Embed Size (px)
Citation preview
Project 35
Visual Surveillance of Urban Scenes
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Principal Investigators
• David Clausi, Waterloo
• Geoffrey Edwards, Laval
• James Elder, York (Project Leader)
• Frank Ferrie, McGill (Deputy Leader)
• James Little, UBC

PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Partners
• Honeywell (Jeremy Wilson)
• CAE (Ronald Kruk)
• Aimetis (Mike Janzen)
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Participants
Postdoctoral Fellows
Francisco J. Estrada (York)
Bruce Yang (Waterloo)
Students
Eyhab Al-Masri (Waterloo)
Kurtis McBride (Waterloo)
Natalie Nabbout (Waterloo)
Isabelle Begin (McGill)
Albert Law (McGill)
Prasun Lala (McGill)
John Harrison (McGill)
Antoine Noel de Tilly (Laval)
Samir Fertas (Laval)
Michael Yurick (UBC)
Wei-Lwun Lu (UBC)
Patrick Denis (York)
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Goals
• Visual surveillance of urban scenes can potentially be used to enhance human safety and security, to detect emergency events, and to respond appropriately to these events.
• Our project investigates the development of intelligent systems for detecting, identifying, tracking and modeling dynamic events in an urban scene, as well as automatic methods for inferring the three-dimensional static or slowly-changing context in which these events take place.
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Results
• Here we demonstrate new results in the automatic estimation of 3D context and automatic tracking of human traffic from urban surveillance video.
• The CAE S-Mission real-time distributed computing environment is used as a substrate to integrate these intelligent algorithms into a comprehensive urban awareness network.
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
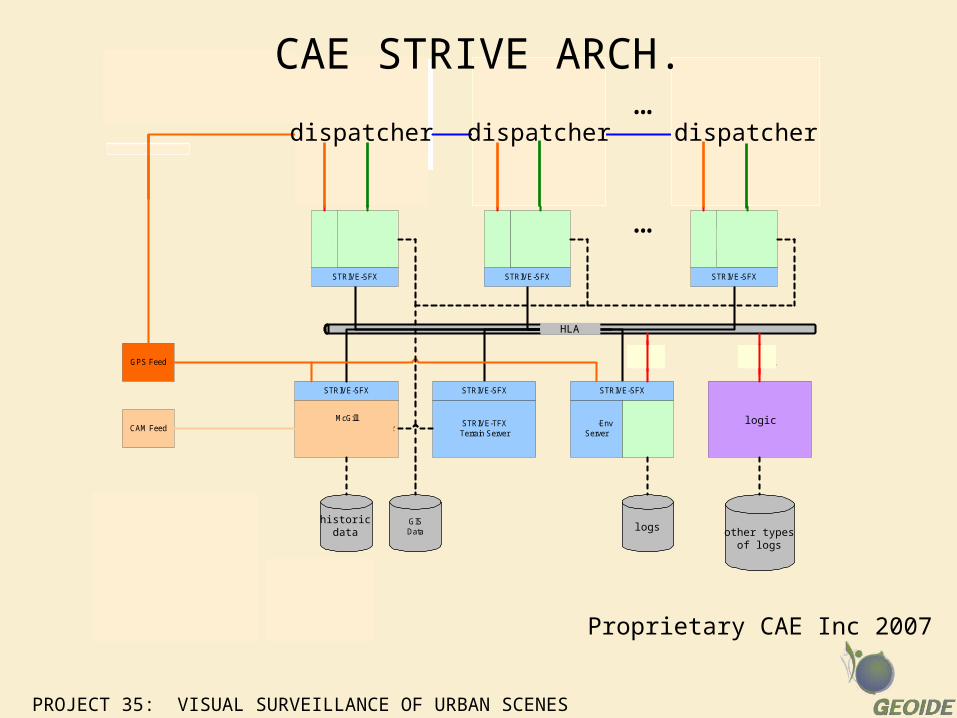
STRIVE-SFX
HLA - EMS-FOM
Facility Level
...
GPS Feed
CAM Feed
TerraVizUI
TerraVizUI
TerraVizUI
EMS-PAServer
EMS-EnvServer
STRIVE-TFXTerrain Server
ActenumScheduler System
Server
STRIVE-SFX
STRIVE-SFX
McGillVideo-Cam Traffic Analyser
Server
...
STRIVE-SFX
STRIVE-SFX STRIVE-SFX
Feed to Legacy System
ActenumProtocol
ActenumProtocol
SARLOG
HistoricalTraffic Data
GISData Historical Calls
Post ListsConstraints
AppSpy
AppSpy
AppSpy
LegacyProtocol
LegacyProtocol
LegacyProtocol
Note: To provide a faillure-safe architecture allthe database disks need to be duplicatedand provide a dual access ( or a raidsystem could be used). The four servershave to be duplicated as backup serversand share the dual access databases withthe main system. The backup servers aremonitoring the status of the main systemsand when a faillure of the main system isdetected, they reinitialized their internalstates from the last SAR & LOG of themain system and resume operations.
CAE Professional Services
CAE Inc
McGill University
Actenum Proprietary CAE Inc 2007
dispatcher dispatcher dispatcher
logic
HLA
logs other typesof logs
historicdata
CAE STRIVE ARCH.
3D Urban Awareness from Single-View Surveillance Video
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
3D Urban Awareness
• 3D scene context (e.g., ground plane information) is crucial for the accurate identification and tracking of human and vehicular traffic in urban scenes.
• 3D scene context is also important for human interpretation of urban surveillance data
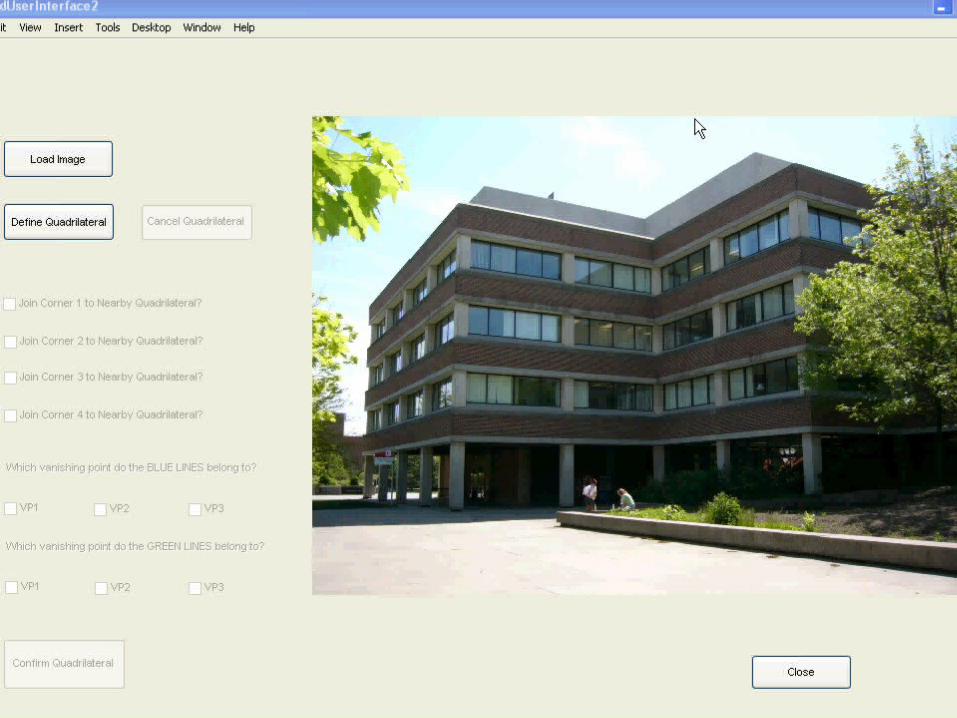
• Limited static 3D scene context can be estimated manually, but this is time-consuming, and cannot be adapted to slowly-changing scenes.
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Ultimate Goal
• Our ultimate goal is to automate this process!
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
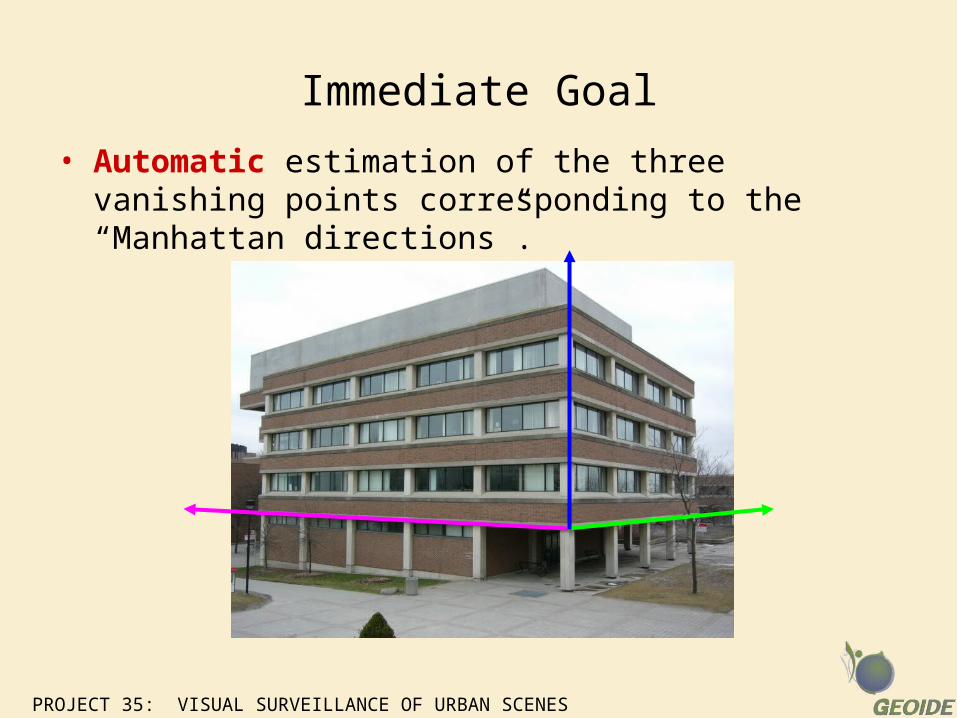
Immediate Goal
• Automatic estimation of the three vanishing points corresponding to the “Manhattan directions”.
