuesobvisalyonlyincorrectsolutionswillbereturnedtotheoutput.
Sometimesitisnearimpossibletosimulatethereallifemodel,howevertheidealisedmodelmay
becloseenoughandbeintherangethatitdoesntmatterthateverysinglevariablehasbeentaken
into account. Such as for the trailer the leaf springs has been
modelled in ABAQUS and it was
discovered that for the leaf arrangement which would be very
simulink to the trailer that force
displacementissoclosetolinearitcanbeassumedtobelinear2,howeverthesystemwouldbeina
nonlinear formdependingon thedesired trend line.So this leaves
twooptions;make themodel
morecomplexandincludenonlinearitiesresultinginmorechancestomakeaprogrammingmistake
ortakethesecondoptionofjustusinglineararrangementwhichwouldbelessproblematicandgive
suchthesameoutputresultoftheotheroption.
Howeverthetruthis,ifyouhavetomakethemodelasrealisticaspossibletoreflectthebehaviour
ofthecomponentorobjectnonlinearitesmustbeconsidered.
-Differences/advantagesoffrequencydomainanalysis
Thedifferencebetween
frequencydomainanalysisandtimedomainanalysis includesthemethod
forgraphing thedata.Frequencydomainanalysisplotsthe frequency
ratioofagainstthenon
2RefertoAppendixIoutsourced2002ABAQUSUsersConference
-
8/8/2019 Project Two Report
16/43
dimensionalamplitudeMX,amtheresultinggraphwillshowthe
largeinfluencethatthedamping
hasoverthesystemwhennearresonance.Through
inspectionoffrequencydomainanalysisplots,
the inertia and damping forces can be observed to be large,
small, or balanced by other forces,
dependingonvaluesof .Whenthe
valueissmall,boththeinertiaanddampingforcesaresmall.Whenthevalueis1,
the larger inertia force is balanced by the spring force, and
the damping force is overcome by
impressedforces.Whenthevalueofislargertheimpressedforceisexpendedalmostentirelyin
overcomingthelargeinertiaforce.
There are some advantages to using time domain over frequency
domain analysis. It is easier to
identifyandfixproblemsorinconsistenciesinthedesign,andthroughtheuseofSimulinkitisalso
easiertocreateandefficientsystemandmakechangesinthedesignsoitsuitstheconditionsitwill
beappliedto.
The disadvantages include not being able to accurately reflect
on the physical properties of the
system, and relying on the skills and knowledge of the operator
using the Simulink program to
effectivelyapplythephysicalmodeltotheprogram.
-Briefinvestigationofthealternativemodellingapproachie.Rotational
movement
Thespringsoftheboxtrailerare
inthesimplestformofasingledegreefreedommodel.Theycan
eitherbemodelledmovingtranslationalongonedirection(vertically)orcanrotateaboutoneaxis
(rotationalmotion)whichwillbediscussedbrieflyshowingthedifference
inequationsandhow it
wouldaffecttheresonanceofthesprings.Theequationsbelowarethemost
importantequations
thatwereusedinthecompletionofourspringmodellingthereforetheycanbeviewedagainstone
another.
-
8/8/2019 Project Two Report
17/43
Vertical Motion Rotational Motion
Wn = 2 (Sqre root k/m)
(O) + c/m (O) + 4k/m (O)
Cc=c/4(sqrtrootk.m)
X=M(F0/K) (;)=M(M0/K0)
Resonanceofamechanicalsystemisthestateofthesysteminwhichanabnormallylargevibration
isproducedinresponsetoanexternalstimulus,occurringwhenthefrequencyofthestimulusisthe
same, or nearly the same, as the natural vibration frequency of
the system. The comparison of
resonance from theverticalmotion to thatof the rotationalmotion
canbeviewedbelowas the
responsetimesadifferent.
Verticalresonance
400 28000 98000 0 (unloaded)900 28000 98000 0
(loaded)Resonantfrequenciesoftheunloadedandloadedtrailersare15.65rad/secand
10.43rad/sec.
