Embed Size (px)
Citation preview
AI & NK, 10/31/2014 1
Project #2: Design of an Operational
Amplifier
By:
Adrian Ildefonso
Nedeljko Karaulac
I have neither given nor received any unauthorized assistance on this project.
Process: Baker’s 50nm
CAD Tool: Cadence Virtuoso
AI & NK, 10/31/2014 2
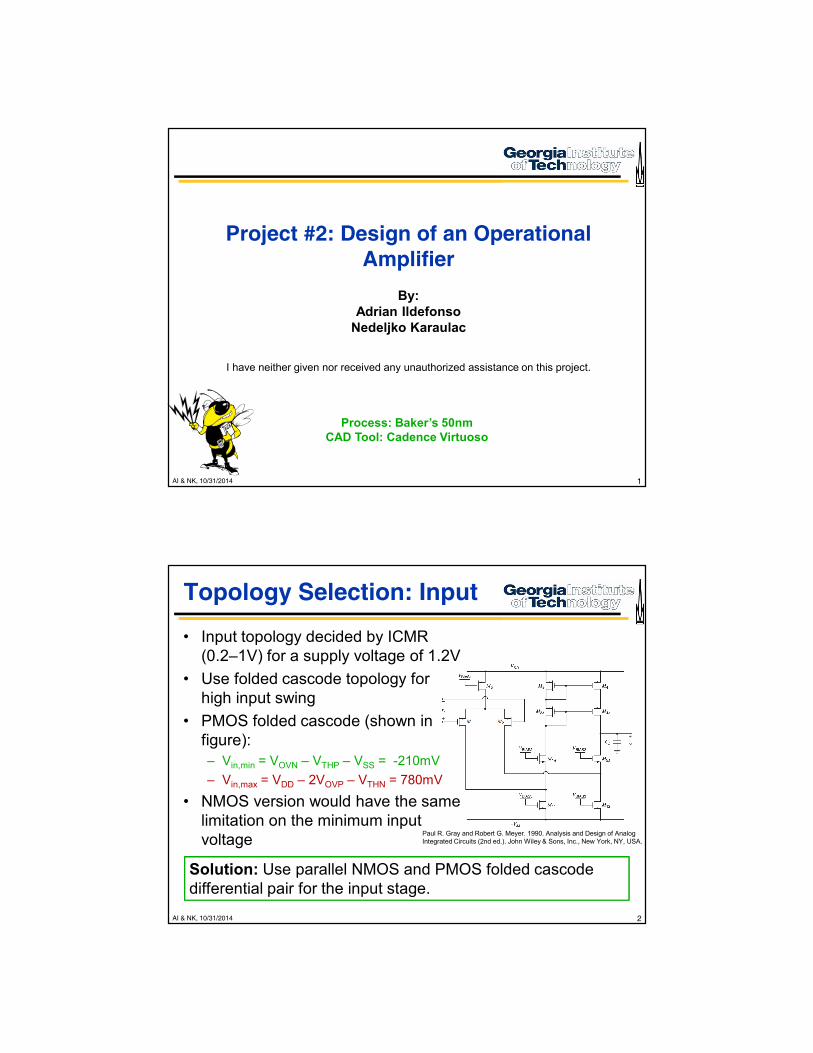
Topology Selection: Input
• Input topology decided by ICMR
(0.2–1V) for a supply voltage of 1.2V
• Use folded cascode topology for
high input swing
• PMOS folded cascode (shown in
figure):
– Vin,min = VOVN – VTHP – VSS = -210mV
– Vin,max = VDD – 2VOVP – VTHN = 780mV
• NMOS version would have the same
limitation on the minimum input
voltage
Solution: Use parallel NMOS and PMOS folded cascode
differential pair for the input stage.
Paul R. Gray and Robert G. Meyer. 1990. Analysis and Design of Analog
Integrated Circuits (2nd ed.). John Wiley & Sons, Inc., New York, NY, USA.
