Embed Size (px)
Citation preview

Kingston Lane, Uxbridge
Middlesex UB8 3PH
1
PROJECT REPORT ON:
Local Inertia; Understanding the impact of the distribution of inertial response Document ID: First Phase, Step 2, Deliverable D2.1, “Mathematical formulation of the local inertia phenomenon based on observations from Step 1” Prepared For:
Elia (Project Sponsor), Belgian transmission system operator, Brussels, Belgium
Prepared By: Bahman Alinezhad Osbouei, Post-Doctoral Research Fellow, Brunel University London Under The Guidance of: Prof. Gareth Taylor and Dr. Ioana Pisica College of Engineering, Design and Physical Sciences; Brunel University London Contacts: Prof. Gareth Taylor +44 (0) 1895 266610 [email protected] Dr. Bahman Alinezhad Osbouei +44 (0) 1895 265735 [email protected]
Records: Version Date Status Comments Signature
1 12-11-2018 Initial-Draft Revised and completed based on the comments from Elia B. Alinezhad
2 26-11-2018 Draft Revised and completed based on the comments from Elia B. Alinezhad
3 02-04-2019 Final Adding introduction and conclusion B. Alinezhad
4 24-04-2019 Final B. Alinezhad

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
2
Contents Contents ............................................................................................................................................................ 2
Introduction ....................................................................................................................................................... 3
1. Effect of local inertia on local frequency and RoCoF ................................................................................. 4
Rotor swings in the generators ......................................................................................................... 4
Stage I: Rotor swing in the generators and local RoCoF .................................................................... 4
Stage II: Frequency drop (a few seconds to several seconds) ........................................................... 7
Inertia assessment of a three-area power system as a matter of local RoCoF criteria (network) .... 9
Numerical example .......................................................................................................................... 12
1. Effect of inertia distribution on small signal stability .............................................................................. 16
2.1. Effect of inertia distribution on system modes .................................................................................... 16
2.1.1. Modal analysis ............................................................................................................................... 16
2.1.2. Two-area power system ................................................................................................................ 17
2.1.3. Pole and zero change .................................................................................................................... 20
2.2. Stability assessment of three-area power system ............................................................................... 22
2. Transient/Rotor-angle Stability ............................................................................................................... 27
3.1. Direct method of transient stability analysis ........................................................................................ 27
3.1.1. Description of the transient energy function approach ................................................................ 27
3.1.2. Analysis of a practical power system ............................................................................................. 28
3.2. Effect of inertia constant on a single machine infinite bus network ................................................... 30
3.3. Stability assessment of a three machine system based on inertia distribution ................................... 32
3. Conclusion ............................................................................................................................................... 34
4. References ............................................................................................................................................... 35

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
3
Introduction
In Step 1, the impact of inertia distribution (local inertia) on system stability investigated and categorized into
three main issues as local RoCoF, small signal stability and transient stability. However, these effects
concluded from an extensive simulations based on real and specific test cases of GB power system reduced
model, but a detailed mathematical and theoretical analysis are also required to understand and formulate
the effect of local inertia phenomenon with more details. This approach will also help us in the future as a
basis to discover the effect of various parameters (for instance RES penetration, load inertia, generation
inertia, and number of committed synchronous generators) on how the inertia distribution affects power
system stability. This report tries to generate a clearer mathematical and analytical understanding of local
inertia based on the observed phenomena and experiences targeted in Step 1. Firstly, a simplified and
standard model is adopted and then the effect of inertia distribution will be studied by the mathematical
formulation of the problem. This formulation is such that it can be easily extended for a larger or more
complicated network. In the analysis of local RoCoF, which is based on the inertia distribution and electrical
distance, the method describes the dependence of system local RoCoF from a generation loss in the system
to the inertia distribution. In small signal stability, the effect of inertia distribution is studied in terms of
locational changes of system poles and zeros, which resulted in risky power oscillations in tie lines and
generators rotor angles. Finally, in transient stability, the problem formulated based on direct methods and
transient potential energy approach that demonstrates the dependence of system transient stability to the
inertia distribution. In each case, it is attempted to compare the results of the mathematical calculations with
simulation results with Power-Factory that in most cases they are almost similar. These formulations will
form the basis of a tutorial or seminar discussion of the physical and theoretical fundamentals of how inertia
distribution affects power system stability and used for developing a criteria to assess and measure these
effects.

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
4
1. Effect of local inertia on local frequency and RoCoF Rotor swings in the generators
The response of a power system to a power imbalance, for example by the tripping of a generating unit, can
be divided into four stages depending on the duration of the dynamics involved:
Stage I Rotor swings in the generators (fraction of a second)
Stage II Frequency drop (fraction of a second to several seconds)
Stage III Primary control by the turbine governing systems (several seconds)
Stage IV Secondary control by the central regulators (several seconds to minutes).
The inertial response associated with the system rotational masses or system virtual inertia typically related
to the stages I and II above. These stages will be described in the following sections.
Stage I: Rotor swing in the generators and local RoCoF To begin the discussion the power system shown schematically in Figure 1a will be considered where a power
station transmits its power to the system via two parallel transmission lines. The power station itself is
assumed to consist of two identical generating units operating onto the same bus-bar. The disturbance
considered will be the disconnection of one of the generating units. In stage I of the disturbance the way in
which the remaining generating unit contributes to the production of the lost power will be given special
attention [1].
The sudden disconnection of one of the generators will initially produce large rotor swings in the remaining
generating unit and much smaller rotor swings in the other generators within the system. For simplicity,
these small oscillations will be neglected to allow the rest of the system to be replaced by an infinite bus. The
time scale of the rotor swings is such that the generator transient model applies and the mechanical power
supplied by the turbine remains constant. To simplify considerations, the classical model representation of
the generator will be used, i.e. a voltage source in series with machine transient reactance. Figure 1b shows
the equivalent pre-disturbance circuit diagram for the system.
As both generators are identical, they can be represented by the same transient emf, 𝐸′ behind an equivalent
reactance that combines the generator transient reactance 𝑋𝑑′ , the transformer reactance 𝑋𝑇 and the system
reactance 𝑋𝑠.
Figure 2 shows how the equal area criterion can be applied to this problem. In this diagram 𝑃−(𝛿′) and 𝑃+(𝛿
′)
are the transient power–angle characteristics, and 𝑃𝑚− and 𝑃𝑚+ the mechanical powers, before and after
the disturbance occurs. Initially the plant operates at point 1 and the equivalent power angle with respect to
the infinite bus-bar is 𝛿0′ . Disconnection of one of the generators has two effects. Firstly, the equivalent
reactance of the system increases so that the amplitude of the power–angle characteristic decreases.
Consequently the pre- and post-disturbance power–angle characteristics are:
𝑃−(𝛿0′) =
𝐸′𝑉𝑠𝑋𝑑′ + 𝑋𝑇2 + 𝑋𝑠
𝑠𝑖𝑛𝛿0′
𝑃+(𝛿0′) =
𝐸′𝑉𝑠𝑋𝑑′ + 𝑋𝑇 + 𝑋𝑠
𝑠𝑖𝑛𝛿0′
(1-1)

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
5
Secondly, the mechanical power delivered to the system drops by an amount equal to the power of the lost
unit, that is 𝑃𝑚+ = 0.5𝑃𝑚−.
Figure 1 Parallel generating units operating onto an infinite bus-bar: (a) Schematic diagram; (b) Equivalent circuit.
Figure 2 Application of the equal area criterion to determine the first stage of the dynamics. Duration of the phenomena – first few seconds
As the rotor angle of the remaining generator cannot change immediately after the disturbance occurs, the
electrical power of the generator is greater than the mechanical power delivered by its prime mover, point
2.
The rotor is decelerated and loses kinetic energy corresponding to the area 2–2’–4. Due to its momentum,
the rotor continues to decrease its angle past point 4 until it stops at point 3 when the area 4–3–3’ equals

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
6
the area 2–2’–4. The damping torques then damp out subsequent oscillations and the rotor tends towards
its equilibrium point 4.
The amplitude of the rotor oscillations of any given generator will depend on the amount of lost generation
it picks up immediately after the disturbance occurs. Using the notation of Figure 2 gives:
∆𝑃0 = 𝑃−(𝛿0′) − 𝑃𝑚+ = 𝑃𝑚− − 𝑃𝑚+
∆𝑃𝑟𝐼 = 𝑃+(𝛿0′) − 𝑃𝑚+
∆𝑃𝑠𝐼 = ∆𝑃0 − ∆𝑃𝑟𝐼
(1-2)
where ∆𝑃0 is the lost generating power and ∆𝑃𝑟𝐼 and ∆𝑃𝑠𝐼 are the contributions of the generating units
remaining in operation and of the system, respectively, in meeting the power imbalance ∆𝑃0 at the very
beginning of the disturbance. The subscript ‘ I ’ indicates that these equations apply to Stage I of the
disturbance. Using the first of the equations in (1-2), a formula for ∆𝑃𝑟𝐼 can be rewritten as:
∆𝑃𝑟𝐼 = 𝑃+(𝛿0′) − 𝑃𝑚+ = [𝑃+(𝛿0
′) − 𝑃𝑚+]1
𝑃−(𝛿0′) − 𝑃𝑚+
∆𝑃0 (1-3)
Substituting (1-1) into (1-3) and noting that 𝑃𝑚+ = 0.5𝑃𝑚− gives,
∆𝑃𝑟𝐼 =𝑋𝑠
𝑋𝑑′ + 𝑋𝑇 + 𝑋𝑆
∆𝑃0 =1
1 + 𝛽∆𝑃0 (1-4)
where 𝛽 = (𝑋𝑑′ + 𝑋𝑇)/𝑋𝑠. The amount that the system contributes in order to meet the lost generation can
now be calculated as:
∆𝑃𝑠𝐼 = ∆𝑃0 − ∆𝑃𝑟𝐼 =𝑋𝑑′ + 𝑋𝑇
𝑋𝑑′ + 𝑋𝑇 + 𝑋𝑆
∆𝑃0 =𝛽
1 + 𝛽∆𝑃0 (1-5)
with the ratio of the contributions (1-4) and (1-5) being
∆𝑃𝑟𝐼∆𝑃𝑠𝐼
=1
𝛽=
𝑋𝑠𝑋𝑑′ + 𝑋𝑇
(1-6)
This equation shows that, the contribution of the unit remaining in operation in meeting the lost power is
proportional to the system equivalent reactance 𝑋𝑠. Both contributions ∆𝑃𝑟 and ∆𝑃𝑠 are depicted in Figure 2.
Due to the fact that the inertia of the unit is much smaller than that of the power system, the generator
quickly decelerates, loses its kinetic energy and both its rotor angle and generated power decrease (Figure
2b). Consequently, the power imbalance starts to increase and is met by the system that starts to increase
its contribution ∆𝑃𝑠. This power delivered by the system has been shaded in Figure 2 and, when added to the
generator’s share 𝑃𝑟(𝑡), must equal the load existing before the disturbance. As can be seen from this figure,
the proportion of lost generation picked up by the system changes with time so that the system contributes
more and more as time progresses.