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
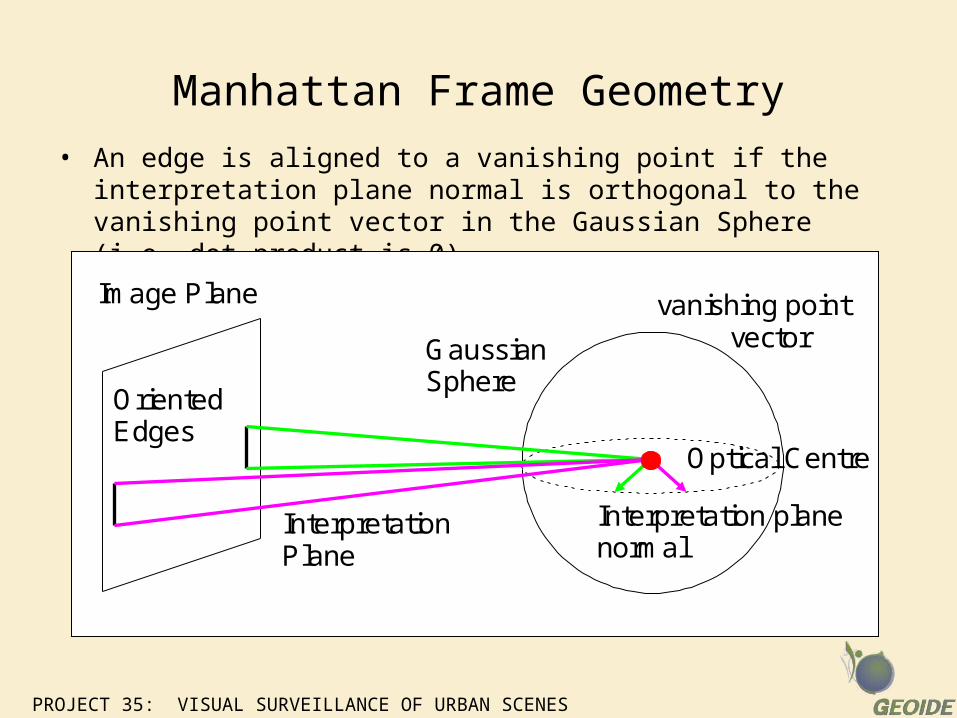
Manhattan Frame Geometry
• An edge is aligned to a vanishing point if the interpretation plane normal is orthogonal to the vanishing point vector in the Gaussian Sphere (i.e. dot product is 0)
Optical Centre
vanishing pointvectorGaussian
Sphere
InterpretationPlane
OrientedEdges
Interpretation planenormal
Image Plane
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
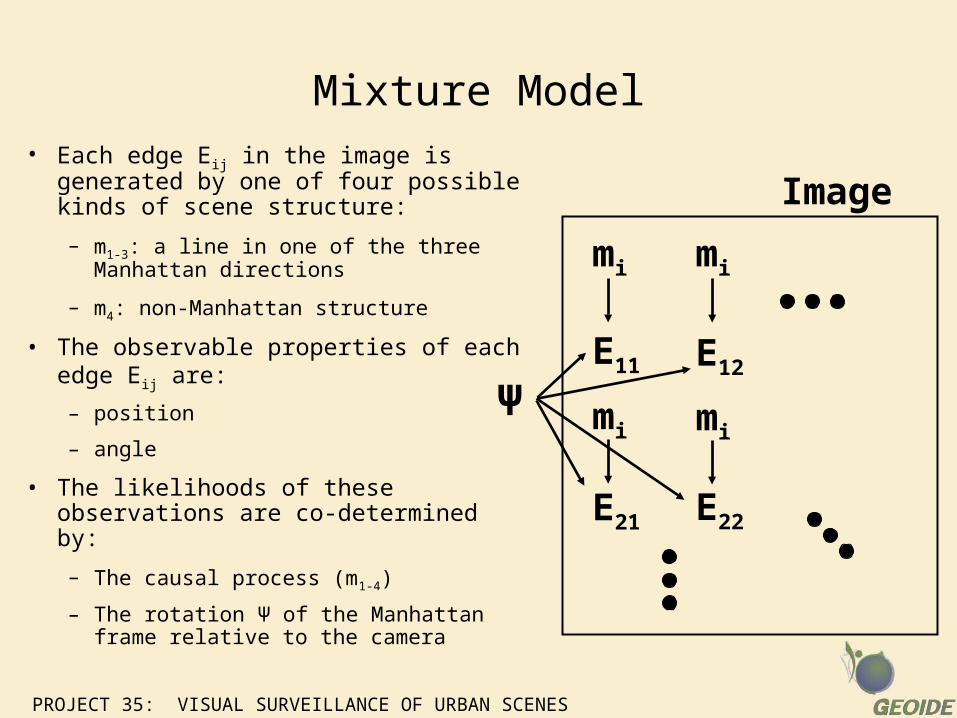
Mixture Model• Each edge Eij in the image is
generated by one of four possible kinds of scene structure:
– m1-3: a line in one of the three Manhattan directions
– m4: non-Manhattan structure
• The observable properties of each edge Eij are:
– position
– angle
• The likelihoods of these observations are co-determined by:
– The causal process (m1-4)
– The rotation Ψ of the Manhattan frame relative to the camera
mimi
mimi
E11 E12
E22E21
Ψ
Image
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
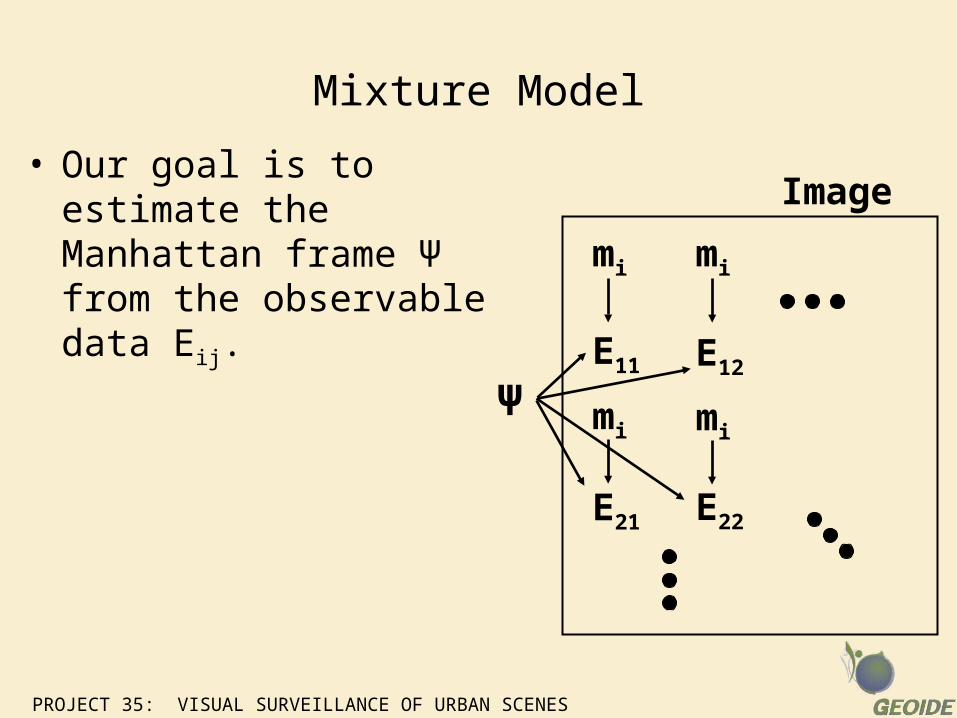
Mixture Model
• Our goal is to estimate the Manhattan frame Ψ from the observable data Eij. mimi
mimi
E11 E12
E22E21
Ψ
Image
