Embed Size (px)
DESCRIPTION
project
Citation preview
DEPARTMENT OF MATHEMATICS
ST.THOMAS’ COLLEGE
Thrissur 680001, Thrissur District, Kerala state
TEL-0487 2420435, FAX-0487 2421510 [email protected]
CERTIFICATE
Certified that this project report titled “NUMERICAL METHODS OF SOLVING
PARTIAL DIFFERENTIAL EQUATIONS’’ submitted by LINTU RAJ Reg No.
THAMMMS011, to the university of Calicut, in partial fulfillment of the requirement
for the Degree of Master of Science in Mathematics, is a bonafide work undertaken
by her under our supervision during the year 2013-2014.
PROJECT SUPERVISOR HEAD OF DEPARTMENT
Prof. SABU A.S Dr .P.L Antony
Assistant Professor Associate Professor
THRISSUR
DECLARATION
I LINTU RAJ,Re.No-THAMMMS011, do here by declare that the project
entitled “NUMERICAL METHODS FOR SOLVING PARTIAL DIFFERENTIAL
EQUATIONS’’ to the Department of Mathematics, St. Thomas’ College Thrissur, is
an original dissertation done by me under the supervision of Prof. SABU A.S.
Assistant Professor of Mathematics Department of St.Thomas’ College, Thrissur.
THRISSUR LINTU RAJ
Reg No: THAMMMS011
ACKNOWLEDGEMENT
This is project which is prepared in the light of my interest in Partial
differential equations concentrating on the topic entitled “ NUMERICAL
METHODS FOR SOLVING PARTIAL DIFFERENTIAL EQUATIONS .’’ Firstly
I thank GOD almighty for the holy support given to me throughout the work of
the project . It is my proud privilege to express my sincere gratitude and deep
indebtedness to the people who helped me to complete the project work successfully
I am deeply grateful to our principal Dr. JENSON P. O for providing all the
facility to do this project.
I am indebted to Dr. P. L ANTONY(Head of the Department of mathematics
St.Thomas’ College, Thrissur ),for encouragement in carrying out this project and
also for the facilities provided to us.
I would like to express our sincere gratitude to Mr. SABU A.S. (Assistant
Professor, Department of Mathematics) for his valuable advices and whole hearted
cooperation in the fulfillment of my project.I express my sincere thanks gratitude to
all faculty of the Department and to librarians of our college who helped me
referring the related books. And of course, I thank all my classmates and my family
for their sincere co-operation.
LINTU RAJ

CONTENT
CHAPTER 1 ……………………………………………………. 1
INTRODUCTION
CHAPTER 2 …………………………………………. ……….. 2
PRELIMINARIES
CHAPTER 3 …………………………………………………..... 9
NUMERICAL METHODS FOR SOLVING
PARTIAL DIFFERENTIAL EQUATIONS
CHAPTER 4 …………………………………………………… 31
APPLICATIONS
BIBLIOGRAPHY……………………………………………. …..35
CHAPTER 1
INTRODUCTION
Partial differential equation arise in the study of many branches of
applied mathematics , for example fluid dynamics , heat transfer, boundary layer
flow, elasticity, quantum mechanics and electromagnetic theory. Only a few of these
equations can be solved by analytical method which are also complicated requiring
use of advanced mathematical techniques. In most of these cases it is easier to
develop approximate solutions by numerical methods . Of all the numerical methods
available for the solutions of partial equations, the method of finite difference is
most commonly used. In this method, the derivative appearing in the equations
and the boundary conditions are replaced by their finite difference approximations.
Then the given equations is changed to a system of linear equations which are
solved by iterative procedure. This process is slow but procedure good result in
many boundary value problem.
An added advantage of this method is that the
computation can be carried by electronic computers . To accelerate the solution
sometimes the method of relaxation proves quite effective. The another methods for
the numerical solutions of partial differential equations are finite element method,
finite volume method, spectral method, mesh free method, domain decomposition
method, multi grid method, methods of lines, etc.
[1]
CHAPTER 2
PRELIMINARIES
PARTIAL DIFFERENTIAL EQUATIONS
By a partial differential equations (P.D.E) we mean an equation of the form
f( x,y,t,……..,Ѳx,Ѳy……,Ѳxy,…..)=0 involving two or more independent variables
x,y,t,… etc one independent variable Ѳ(x,y,t,…) € Cn
in some domain D and its
partial derivatives Ѳx, Ѳy,….. , Ѳxx , Ѳyy , Ѳxy, …. Where Cn denote a set of
functions possessing continuous partial derivatives of order n. A partial differential
equation is thus a reletion between the dependent variable Ѳ and some of partial
derivatives at every point (x,y,t,…..) in D . A partial differential equation is an
equation that involves an unknowen function (the dependent variable) and some of
its partial derivatives with respect to two or more independent variable . An nth
order equation has the heighest order derivative of order n.
Second Order Partial Differential Equations
A partial differential equation is said to be second order semi linear partial
differential equation if it can be put in the form
R(x,y) Uxx+ S(x,y) UXY+ T(x,y) UYY+ g(x,y,U,Ux,Uy) = 0
Where , R2+S
2+T
2 ≠0 and R ,S and T are continuous .
[2]

Classical Equations of Mathematical Physics
1. Laplace equation (The potential equation)
2 =0
In cartesian coordinates , the vector operator Laplace del is defined as
= ex x
+ ey
y
+ ez
z
2 is refered as the Laplacian operator and given by
2
= . = 2
2
x
+
2
2
y
+
2
2
z
Thus Laplace equation in cartesian co-ordinates is
2
2
x
+
2
2
y
+
2
2
z
= 0
Laplace equation arises in incompressible fluid flow , gravitational
potential problems , electrostatics , magnetostics , study state heat conduction with
no source and torsion of bars in elasticity. Function which satisfies Laplace
equation are referred to as harmonic functions.
2. Poisson’s Equation
Ф2
+ g = 0
This equation arises in study state heat conduction with distributed sources
( = temperature) and tostion of bar in elasticity (in which case (x,y) is
the stress functions ).
[3]

3. Wave Equation
2 = 1/C
2
In this equations , dots denotes time derivatives ,
= 2
2
t
And C is the speed propagation.
4. Helmhotlz Equations ( Reduced wave equations)
2 = k
2 = 0
The Helmholtz Equation is the time harmonic form of the wave equations,
in
which interest is restricted to function which vary sinusoidally in time . To
obtain
the Heimholtz equation we substitute ,
(x,y,z,t) = (x,y,z) cos t
In to wave equation ,
2 0 cos t =
2/C
2 0 cos t
We define the wave number k = 2/c this equation becomes
2 0 + k
2 0 = 0
With the understanding that the unknown depends only on the special variables , the
subscript is unnecessary and we obtain the Helmholtz equation
2 = k
2 = 0 .
[4]