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
7
Although the formula in Equation (1-6) has been derived for two parallel generating units operating in the
system, a similar expression can be derived for the general multi-machine case. This expression would lead
to a conclusion that is similar to the two-machine case in that at the beginning of Stage I of the dynamics the
share of any given generator in meeting the lost load will depend on its electrical distance from the
disturbance (coefficient 𝛽). In the case of Figure 1 the imbalance appeared at the power plant bus-bar.
Thus, 𝑋𝑠 is a measure of the electrical distance of the system from the disturbance and 𝑋𝑑′ + 𝑋𝑇 is a measure
of the electrical distance of the unit remaining in operation, or local units in the region.
If the primary mechanical power remains constant, from the swing equation:
∆𝑃 = 2𝐻𝑑𝜔𝑚
𝑝𝑢
𝑑𝑡=2𝐻
𝑓0×𝑑𝑓
𝑑𝑡 (1-7)
where H is the generator inertia constant, 𝜔𝑚 the pu mechanical speed and 𝑑𝑓/𝑑𝑡 is the local frequency
deviation (in Hz) at the generator terminal that can be interpreted as the local RoCoF. By substituting the (1-
7) in (1-6) and considering the local inertia as 𝐻𝑟 and system inertia as 𝐻𝑠 it changes into [2]:
𝑑𝑓𝑟𝑑𝑡
=𝐻𝑠𝐻𝑟×
𝑋𝑠𝑋𝑑′ + 𝑋𝑇
×𝑑𝑓𝑠𝑑𝑡
(1-8)
Equation (1-8) reveals two important facts about the response of the system following a disturbance;
(a) The dependency of the magnitude of the local RoCoF on the inertia distribution in the system. For
greater local inertia, a smaller RoCoF will be observed after a local disturbance and vice versa and,
(b) If the system inertia is much greater than the local inertia (𝐻𝑠 ≫ 𝐻𝑟), the greater the electrical
distance from the system, the greater the local RoCoF will be in the case of a local generation loss.
Equation (1-8) is only valid at the instant when the frequency starts to fall. It shows that the local RoCoF
(close to the generator that has been disconnected) will have a higher value than that further away, and it
demonstrates the relationship of the magnitude of the local RoCoF to the inertia distribution. This effect will
be investigated further by simulating a similar case in the Power-Factory.
Stage II: Frequency drop (a few seconds to several seconds) The situation shown in Figure 2 can only last for a few seconds before the power imbalance causes all the
generators in the system to slow down and the system frequency to drop. Thus begins Stage II of the
dynamics. During this stage, the share of any one generator in meeting the power imbalance depends solely
on its inertia and not on its electrical distance from the disturbance. Assuming that all the generators remain
in synchronism, they will slow down at approximately the same rate after a few rotor swings in Stage I of the
dynamics. This may be written as:
𝑑∆𝜔1𝑑𝑡
≈𝑑∆𝜔2𝑑𝑡
≈ ⋯ ≈𝑑∆𝜔𝑁𝐺𝑑𝑡
= 휀 (1-9)
where ∆𝜔𝑖 is the speed deviation of the 𝑖th generator, 휀 is the average acceleration and 𝑁𝐺 is the number
of generators.
According to the swing equation, Equation (1-7), the derivative of the speed deviation can be replaced by the
ratio of the accelerating power ∆𝑃𝑖 of the 𝑖th unit over the inertia constant 𝐻𝑖. This modifies Equation (1-9)
to

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
8
∆𝑃1𝐻1
≈∆𝑃2𝐻2
≈ ⋯ ≈∆𝑃𝑁𝐻𝑁
= 휀 (1-10)
If the change in the system load due to the frequency change is neglected, then the sum of the extra load
taken by each generator must be equal to the power lost ∆𝑃0 as
∆𝑃0 = ∑ ∆𝑃𝑖
𝑁𝐺
𝑁=1
(1-11)
Substituting the increment ∆𝑃𝑖 in this equation with ∆𝑃𝑖 = 𝐻1휀 gives
∆𝑃0 = 휀∑ 𝐻𝑖
𝑁𝐺
𝑁=1
or 휀 =∆𝑃0
∑ 𝐻𝑖𝑁𝐺𝑁=1
so that ∆𝑃𝑖 = 𝐻𝑖휀 =𝑀𝑖
∑ 𝐻𝐾𝑁𝐺𝑘=1
∆𝑃0 (1-12)
This equation determines the contribution of the 𝑖th generator in meeting the lost power in Stage II of the
dynamics when each generator contributes an amount of power proportional to its inertia. In this stage, the
contribution of the generator remaining in operation and the rest of the power system in meeting the lost
power can be expressed, using (1-12), as
∆𝑃𝑟𝐼𝐼 =𝐻𝑟
𝐻𝑟 +𝐻𝑠∆𝑃0 and ∆𝑃𝑠𝐼𝐼 =
𝐻𝑠𝐻𝑟 +𝐻𝑠
∆𝑃0 (1-13)
In a similar way as in Equation (1-8), the ratio of the contributions is
∆𝑃𝑟𝐼𝐼 =𝐻𝑟𝐻𝑠∆𝑃𝑠𝐼𝐼 (1-14)
and is equal to the ratio of the inertia coefficients of local generation and remote (system) generation. In
network with 𝐻𝑠 ≫ 𝐻𝑟 (local lack of inertia), the contribution by the generator remaining in operation in
covering the lost power is very small. The assumption made when preparing Figure 2 was that ∆𝑃𝑟𝐼𝐼 ≈ ∆𝑃0 ×
𝐻𝑟/𝐻𝑠 ≈ 0.
Figure 3a illustrates the case when the system has a finite equivalent inertia and the rotor angle of both the
remaining generator and the system equivalent generator decreases as the frequency drops. The initial rotor
angle oscillations are the same as those shown for the first stage of the dynamics in Figure 2. The angles then
decrease together as the generators operate synchronously. Figure 3b shows the case of a three-generator
system where the load at node 4 suddenly increases. Generators 1 and 2 are close to the disturbance, so they
participate more strongly in the first stage of the oscillations than generator 3. During the second stage, the
power angles synchronously decrease and the system frequency drops.

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
9
Figure 3 Examples of changes in the rotor angles in the case of a real power disturbance: (a) disconnection of
generator 2; (b) sudden increase of the load at node 4. The duration of Stage II is a few to several seconds.
Inertia assessment of a three-area power system as a matter of local RoCoF criteria (network)
According to the previous section, the changes in local frequency and RoCoF is a function of inertia
distribution and electrical distance, which the latter is a parameter of AC tie-lines and length. In this section,
the stage I frequency response of a three-area power system in case of different inertia distribution is studied.
Suppose, the IEEE 9-bus test system, and Area 3 as the local inertia area as depicted in Figure 4 and its
Thevenin equivalent from bus-3 in Figure 5. The original 3-area system is slightly modified in the generation
at bus-3, where a new unit 𝐸4, is added to this point similar to the existing one. The internal impedances of
units as well as transformers short circuit impedances were considered for all units but only is shown for
those that are connected to the bus-3.
Figure 4 Modified 3-area system to study the effect of local inertia on RoCoF

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
10
Figure 5 Thevenin equivalent of system shown in Figure 4 from bus-3
For this network, the system Thevenin reactance from bus-3, can be calculated from system impedance
matrix as,
𝑋𝑡ℎ𝑏3 = 𝑍𝐵𝑈𝑆
33 (1-15)
and 𝐸𝑡ℎ can be calculated from open circuit voltage at bus-3. Applying the Equation (1-6) to the Figure 5, and
disconnecting one of the generators in area 3, e.g. 𝐸4 results in,
∆𝑃31∆𝑃𝑠
=1
𝛽=
𝑋𝑡ℎ𝑏3
𝑋𝑑′ + 𝑋𝑡
∆𝑃𝑠 = ∆𝑃1 + ∆𝑃2
(1-16)
For finding the contribution of areas 1 and 2 in the ∆𝑃𝑠, the Equation (1-6) is implemented again. Since, each
area contribution is in accordance with its electrical distance to the bus-3 therefore, before applying the
Equation (1-6), it is convenient to convert the model shown in Figure 4 into radial configuration network. In
such a network, each area connecting to the bus-3 with its electrical distance impedance as shown in Figure
61.
1 Reader should note that the existing branch between Area 1 and Area 2 is eliminated in the converted model, changing it from a meshed configuration into a radial configuration.