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
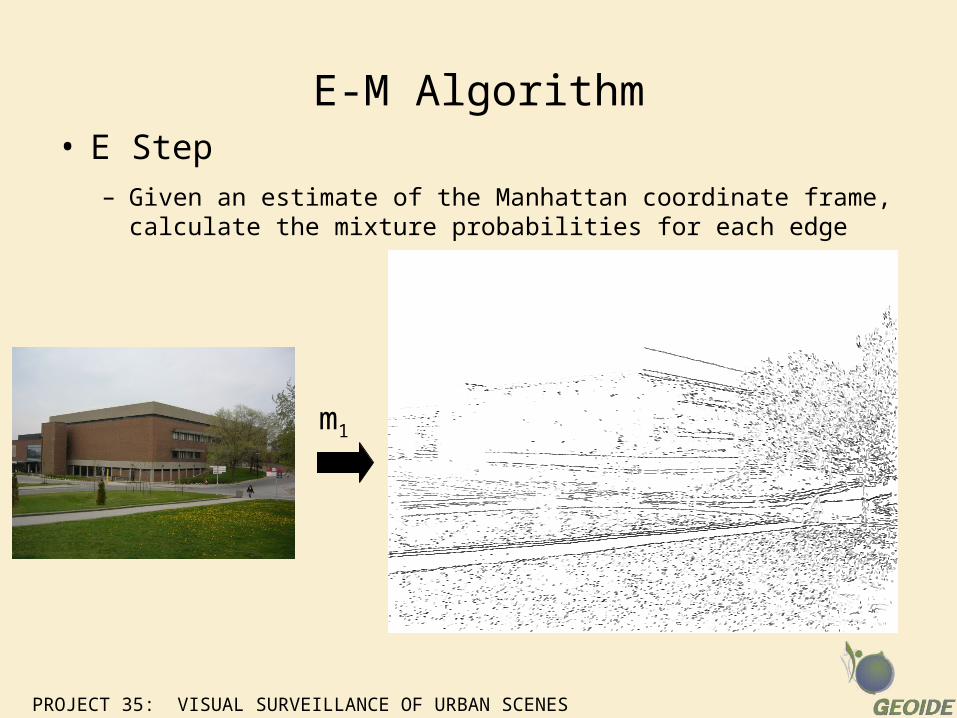
E-M Algorithm• E Step
– Given an estimate of the Manhattan coordinate frame, calculate the mixture probabilities for each edge
m1
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
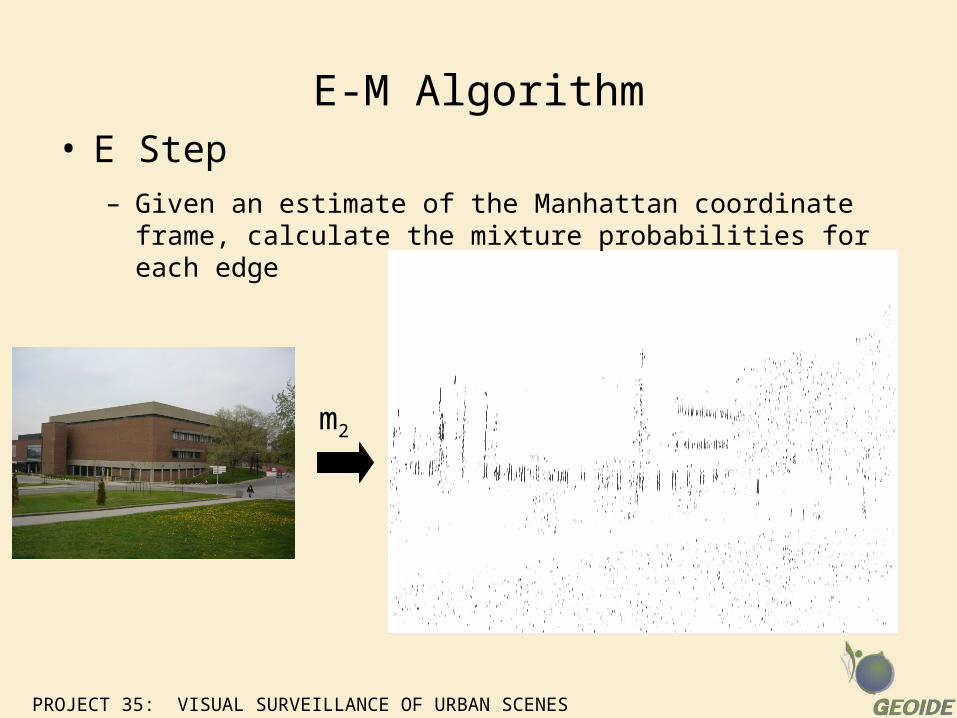
E-M Algorithm• E Step
– Given an estimate of the Manhattan coordinate frame, calculate the mixture probabilities for each edge
m2
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
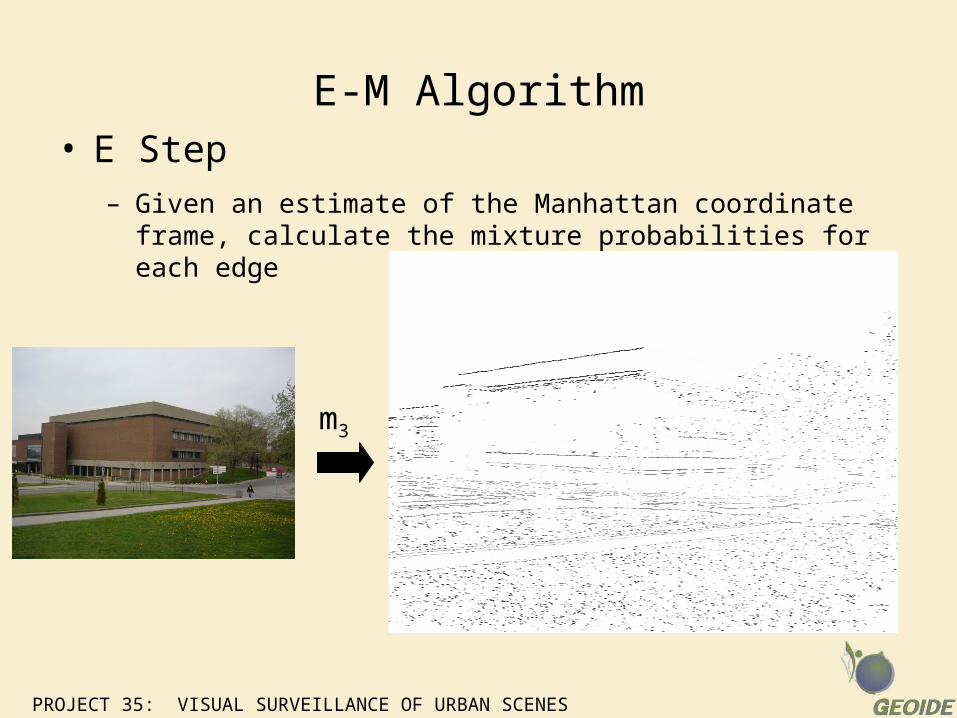
E-M Algorithm• E Step
– Given an estimate of the Manhattan coordinate frame, calculate the mixture probabilities for each edge
m3
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
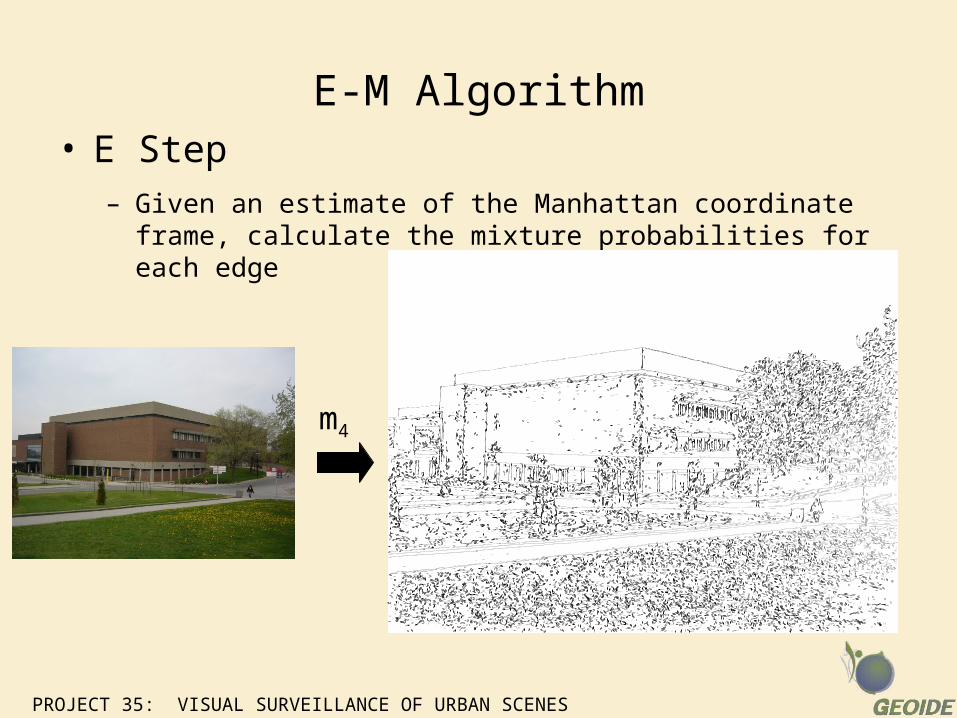
E-M Algorithm• E Step
– Given an estimate of the Manhattan coordinate frame, calculate the mixture probabilities for each edge
m4
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
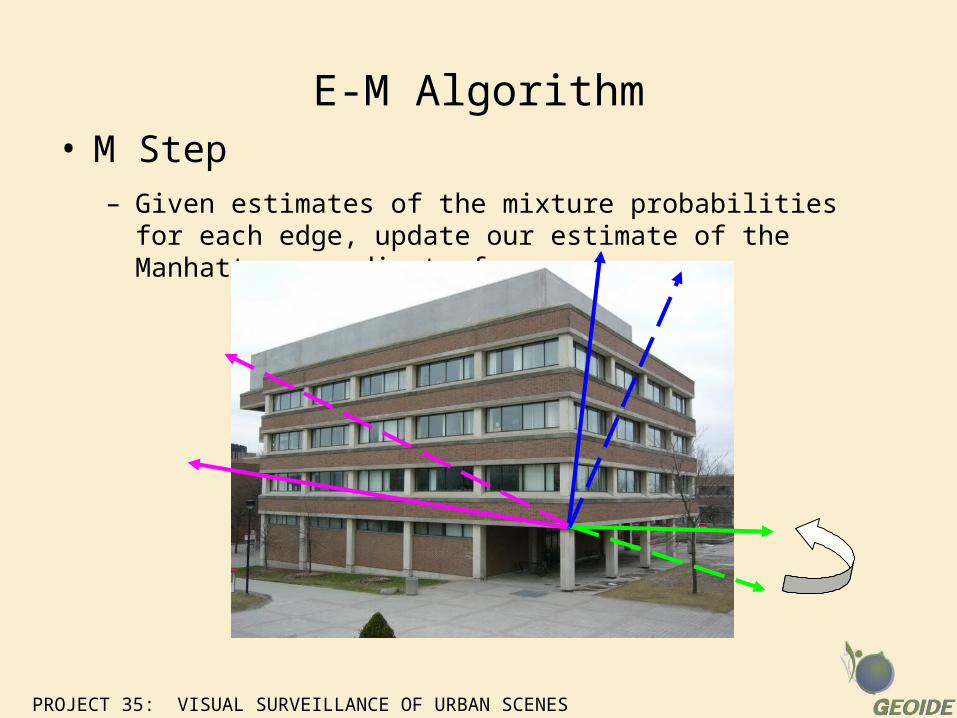
E-M Algorithm• M Step
– Given estimates of the mixture probabilities for each edge, update our estimate of the Manhattan coordinate frame
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
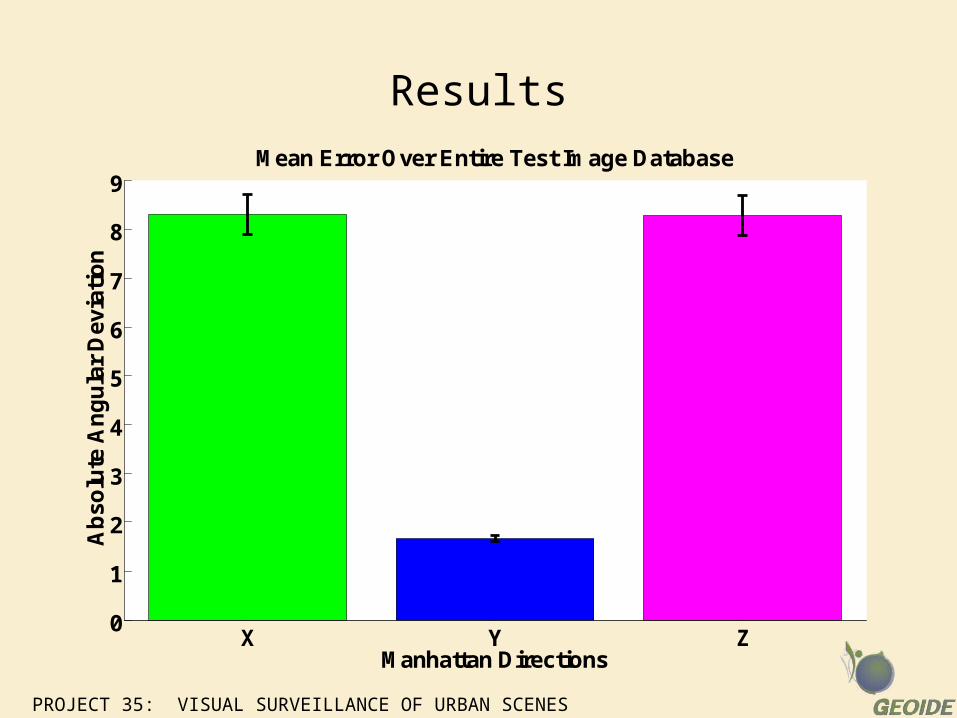