-
8/8/2019 Project Two Report
18/43
Rotationalresonance
400 28000 98000 0 (unloaded)
900 28000 98000 0 (loaded)
Resonantfrequenciesoftheunloadedandloadedtrailersare31.30rad/secand
20.85rad/sec.There isa larger time frameof resonancebetween
theunloadedand loaded trailer
when looking at the spring of thebox trailer from a rotational
motion view. The response times
differconsiderably,theloadedtrailerbeing10.4rad/secandtheunloadedtrailer15.65rad/sec.The
responsetimesaredoublethatoftheverticalmotiontimes
-
8/8/2019 Project Two Report
19/43
Appendix -A - Listofgiveninformation
Specifications
Type: ElCheapo
Mass:(Tare) 400kg
Mass:(Gross) 2000kg
ChassisDimensions:
Overalllength: 3600mm
OverallWidth: 1700mm
OverallHeight: 800mm
BoxLength: 2100mm
Boxwidth: 1200mm
Boxheight: 400mm
Axleposition: 1100mmfromthefrontofthetrailer
Tyres: 185mmx355mm(Rimdiameter)
-
8/8/2019 Project Two Report
20/43
Appendix -BFreevibrationmodellingandfreebodydiagrams
Layoutanddimensionsofthetrailer
Freebodydiagram Functionaldiagram
-
8/8/2019 Project Two Report
21/43
Equationsusedtoderivethemodellingequation
Equation1.1 Equation1.2 2Equation1.3 = 1Critical)Equation1.4
Hookslaw,
Fromdiagram,thefollowingequationcanbeformed;
0Usingtheinformationfound,theequationfortheunloadedtraileris;
400 28000 98000 0andfortheloadedtraileris;
900 28000 98000 0Thegraphson the followingpagehavebeenmade
toshowwhat theequation representsand to
display it in different situations primarily focusing on
different values of C. They show the
displacement of the trailers axle in metres (centre point of the
wheel) with respect to time in
seconds.
Note:Theempty (M=400kg)and loaded (M=900kg)systemswere inputted
intosimulinkhowever
theonlynotable changedetectedwas inamplitudewhere the loaded
system rangedhigherbya
verysmallamount.Withthissmalldifferencedetectedallfurtheranalysiswillbeconductedwiththe
loadedtrailerduetothevariationbeingfoundinthisinitialtest.
-
8/8/2019 Project Two Report
22/43
Unloaded Loaded
Underdampened Criticaldampening
NoDampening OverDamped
Theeffectsofdifferentdampingvaluesonthesystemcanbeobserved.
-
8/8/2019 Project Two Report
23/43
Appendix -CForcedvibration,unbalancedengine
Diagramofengineaffectingthetrailer
Equationsusedintheanalysis
Equation2.1,frompage54ofTheoryofvibrationwithapplications5thedition,
1 2
Wherethedampingratioisrepresentedby .
Equationofsystemwhenloaded;
sin sin900 28000 98000 0.1 sin sin FortheLaplacetransform;
LetX(s)=x,Therefore;
Forthetransferfunction;
-
8/8/2019 Project Two Report
24/43
Simulinkgraphsdisplayingdampeningandenginespeedeffectsonthesystem
Nodampingwithforceatresonancefrequency
Forcedvibrationwithcriticaldampingresonancefrequency
Forcedvibrationwithverylittledampingatresonancefrequency
Littledampingwithengineat3000RPM
-
8/8/2019 Project Two Report
25/43
Littleafterresonantfrequencywithlittledamping
Littlebeforeresonantfrequencywithlittledamping
Plotsofforcedvibrationwithrotatingunbalance(dampingconstant=(1/2.8)
Fromabove itcanbe seen thatat resonance the frequency ratio
isabout1.1.Considering thata
systemwithnodampingwouldhavearatioof1,theeffectofthedamping
issomewhatevident.
Withoutsuchafunctionthetrailerssuspensionwouldreachresonanceataratioof1causinglarge
excitationofthesystempotentiallydamagingthetrailer.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 2 4 6 8 10 12
MX/me
w/wn
MX/meVsw/wn
-
8/8/2019 Project Two Report
26/43
Dampeningfactorof1,hencecriticaldampening
Inthisgraphthesystemisatcriticaldampeningwhichmakesdetermininganapproximatepointof
resonancefromitimpossible.Thisistheperfectsettingforthetrailerasthedampeningnullifiesa
largeamountofimpactandstopedthesystemfromresonating.