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
11
Figure 6 Converted model with electrical distance impedances
Where 𝑋13𝑒 and 𝑋23
𝑒 are the electrical distance of areas 1 and 2 relative to the area 3 respectively. Finding
these quantities can be performed with some methods [9]. In this study, we introduce two main methods as
follows.
a) Thevenin Impedance Distance: Consider first an intuitive measure, where the distance between two
nodes is the equivalent Thevenin impedance between them, being the parallel combination of all
impedance paths connecting them. Usefully, this can be calculated directly from the system’s ZBUS
matrix, which is simply the matrix inverse of the system’s YBUS matrix. The relevant calculation using
this method is as follows [10]:
𝑍𝑖𝑗𝑡ℎ𝑒𝑣 = 𝑍𝑖𝑖 + 𝑍𝑗𝑗 − 2𝑍𝑖𝑗 (1-17)
In (1-17), it is assumed that 𝑍𝑖𝑗 = 𝑍𝑗𝑖 which is common for prevalent networks without active
component. In transmission systems, branches are assumed to have a high X/R ratio, permitting
application of the DC power flow approximations. Under these assumptions, the |𝑍𝑖𝑗𝑡ℎ𝑒𝑣| distance
predicts the change in voltage angle required to transmit a unit of active power from bus 𝑖, for
reception at 𝑗, holding all other system quantities constant. With this concept, the next method will
be developed as,
b) Jocobian Distance: The solution of the load flow problem yields a useful matrix of power flow
sensitivities, i.e., the Jacobian, as follows [11]:
[∆𝑃∆𝑄] = 𝐽 [
∆𝜃∆𝑉] (1-18)
where,
𝐽 = [𝐽𝑃𝜃 𝐽𝑃𝑉𝐽𝑄𝜃 𝐽𝑄𝑉
] = [
𝜕𝑃
𝜕𝜃
𝜕𝑃
𝜕𝑉𝜕𝑄
𝜕𝜃
𝜕𝑄
𝜕𝑉
] (1-19)

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
12
Under the DC power flow assumption (∆𝑉 = 0), 𝐽𝑃𝜃 is the susceptance matrix 𝑩 = 𝑖𝑚𝑎𝑔(𝒀𝑩𝑼𝑺). By
considering the concept of |𝑍𝑖𝑗𝑡ℎ𝑒𝑣| distance and let 𝐽𝑃𝜃
−1 be the pseudo-inverse of 𝐽𝑃𝜃 , then each
element 𝑋𝑖𝑗 of the electrical reactance distance matrix can be,
[
∆𝜃𝑖⋮∆𝜃𝑗⋮
] =
[ 𝐽𝑃𝜃𝑖𝑖 … 𝐽𝑃𝜃
𝑖𝑗…
⋮ ⋱ ⋮ ⋮
𝐽𝑃𝜃𝑗𝑖
… 𝐽𝑃𝜃𝑗𝑗
⋮
⋮ … … ⋱] −1
[
∆𝑃𝑖⋮∆𝑃𝑗⋮
]
∆𝜃𝑖 = (𝐽𝑃𝜃−1)
𝑖𝑖∆𝑃𝑖 + (𝐽𝑃𝜃
−1)𝑖𝑗∆𝑃𝑗
∆𝜃𝑗 = (𝐽𝑃𝜃−1)
𝑗𝑖∆𝑃𝑖 + (𝐽𝑃𝜃
−1)𝑗𝑗∆𝑃𝑗
(1-20)
Note that in (1-20), ∆𝑃𝑖 = −∆𝑃𝑗 = 1 𝑝𝑢, hence,
∆𝜃𝑖 − ∆𝜃𝑗 = (𝐽𝑃𝜃−1)
𝑖𝑖− (𝐽𝑃𝜃
−1)𝑗𝑖− (𝐽𝑃𝜃
−1)𝑖𝑗+ (𝐽𝑃𝜃
−1)𝑗𝑗
(1-21)
Which is in coincide with the Thevenin concept.
Backing to Figure 6, and applying the Equation (1-6) gives,
∆𝑃1∆𝑃𝑠 − ∆𝑃1
=(𝑋𝑡ℎ
𝑏3⊝𝑋13𝑒 )
𝑋13𝑒 = 𝜒1
∆𝑃1 =𝜒1
1 + 𝜒1∆𝑃𝑠 =
𝜒11 + 𝜒1
×𝛽
1 + 𝛽∆𝑃0
(1-22)
where (𝑋𝑡ℎ𝑏3⊝𝑋13
𝑒 ) refers to the Thevenin equivalent impedance from bus-3 without considering the 𝑋13𝑒 ,
herein for the 3-area system, (𝑋𝑡ℎ𝑏3⊝𝑋13
𝑒 ) = 𝑋23𝑒 . By this method, the contribution of each area to the power
loss in area 3 will be calculated and obtained. This a general method and can be applied to any power system
with generic size and complexity.
As discussed before, in the stage I, this contribution is a function of electrical distance and when this quantity
is specified, the frequency and RoCoF response of each area can be obtained from (1-7) and (1-8). In the next
section, a criterion will be presented for the minimum area inertia to have maximum RoCoF.
Numerical example For the system shown in Figure 4, suppose 𝑋𝑑
′ = 0.2, 𝑋𝑡 = 0.144, 𝑋13 = 0.66, 𝑋23 = 0.44 and 𝑋12 = 0.61 all
in pu value on a 230kV and 250MVA base. The 𝑌𝐵𝑈𝑆⊝3
matrix for this system is1,
𝑌𝐵𝑈𝑆⊝3 = 𝑗 [
−6.0615 1.6393 1.51521.6393 −6.8190 2.2727
1.51521.52 2.2727 −3.7879] pu (1-23)
The 𝑍𝐵𝑈𝑆⊝3 matrix can be obtained from,
1 Important notice: since the target is to find the system contribution related to the generation loss in Area 3 and bus 3, therefore in the original YBUS matrix, the admittances of transformer and generator in Area 3 should be eliminated. Hence, 𝑌33
′ = 𝑌32 + 𝑌13. For other areas, e.g. Area 1, this quantity is equal to 𝑌11 = 𝑌12 + 𝑌13 + 𝑋𝑡 + 𝑋𝑑′ same as regular
YBUS matrix.

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
13
𝑍𝐵𝑈𝑆⊝3 = (𝑌𝐵𝑈𝑆
⊝3)−1= 𝑗 [
0.2345 0.1095 0.15950.1095 0.2345 0.18450.1595 0.1845 0.4385
] pu (1-24)
The system Thevenin impedance in Figure 5, is equal to 𝑋𝑡ℎ33 = 0.4385 pu which is equal to 𝑍𝐵𝑈𝑆
⊝3,33 in (1-24).
In Figure 5, suppose generator E4 with the rated nominal power of 0.1pu is tripped (∆𝑃0 = 0.1 pu). The
contribution of local remaining in service generator E3 to the loss of this generator is,
∆𝑃3 =𝑋𝑡ℎ33
𝑋𝑡ℎ33+𝑋𝑑
′+𝑋𝑡∆𝑃0 = 0.56∆𝑃0 = 0.056 pu (1-25)
For this level of contribution,
𝑑𝑓3𝑑𝑡
= 0.056𝑓02𝐻3
(1-26)
By this, the minimum required inertia for the remaining generator in Area 3 to meet an acceptable level of
RoCoF, e.g. maximum 2Hz/s will be 6.25 s, that is about twice of its original value of 3 s.
For finding the ∆𝑃1, firstly it is required to convert the network to the radial configuration like Figure 6. For
this, we back to the YBUS and ZBUS matrixes but this time with eliminating the admittances of generator and
its associated transformer in Area 1 as,
𝑌𝐵𝑈𝑆⊝1 = 𝑗 [
−3.1545 1.6393 1.51521.6393 −6.8190 2.27271.5152 2.2727 −6.6949
] pu
𝑍𝐵𝑈𝑆⊝1 = 𝑗 [
0.4891 0.1742 0.16980.1742 0.2274 0.11660.1698 0.1166 0.2274
]
(1-27)
The electrical impedance 𝑗𝑋𝑒13 can be obtained from ZBUS by applying (1-17) as:
𝑋𝑒13 = 𝑍13
𝑡ℎ𝑒𝑣 = 𝑍𝐵𝑈𝑆⊝1,11 + 𝑍𝐵𝑈𝑆
⊝1,33 − 2𝑍𝐵𝑈𝑆⊝1,13 = 𝑗0.3769 pu (1-28)
and similarly for 𝑗𝑋𝑒23,
𝑋𝑒23 = 𝑗0.2552 pu (1-29)
Finally,
∆𝑃1 =0.2552+0.344
0.2552+0.344+0.3769+0.344× 0.44∆𝑃0 = 0.45 ∗ 0.44∆𝑃0 = 0.198∆𝑃0 = 0.0198 pu
∆𝑃2 = 1 − ∆𝑃1 − ∆𝑃3 = 0.242∆𝑃0 = 0.0242 pu
(1-30)
With the inertia value for areas 1 and 2 equal to 3, we have
𝑑𝑓1𝑑𝑡
= 0.0198𝑓02𝐻1
= 0.165 𝐻𝑧/𝑠
𝑑𝑓2𝑑𝑡
= 0.0242𝑓02𝐻2
= 0.202 𝐻𝑧/𝑠
(1-31)

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
14
and 𝑑𝑓3
𝑑𝑡]𝐻3=3
= 0.46 𝐻𝑧/𝑠.
For proving the accuracy of the results, reader is encouraged to see the results of simulation performed with
the Power-Factory on a same network, in Figures 7 and 8.
By this method, a good and reliable criteria can be defined for the minimum level of inertia needed in each
area of power system to maintain and limit the area (local) RoCoF through an acceptable band.
Figure 7 Results from simulation the network in the Power-Factory

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
15
Figure 8 Zoomed view of Figure 7

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
16
1. Effect of inertia distribution on small signal stability In this section, the effect of uneven inertia distribution on system small signal stability and inter-area
oscillations is investigated and studied. Small signal stability is the ability of the power system to maintain
synchronism when subjected to small disturbances [3].
In this context, there are two types of instability can occur: the steady state rotor angle increase due to lack
of synchronizing torque and then the increasing rotor oscillations due to insufficient damping torque. In
today’s practical power systems, the small signal stability problem is usually one of insufficient damping of
system oscillations. Generator–turbine inertia generally plays a key role in providing synchronizing capability
to the synchronous generators whenever a disturbance results in a mismatch between the mechanical power
input and the electrical power output of a generator [4].
The best benchmark for evaluating the small signal stability is through the evaluation of system modes, since
these modes indicate the system damping as well as the magnitude and frequency of oscillations following a
disturbance [5].
2.1. Effect of inertia distribution on system modes 2.1.1. Modal analysis According to the theory of linear control, a linearized form of system equations can be represented as:
∆�̇� = 𝐴∆𝑋 + 𝐵∆𝑢
∆𝑦 = 𝐶∆𝑋 + 𝐷∆𝑢 (2-1)
where ∆𝑋, ∆𝑦 and ∆𝑢 are system state, output and input vectors respectively. 𝐴, 𝐵, 𝐶 and 𝐷 are sate, input,
output and feed-forward matrixes respectively. It can be shown that the time response of the 𝑖th state
variable (with zero input) is given by [3]:
∆𝑥𝑖(𝑡) = 𝜑𝑖1𝑐1𝑒𝜆1𝑡 + 𝜑𝑖2𝑐2𝑒
𝜆2𝑡 +⋯+ 𝜑𝑖𝑛𝑐𝑛𝑒𝜆𝑛𝑡
(2-2)
where 𝜑𝑖𝑛 is the element of the 𝑖 th row and 𝑛th column of the system right eigenvector matrix, 𝚽 =
[𝝋1 𝝋2… 𝝋𝑛] and 𝑐𝑖 = 𝝍𝑖Δ𝑥(0) represents the magnitude of the excitation of the 𝑖th mode resulting from
the initial condition1. The system eigenvalues correspond to 𝜆𝑖 which defines the stability of the system and
be obtained from 𝑑𝑒𝑡(𝑠𝑰 − 𝑨) = 0. The general form of eigenvalues in a real system is 𝜆𝑖 = 𝜎𝑖 ± 𝑗𝜔𝑖 and for
each eigenvalue 𝜆𝑖,
𝑓𝑖 =𝜔𝑖2𝜋
(2-3)
is the frequency of oscillation in 𝐻𝑧 and
𝜉𝑖 =−𝜎𝑖
√𝜎𝑖2 +𝜔𝑖
2
(2-4)
is damping ratio where determines the rate of decay of the amplitude of the oscillation. If 𝜔𝑖 = 0, this mode
corresponds to a non-oscillatory mode and a positive 𝜎𝑖 represents aperiodic instability. For complex
1 𝝍 is the left eigenvector matrix.