Results
X Y Z0
1
2
3
4
5
6
7
8
9
Manhattan Directions
Ab
solu
te A
ng
ula
r D
evia
tio
n
Mean Error Over Entire Test Image Database
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
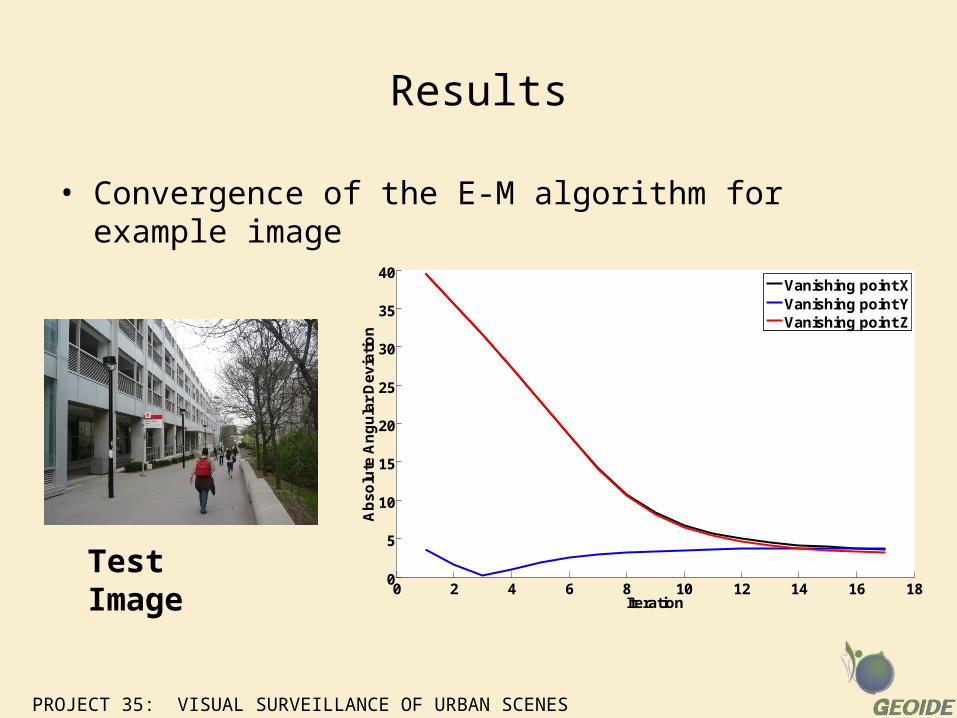
Results
• Convergence of the E-M algorithm for example image
0 2 4 6 8 10 12 14 16 180
5
10
15
20
25
30
35
40
Iteration
Ab
so
lute
An
gu
lar
De
via
tio
n
Vanishing point XVanishing point YVanishing point Z
Test Image
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
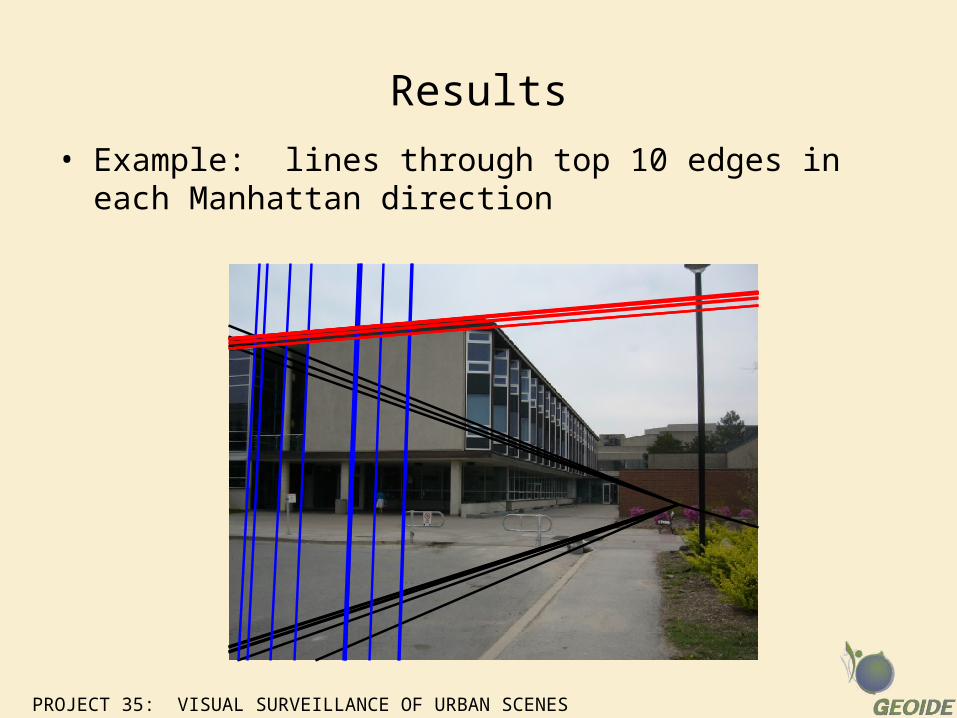
Results
• Example: lines through top 10 edges in each Manhattan direction
Tracking Human Activity
Single-Camera Tracking
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
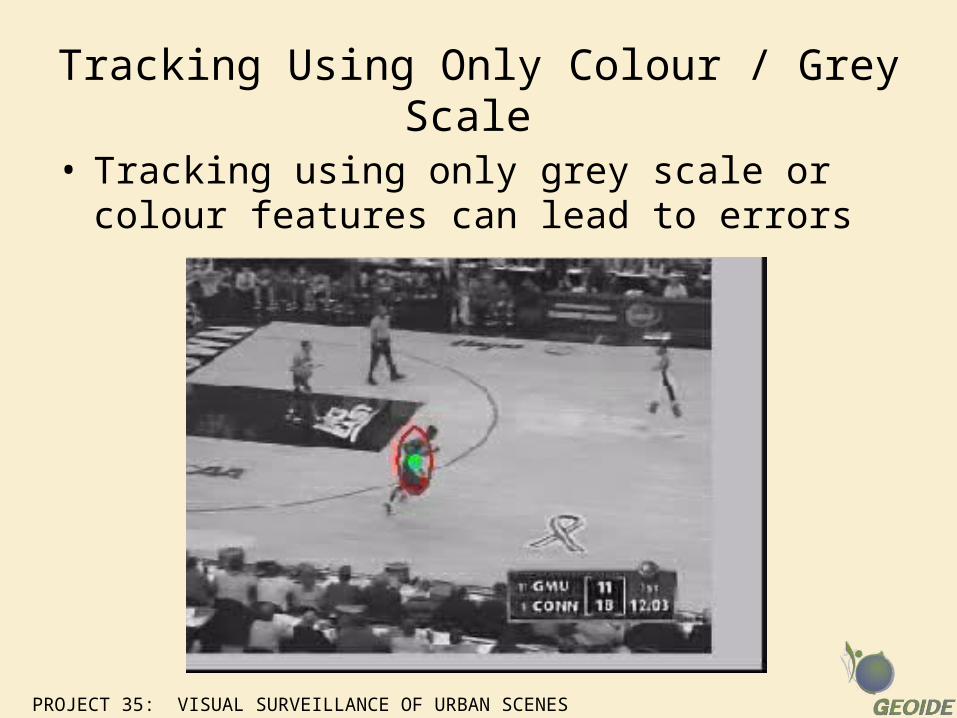
Tracking Using Only Colour / Grey Scale
• Tracking using only grey scale or colour features can lead to errors
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
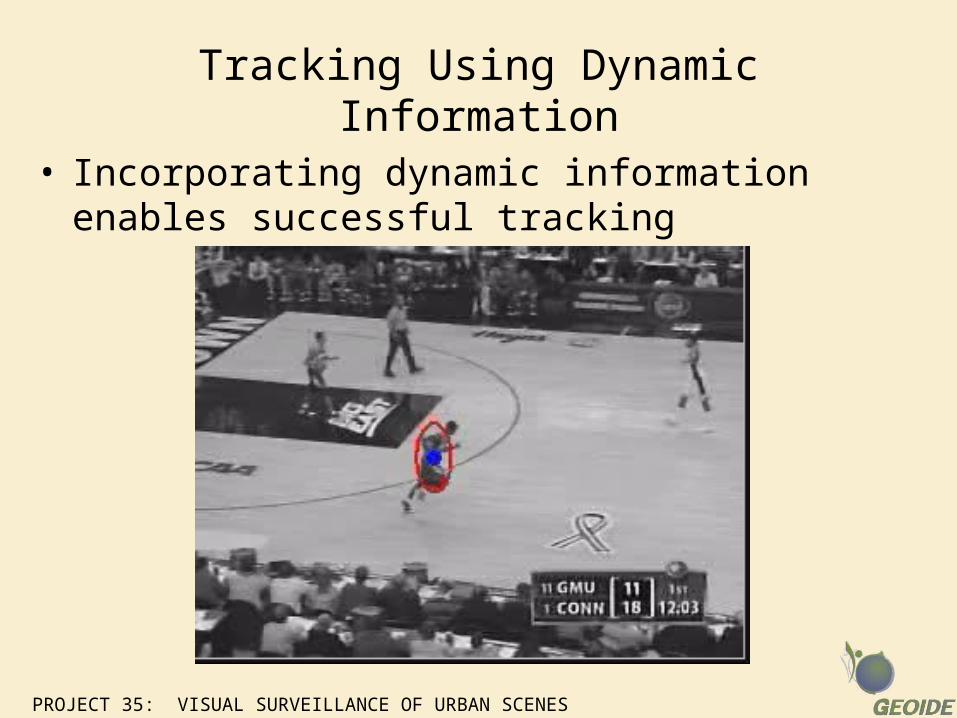
Tracking Using Dynamic Information
• Incorporating dynamic information enables successful tracking
Tracking over Multi-Camera Network
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Goal