FromThefirstgraphofMX/meVs
thefrequencyratiowasdeterminedtobeatapproximately1.1whenthesystemtentedtowardsresonance.Fromthistheenginespeedcanbedeterminedand
accommodatedfor.
=1.1,Were
10.43rad/sec
from equation 1.1
WhereM=massofentiresystem=900Kg(notethemassoftheentiresystemandnottheeccentric
masswastaken)
K=98000N/m
and C=10000
Therefore=11.48rad/secand109.61RPM
-
8/8/2019 Project Two Report
27/43
Fromthisitcanbesaidthatforasystemdampedpartially,theenginewillstarttoresonatewiththe
suspensionat100
110RPM.Tostopthisfromhappening,thetrailerhasbeendampedsufficiently
asinthesecondgraphwhereitcanbeseenastheengineapproachesapproximately110RPM(value
changeswithadifferentC)resonanceisnotexistent.
A smallobservation thatwasmadewas that the resonance frequency
increaseswithdampening.
Withnodampeningthesystemreachesresonanceat100RPM,withC=10000thesystemresonates
at110RPMasabove.
-
8/8/2019 Project Two Report
28/43
Appendix -DRoadsurfacevibration
NoDampening
Underdamped
-
8/8/2019 Project Two Report
29/43
Critical
-
8/8/2019 Project Two Report
30/43
SimulinkModel:RoadSurfaceinducedVibration
-
8/8/2019 Project Two Report
31/43
ResonanceInductedbyRoad
Knowing the spring constant, damping coefficient and frequency
(due to the trailer's velocity), a
graphcanbeplottedtodetermineresonancecharacteristics.
Thiscanbeachievedbyplottingthe
transmissibilityfactorVSFrequencyratioascanbeseenbelow.
SpringConstantof28000Ns/m(criticaldamping)
At 28 000Ns/m the system is critically damped and doesn't allow
the system to resonate at any
speed.
Thisiswhythisdampeningconstantwaschosenforthedampenerinourtrailerbecause
it
wouldpreventanyunexpectedresonancethatcouldmakethetrailerbounceviolentlyovertheroad
under the right conditions. Yet thedampener is still softenough
toabsorbany impactand then
returntothesystemstoitsnaturalposition.
ResonanceInducedbyRoad
-
8/8/2019 Project Two Report
32/43
SpringConstantof15000Ns/m(underdamped)
Forillustrativepurposes,itcanseenthatwithareduceddampingconstantof15000Ns/mresonance
occurswhenthefrequencyratio isapproximately0.8.
Asthedampingconstantapproaches0,the
frequency ratio at which resonance will occur will approach 1.
(with no damping resonance will
occurat1.)Thespeedatwhichresonancewilloccurcanthenbecalculated.
0.8 7rad/sfromequaton1.1
0.8x7
5.6/FindFrequency
2 2
0.89
0.000
0.200
0.400
0.600
0.800
1.000
1.200
1.400
1.600
1.800
0.
00
0.
10
0.
20
0.
30
0.
40
0.50
0.
60
0.70
0.
80
0.
90
1.
00
1.
10
1.
20
1.
30
1.
40
1.50
1.
60
1.70
1.
80
1.
89
1.
99
2.
09
2.
19
2.
29
2.
39
2.
49
TransmissibilityX/y
TransmissibilityVSFrequencyRatioResonanceInducedbyRoad
-
8/8/2019 Project Two Report
33/43
FindVelocity
0.89x5 4.45/
16/Thereforeat16km/hrandadampingconstantof15000Ns/mthetrailerwillbeatresonance.
MagnificationFactor
Themagnificationfactorisanondimensionalexpressionfortheamplitudeofoscillation.