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
17
eigenvalues, there is oscillatory mode in the system that its damping amplitude depends to the value of 𝜎𝑖,
as a negative value represents a damped oscillation whereas a positive one represents oscillation of
increasing amplitude and instability.
The measure of the association between the state variables and the modes is indicated by the participation
factor as,
𝑷𝑖 = [
𝑝1𝑖𝑝2𝑖⋮𝑝𝑛𝑖
] = [
𝜑1𝑖𝜓𝑖1𝜑2𝑖𝜓𝑖2⋮
𝜑𝑛𝑖𝜓𝑖𝑛
]
(2-5)
The elements 𝑝𝑘𝑖 = 𝜙𝑘𝑖𝜓𝑘𝑖 is termed the participation factor. It is a measure of the relative participation of
the 𝑘th state variable in the 𝑖th mode and vice versa.
2.1.2. Two-area power system Consider a two-area power system connecting via a transmission line as shown in Figure 9, with the
generators represented by the classical model and all resistance neglected.
Figure 9 Two-area power simple power system model
The all generations in each area are aggregated to one equal generator representing the total inertia in that
area. Here, 𝐸′ and 𝛿 represent the voltage behind the machine transient reactance 𝑋𝑑′ and rotor angle
respectively. 𝑋𝑡𝑖𝑒−𝑙𝑖𝑛𝑒 is tie-line reactance with the system total reactance 𝑋𝑇 = 𝑋𝑑1′ + 𝑋𝑡𝑖𝑒−𝑙𝑖𝑛𝑒 + 𝑋𝑑2
′ .
With the stator resistance neglected, the air-gap power (𝑃𝑒) is equal to the terminal power (𝑃). In per-unit,
the air-gap torque is equal to the air-gap power. Hence,
𝑇𝑒1 = 𝑃1 =𝐸1′𝐸2′
𝑋𝑇sin (𝛿1 − 𝛿2)
𝑇𝑒2 = 𝑃2 =𝐸1′𝐸2′
𝑋𝑇sin (𝛿2 − 𝛿1)
(2-6)
Linearizing about an initial condition represented by 𝛿01and 𝛿02 yields
∆𝑇𝑒1 =𝜕𝑇𝑒1𝜕𝛿1
∆𝛿1 +𝜕𝑇𝑒1𝜕𝛿2
∆𝛿2 =𝐸1′𝐸2′
𝑋𝑇cos (𝛿01 − 𝛿02)(∆𝛿1 − ∆𝛿2)
∆𝑇𝑒2 =𝜕𝑇𝑒2𝜕𝛿1
∆𝛿1 +𝜕𝑇𝑒2𝜕𝛿2
∆𝛿2 =𝐸1′𝐸2′
𝑋𝑇cos (𝛿02 − 𝛿01)(−∆𝛿1 + ∆𝛿2)
(2-7)

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
18
The equation of motion in per-unit are:
𝑝∆𝜔𝑟 =1
2𝐻(𝑇𝑚 − 𝑇𝑒 −𝐾𝐷∆𝜔𝑟)
𝑝𝛿 = 𝜔0∆𝜔𝑟 (2-8)
where ∆𝜔𝑟 is per unit speed deviation, 𝛿 is rotor angle in electrical radians, 𝜔0 is the base rotor electrical
speed in radians per second, 𝐾𝐷 is system damping factor1 and 𝑝 is the differential operator 𝑑/𝑑𝑡 with time
𝑡 in seconds.
Linearizing Equation (2-8) and substituting for ∆𝑇𝑒 given by Equation (2-7), we obtain
𝑝∆𝜔𝑟1 =1
2𝐻1(∆𝑇𝑚1 − 𝐾𝑠1(∆𝛿1 − ∆𝛿2) − 𝐾𝐷1∆𝜔𝑟1)
𝑝∆𝛿1 = 𝜔0∆𝜔𝑟1
𝑝∆𝜔𝑟2 =1
2𝐻2(∆𝑇𝑚2 − 𝐾𝑠2(−∆𝛿1 + ∆𝛿2) − 𝐾𝐷2∆𝜔𝑟2)
𝑝∆𝛿2 = 𝜔0∆𝜔𝑟2
(2-9)
and in the vector-matrix form;
𝑑
𝑑𝑡[
∆𝜔𝑟1∆𝛿1∆𝜔𝑟2∆𝛿2
] =
[ −𝐾𝐷12𝐻1
−𝐾𝑠12𝐻1
0𝐾𝑠12𝐻1
𝜔0 0 0 0
0𝐾𝑠22𝐻2
−𝐾𝐷22𝐻2
−𝐾𝑠22𝐻2
0 0 𝜔0 0 ]
⏟ 𝑨
[
∆𝜔𝑟1∆𝛿1∆𝜔𝑟2∆𝛿2
] +
[ 1
2𝐻10
01
2𝐻2]
⏟ 𝑩
[∆𝑇𝑚1∆𝑇𝑚2
]
(2-10)
where 𝐾𝑠 is synchronizing torque coefficient given by
𝐾𝑠1 = (𝐸1′𝐸2′
𝑋𝑇) cos (𝛿01 − 𝛿02)
𝐾𝑠2 = (𝐸1′𝐸2′
𝑋𝑇) cos (𝛿02 − 𝛿01)
(2-11)
For this case, 𝐾𝑠1 = 𝐾𝑠2. The Equation (2-10) is of the form �̇� = 𝑨𝑿 + 𝑩𝒖. The elements of state matrix 𝑨
are seen to be dependent on the system parameters 𝐾𝐷1, 𝐻1, 𝐾𝐷2, 𝐻2, 𝑋𝑇 and the initial operating condition
represented by the value of 𝐸1′ , 𝐸2
′ , 𝛿01 and 𝛿02. The block diagram representation shown in Figure 10 can
be used to describe the small signal performance.
Suppose the system faces a step change in the input of AREA 1, i.e. Δ𝑇𝑚1, and we want to see it’s response
to this disturbance. By applying the Mason's gain formula on Figure 10, the system function describing the
Δ𝜔 in terms of the Δ𝑇𝑚1 can be obtained as,
1 For a single generator this is related to the effect of damper windings but for a system, it also includes the effects of system load
and any rotational masses dynamics.

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
19
∆𝜔1(𝑠)
Δ𝑇𝑚1(𝑠)=
1
4𝐻1𝐻2(2𝐻2𝑠
2 + 𝐾𝐷2𝑠 + 𝐾𝑠2𝜔0𝑠3 + A𝑠2 + Β𝑠 + C
)
∆𝜔2(𝑠)
Δ𝑇𝑚1(𝑠)=
1
4𝐻1𝐻2(
𝐾𝑠2𝜔0𝑠3 + A𝑠2 + Β𝑠 + C
)
where ∶ Α =1
2(1
𝐻1𝐾𝐷1 +
1
𝐻2𝐾𝐷2) ; Β =
1
2(1
𝐻2𝐾𝑠2𝜔0 +
1
𝐻1𝐾𝑠1𝜔0 +
1
2𝐻1𝐻2𝐾𝐷1𝐾𝐷2)
C =𝜔0
4𝐻1𝐻2(𝐾𝐷1𝐾𝑠2 +𝐾𝐷2𝐾𝑠1)
(2-12)
A similar expression can be achieved for ∆𝜔1/Δ𝑇𝑚2 and ∆𝜔2/Δ𝑇𝑚2. For both system functions in (2-12), the
denominator is same as expected before, indicates the identical poles for two systems. According to the
theory of small signal stability, as long as the system operates around a linear equilibrium point, the stability
constraints will be same for both areas under study. The only difference between the system function of
AREA 1 and AREA 2 is in the number of zeros as AREA 1 has two zeros in its system function while AREA 2
does not have any. How these zeros affect the response of the system can be studied through the following
formulation. Let consider the system function of AREA 1, it can be rewritten as:
∆𝜔1(𝑠)
Δ𝑇𝑚1(𝑠)=2𝐻2𝑠
2
𝐾𝑠2𝜔0𝑌(𝑠) +
𝐾𝐷2𝑠
𝐾𝑠2𝜔0𝑌(𝑠) + 𝑌(𝑠) (2-13)
where 𝑌(𝑠) =∆𝜔2(𝑠)
Δ𝑇𝑚1(𝑠)=
1
4𝐻1𝐻2(
𝐾𝑠2𝜔0
𝑠3+A𝑠2+Β𝑠+C) , is the system function of AREA 2. The step response for this
system will be:
∆𝜔1(𝑠) =2𝐻2𝐾𝑠2𝜔0
𝑠𝑌(𝑠) +𝐾𝐷2𝐾𝑠2𝜔0
𝑌(𝑠) +1
𝑠𝑌(𝑠) (2-14)
and finally the response in time domain could be obtained from the inverse Laplace transform as,
∆𝜔1(𝑡) = ℒ−1 (
2𝐻2𝐾𝑠2𝜔0
𝑠𝑌(𝑠) +𝐾𝐷2𝐾𝑠2𝜔0
𝑌(𝑠) +1
𝑠𝑌(𝑠)) =
=2𝐻2𝐾𝑠2𝜔0
∆�̈�2(𝑡) +𝐾𝐷2𝐾𝑠2𝜔0
∆�̇�2(𝑡) + ∆𝜔2(𝑡)⏟ 𝑅𝑒𝑠𝑝𝑜𝑛𝑠𝑒 𝑜𝑓𝐴𝑅𝐸𝐴 2
(2-15)
According to (2-15) the step response of AREA 1 is given by the step response of the AREA 2 plus a scaled
version of the first and second derivative of the step response of the AREA 2. Note that as 𝐻2 increases1 (i.e.,
as the zero moves closer into the imaginary axis 2), the term 2𝐻2 𝐾𝑠2𝜔0 ⁄ becomes larger, and thus the
contribution of the term ∆�̈�2(𝑡) increases and leads to a faster response and higher overshoot as a result for
AREA 2 response [6]. Increasing the damping factor in AREA 2 also has an increasing effect on faster response
of AREA 1 and higher overshoot but its effect is minor compared to the 𝐻2 since it increases the magnitude
of the first order derivative of the speed. As expected before, increasing the synchronizing torque will
decrease the overshoot of AREA 1 and the step response of this system starts to resemble the step response
1 Note that when the 𝐻2 increases, the 𝐻1 is constant that leads to more inertia concentration in ARAE 2. 2 The zeros of the system are (−
𝐾𝐷2
4𝐻2) ±
1
4𝐻2√𝐾𝐷
2 − 8𝐻2𝐾𝑠2𝜔0 ,