• Integrate tracking of human activity from multiple cameras into world-centred activity map
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
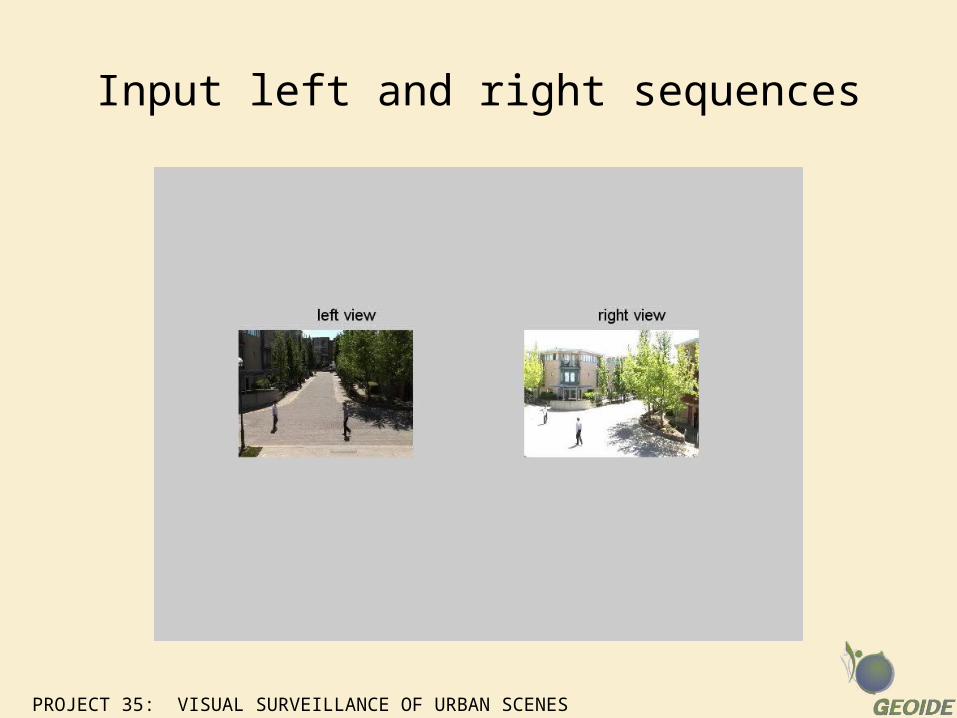
Input left and right sequences
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Independent tracking
• Each person tracked independently in each camera using Boosted Particle Filters.
– Background subtraction identifies possible detections of people which are then tracked with a particle filter using brightness histograms as the observation model.
• Tracks are projected via a homography to the street map, and then Kalman filtered independently based on the error model.

PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Independent tracks
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Integration
• Tracks are averaged to approximate joint estimation of composite errors
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
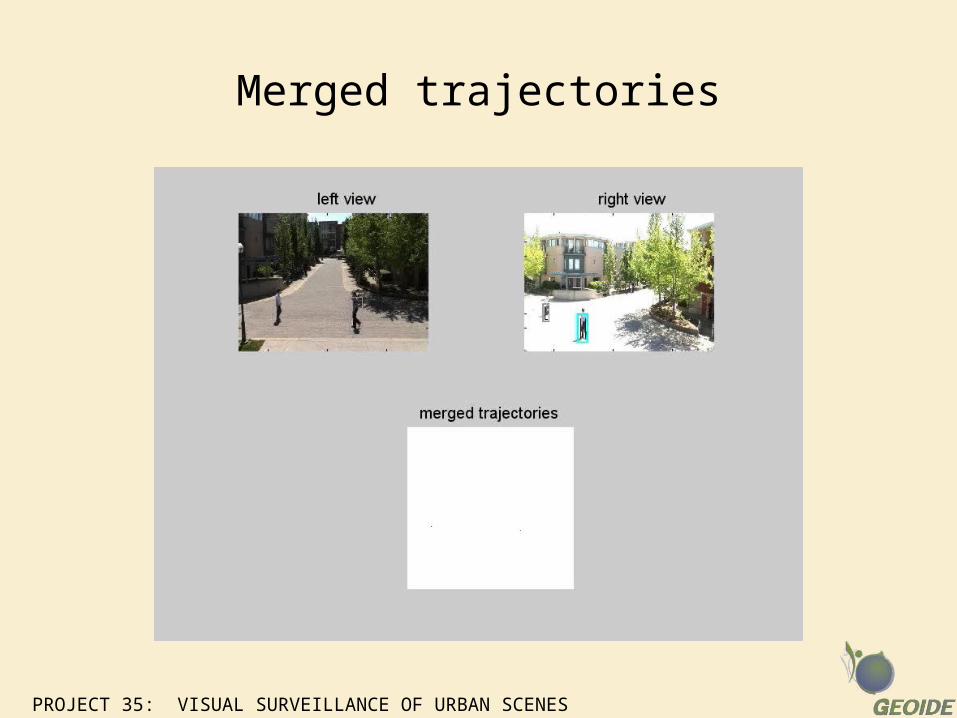
Merged trajectories
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Future Work
• Integrated multi-camera background subtraction
• Integrated particle filter in world coordinates using joint observation model over all sensors in network.