This equation arises in steady state saturation involving the wave equation .
For example :- steady state acoustics.
5. Heat Equation
. (k ) + Q = c
In this equation represents the temperature T, K is the thermal conductivity , Q
is the internal heat generation per unit volume per unit time , is the material
density , and c is the material specific heat .
Classification of Partial Differential Equations
The classical partial differential equation summarized above involves
time and some don’t , so presumably their solution would exhibit fundamental
differences . Of those that involves time (wave and heat equation ) , the order of
the time derivative is different , so the fundamental character of their solutions may
also differ . Both these speculations out to be true .
Consider the general , second order linear partial differential equation
in two variables ,
A Uxx + B Uxy + C Uyy + D Ux + E Uy + F U = G
Where the coefficients are functions of the independent variables x and y (ie , A =
A(x,y) , B = B(x,y) , C = C(x,y) etc ) and we have used subscript to denote
partial derivatives
Eg :- Uxx = x
u
[5]

The quantity B2 - 4AC is referred to as the discriminant of the equation . The
behavior of the solution of equation A Uxx + B Uxy + C Uyy + D Ux + E Uy +F
U = G
Deppends on the sign of discriminant according to the following table
B2 – 4AC Equation Type Typical Physical Described
< 0 Elliptic Steady state phenomenon
= 0 Parabolic Heat flow and diffusion
process
>0 Hyperbolic Vibrating system and wave
motion.
The names elliptic , parabolic , hyperbolic arise from the analogy with the conic
section in analytic geometry.
Given these definitions we can easily classify the common equations of mathematical
physics already encountered as follows:-
Name Equation Equation in
two variable
A , B , C Type
Laplace
equation
2 = 0 Uxx + Uyy = 0 A = C = 1
B = 0
Elliptic
[6]

Poissons
equation
2 + g = 0 Uxx + Uyy = -
g
A = C = 1
B = 0
Elliptic
Wave equation 2 = 1/c
2
Uxx –Uyy/c2 A=1 C= -1/c
2
B = 0
Hyperbolic
Helmholtz
equation
2 + k
2
=0
Uxx + Uyy +
k2 U=0
A= C =1 ,B =
0
Elliptic
Heat equation (k ) +
Q = C
kUxx - C
Uyy = -Q
A =k , B=C=0 Parabolic
In the wave and heat equation in the above table “ y ’’ represents
the time variable. The behavior of the solution of equation of different types differs.
Elliptic equation characteristic ( time independent) situation and other two types of
equations characterize time dependent situation.
In the study of partial differential equations, usually three types of
problems arise :
(i) Drichlet’s Problem
(ii) Cauchy’s Problem
(iii) ill-posed Problem
[7]

In Dirichlet’s problem , given a continuous function f on the
boundary C of a region R , to find a fuction u satisfying the Laplace equation in R
, that is find u such that :
uxx + uyy = 0 in R
u = f of C
In Cauchy’s problem ,
utt – uxx = 0 for t > 0
u (x,0) = f(x)
ut (x,0) = g(x)
and
f(x) and g(x) are being arbitrary.
In ill-posed or well- posed problem ,
ut – ux = 0 for t > 0
u (x,0) = f(x)
At this juncture, it is, however, important to mention a point of difference between
ordinary and partial differential equations is always connected with a particular type
of associated conditions. Thus, the problem of Laplace’s equation with Cauchy’s
boundary conditions, viz., the problem defined by
uxx + uyy = 0
u(x,0) = f(x)
uy(x,0) = g(x)
and is an ill-posed problem.
[8]

CHAPTER 3
NUMERICAL METHODS FOR SOLVING PARTIAL
DIFFERENTIAL EQUATIONS
Partial differential equations occur in many branches of applied
mathematics , for example hydrodynamics, elasticity, quantum mechanics and
electromagnetic theory. The analytical treatment of these equations is a rather
involved process and requires application of advanced mathematical methods. On the
other hand, it is generally easier to produce sufficiently approximate solution by
simple and efficient numerical methods. There are so many numerical methods for
solving P.D.E. Some of them are discussed below…
(i) Finite Difference Method :
In this method, the derivatives appearing in the differential equation
and the boundary conditions are replaced by their finite difference approximation
and the resulting linear system of equations are solved by any standard procedure .
These roots are the values of the required solution of the pivotal points.
Consider a rectangular region R in the X-Y plane. Dived this region
in to the rectangular region network of side ∆ x = h and ∆ y = k as show in the
following figure. The point of intersection of the dividing lines are called mesh
points, nodal points or the grid points.
[9]
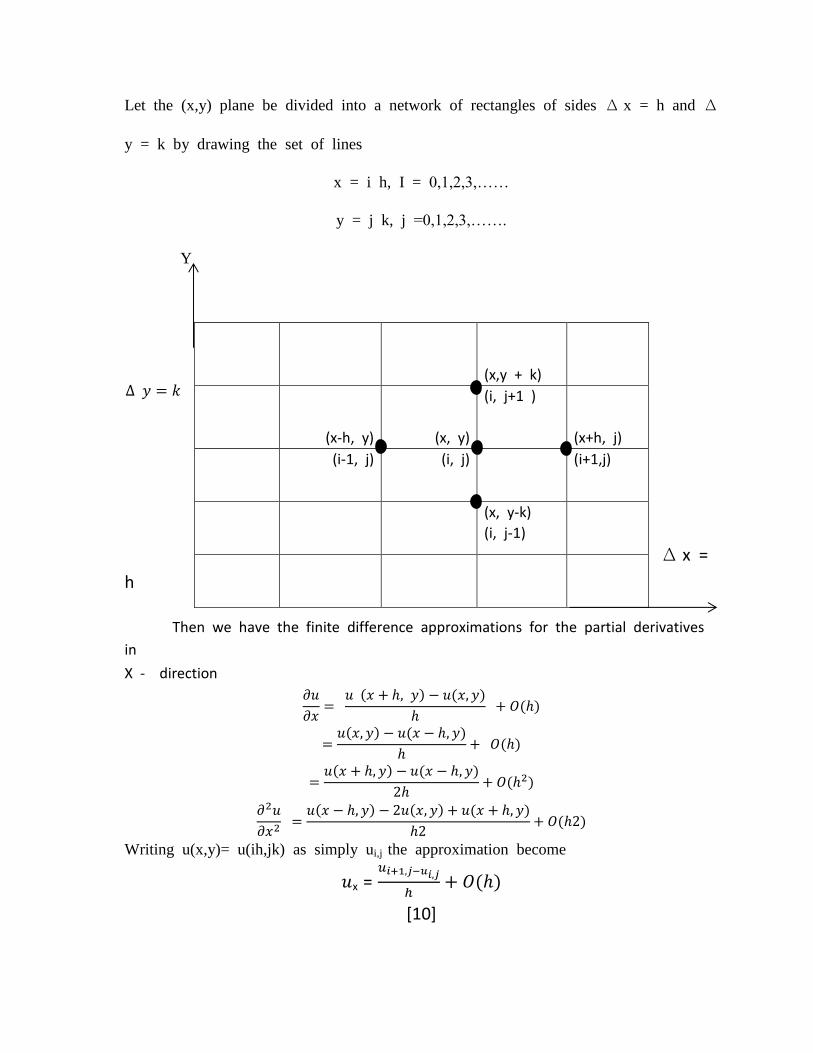
Let the (x,y) plane be divided into a network of rectangles of sides ∆ x = h and ∆
y = k by drawing the set of lines
x = i h, I = 0,1,2,3,……
y = j k, j =0,1,2,3,…….
Y
∆ x =
h
Then we have the finite difference approximations for the partial derivatives
in
X - direction
( ) ( )
( )
( ) ( )
( )
( ) ( )
( )
( ) ( ) ( )
( )
Writing u(x,y)= u(ih,jk) as simply ui,j the approximation become
x =
( )
[10]
(x,y + k)
(x-h, y)
(x, y)
(i, j+1 )
(x+h, j)
(i-1, j) (i, j) (i+1,j)
(x, y-k)
(i, j-1)