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
20
of the ARAE 2 as 𝐾𝑠2 is increased1. In next section, the effect of inertia distribution will be investigated with
more details by means of its effect on system poles and zeros.
2.1.3. Pole and zero change It is clear from (2-10) and (2-12) that the system small signal response depends on the different parameters
such as damping factor 𝐾𝐷 , synchronizing torque 𝐾𝑠 , inertia 𝐻, and initial condition Δ𝛿0, 𝐸′ . In addition,
Equation (2-12) shows that the response of the AREA 1 is affected from the system parameters of AREA 2
since these parameters change the location of Zeros in AREA 1. In this section, the effect of different inertia
distribution on the system response is investigated and studied. At first, a modal analysis is performed to
study its effect on system root locus and then a time domain analysis will be run to see the response of the
system in the time domain. All studies will be carried out by using (2-10) and (2-12).
As stated in previous section, the system modes can be calculated from 𝑑𝑒𝑡(𝑠𝑰 − 𝑨) = 0. Figure 10 shows
the changes in system modes calculated based on (2-10) for different inertia distribution with the original
configuration and typical parameters2. From this Figure, following facts are resulted as,
1) In case of total inertia change, however the system frequency and damping are increased when
inertia is decreased, but the dominancy of zeros and poles for oscillatory modes remains unchanged
(see Figure 11(a)). Due to this fact, the amplitude of the pole function in system response remains
unaffected and the oscillation amplitude for the both systems will be same as can be seen from
Figure 12(a). In this Figure, the system total inertia is reduced equally for both areas from its original
value down to 50% and 25%. However, system oscillation and damping are increased, but there is
no any significant overshoot in the response, as the dominancy of poles and zeros remains constant.
2) When the distribution of inertia is changed, i.e. when more inertia is concentrated at one area (AREA
2 in this case), the dominancy of zeros and poles is changed. In this case, as the poles get farther
from the imaginary axis, the zeros get closer to it and in fact, the zeros take the dominancy of the
response and some significant overshoot will be emerged in the response as depicted in Figure 12(b).
In this Figure, the response of both areas in case of increasing inertia distribution in AREA 2 is plotted.
As seen, when the inertia is more concentrated in AREA 2 (total system inertia is same in all cases),
and the inertia of AREA 1 is reduced down to 50% and 75%, a significant overshoot is observed in
the response of AREA 1 while the response of AREA 2 almost remains unchanged. Oscillations with
large amplitude for AREA 1 is a threat for its transient stability as it may not able to maintain in
synchronous with the AREA 2, meanwhile it might be a risk for mal-operation of tie-line protection
relays.
3) For non-oscillatory modes, i.e. the modes are located on the real axis, only system total inertia
affecting on them and they do not change in case of system inertia distribution. These modes do not
contribute in system damping and oscillations.
1 𝐾𝑠2 is increased as the tie-line impedance or the (𝛿02 − 𝛿01) are decreased. The latter is decreased with the reducing of power transfer between two areas. 2 𝐾𝑠1 = 𝐾𝑠2 = 0.7611 pu torque/rad, 𝐾𝐷1 = 𝐾𝐷2 = 10 pu torque/pu speed, 𝑋𝑇 = 0.95 pu, 𝛿01 − 𝛿02 = 49.92
𝑜 , 𝐸1′ = 1.123 pu,
𝐸2′ = 1 pu, 𝑆𝐵 = 2220 MVA, 𝐻1 = 𝐻2 = 3.5 s [3].

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
21
𝐾𝑆1
𝐾𝑆1
𝐾𝐷1
1
2𝐻1𝑠
∆𝜔1 𝜔0
𝑠
∆𝛿1 ∆𝑇𝑚1
𝐾𝑆2
𝐾𝑆2
1
2𝐻2𝑠
𝐾𝐷2
∆𝑇𝑚2 ∆𝜔2 𝜔0
𝑠
∆𝛿2
+
+
+
+
-
-
-
-
Figure 10 Block diagram of the two-area power system with classical generator model
(a)
(b)
Figure 11 Changes in system modes corresponds to the system inertia (a) equal inertia distribution (b) different inertia distribution
(a)
(b)
Figure 12 Time-response of the two-area model following a step change in AREA 1 input

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
22
(a) equal inertia distribution (b) different inertia distribution
2.2. Stability assessment of three-area power system In this section, the small signal stability of a three-area synchronized power system is investigated and
discussed. For this, consider a three-area power system with equal in size and similar parameters as shown
in Figure 13. This model is similar to the IEEE 9-bus standard test system except that for simplicity, all loads
are moved from their original locations to the inside of the areas. Generators are modelled with classical
model with a source behind a transient reactance, transformers with short circuit reactance and loads with
constant impedance model with a damping factor simulating their dynamic behaviour. The electrical model
and its equivalent is depicted in Figure 14. In Figure 15, the equivalent circuit of the model is obtained by
eliminating the internal nodes of generators and their associated transformers. This can be obtained from:
Area 2 Area 3
Area 1
L1 L2
L3
Figure 13 Three-area power system
Figure 14 Electrical model of the 3-area model

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
23
Figure 15 Reduced equivalent circuit of 3-area system
𝜶𝑽 = 𝑬
𝑽 = 𝑬 − 𝑗𝑿𝑮𝑰
(2-16)
where 𝜶 is a (3x3) matrix obtained from applying KCL on separate nodes and 𝑿𝑮 = [
𝑋𝑔1 0 0
0 𝑋𝑔2 0
0 0 𝑋𝑔3
], such
that 𝑋𝑔𝑖 = 𝑋𝑑𝑖′ + 𝑋𝑡𝑟𝑖. From this, the bus impedance matrix of the reduced model can be calculated by,
𝒁𝑩𝑼𝑺 = (𝜶 − 𝑰)−1𝜶𝑿𝑮 (2-17)
For finding the equivalent impedances of tie-lines in Figure 15, following formulation is considered,
𝒀𝑩𝑼𝑺 = (𝒁𝑩𝑼𝑺)−1
𝑋12 = imag(−1
𝑌𝐵𝑈𝑆(1,2)), 𝑋13 = imag(
−1
𝑌𝐵𝑈𝑆(1,3)), 𝑋23 = imag(
−1
𝑌𝐵𝑈𝑆(2,3))
(2-18)
The state matrix of this system includes 6 state variables can be obtained based on (2-6) and (2-8) as
formulated in (2-19).
In order to investigate the effect of inertia distribution on system small signal stability and finding a criteria
for the minimum required inertia in each region, a sensitivity analysis is performed on the behaviour of
system eigenvalues to the inertia distribution. The eigenvalue sensitivity with respect to inertia of the 𝑗th
generator (𝐻𝑗) is expressed as (2-20) [8].

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
24
𝑑
𝑑𝑡
[ ∆𝜔𝑟1∆𝛿1∆𝜔𝑟2∆𝛿2∆𝜔𝑟3∆𝛿3 ]
=
=
[ −𝐾𝐷1 2𝐻1⁄ (−𝐾𝑠
12 − 𝐾𝑠13) 2𝐻1⁄ 0 𝐾𝑠
12/2𝐻1 0 𝐾𝑠13/2𝐻1
𝜔0 0 0 0 0 0
0 𝐾𝑠12/2𝐻2 −𝐾𝐷2 2𝐻2⁄ (−𝐾𝑠
12 − 𝐾𝑠23) 2𝐻2⁄ 0 𝐾𝑠
23/2𝐻20 0 𝜔0 0 0 0
0 𝐾𝑠13/2𝐻3 0 𝐾𝑠
23/2𝐻3 −𝐾𝐷3 2𝐻3⁄ (−𝐾𝑠13 − 𝐾𝑠
23) 2𝐻3⁄
0 0 0 0 𝜔0 0 ]
[ ∆𝜔𝑟1∆𝛿1∆𝜔𝑟2∆𝛿2∆𝜔𝑟3∆𝛿3 ]
+ [
1/2𝐻1 0 00 1/2𝐻2 00 0 1/2𝐻3
] [
∆𝑇𝑚1∆𝑇𝑚2∆𝑇𝑚3
]
(2-19)
𝜕𝜆𝑖∂𝐻𝑗
=
𝜓𝑖𝑇 𝜕𝐴𝜕𝐻𝑗
𝜙𝑖
𝜓𝑖𝑇𝜙𝑖
(2-20)
By this, the sensitivity of the detrimentally impacted critical mode of system with respect to the inertia of the
system generators with the same parameters used in the previous section is computed and plotted. Figure
16 shows the real part sensitivity of eigenvalues for three different inertia distribution. Figure 16(a) for the
identical inertia for all areas (base case), 16(b) and 16(c) for 33% and 67% inertia reduction in Area 3 and 67%
and 33% increase in Areas 1 and 2, respectively (cases 2 and 3) and 16(d) for extremely low inertia in Area 3
(case 4).
16 (a) (H1=H2=H3=3 s)
16 (b) (H1=H2=3.5 s, H3=2 s)
16 (c) (H1=H2=4 s, H3=1 s)
16 (d) (H1=H2=4.45 s, H3=0.1 s)
Figure 16 Sensitivity of the real parts of the eigenvalues to the inertia distribution
-1
-0,5
0
0,5
λ1 λ2 λ3 λ4 λ5 λ6
H1 H2 H3
-1,5
-1
-0,5
0
0,5
1
λ1 λ2 λ3 λ4 λ5 λ6
H1 H2 H3
-4
-2
0
2
4
λ1 λ2 λ3 λ4 λ5 λ6
H1 H2 H3
-30
70
170
270
λ1 λ2 λ3 λ4 λ5 λ6
H1 H2 H3