Tracking in Dynamic Background Settings
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
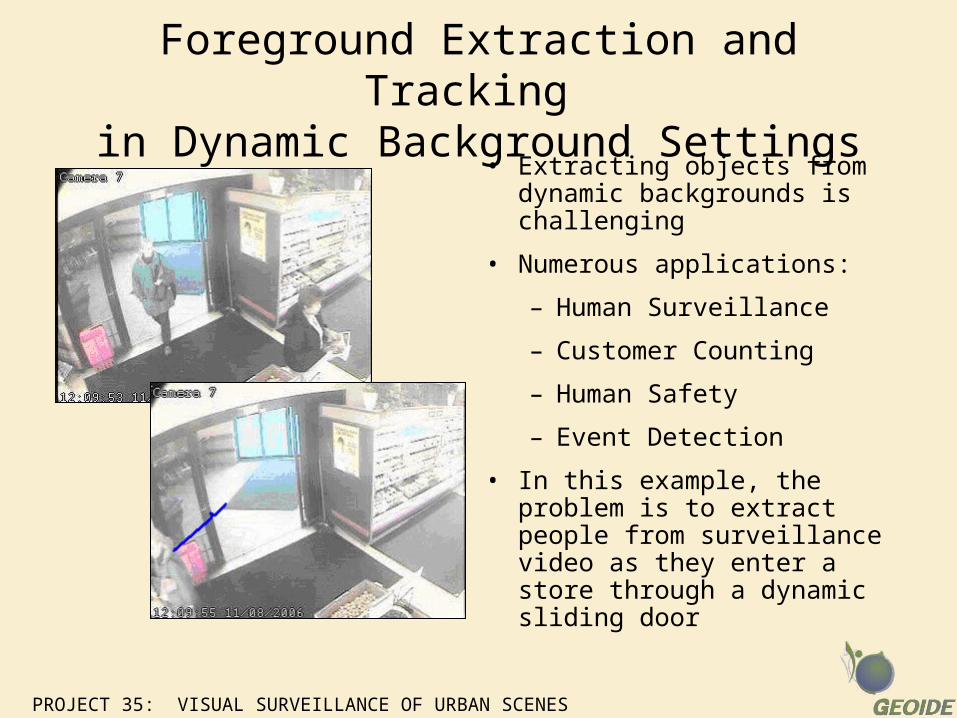
Foreground Extraction and Tracking in Dynamic Background Settings
• Extracting objects from dynamic backgrounds is challenging
• Numerous applications:
– Human Surveillance
– Customer Counting
– Human Safety
– Event Detection
• In this example, the problem is to extract people from surveillance video as they enter a store through a dynamic sliding door
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Methodology Overview
• Video sequences are pre-processed and corner feature points are extracted
• Corners are tracked to obtain trajectories of the moving background
• Background trajectories are learned and a classifier is formed
• Trajectories of all moving objects in the test image sequences are classified based on learned model into either background or foreground trajectories
• Foreground Trajectories are kept in image sequence and the object corresponding to those trajectories is tagged as foreground
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Demo 1: Successful Tracking and Classification
• This demo illustrates This demo illustrates a case of successful a case of successful tracking and tracking and classification of an classification of an entering person. entering person.
• The person is The person is classified into classified into foreground based on foreground based on the extracted the extracted
trtrajectories..
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Demo 2: Failed Tracking but Successful Classification
• Demo 2 shows a case when the tracker loses track of the person after a few frames
• However, the classification is still correct since only a small number of frames are required to identify the trajectory.
Recognizing Actions using the Boosted Particle Filter
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
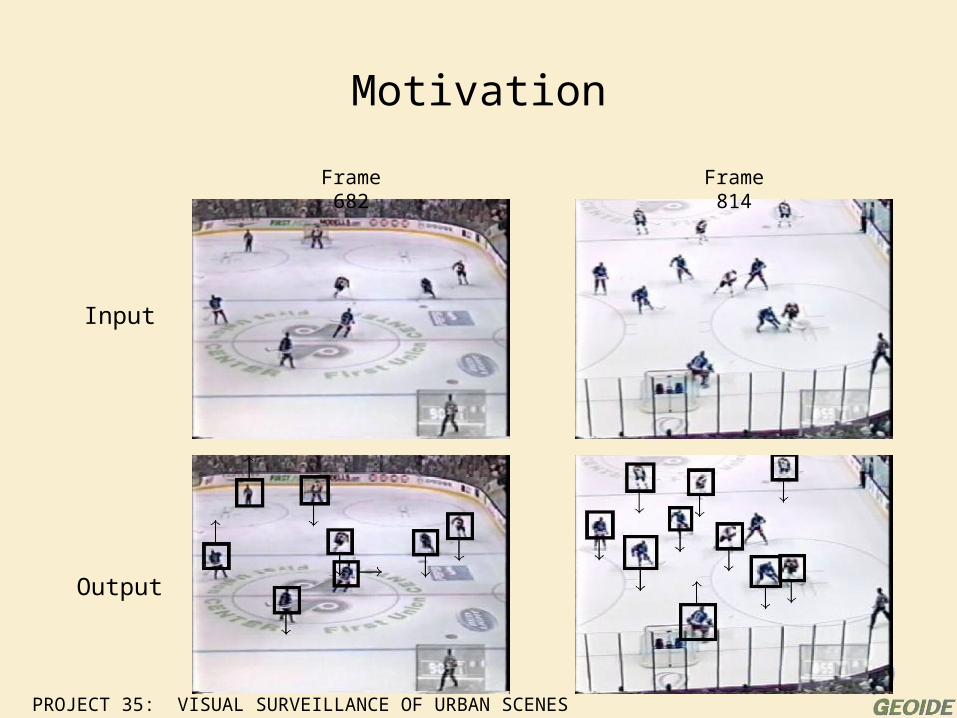
Motivation
Frame 682 Frame 814
Input
Output
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
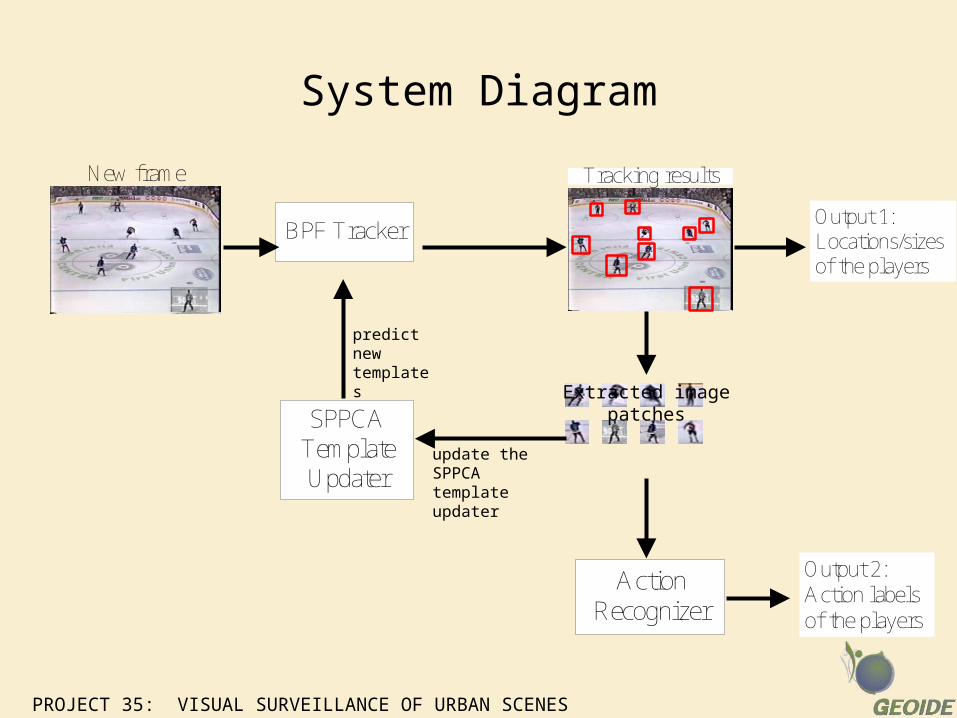
update the SPPCA template updater
System Diagram
New frame
BPF Tracker
Tracking results
Action Recognizer
SPPCA Template Updater
Extracted image patches
Output 2:Action labelsof the players
Output 1:Locations/sizesof the players
predict new templates
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
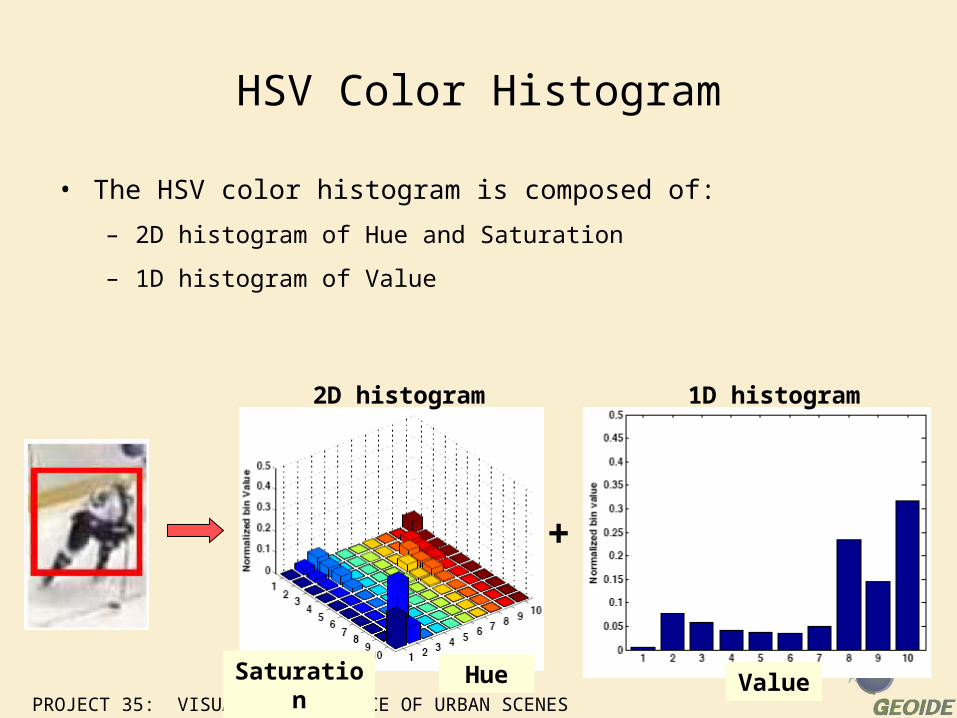
HSV Color Histogram
• The HSV color histogram is composed of:
– 2D histogram of Hue and Saturation
– 1D histogram of Value
+
HueSaturation
2D histogram
Value
1D histogram
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
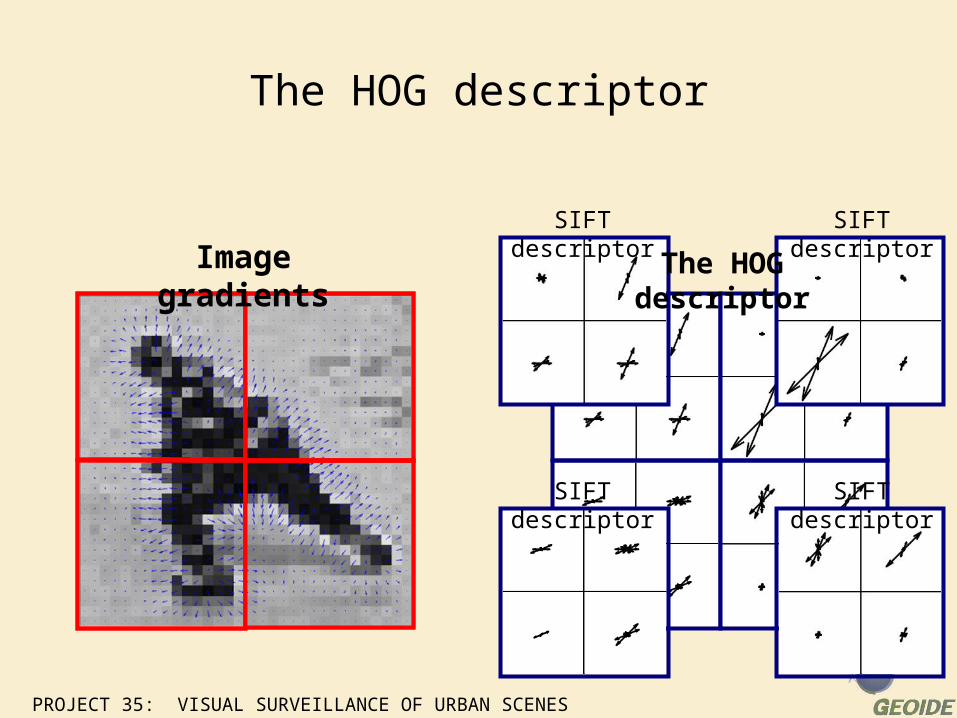
The HOG descriptor
The HOG descriptor
SIFT descriptor SIFT descriptor
SIFT descriptor SIFT descriptor
Image gradients
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
?