=
( )
u =
( )
and uxx =
( )
Similarly we have the approximations for the derivatives with respect to y.
=
( )
=
( )
=
( )
and uyy =
( )
We can use the following methods for iteration
(i) Jacobi’s method : Denoting the nth
derivative value of u(n)
i,j the iterative
formula to solve the partial differential equation is
It gives improved value of ui,j at the interior mesh points and is called the
point Jacobi’s formula.
(ii) Gauss – Seidal Method : In this method the iteration formula is
[11]
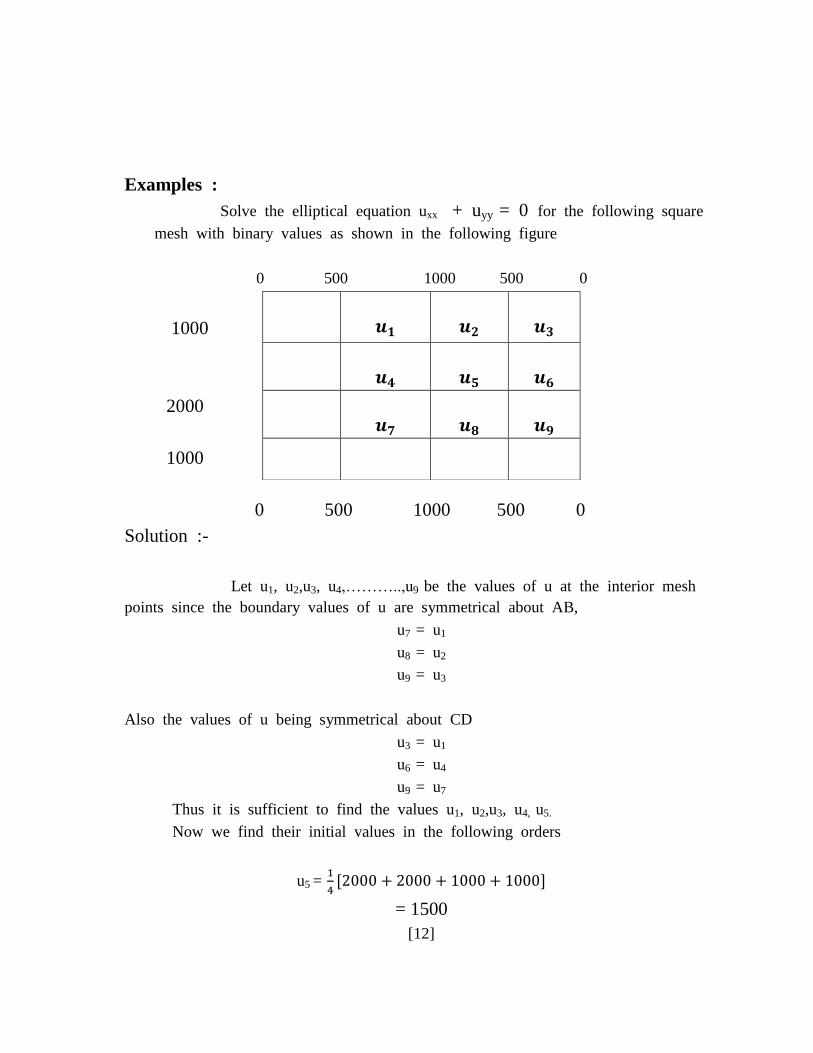
Examples :
Solve the elliptical equation uxx + uyy = 0 for the following square
mesh with binary values as shown in the following figure
0 500 1000 500 0
1000
2000
1000
0 500 1000 500 0
Solution :-
Let u1, u2,u3, u4,………..,u9 be the values of u at the interior mesh
points since the boundary values of u are symmetrical about AB,
u7 = u1
u8 = u2
u9 = u3
Also the values of u being symmetrical about CD
u3 = u1
u6 = u4
u9 = u7