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
25
There are six modes in the system, two complex conjugate modes [(𝜆1, 𝜆2) , (𝜆5, 𝜆6)], one zero mode, 𝜆3
which is located at the origin and represents the unchangeable state of 𝛿3 and 𝜆4 which is a non-oscillatory
mode located at the negative real axis. For the base case (same inertia distribution), (𝜆1, 𝜆2) = −0.8333 ±
9.1567𝑖, 𝜆3 = 0, 𝜆4 = −1.6667 and (𝜆5, 𝜆6) = −0.833 ± 8.6237𝑖, which implies the dominancy for both
(𝜆1, 𝜆2) and (𝜆5, 𝜆6) modes in the system response.
As can be seen from Figure 16, when the inertia distribution is more uneven in different areas, the changes
in the sensitivity of 𝜆4 , (𝜆5, 𝜆6) is much less than the (𝜆1, 𝜆2). This means that the system modes 𝜆4 and
(𝜆5, 𝜆6) are remain unchanged, but the (𝜆1, 𝜆2) will change significantly when the inertia is decreased in Area
3 and increased in other two areas. In addition, in case of uneven inertia distribution, as shown in Figures 16
(b) to 16 (d), the direction of change of (𝜆1, 𝜆2), i.e. the sign of the sensitivity, is changed from the negative
value to the positive value. Since,
Δ𝜆𝑖 =𝜕𝜆𝑖∂𝐻𝑗
Δ𝐻𝑗 (2-21)
therefore, any reduction in the inertia of Area 3 will resulted to get (𝜆1, 𝜆2) farther from right half plane
significantly, losing their dominancy and consequently, higher oscillation magnitude in the response of Area
3. Figure 17 shows the time response for Δ𝜔 of all areas for four cases obtained from ss2tf and step
command in MATLAB. The blue and black curves denoting the response of Areas 1 and 2 while the red curves
show the response of Area 3. As can be seen, for more uneven inertia distribution, the overshoot in the
response of Area 3 will significantly increase. This will guide us to a criterion for a minimum required inertia
distribution in the system.
Figure 17 Step response of speed deviation (in Hz) with different inertia distribution in the 3-area power system

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
26
The high deviation in the generator’s speed Δ𝜔 may approach the rotor angle to the static unstable point on
a 𝑃 − 𝛿 curve and normally is 𝜋
2 radian. In Figure 18, the maximum rotor angle during the oscillations for
different inertia distribution in the system is plotted. In this study, the inertia of Areas 1 and 2 are same as to
each other while the inertia of Area 3 is reduced continuously. Following constraints should be satisfied as,
𝐻1 = 𝐻2, RIC% =𝐻3𝐻1× 100
∑𝐻𝑗
3
𝑗=1
= constant
(2-22)
where RIC denoted to Regional Inertia Distribution. For finding a criteria for minimum RIC, a stability margin
index (SMI) is introduced based on the rotor angle distance from its maximum static stability quantity as,
𝑆𝑀𝐼% = 50%×4
𝜋(𝛿𝑚𝑎𝑥 −
𝜋
4) + 50% (2-23)
In (2-23), it is assumed that the SMI for 𝛿 =𝜋
4 is equal to 50%. As can be seen, for different level of SMI, a
minimum level of RIC is required. For example, for 30% of SMI, the minimum level of RIC should be around
66% that means that the inertia of Area 3 should be at least 66% of the inertia of Area 1 or Area 2. For a lower
SMI, i.e. lower stability margin, smaller RIC is acceptable. For this system, the minimum SMI that is
correspond to the RIC of 25% is equal to 23.2% while the maximum value of SMI, as it was expected before,
is related to the 100% of RIC i.e., equal inertia distribution in three areas.
Figure 18 Maximum rotor angle for different RIC in the three-area power system

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
27
2. Transient/Rotor-angle Stability In this section, the effect of inertia distribution on transient stability will be formulated and discussed. The
three common methods applied to modelling and analysis the system dynamics for transient stability studies
are Equal Area Criterion (EAC), numerical integration methods (time-domain simulation method) and direct
methods. The EAC is a reliable and straightforward method in which the stability limit of the system may be
obtained graphically by using the power-angle diagram. In addition, by using this method, it is possible to
find the information regarding the maximum angle excursion (𝛿𝑚) and the Unstable Equilibrium Point (UEP).
The problem of using the EAC method in practical networks is that it cannot applied to a multi-machine
network, since the existence of post-disturbance dynamics in the network makes it impossible to consider
the network as infinite bus [7]. At present, the most practical available method of transient stability analysis
is time-domain simulation in which the non-linear differential equations are solved by using systematic (step-
by-step) numerical integration techniques. However, this method is common methods widely used in multi-
machine power networks, but the stability margin could not be determined easily via this method. The direct
methods determine stability without explicitly solving the system differential equations. The energy-based
methods are a special case of the more general Lyapunov’s second method. One of the benefits of direct
methods is that it can determine the stability margin of the system, but like the EAC, applying this method to
a large network is very challenging task. In this section, the direct method will be used to understand the
effect of inertia distribution on system transient stability.
3.1. Direct method of transient stability analysis 3.1.1. Description of the transient energy function approach The transient energy approach can be described by considering a ball rolling on the inner surface of a bowl
as depicted by Figure 19. The area inside the bowl represents the region of stability, and the area outside the
area outside is the region of instability. The rim of the bowl is irregular in shape so that different points on
the rim have different heights [3].
Figure 19 Bowl and ball of transient energy concept [3]
Initially the ball is resting at the bottom of the bowl, and this state is referred as Stable Equilibrium Point
(SEP). During the fault, when some kinetic energy is injected to the ball, causing it to move in a particular
direction, the ball will roll up the inside surface of the bowl along the path determined by the direction of
initial motion. The point where the ball will stop is governed by the amount of kinetic energy initially injected.
If the ball converts all its kinetic energy into potential energy before reaching the rim, then it will roll back
and eventually settle down at the stable equilibrium point again. However, if the kinetic energy injected is
high enough to cause the ball to go over the rim, then the ball will enter the region of instability and will not

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
28
return to the stable equilibrium point. The surface inside the bowl represents the potential energy surface,
and the rim of the bowl represents the potential energy boundary surface (PEBS).
Two quantities are required to determine if the ball will enter the stability region: (a) the initial kinetic energy
injected and (b) the height of the rim at the crossing point. The location of the crossing point depends on the
direction of initial motion.
According to this method, the state of the system at fault clearing (𝒙𝑐𝑙) can be described by the value of
energy function evaluated at 𝒙𝑐𝑙 , i.e., 𝑉(𝒙𝑐𝑙). Hence, the direct method solves the stability problem by
comparing 𝑉(𝒙𝑐𝑙) to the critical energy 𝑉𝑐𝑟 . The system is stable if 𝑉(𝒙𝑐𝑙) < 𝑉𝑐𝑟 . Therefore, 𝑉𝑐𝑟 − 𝑉(𝒙𝑐𝑙)
may be a good measure of system relative stability. This quantity is defined as the transient energy margin.
The quantity 𝑉(𝒙𝑐𝑙) measures the amount of transient energy injected into the system by the fault while the
critical energy measures the strength of the post-fault system to absorb the excess energy of the generator
during the fault period. Referred to Figure 20, if the rotor oscillates within the range of 𝛿𝑢1 to 𝛿𝑢2, the system
will remain transiently stable. Therefore, the two points 𝛿𝑢1 and 𝛿𝑢2, on the potential energy curve form a
boundary to all rotor angle trajectories. This boundary called potential energy boundary surface (PEBS).
Figure 20 Region of transient stability
3.1.2. Analysis of a practical power system For the application of direct energy method on real power networks, it is convenient to describe the motion
of generators with respect to the centre of inertia (COI) as:
�̃�𝑖 = 𝛿𝑖 − 𝛿𝐶𝑂𝐼 (rad) (3-1)
and
�̃�𝑖 =�̇̃�𝑖
𝜔0= (
�̇�𝑖
𝜔0⏟=∆𝜔𝑟: 𝑐ℎ𝑎𝑛𝑔𝑒𝑠 𝑖𝑛𝑟𝑜𝑡𝑜𝑟 𝑠𝑝𝑒𝑒𝑑
− ∆𝜔𝐶𝑂𝐼⏟ 𝑐ℎ𝑎𝑛𝑔𝑒𝑠 𝑖𝑛𝐶𝑂𝐼 𝑠𝑝𝑒𝑒𝑑
) pu (3-2)
where 𝜔0 = 2𝜋𝑓0, �̃�𝑖 and �̃�𝑖 is the angle and pu speed of the 𝑖th machine with respect to the COI, 𝛿𝐶𝑂𝐼 and
∆𝜔𝐶𝑂𝐼 are the COI angle and pu speed deviation from the synchronous speed. 𝛿𝐶𝑂𝐼 is defined as1,
1 Note that the COI oscillates when system oscillates as well, for example during a fault or in the post-fault conditions. Therefore, the COI is not a constant frame.