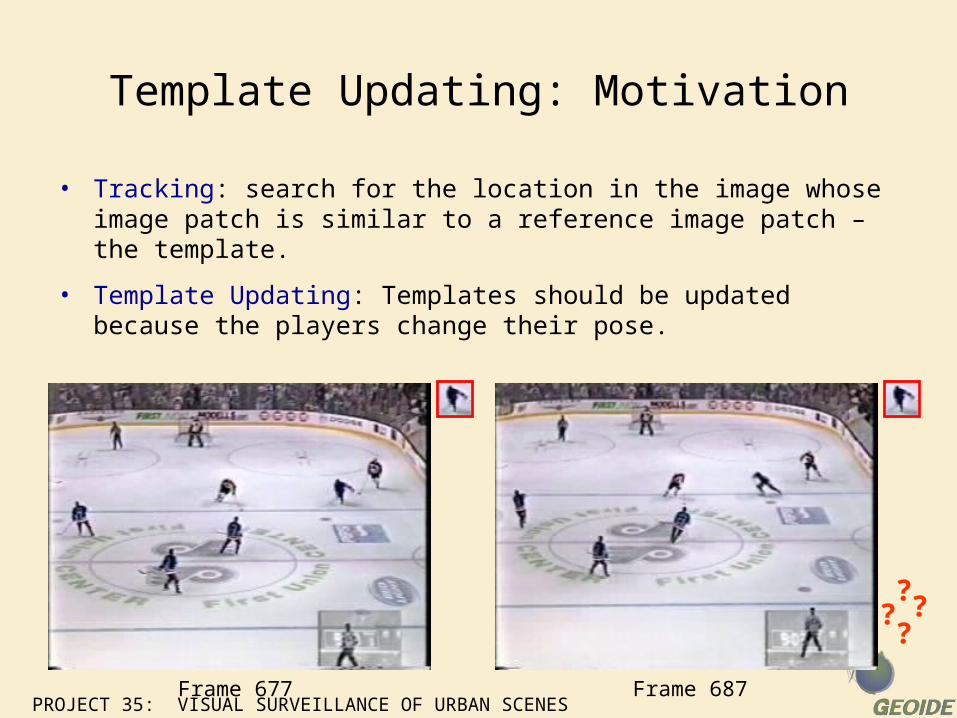
Template Updating: Motivation
• Tracking: search for the location in the image whose image patch is similar to a reference image patch – the template.
• Template Updating: Templates should be updated because the players change their pose.
?? ?
Frame 677 Frame 687
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
Template Updating: Operations
• Offline
– Learning: Learn the template model from training data
• Online:
– Prediction:
Predict the new template used in the next frame
– Updating:
Update the template model using the current observation
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
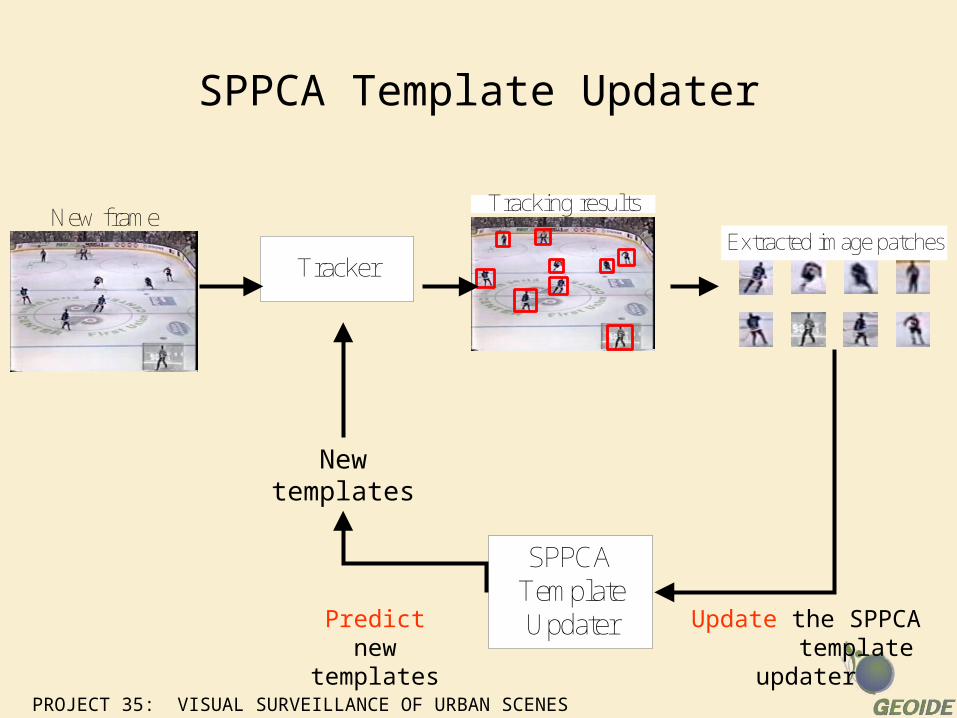
SPPCA Template Updater
New frame
Tracker
Tracking results
Extracted image patches
SPPCA Template Updater
New templates
Update the SPPCA template updater
Predict new templates
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
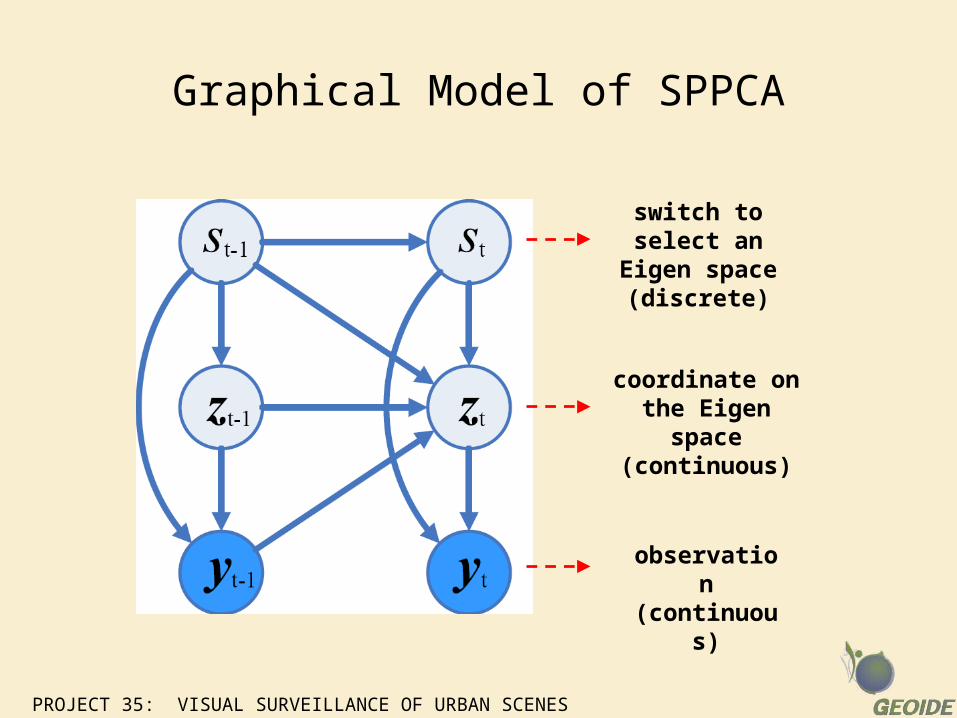
Graphical Model of SPPCA
observation (continuous)
coordinate on the Eigen space
(continuous)
switch to select an Eigen space
(discrete)
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