Thus it is sufficient to find the values u1, u2,u3, u4, u5.
Now we find their initial values in the following orders
u5 =
= 1500
[12]
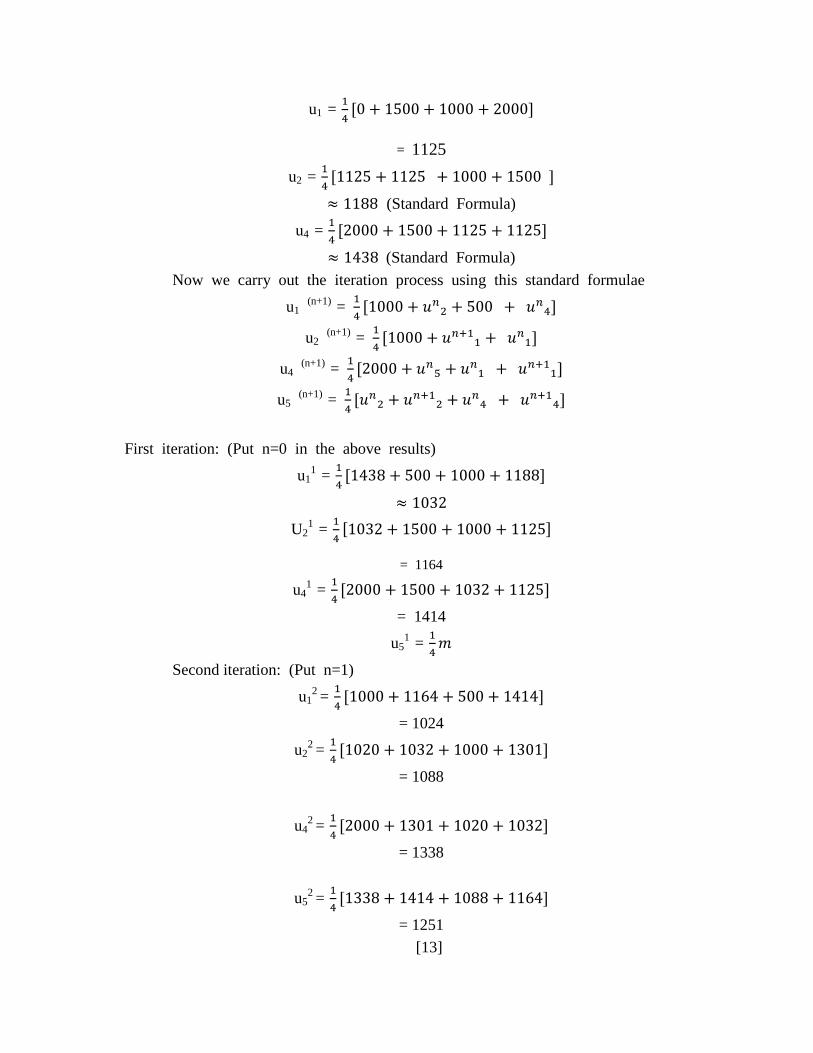
u1 =
= 1125
u2 =
(Standard Formula)
u4 =
(Standard Formula)
Now we carry out the iteration process using this standard formulae
u1 (n+1)
=
u2 (n+1)
=
u4 (n+1)
=
u5 (n+1)
=
First iteration: (Put n=0 in the above results)
u11 =
U21
=
= 1164
u41 =
= 1414
u51 =
Second iteration: (Put n=1)
u12 =
= 1024
u22 =
= 1088
u42 =
= 1338
u52 =
= 1251
[13]
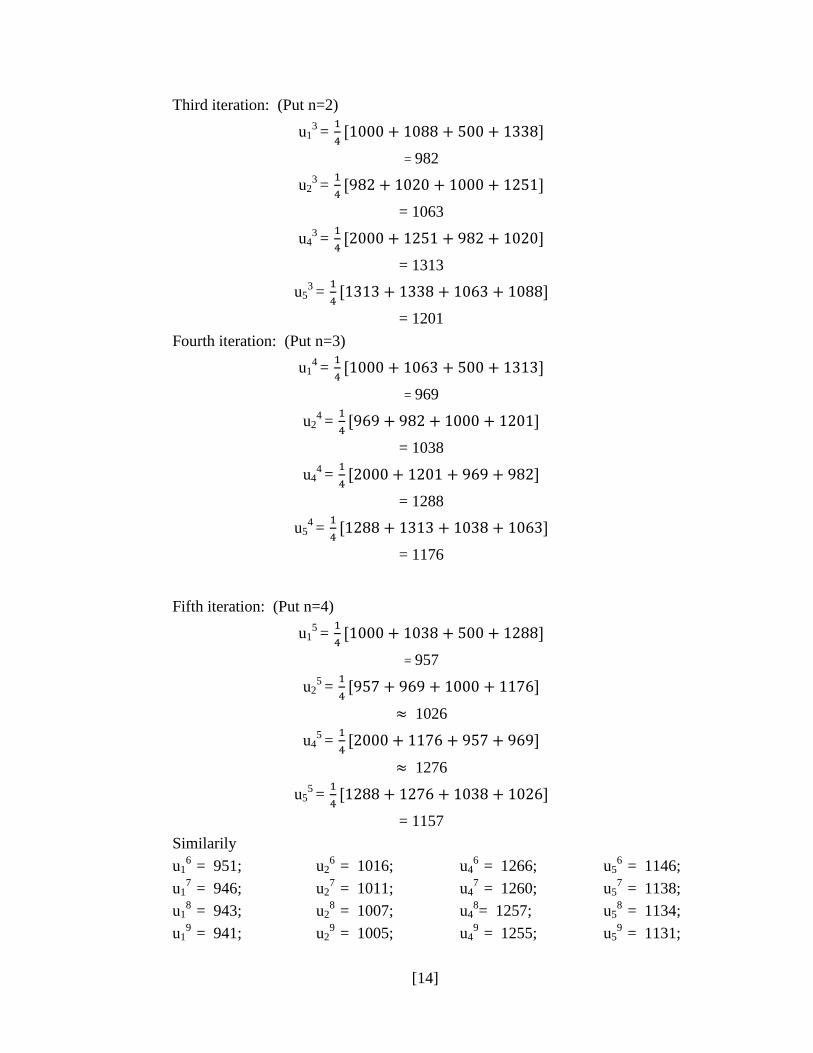
Third iteration: (Put n=2)
u13 =
= 982
u23 =
= 1063
u43 =
= 1313
u53 =
= 1201
Fourth iteration: (Put n=3)
u14 =
= 969
u24 =
= 1038
u44 =
= 1288
u54 =
= 1176
Fifth iteration: (Put n=4)
u15 =
= 957
u25 =
1026
u45 =
1276
u55 =
= 1157
Similarily
u16 = 951; u2
6 = 1016; u4
6 = 1266; u5
6 = 1146;
u17 = 946; u2
7 = 1011; u4
7 = 1260; u5
7 = 1138;
u18 = 943; u2
8 = 1007; u4
8= 1257; u5
8 = 1134;
u19 = 941; u2
9 = 1005; u4
9 = 1255; u5
9 = 1131;
[14]