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
29
𝛿𝐶𝑂𝐼 ≜1
𝐻𝑇∑ 𝐻𝑖𝛿𝑖𝑛𝑖=1 (3-3)
where 𝐻𝑇 is the sum of the inertia constants of all 𝑛 generators in the system. The equation of motion of the
𝑖th machine in the COI reference frame are,
2𝐻𝑖𝑑�̃�𝑖
𝑑𝑡= 𝑃𝑚𝑖
′ − (𝑃𝑒𝑖 +𝐻𝑖
𝐻𝑇𝑃𝐶𝑂𝐼)⏟
𝑠𝑦𝑠𝑡𝑒𝑚 𝑐𝑎𝑝𝑎𝑏𝑖𝑙𝑖𝑡𝑦𝑖𝑛𝑑𝑒𝑥
𝑑�̃�𝑖𝑑𝑡
= �̃�𝑖𝜔0
(3-4)
If machine stator resistance to be considered as negligible, 𝑃𝑚𝑖′ and 𝑃𝑚𝑖 would be equal1. The 𝑖th machine
electrical output power is 𝑃𝑒𝑖 and 𝑃𝐶𝑂𝐼 is the acceleration power at the COI and is equal to 𝑃𝐶𝑂𝐼 =
∑ (𝑃𝑚𝑖′ − 𝑃𝑒𝑖)
𝑛𝑖=1 . The quantity of 𝑃𝑒𝑖 is dependent to the network configuration and angle discrepancy
between different machines, as:
𝑃𝑒𝑖 =∑[𝐸𝑖𝐸𝑗𝐵𝑖𝑗 sin(𝛿𝑖 − 𝛿𝑗) + 𝐸𝑖𝐸𝑗𝐺𝑖𝑗(𝛿𝑖 − 𝛿𝑗)]
𝑛
𝑗=1𝑗≠𝑖
(3-5)
where 𝐸𝑖 and 𝐸𝑗 are internal voltage of the 𝑖 th and 𝑗th machines respectively, 𝐵𝑖𝑗 is the imaginary part of
system reduced admittance matrix and 𝐺𝑖𝑗 is its real part. For simplicity, it is considered that 𝐺𝑖𝑗 is zero, as
the 𝑋
𝑅 ratio for a typical power system is sufficiently large. Applying these assumptions to (3-5) leads to:
𝑃𝑒𝑖= ∑ 𝐸𝑖𝐸𝑗𝐵𝑖𝑗 sin(𝛿𝑖 − 𝛿𝑗)𝑛𝑗=1𝑗≠𝑖
(3-6)
Equation (3-4) reveals that the generator speed deviation, 𝑑�̃�𝑖
𝑑𝑡 during and after a disturbance is related to a
term we named it as system capability index (SCI), in absorbing the probable excess kinetic energy which may
be obtained by the generator during the disturbance. This term is composed of two parts, the first part is 𝑃𝑒𝑖
and it depends on the system configuration2 and the second part is related to the ratio of the machine inertia
to the system total inertia. The higher SCI will increase the likelihood of generator transient stability after the
disturbance. As can be seen, the greater machine inertia, 𝐻𝑖 resulted in the greater SCI and consequently
smaller speed deviation. This gives the machine a better opportunity to calm at a stable point before reaching
to the UEP.
In the post disturbance Stable Equilibrium Point (SEP), the 𝑑�̃�𝑖
𝑑𝑡 is equal to zero which related to the post
disturbance SEP. This value is also zero at the UEPs where the total kinetic energy (KE) of the system is
converted to the potential energy (PE) and the speed deviation tends to zero.
The related energy function �̃� describing the total system transient energy for the post-disturbance system
is defined as,
1 The mechanical input power which is converted to the electrical power, i.e., 𝑃𝑚𝑖
′ = 𝑃𝑎𝑔 − 𝐸𝑖2𝐺𝑖𝑖 = 𝑃𝑚 − 𝐸𝑖
2𝐺𝑖𝑖 2 For example, the number of lines connected to the machine, system demands, etc.

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
30
�̃� = 𝜔0∑𝐻𝑖�̃�𝑖2
𝑛
𝑖=1⏟ 𝑝𝑎𝑟𝑡 1
𝑐ℎ𝑎𝑛𝑔𝑒𝑠 𝑖𝑛 𝑠𝑦𝑠𝑡𝑒𝑚𝑘𝑖𝑛𝑒𝑡𝑖𝑐 𝑒𝑛𝑒𝑟𝑔𝑦
−
(
∑𝑃𝑚𝑖
′ (�̃�𝑖 − �̃�𝑖𝑠)
𝑛
𝑖=1⏟ 𝑝𝑎𝑟𝑡 2
+∑ ∑ [𝐸𝑖𝐸𝑗𝐵𝑖𝑗(cos �̃�𝑖𝑗 − 𝑐𝑜𝑠�̃�𝑖𝑗𝑠 )]
𝑛
𝑗=𝑖+1
𝑛−1
𝑖=1⏟ 𝑝𝑎𝑟𝑡 3 )
⏟
=
𝑐ℎ𝑎𝑛𝑔𝑒𝑠 𝑖𝑛 𝑠𝑦𝑠𝑡𝑒𝑚 𝑝𝑜𝑡𝑒𝑛𝑡𝑖𝑎𝑙 𝑒𝑛𝑒𝑟𝑔𝑦
= �̃�𝑘𝑒 − �̃�𝑝𝑒
(3-7)
where �̃�𝑖𝑠 is the relative angle of bus 𝑖 at the post disturbance SEP. In (3-7), it is assumed that the 𝐺𝑖𝑗 is zero,
means that the change in dissipated energy of all branches in the system is zero (the worst condition). The
part 1 demonstrates the change in rotor kinetic energy of all generators in the COI reference frame. Part 2
points to the change in rotor potential energy of all generators relative to the COI and part 3 is change in
stored magnetic energy of all branches.
The part 1 is called the relative kinetic energy (�̃�𝑘𝑒) and is a function of only generators relative speed and
their inertia constant. In a COI reference frame and in a steady state condition, looking at (3-2), both
the �̇�𝑖 and ∆𝜔𝐶𝑂𝐼 are zero that gives the 𝑉𝑘𝑒𝑠 = 0. This parameter is also zero at the UEPs, since at these
points, all the system relative kinetic energy is converted to the potential energy and �̃�𝑖 = 0. The sum of
parts 2 and 3 is called potential energy (�̃�𝑝𝑒) and is a function of only generator rotor angles and network
configuration. Again, in the steady state condition and in a COI reference frame �̃�𝑖 = �̃�𝑖𝑠 and �̃�𝑖𝑗 = �̃�𝑖𝑗
𝑠 that
resulted in 𝑉𝑝𝑒𝑠 = 0. According to the above explanations, the maximum �̃�𝑝𝑒 is happened at the UEPs.
During the fault, the generator may obtain excess kinetic energy, the maximum value of each will be exactly
at the instance of fault clearing, let name this maximum kinetic energy as1, �̃�𝑘𝑒𝑚𝑎𝑥. Immediately after clearing
the fault, the absorbed kinetic energy is converted to the potential energy that will increase the machine
rotor angle and approaching it to the UEP. The system potential energy could be increased ultimately up to
the UEP point. At this point, any further increment will move the system to the unstable condition. Therefore,
the critical energy for the system stability �̃�𝑐𝑟, is its potential energy at the UEPs. In other words, for system
stability, �̃�𝑘𝑒𝑚𝑎𝑥 should be smaller than �̃�𝑐𝑟 and �̃�𝑐𝑟 − �̃�𝑘𝑒
𝑚𝑎𝑥 could be a good index for system transient
stability margin (TSM).
It is clear from (3-7) that the system potential energy and consequently the �̃�𝑐𝑟 is independent from system
inertia or inertia distribution but in contrast, the inertia plays an important role in the system kinetic energy
and hence the value of �̃�𝑘𝑒𝑚𝑎𝑥. An example of this effect on a simple system is investigated in next section.
3.2. Effect of inertia constant on a single machine infinite bus network Consider a SMIB as shown in Figure 21, where 𝑋𝑑
′ is the transient reactance of the synchronous generator,
𝑋𝑡 is the reactance of the transformer, and 𝑋𝑇 the transmission line reactance connected to an infinite bus.
Circuit 2 experiences a solid three-phase fault at point F, and the fault is cleared by isolating the faulted line.
Because the generator is connected to an infinite bus, 𝐻𝑇 = ∞ and ∆𝜔𝐶𝑂𝐼 = 0. Consequently, �̃�1 = 𝛿 and
�̃�1 = �̇̃�1 𝜔0⁄ = ∆𝜔𝑟. Since 𝐺12 = 0, then 𝑃𝑚1′ = 𝑃𝑚1 and (3-7) is applicable to this system. The post
disturbance dynamic equations of the system corresponding to Equations (3-4) and (3-6), are:
1 During the fault, since the machine rotor angle changes, the quantity of the potential energy also will change, but it is not significant.

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
31
2𝐻1𝑑�̃�1𝑑𝑡
= 𝑃𝑚1 − 𝑃𝑒1 = 𝑃𝑚1 −𝐸𝑎𝐸𝐵𝑋𝑡𝑜𝑡𝑎𝑙
sin �̃�1
𝑑�̃�1𝑑𝑡
= �̃�1𝜔0
(3-8)
where 𝑋𝑡𝑜𝑡𝑎𝑙 = 𝑋𝑑′ + 𝑋𝑡𝑟 + 𝑋𝑇1 is the total impedance between the generator and infinite bus. From
Equation (35), the system transient energy function is
𝑉 = 𝜔0𝐻1�̃�12 − (𝑃𝑚1(�̃�1 − �̃�1
𝑠) +𝐸𝑎𝐸𝐵
𝑋𝑡𝑜𝑡𝑎𝑙(cos �̃�1 − 𝑐𝑜𝑠�̃�1
𝑠)) (3-9)
Figure 21 Single machine connected to an infinite bus for stability study
At the post disturbance SEP, 𝑑�̃�1
𝑑𝑡= 0 and we have
𝑃𝑚1 −𝐸𝑎𝐸𝐵𝑋𝑡𝑜𝑡𝑎𝑙
sin �̃�1𝑠 = 0 ⇒ �̃�1
𝑠 = sin−1 (𝑃𝑚1𝑋𝑡𝑜𝑡𝑎𝑙𝐸𝑎𝐸𝐵
) (3-10)
According to the concept of EAC, �̃�1𝑢 = 𝜋 − �̃�1
𝑠 therefore, the system critical energy is:
𝑉𝑐𝑟 = −(𝑃𝑚1(𝜋 − 2�̃�1𝑠) +
𝐸𝑎𝐸𝐵
𝑋𝑡𝑜𝑡𝑎𝑙(−2𝑐𝑜𝑠�̃�1
𝑠)) (3-11)
The system total energy, 𝑉𝑐𝑙 at fault clearing is
𝑉𝑐𝑙 = 𝜔0𝐻1�̃�1𝑐2 − (𝑃𝑚1(�̃�1𝑐 − �̃�0) +
𝐸𝑎𝐸𝐵
𝑋𝑡𝑜𝑡𝑎𝑙𝑓 (cos �̃�1𝑐 − 𝑐𝑜𝑠�̃�0)) (3-12)
where subscripts 𝑐 denotes to the quantities at the instance of fault clearing, �̃�0 is initial rotor angle equal to
𝛿0 and 𝑋𝑡𝑜𝑡𝑎𝑙𝑓
= 𝑋𝑑′ + 𝑋𝑡𝑟. In a real power system, the duration of fault clearing time are relatively short
(smaller than 100ms) and in this duration, the changes in generator rotor angle is negligible. This enable us
to simplify the Equation (3-12) as
𝑉𝑐𝑙 ≅ 𝜔0𝐻1�̃�1𝑐2 (3-13)
In (3-13), it is assumed that the changes in generator potential energy during the fault period is much smaller
when compared to the changes in kinetic energy. From (3-8) and during the fault (𝑃𝑒1 ≅ 0),