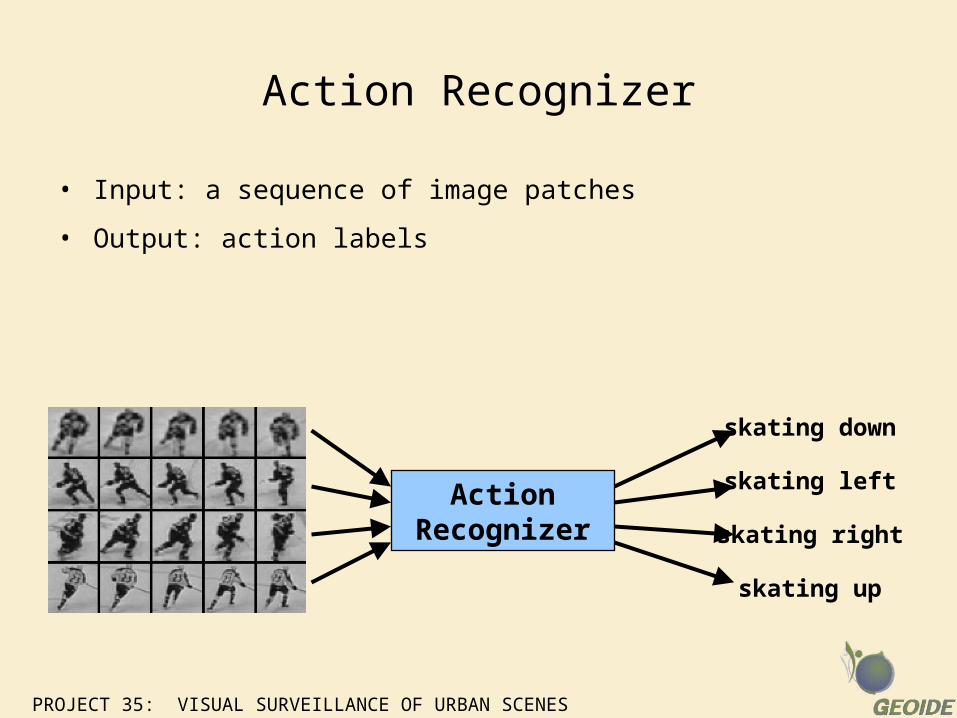
Action Recognizer
• Input: a sequence of image patches
• Output: action labels
Action Recognizer
skating down
skating left
skating right
skating up
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
• Summary:
– Features:
The HOG descriptor
– Classifier:
The SMLR classifier
– Weights:
weights learned by MAP estimation with a sparsity-promoted Laplacian prior
– Basis functions:
motion similarity between the testing and training data
Action Recognizer
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
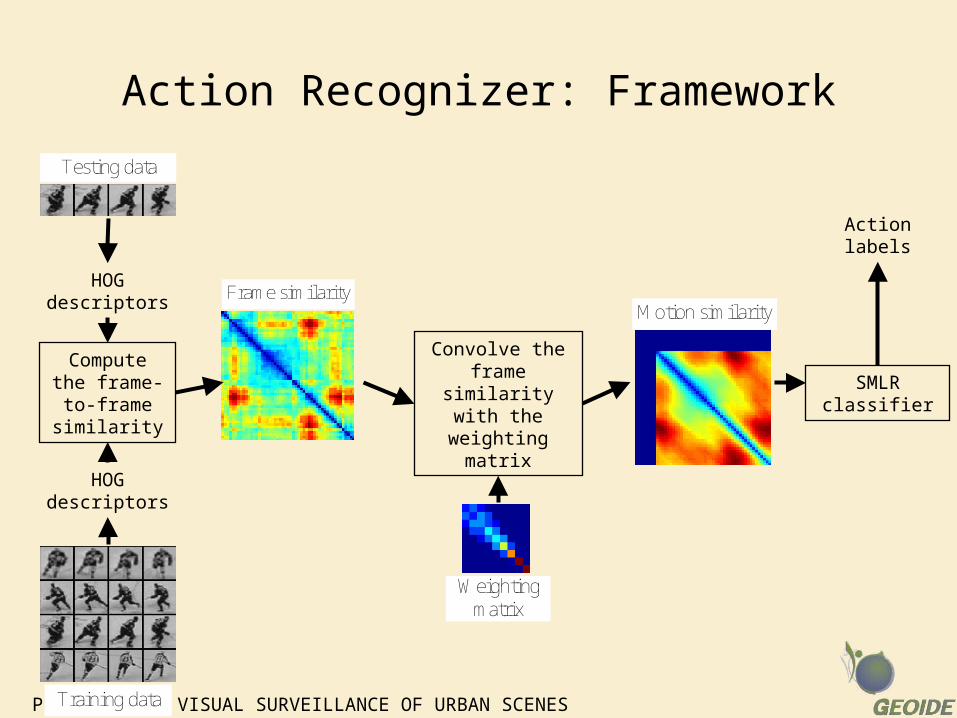
Action Recognizer: Framework
Testing data
Training data
Frame similarity
Weightingmatrix
Motion similarity
Compute the frame-to-frame
similarity
Convolve the frame similarity
with the weighting matrix
SMLR classifier
Action labels
HOG descriptors
HOG descriptors
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
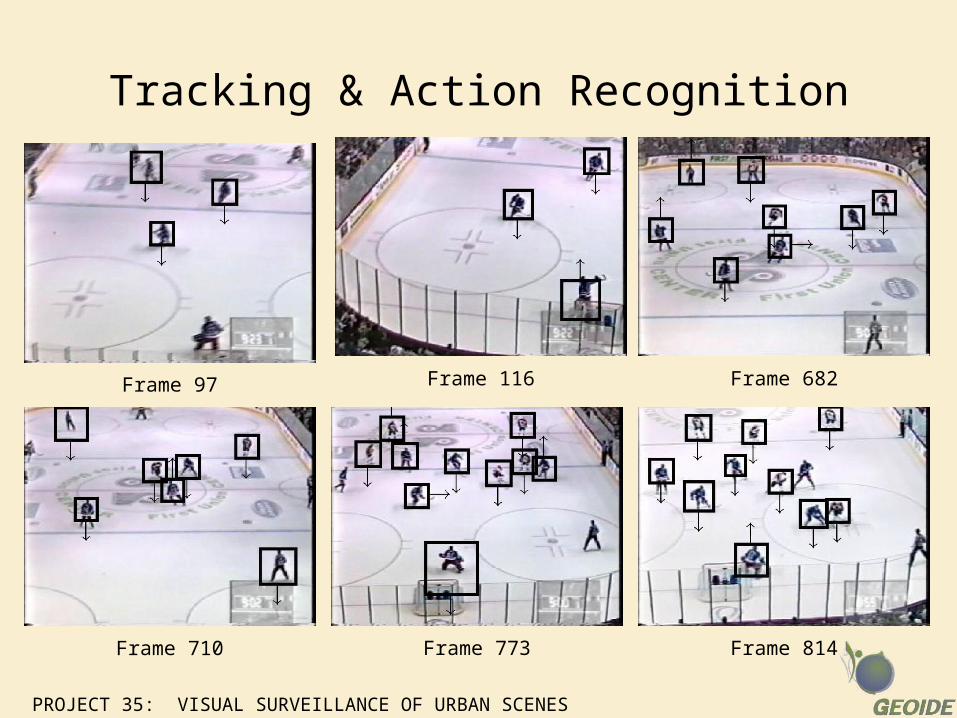
Tracking & Action Recognition
Frame 97 Frame 116 Frame 682
Frame 710 Frame 773 Frame 814
PROJECT 35: VISUAL SURVEILLANCE OF URBAN SCENES
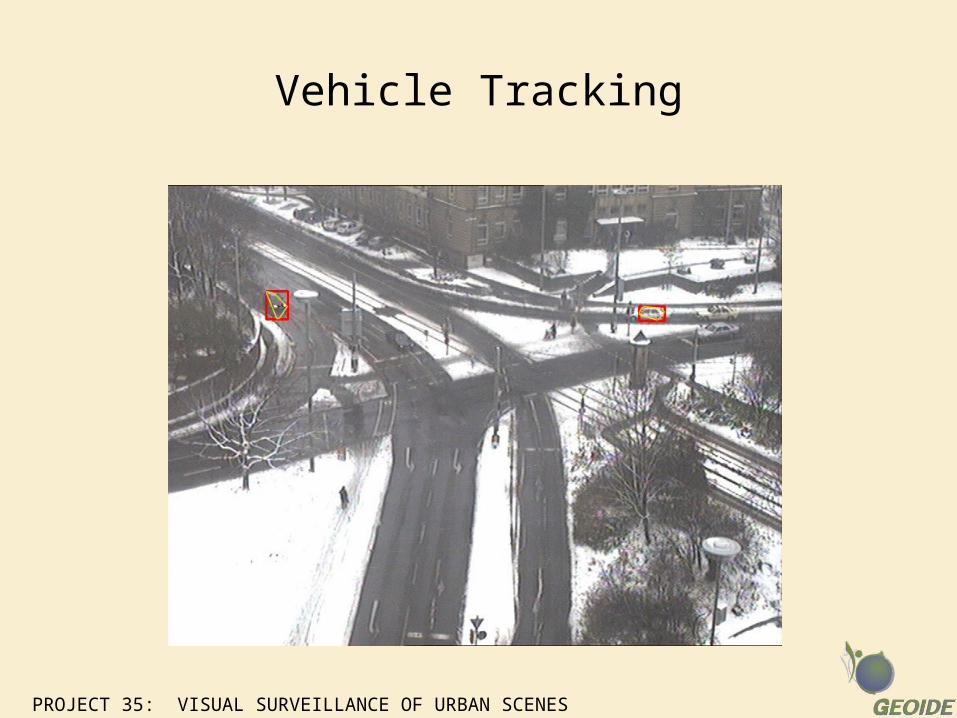
Vehicle Tracking