u110
= 940; u210
= 1003; u410
= 1253; u510
= 1129;
u111
= 939; u211
= 1002; u411
= 1252; u511
= 1128;
u112 939; u2
12 1001; u412 1251; u5
12 1126;
There is negligible difference between the values obtained in the 11th
and 12th
iterations. Hence,
u1 = 939;
u2 = 1001;
u4 = 1251;
u5 = 1126;
Examples :
Given the values of u(x,y) on the boundary of the square in the
following figure evaluate the function u(x,y) satisfying the Laplace equation
at the pivotal points of the figure by a) Jacobi’s Method b) Gauss –
Seidal Method
Solution :-
Let u1, u2,u3, u4 be the initial values
We assume that u4 = 0; Then
u1 =
= 1000
u2 =
= 625(Standard Formula)
u3 =
(Standard Formula)
[15]
u1
u2
u3
u4

u4 =
(Standard Formula)
a) Now we carry out the successive iteration process using this Jacobi’s
formulae
u1 (n+1)
=
u2 (n+1)
=
u3 (n+1)
=
u4 (n+1)
=
First iteration: (Put n=0 in the above results)
u11 =
U21
=
u31 =
Second iteration : (Put n=1)
u12 =
= 1172
u22 =
= 750
u32 =
= 1000
u42 =
= 422
Similarly,
u13 1188; u2
3 774; u43 1024; u5
3 438;
u14 1200; u2
4 782; u44 1032; u5
4 450;
u15 1204; u2
5 788; u45 1038; u5
5 454;
u16 1206.5; u2
6 790; u46 1040; u5
6 456.5;
[16]

u17 1208; u2
7 791; u47 1041; u5
7 458;
u18 1208; u2
8 791.5; u48 1041.5; u5
8 458;
There is negligible difference between the values obtained in the 7h
and 8th
iterations. Hence,
u1 = 1208;
u2 = 792;
u4 = 1042;
u5 = 458;
b) We carry out the successive iterations, using Gauss-Seidal formulae
u1 (n+1)
=
u2 (n+1)
=
u3 (n+1)
=
u4 (n+1)
=
First iteration: (Put n=0 in the above results)
u11 =
u21 =
u31 =
u41 =
438
Second iteration : (Put n=1)
u12 =
u22 =
u32 =
[17]

u42 =
Similarly,
u13 1204; u2
3 789; u43 1040; u5
3 458;
u14 1207; u2
4 791; u44 1041; u5
4 458;
u15 1208; u2
5 791.5; u45 1041.5; u5
5 458.25;
There is negligible difference between the values obtained in the 4th
and 5th
iterations. Hence,
u1 = 1208;
u2 = 792;
u4 = 1042;
u5 = 458;
(ii) Method of lines
The method of lines is a technique for solving partial differential equations in
which all but one dimension is discretized. Method of lines allow standard, general
–purpose methods and software, developed for the numerical integration of ordinary
differential equation and differential algebraic equations, to be used.
The method of lines most often refers to the construction or analysis of numerical
methods for partial differential equations that proceeds by first discretizing the spatial
derivatives only and leaving the time variable continuous. This leads to a system of
ordinary differential equations to which a numerical methods for initial value
ordinary equations
can be applied.
[18]
(iii ) Domain decomposition methods
Domain decomposition method solve a boundary value problem by splitting it
into smaller boundary value problems on subdomains and iterating to coordinating
the solution between adjacent subdomains. A coarse problem with one or few
unknowns per sub domains is used to further coordinate the solutions between
the subdomains the subdomains globally. The domain problem on the subdomains
are independent , which make domain decomposition methods suitable for parallel
computing. Domain decomposition method is typically used as pre conditioners
for Krylo space iterative method , such as conjugate gradient method.
In overlapping domain decomposition methods , the subdomain overlapped by
more than the interface. Overlapping domain decomposition methods include the
Schwarz alternating method and additive Schwarz method. Many domain
decomposition methods can be written and analyzed as a special case of the
abstract additive Schwarz method
In non-overlapping domain decomposition methods the subdomains intersect
only on their interface. In primal methods, such as Balancing domain
decomposition and the continuity of the solution across subdomains interface is
enforced by representing the
value of the solution on all neighboring subdomains by the same unknowns. In
duel
method , the continuity of the solution across the subdomains interface is
enforced by Lagrange multipliers . Non-overlapping domain decomposition method
are also called iterative substructuring methods.
Domain decomposition methods embody large potential for a parallelization of
the finite element method , and serve a basis for distributed , parallel
computations.
[19]
Example :
u’’
(x) - u (x) = 0
u (0) = 0 ; u(1) = 1
The exact solution is:
u (x) = (ex - e
x) / (e
1 – e
-1)
Subdivide the domain into two subdomains, one from[0,1/2] and another from [1/2,1]. In
each of these two subdomains define interpolating functions v1(x)and v2(x)At the interface
between these two subdomains the following interface conditions shall be imposed:
v1(1/2) = v2(1/2)
v1’(1/2) = v2’(1/2)
Let the interpolating functions be defined as:
v1(x) = ∑ un Tn (y1(x))
v2(x) = ∑ un + N Tn (y2(x))
Where Tn (x) is the nth cardinal function of the Chebyshev polynomials of the first kind
with input argument y.
If N=4 then the following approximation is obtained by this scheme:
u1 = 0.6236
u2 = 0.21495
u3 = 0.37428
u4 = 0.44341
u5= 0.51492
u6 = 0.69972
u7 = 0.90645
(iv) Finite element method
The finite element method (FEM) is a numerical technique for finding approximate
solutions to boundary value problems for differential equations. It uses variational
methods (the calculus of variations) to minimize an error function and produce a
stable solution. Analogous to the idea that connecting many tiny straight lines can
approximate a larger circle, FEM encompasses all the methods for connecting many
simple element equations over many small subdomains, named finite elements, to
approximate a more complex equation over a larger domain.
[20]

2D finite element method, the triangles are the elements, the vertices are the nodes.
The finite element method (FEM) has been the tool of choice since its inception in
the 1940s for the simulation of structural mechanics. Today, the FEM is used to
model a much wider range of physical phenomena.
The extended finite element method (XFEM), also known as generalized finite
element method (GFEM) or partition of unity method (PUM) is a numerical
technique that extends the classical finite element method (FEM) approach by
enriching the solution space for solutions to differential equations with discontinuous
functions. The extended finite element method (XFEM) was developed in 1999 by
Ted Belytschko and collaborators,] to help alleviate shortcomings of the finite
element method and has been used to model the propagation of various
discontinuities: strong and weak (material interfaces). The idea behind XFEM is to
retain most advantages of meshfree methods while alleviating their negative sides.
The extended finite element method was developed to ease difficulties in
solving problems with localized features that are not efficiently resolved by mesh
refinement. One of the initial applications was the modeling of fractures in a
material. In this original implementation, discontinuous basis functions are added to
standard polynomial basis functions for nodes that belonged to elements that are
intersected by a crack to provide a basis that included crack opening displacements.
A key advantage of XFEM is that in such problems the finite element mesh does
not need to be updated to track the crack path. Subsequent research has illustrated
the more general use of the method for problems involving singularities, material
interfaces, regular meshing of microstructural features such as voids, and other
problems where a localized feature can be described by an appropriate set of basis
functions.
Enriched finite element methods extend, or enrich, the approximation space
so that it is able to naturally reproduce the challenging feature associated with the
problem of interest: the discontinuity, singularity, boundary layer, etc. It was shown
that for some problems, such an embedding of the problem's feature into the
approximation space can significantly improve convergence rates and accuracy.
Moreover, treating problems with
[21]