Thisis
determinedfrom:
11 2
0
0.2
0.4
0.6
0.8
1
1.2
0.00 0.20 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80 1.99 2.19
2.39
MagnificationFactor
MagnificationFactorVsFrequencyRatio
15000Ns/m
28000Ns/m
-
8/8/2019 Project Two Report
34/43
Itcanbeseenfromthegraphabovethatwithadampingconstantsof15000Ns/mtheamplitudeof
oscillationisalwaysgreaterthanthatofthechosendamperof28000Ns/m.
Onceagainthisiswhya
dampingconstantof28000Ns/mwasusedtodampenthetrailersdisplacement.
DerivingtheTransferFunction
Equationofmotion
LaplaceIntegralTransform
ThereforeTransferFunction
Matlabcannowusedtographabodeplotforthesystem.
-
8/8/2019 Project Two Report
35/43
BodePlot:RoadInductedVibrations
-
8/8/2019 Project Two Report
36/43
The above bode plot shows that at very low frequencies and
frequencies just below 10 the
suspensionresponseofthetrailerisminimal.Aroundafrequencyratioof10thesuspensionsystem
isshowntobe
inaccurate.Afterthispointthefrequencyoftheroadsurfacebecomessohighthat
the trailer feels little impact from the roads surface. This
isbecause the trailer wheel no longer
followstheprofileoftheroad'ssurfaceandliftoffoccurs.
MatlabCode
num=[2800098000]
den=[20002800098000]
sys=tf(num,den)
bode(sys)
margin(sys)
-
8/8/2019 Project Two Report
37/43
Appendix -FSimulinkdiagramsusedinproject
Freevibrationresponse
Engineforcedvibration
-
8/8/2019 Project Two Report
38/43
Non-linearities
-
8/8/2019 Project Two Report
39/43
-
8/8/2019 Project Two Report
40/43
-
8/8/2019 Project Two Report
41/43
Appendix -HExtraResonancecalculation
EXTRA Eccentricmassusedforengine
UsingthesameworkingasappendixCandthecriticaldampeningconstantof28000,
n=989.95rad/sec
Fromthegraph,resonanceisapproachedatapprox1.1.
Thereforew=1088.94rad/sec=10398.65RPM.
The RPM value for the eccentric mass to reach resonance with the
dampener and spring of the
trailerwasfoundtobe10400RPM.WhichliketheappendixCresultsisalsooutsideoftheoperating
rangeoftheengine.
0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
MX/me
w/wn
MX/meVsw/wn
-
8/8/2019 Project Two Report
42/43
Appendix -IForceVsDisplacement:LeafSpring
-
8/8/2019 Project Two Report
43/43
References
WilliamT.Thomson&MarieDillonDahleh,Theoryofvibrationwithapplications5thEdition,PrenticeHall,UppersaddleriverNJ,published1998
CharlesM.Close,DeanKFrederick,JonathanC.Newell,ModellingandAnalysisoddynamicsystems3
rdEdition,JohnWiley&SonsInc.published2002
WelcometoVibrationDataLaplaceTransformTable,TomIrvine,VibrationData(searchengineandtutorialsite),viewed31/07/09
http://www.vibrationdata.com/Laplace.htm
Gillespie,T.D.,FundamentalsofVehicleDynamics,SocietyofAutomotiveEngineers,Inc,
1992.
Liu,W.,NonlinearAnalysisTheoryofSingleLeafSteelSprings,SAEPaper881744,1988.
SAE,ManualonDesignandApplicationofLeafSpring,SAEHS788,APR80.
SAE,SpringDesignManual,SAEAE21,1996
SAEStandard,LeafSpringsforMotorVehicleSuspensionMadetoCustomaryU.S.Units
SAE
J510NOV92,SAEHandbook,Vol.2,p20.09,1998.
Tavakkoli,S,Aslani,F.,andRohweder,D,AnalyticalPredictionofLeafSpringBushingLoads
UsingMSC/NASTRANandMDI/ADAMS,MSCWorldUsersConference,1996.
Wachtel,D.W.,Adkins,D.E.,May,J.M.,andHohnstadt,W.E.,AdvancesintheDesign,
Analysis,andManufacturingofSteelLeafSprings,SAEPaper872256,1987.