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
32
𝑑�̃�1𝑑𝑡
=1
2𝐻1(𝑃𝑚1) ⟹ �̃�1𝑐 ≅
1
2𝐻1∫ 𝑃𝑚1𝑑𝑡 =𝑡=𝑡𝑐𝑙
𝑡=0
𝑃𝑚12𝐻1
𝑡𝑐𝑙 (3-14)
Substituting in (3-13) yields,
𝑉𝑐𝑙 ≅ 𝜔0𝐻1 (𝑃𝑚12𝐻1
𝑡𝑐𝑙)2
=𝑃𝑚12
4𝐻1𝜔0𝑡𝑐𝑙
2 (3-15)
For transient stability, 𝑉𝑐𝑙 should be smaller than 𝑉𝑐𝑟. By this,
𝑃𝑚12
4𝐻1𝜔0𝑡𝑐𝑙
2 ≤ 𝑉𝑐𝑟 ⟹ 𝑡𝑐𝑙 ≤2
𝑃𝑚1√𝑉𝑐𝑟𝐻1𝜔0
≈ 𝛼√𝐻1 (3-16)
where =2
𝑃𝑚1√𝑉𝑐𝑟
𝜔0 . Equation (3-16) clearly shows the relationship of generator inertia to the CCT of the
transmission circuit in a SMIB system. Since, 𝑉𝑐𝑟 is independent from inertia of the system, it can be inferred
that for a SMIB system, the CCT of the system is proportional to the square root of the generator inertia.
In the next section, we analyse the transient stability of a three machines system and its relation to the inertia
distribution in the system.
3.3. Stability assessment of a three machine system based on inertia distribution
In the previous section, we studied the transient stability of a SMIB and it is proved that the critical clearing
time is a linear function of the square root of inertia. However, this result show a simple approach, but in a
real power system there will be some inter-machine oscillations between different generators in fault-on and
post-fault condition in which make it impossible or very hard to find a clear relationship between the critical
clearing time and the inertia of each machine.
In Figure 22 the IEEE 9-bus three machines system is shown. The inertia of machine 1 is deliberately increased
significantly to represent a slack bus with small deviation in speed during the disturbance. This machine can
be considered as the COI of the system. Therefore, the 𝐻𝑇 in (3-4) is much bigger that 𝐻𝑖 and the system
total transient energy function in (3-7) relative to the COI is simplified to:
𝑉 = (𝜔0𝐻2�̃�22 +𝜔0𝐻3�̃�3
2)⏟ 𝐶ℎ𝑎𝑛𝑔𝑒 𝑖𝑛 𝑟𝑜𝑡𝑜𝑟 𝑘𝑖𝑛𝑒𝑡𝑖𝑐 𝑒𝑛𝑒𝑟𝑔𝑦
−
−𝑃𝑚2(�̃�2 − �̃�2𝑠) − 𝑃𝑚3(�̃�3 − �̃�3
𝑠) −⏟ 𝐶ℎ𝑎𝑛𝑔𝑒 𝑖𝑛 𝑟𝑜𝑡𝑜𝑟 𝑝𝑜𝑡𝑒𝑛𝑡𝑖𝑎𝑙 𝑒𝑛𝑒𝑟𝑔𝑦
−𝐸2𝐸1𝑋21
(cos �̃�21 − 𝑐𝑜𝑠�̃�21𝑠 ) −
𝐸2𝐸3𝑋23
(cos �̃�23 − 𝑐𝑜𝑠�̃�23𝑠 ) −
𝐸3𝐸1𝑋31
(cos �̃�31 − 𝑐𝑜𝑠�̃�31𝑠 )
⏟ 𝐶ℎ𝑎𝑛𝑔𝑒 𝑖𝑛 𝑠𝑡𝑜𝑟𝑒𝑑 𝑚𝑎𝑔𝑛𝑒𝑡𝑖𝑐 𝑒𝑛𝑒𝑟𝑔𝑦 𝑜𝑓 𝑏𝑟𝑎𝑛𝑐ℎ𝑒𝑠
(3-17)
The major impediment to calculate the TEF from (3-27) is calculating the 𝜔2 and 𝜔3 of generators at the
instance of fault clearing time. In addition, for calculating the critical potential energy, the post-fault SEP is

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
33
required which should be calculated from post-fault trajectory of all machines from (3-4). Solving this on a
system of equations may impose a heavy computational burden and ambiguous results. Some references
suggest a hybrid method in which the transient energy calculation is incorporated into the conventional time-
domain simulation [12].
Figure 22 IEEE 9-bus 3 machine test system
The results of this approach is shown in Figure 23 for the power system represented in Figure 22. In this
study, a three-phase fault is applied on line 6-9 close to B6 and this line removed after 700ms by opening its
both ends circuit breakers. After solving the system equations the critical energy would be 2.0117pu and the
post-fault SEP for both machines is about 26° and 28° for G2 and G3 respectively. The reduced admittance
matrix1 for this model is:
𝒀𝒓 = [
1.3085 − 43.7474𝑗 0.1135 + 2.1324𝑗 0.0064 + 0.5692𝑗0.1135 + 2.1324𝑗 0.7213 − 21.1376𝑗 0.0707 + 2.9079𝑗0.0064 + 0.5692𝑗 0.0707 + 2.9079𝑗 0.4584 − 10.5414𝑗
] (Ω) (3-18)
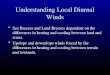
As seen in Figure 23, the transient stability of this system is a function of inertia distribution of G2 and G3.
With keeping the fault duration and location constant, the inertia of G3 should be increased when G2 is
1 By including the generator transient reactances and load admittances in the node admittance matrix

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
34
decreased and vice versa. This example clearly shows the effect of inertia distribution in system transient
stability. However, for larger systems, a practical and systematic approach is needed to obtain such results
that should be studied in the next phase of the project.
Figure 23 Effect of inertia distribution on system transient stability (9-bus IEEE test system)
3. Conclusion A detailed mathematical approach is developed based on the observations obtained from the first step. From
local RoCoF, it is proved that following a generation loss, the RoCoF is not necessarily equal throughout the
system and it is a function of inertia distribution and the electrical distance of every point to the generation
loss. In small signal stability, it is found that the areas with small inertia suffer from larger overshoots as well
as larger frequency of power oscillations in case of a disturbance and therefore lower small signal stability.
For finding a criteria for minimum required regional inertia, a stability margin index (SMI) is introduced based
on rotor angle distance from its maximum static stability margin. It is tried to proof this via investigating the
effect of inertia distribution on changing the location and the sensitivity of system poles and zeroes. The
system transient stability in case of uneven inertia distribution is studied and explained by implementing the
direct methods and transient energy function. For a SMIB system, it is proved that the critical clearing time
is directly depended to the generator inertia by its square root. This approach is further developed for a
three-machine test system and it was shown that for the system to be stable in a 3-phase fault, a required
inertia distribution should be presented. However, due to some computational limitations of direct methods
when using on large systems, this method needs some extra studies and investigations for practical use.
However, the effect of inertia distribution is studied mathematically, but still the important question is
developing an approach to establish a criterion to determine the required inertia in the system and to assess
the effect of inertia distribution on system stability. This is the subject of the next step of the project.
0
1
2
3
4
5
6
7
8
9
0 2 4 6 8 10
G3
Iner
tia
(s)
G2 Inertia (s)
Inertia distribution in G2 and G3

Local Inertia Understanding the impact of the distribution of inertial response First Phase, Step 2, Deliverable D2.1
35
4. References [1] J. Machowski, J. Bialek, and J. Bumby, Power System Dynamics: Stability and Control, Wiley, 2011.
[2] M. Persson, “Frequency Response by Wind Farms in Power Systems with High Wind Power Penetration”,
PHD Thesis, Dep. of Electrical Engineering, Chalmers University of Technology, Gothenburg, Sweden, 2017
[3] P. kundur, Power System Stabilty and Control, EPRI, 1993
[4] S. Eftekharnejad, V. Vittal, G. T. Heydt, et al., “Small Signal Stability Assessment of Power Systems with
Increased Penetration of Photovoltaic Generation: A Case Study”, IEEE Trans. Sustain. Energ., vol. 4, no. 4,
pp. 960-967, October 2013
[5] J.L. Rueda and F. Shewarega, “Small Signal Stability of Power System with Large Scale Wind Power
Integration”, Cigre 10th regional meeting on Systems Development and Economics, 24-28 May, Puerto Iguazú,
Argentina, 2009
[6] https://courses.engr.illinois.edu/ece486/fa2017/documents/lecture_notes/effects_zero_pole.pdf
[7] J. D. Glover, “Power System Analysis and Design”, Fifth edition, 2012
[8] T. Smed, “Feasible eigenvalue sensitivity for large power systems”, IEEE Trans. Power Syst., vol. 8, no. 2,
pp. 555–561, May 1993.
[9] P. Cuffe, and A. Keane, “Visualizing the Electrical Structure of Power Systems”, IEEE Systems Journal, Vol.
11, No. 3, pp. 1821-1821, September 2017
[10] S. Arianos, E. Bompard, A. Carbone, and F. Xue, “Power grid vulnerability: A complex network approach,”
Chaos—Interdisc. J. Nonlin. Sci., vol. 19, no. 1, Mar. 2009, Art. ID. 013119.
[11] E. Cotilla-Sanchez, P. D. H. Hines, C. Barrows, S. Blumsack, and M. Patel, “Multi-attribute partitioning of
power networks based on electrical distance,” IEEE Trans. Power Syst., vol. 28, no. 4, pp. 4979–4987, Nov.
2013.
[12] G.A. Maria, C. Tang, and J. Kim, “Hybrid transient stability analysis (power systems)”, IEEE Transactions
on Power Systems, Vol. 5, No. 2, May 1990