discontinuities with extended Finite Element Methods suppresses
the need to mesh and re mesh the discontinuity surfaces, thus alleviating the
computational costs and projection errors associated with conventional finite element
methods, at the cost of restricting the discontinuities to mesh edges.
Example:
Solving Poisson’s equation in one dimesion
-Uxx = q , 0 ≤ x ≤ L
using finite element method:
soln:
We consider Dirichlet boundary conditions:
U(0) = U(L) = 0.
A weak solution of - Uxx = q ,
considers the variational form of the above equation:
∫ ( ) ∫ ( )
( )
[22]

where (x) satisfy the boundary conditions:
(0) = (L) = 0.
We can integrate the first term by parts:
∫
( ) (x) ( ) } at x=0 to x =L
using ( ) ( ) .
Then ∫ ( ) ∫ ( )
( ) become ,
∫ ( ) ∫ ( )
( )
The above equation hold for all functions ( ) which are piece-wise continuous
and satisfies the bc : (0) = (L) = 0.
To solve equation
∫ ( ) ∫ ( )
( )
using the finite element method we again introduce a mesh on the interval [0, L]
with mesh points xj = j x , j = 0, . . . , n + 1 where, x =
.
To complete the discretisation we must choose a basis for (x).
The most common basis chosen for _(x) are the “hat” functions, j(x).
We solve ∫ ( ) ∫ ( )
( ) using these :
( ) ∑
( )
where,
( )
{
( )
( )
otherwise the value is zero.
with this construction :
( )
{
, zero otherwise..
[23]
We let (x) =∑ ( ) and (xi) = ai for i = 1, . . . , n, and (0) = ( )
= 0 and
( ) = (L) so that ( ) satisfies boundary conditions.
The hat functions are advantageous as a basis as they are nearly “orthonormal”,
ie , ∫ ( )
( )(x)dx = 0 when |j − k| > 1.
Using finite element method we seek an approximate solution which is satisfied
for
all basis functions, i(x), for i = 1, . . . , n:
∫ ( ) ∫ ( )
( )
; i=1,2,…..,n We
also expand the solution U(x) using the hat function as a basis :
U(x) =Uh(x)=∑ ( )
this simplifies our equation and we can solve for ; i=1,2,…..,n.
(v) Spectral Method
Spectral methods are a class of techniques used in applied mathematics and
scientific computing to numerically solve certain differential equations, often
involving the use of the Fast Fourier Transform. The idea is to write the solution of
the differential equation as a sum of certain "basis functions" (for example, as a
Fourier series which is a sum of sinusoids) and then to choose the coefficients in
the sum in order to satisfy the differential equation as well as possible.
Spectral methods and finite element methods are closely related and built on
the same ideas; the main difference between them is that spectral methods use basis
functions that are nonzero over the whole domain, while finite element methods use
basis functions that are nonzero only on small subdomains. In other words, spectral
methods take on a global approach while finite element methods use a local
approach. Partially for this reason, spectral methods have excellent error properties,
with the so-called "exponential convergence" being the fastest possible,
[24]
when the solution is smooth. However, there are no known three-dimensional
single domain spectral shock capturing results. In the finite element community, a
method where the degree of the elements is very high or increases as the grid
parameter h decreases to zero is sometimes called a spectral element method.
Spectral methods can be used to solve ordinary differential equations (ODEs),
partial differential equations (PDEs) and eigenvalue problems involving differential
equations. When applying spectral methods to time-dependent PDEs, the solution is
typically written as a sum of basis functions with time-dependent coefficients;
substituting this in the PDE yields a system of ODEs in the coefficients which can
be solved using any numerical method for ODEs. Eigenvalue problems for ODEs are
similarly converted to matrix eigenvalue problems.
Spectral methods were developed in a long series of papers by Steven Orszag
starting in 1969 including, but not limited to, Fourier series methods for periodic
geometry problems, polynomial spectral methods for finite and unbounded geometry
problems, pseudo spectral methods for highly nonlinear problems, and spectral
iteration methods for fast solution of steady state problems. The implementation of
the spectral method is normally accomplished either with collocation or a Galerkin
or a Tau approach.
Spectral methods are computationally less expensive than finite element
methods, but become less accurate for problems with complex geometries and
discontinuous coefficients. This increase in error is a consequence of the Gibbs
phenomenon.
Example :
Here we presume an understanding of basic multivariate calculus and Fourier
series. If g(x,y) is a known, complex-valued function of two real variables, and g is
periodic in x and y (that is, g(x,y)=g(x+2π,y)=g(x,y+2π)) then we are interested in
finding a function f(x,y) so that
(
+
)f(x,y) = g(x,y) for all x,y.
where the expression on the left denotes the second partial derivatives of f in x and
y, respectively. This is the Poisson equation, and can be physically interpreted as
some sort of heat conduction problem, or a problem in potential theory, among other
possibilities.
If we write f and g in Fourier series:
f = ∑ ( )
[25]

g =∑ ( )
and substitute in to the difference equation , obtain this equation :
We have exchanged partial differentiation with an infinite sum, which is
legitimate if we assume for instance that f has a continuous second derivative. By
the uniqueness theorem for Fourier expansions, we must then equate the Fourier
coefficients term by term, giving
which is an explicit formula for the Fourier coefficients aj,k.
With periodic boundary conditions, the Poisson equation possesses a solution
only if b0,0 = 0. Therefore we can freely choose a0,0 which will be equal to the
mean of the resolution. This corresponds to choosing the integration constant.
To turn this into an algorithm, only finitely many frequencies are solved for.
This introduces an error which can be shown to be proportional to , where
and is the highest frequency treated.
(vi) Mesh Free Methods
In the field of numerical simulation methods, meshfree methods are those that do not
require that a mesh connect data points of the simulation domain. Meshfree methods enable
the simulation of some otherwise difficult types of problems, at the cost of extra computing
time and programming effort.
Numerical methods such as the finite difference method, finite-volume method, and
finite element method were originally defined on meshes of data points. In such a mesh,
each point has a fixed number of predefined neighbors, and this connectivity between
neighbors can be used to define mathematical operators like the derivative. These operators
are then used to construct the equations to simulate—such as the Euler equations or the
Navier–Stokes equations.But in simulations where the material being simulated can move
around (as in computational fluid dynamics) or where large deformations of the material can
occur (as in simulations of plastic materials), the connectivity of the mesh can be difficult to
maintain without
[26]

introducing error into the simulation. If the mesh becomes tangled or degenerate during
simulation, the operators defined on it may no longer give correct values. The mesh may be
recreated during simulation (a process called remeshing), but this can also introduce error,
since all the existing data points must be mapped onto a new and different set of data points.
Meshfree methods are intended to remedy these problems. Nodal integration has been
proposed as a technique to use finite elements to emulate a meshfree behaviour.[1]
However,
the obstacle that must be overcome in using nodally integrated elements is that the quantities
at nodal points are not continuous, and the nodes are shared among multiple elements.
Meshfree methods are also useful for:
Simulations where creating a useful mesh from the geometry of a complex 3D object
may be especially difficult or require human assistance
Simulations where nodes may be created or destroyed, such as in cracking
simulations
Simulations where the problem geometry may move out of alignment with a fixed
mesh, such as in bending simulations
Simulations containing nonlinear material behavior, discontinuities or singularities
Example
In a traditional finite difference simulation, the domain of a one-dimensional
simulation would be some function u (x,t), represented as a mesh of data values uin
at points
xi, where
I = 0,1,2,………………….
n = 0,1,2,…………………
xn+1 -xi = h for every i
tn+1-tn = k for every k
We can define the derivatives that occur in the equation being simulated using some
finite difference formulae on this domain, for example
(ui+1
n _ ui-1
n )/ 2h
and
= (ui
n+1 – ui-1
n) / k
Then we can use these definitions of u (x,t) and its spatial and temporal derivatives
to write the equation being simulated in finite difference form, then simulate the equation
[27]

with one of many finite difference methods.
In this simple example, the spatial step size h and the temporal step size kare
constant, and the left and right mesh neighbors of the data value at are the values at
xi-1and xi+1 , respectively. But if the values can move around, or can be added to or removed
from the simulation, that destroys the spacing and the simple finite difference formulae for
derivatives is no longer correct.
Smoothed-particle hydrodynamics (SPH), one of the oldest meshfree methods,
solves this problem by treating data points as physical particles with mass and density that
can move around over time, and carry some value with them. SPH then defines the value
of u (x,t)between the particles by
u (x,t) = ∑ mi (uin/ϸi) W (/x - xi/)
where mi is the mass of particle , is the density of particle i , and W is a kernel function
that operates on nearby data points and is chosen for smoothness and other useful qualities.
By linearity, we can write the spatial derivative as
∑ mi (ui
n/ϸi)
W (/x - xi/)
Then we can use these definitions of u (x,t) and its spatial derivatives to write the
equation being simulated as an ordinary differential equation, and simulate the equation with
one of many numerical methods. In physical terms, this means calculating the forces
between the particles, then integrating these forces over time to determine their motion.
The advantage of SPH in this situation is that the formulae for u (x,t) and its
derivatives do not depend on any adjacency information about the particles; they can use the
particles in any order, so it doesn't matter if the particles move around or even exchange
places.
One disadvantage of SPH is that it requires extra programming to determine the
nearest neighbors of a particle. Since the kernel function W only returns nonzero results for
nearby particles within twice the "smoothing length" (because we typically choose kernel
functions with compact support), it would be a waste of effort to calculate the summations
above over every particle in a large simulation. So typically SPH simulators require some
extra code to speed up this nearest neighbor calculation.
(vii) Multigrid method
Multigrid (MG) methods in numerical analysis are a group of algorithms for solving
differential equations using a hierarchy of discretizations. They are an example of a class of
techniques called multiresolution methods,
[28]
very useful in (but not limited to) problems exhibiting multiple scales of behavior.
For example, many basic relaxation methods exhibit different rates of convergence
for short- and long-wavelength components, suggesting these different scales be treated
differently, as in a Fourier analysis approach to multigrid. MG methods can be used as
solvers as well as preconditioners.
The main idea of multigrid is to accelerate the convergence of a basic iterative
method by global correction from time to time, accomplished by solving a coarse problem.
This principle is similar to interpolation between coarser and finer grids. The typical
application for multigrid is in the numerical solution of elliptic partial differential equations
in two or more dimensions.
Multigrid methods can be applied in combination with any of the common
discretization techniques. For example, the finite element method may be recast as a
multigrid method. In these cases, multigrid methods are among the fastest solution
techniques known today. In contrast to other methods, multigrid methods are general in that
they can treat arbitrary regions and boundary conditions. They do not depend on the
separability of the equations or other special properties of the equation. They have also been
widely used for more-complicated non-symmetric and nonlinear systems of equations, like
the Lamé system of elasticity or the Navier-Stokes equations.
There are many variations of multigrid algorithms, but the common features are that a
hierarchy of discretizations (grids) is considered. The important steps are
Smoothing – reducing high frequency errors, for example using a few iterations of
the Gauss–Seidel method.
Restriction – downsampling the residual error to a coarser grid.
Interpolation or prolongation – interpolating a correction computed on a coarser grid
into a finer grid.
A multigrid method with an intentionally reduced tolerance can be used as an
efficient preconditioner for an external iterative solver. The solution may still be
obtained in O (N) time as well as in the case where the multigrid method is used as a
solver. Multigrid preconditioning is used in practice even for linear systems. Its main
advantage versus a purely multigrid solver is particularly clear for nonlinear
problems, e.g., eigenvalue problems.
Generalized multigrid methods
Multigrid methods can be generalized in many different ways. They can be applied
naturally in a time-stepping solution of parabolic partial differential equations, or
they can be applied directly to time-dependent partial differential equations.
Research on multilevel techniques for hyperbolic partial differential equations is
underway.
[29]

Multigrid methods can also be applied to integral equations, or for problems in
statistical physics.
Other extensions of multigrid methods include techniques where no partial
differential equation nor geometrical problem background is used to construct the
multilevel hierarchy. Such algebraic multigrid methods (AMG) construct their
hierarchy of operators directly from the system matrix, and the levels of the
hierarchy are simply subsets of unknowns without any geometric interpretation.
Thus, AMG methods become true black-box solvers for sparse matrices. However,
AMG is regarded as a
dvantageous mainly where geometric multigrid is too difficult to apply.
Another set of multiresolution methods is based upon wavelets. These wavelet
methods can be combined with multigrid methods. For example, one use of wavelets
is to reformulate the finite element approach in terms of a multilevel method.
Adaptive multigrid exhibits adaptive mesh refinement, that is, it adjusts the grid as
the computation proceeds, in a manner dependent upon the computation itself. The
idea is to increase resolution of the grid only in regions of the solution where it is
needed.
[30]

CHAPTER 4
APPLICATIONS
Mathematical Models For Oil Reservoir Simulation
Flow Model
The second part of a reservoir model is a mathematical model that describe
the fluid flow. In the following we will describe the most common model are
isothermal flow. For brevity, we do not discuss thermal and coupled geomechanical
fluid models even though these are sometimes necessary to reprasent first order
effects.
Single Phase Flow
The flow of a single fluid with density through a porous medium
described using the fundamental property of conservation of mass.
( )
( ) …………………….(1)
Here v is the superficial velocity and q denotes a fluid force or sink term
used to model wells. The velocity is related to the fluid pressure , p through an
empirical relation named the French engineer , Henri Darcy:
( ) …………………(2)
Where k is the permeability, the fluid velocity, and g the gravity vector,
introducing rock and fluid compressibilities cr =
and c =
(1) and (2) can
be combined to a parabolic equation for the fluid pressure.
( ) ( )
(
( )) = q …………………..(3)
In the special case of incompressible rock and fluid (3) simplifies to a Poison
equation with variable coefficients. - ( ) =
, for the fluid potential
z .
[31]

Two Phase Flow
The void space in a reservoir will generally be filled by hydrocarbons and
(salt) water . In addition , water is frequently injected to improve hydrocarbon
recovery. If the fluids are immiscible and separated by a sharp interface, they are
referred to as phases. A two phase system is commonly divided into a wetting and
non-wetting phase , given by the contact angle between the solid surface and the
fluid-fluid interface on the microscale (Acute angle implies wetting phase ). On the
macroscale, the fluids are assumed to be present at the same location, and the
volume fraction occupied by each phase is called the saturation of that phase ; For a
two phase system the saturation of the wetting and non-wetting phases therefore
sum to unity Sn+Sw = 1.
In the absence of phase transitions , the saturation change when on phase
displaces the other . During the displacement , the ability of one phase to move is
affected by the interaction with the other phase at the pore scale . In the
microscopic mode l, this affect is represented by the relative permeability krɑ (ɑ = w ,
n) , which is a dimensionless scaling factor that depends on the saturation and
modifies the absolute permeability to account for the rock’s reduced ability to
transmit each fluid in the presence of the other . The multi-phase extension of
Darcy’s law reads
( ) q …………………..(4)
which together with the mass conservation of each phase
( )
+ ( ) ( ) …………………………..(5)
forms the basic equation because of interfacial tension, the pressure in the two face
will differ . The pressure difference is called capillary pressure pcnw = pn - pw and is
usually assumed to be a function of saturation on macro scale .
To better reveal the nature of mathematical model , it is common to
reformulate (4) and (5) as a flow equation for fluid pressure and transport equation
for saturation . A straight forward manipulation leads to a system for one phase
pressure and one saturation in which the capillary pressure appears explicitly . The
resulting equations are nonlinear and strongly coupled. To reduce the coupling , one
can introduce a global pressure , p = pn – pc where we complementary pressure
contains the saturation dependent terms and is defined as . The
dimensionless fractional flow functions fw = ʎw + (ʎw + ʎn) measures the fraction of the
total flow that contains the wetting phase and is defined from the phase mobilities
ʎ . . In the compressible and immiscible case , (4) and (5) can now be
written in the so-called fractional form which consist of an elliptic pressure equation
( ) ( ) ……………(6)
[32]

for the pressure and the total velocity v = vn + vw and a parabolic saturation equation.
( ) ( ) )
…………………(7)
For the saturation Sw of the wetting phase . The capillary pressure can often be
neglected on a sufficiently large scale in which case (7) becomes hyperbolic .
To solve the system (6) and (7) numerically , it common to use a sequencial
solution .
First (6) is solved to determine the pressure and velocity , which are then held fixed
while advancing the saturation a time step , and so on.
Multiphase , Multicomponent flow
Extending the equations describing two phase flow to immiscible flow of more
than two phases is straight forward mathematically, but defining parameters such as
relative permeability becomes more challenging . In addition, each phase will consist
of more than one chemical species , which are typically grouped into fluid
components because fluid components may transfer between phases (and change
compositions ), the basic conservation laws are expressed for each component l,
( ∑ ) (∑ ) = ∑ ……………………..(8)
Here denotes the mass fraction of component l in phase is the
density of phase is phase velocity, and q is phase source . As above, the
velocities are modelled using the multiphase extension of Darci’s law (4) . The
system consisting of (8) and (4) is just the starting point of modeling and must be
further manipulated and supplied with closure relations (PVT models , phase
equilibrium conditions , etc .) for specific fluid systems . Different choices for closure
relationships are appropriate for different reservoir and different recovery mechanisms
and lead to different levels of model complexity .
The Black-oil Model
The flow model that is used most within reservoir simulation is the black oil
model. The model uses a simple PVT description in which the hydrocarbon chemical
species are lumped together to form two components at surface conditions: a heavy
hydrocarbon called “oil” and a light hydrocarbon component “gas”, for which the
chemical composition to remain constant for all times . at reservoir conditions the gas
component may be partially or completely dissolved in the oil phase , forming one or
two phases(liquid and vapour) that do not dissolve in the water phase. In more
general models , oil can be dissolved in the gas phase, the hydrocarbon component
are allowed to be dissolved in the water (aquous) phase,
[33]

and the water component may be dissolved in the two hydrocarbon phases.
The black oil model is often formulated as conservation of volumes at
standard conditions rather than conservation of component masses by introducing
formation volume factors B = V (V are volumes occupied by a
bulk of component at reservoir and surface conditions) and a gas solubility factor
, which is the volume of gas, measured at a standard conditions, dissolved
at reservoir conditions in a unit of stock-tank oil (at surface condition). The
resulting conservation laws read
(
) +
,
(
)
+
, ……………………..(10)
Commercial simulators typically use a fully implicit discretization to solve the
non-linear system (9). However, there are also several sequential methods that vary in
the choice of primary unknowns and the manipulations, linearization, temporal and
spatial discretization, and the order in which these operations are applied to derive a
set of discrete equation. As an example, the implicit pressure and explicit saturation
method starts by a temporal discretization of balance equations (9) and then eliminates
the volume factors to derive a pressure equation that is solved implicitly to obtain
pressure and fluxes. These are then used to update the volumes (or saturations) in an
explicit time step. Improved stability can be obtained by a sequential implicit method
that also treats the saturation equation implicitly.
[34]

BIBLIOGRAPHY
Textbooks -
Introductory Methods of Numerical Analysis ------------
S.S Sastry
Numerical Methods in Engineering and Science ------------
Dr. B.S. Grewal
Numerical solution of partial differential equations ------------
Dr. Louise Olsen-Kettle
Numerical solution of partial differential equations ------------
Gordon C. Everstine
Internet –
Wikipedia – Free Encyclopedia
Britannica - Online Encyclopedia
Google – Search Engine
[35]















![[INSERT PROJECT NAME]€¦ · Project name Project Number [Where applicable] Project Manager Project Controller Project location [Insert brief details of project location, including](https://img.pdfslide.us/doc/110x75/603496f741d854077e52cec0/insert-project-name-project-name-project-number-where-applicable-project-manager.jpg)