AI & NK, 10/31/2014 3
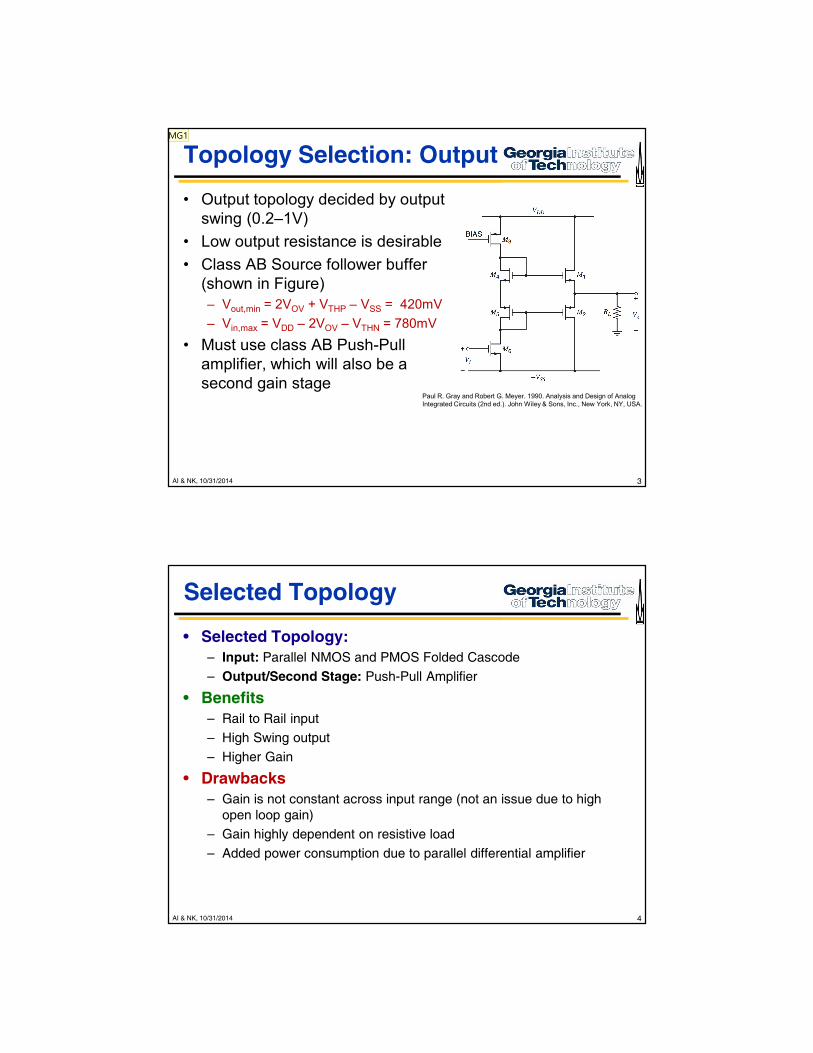
Topology Selection: Output
• Output topology decided by output
swing (0.2–1V)
• Low output resistance is desirable
• Class AB Source follower buffer
(shown in Figure)
– Vout,min = 2VOV + VTHP – VSS = 420mV
– Vin,max = VDD – 2VOV – VTHN = 780mV
• Must use class AB Push-Pull
amplifier, which will also be a
second gain stagePaul R. Gray and Robert G. Meyer. 1990. Analysis and Design of Analog
Integrated Circuits (2nd ed.). John Wiley & Sons, Inc., New York, NY, USA.
MG1
AI & NK, 10/31/2014
• Selected Topology:
– Input: Parallel NMOS and PMOS Folded Cascode
– Output/Second Stage: Push-Pull Amplifier
• Benefits
– Rail to Rail input
– High Swing output
– Higher Gain
• Drawbacks
– Gain is not constant across input range (not an issue due to high
open loop gain)
– Gain highly dependent on resistive load
– Added power consumption due to parallel differential amplifier
4
Selected Topology
AI & NK, 10/31/2014
• For SR of 120V/us
– IT = SR*CL = 120 uA
• Current in cascode branch is 1.2 – 1.5 times the tail current
• For parallel differential pairs (required to meet ICMR), we
need more than, which is over the required power
• After literature review, no circuit was found (in research or
industry) that meets all the criteria for this project.
• We decided to sacrifice SR and BW in order to save power
• Tail current chosen: 40 uA
• This means that our SR should be around 40 V/us
5
DesignMG2
AI & NK, 10/31/2014 6
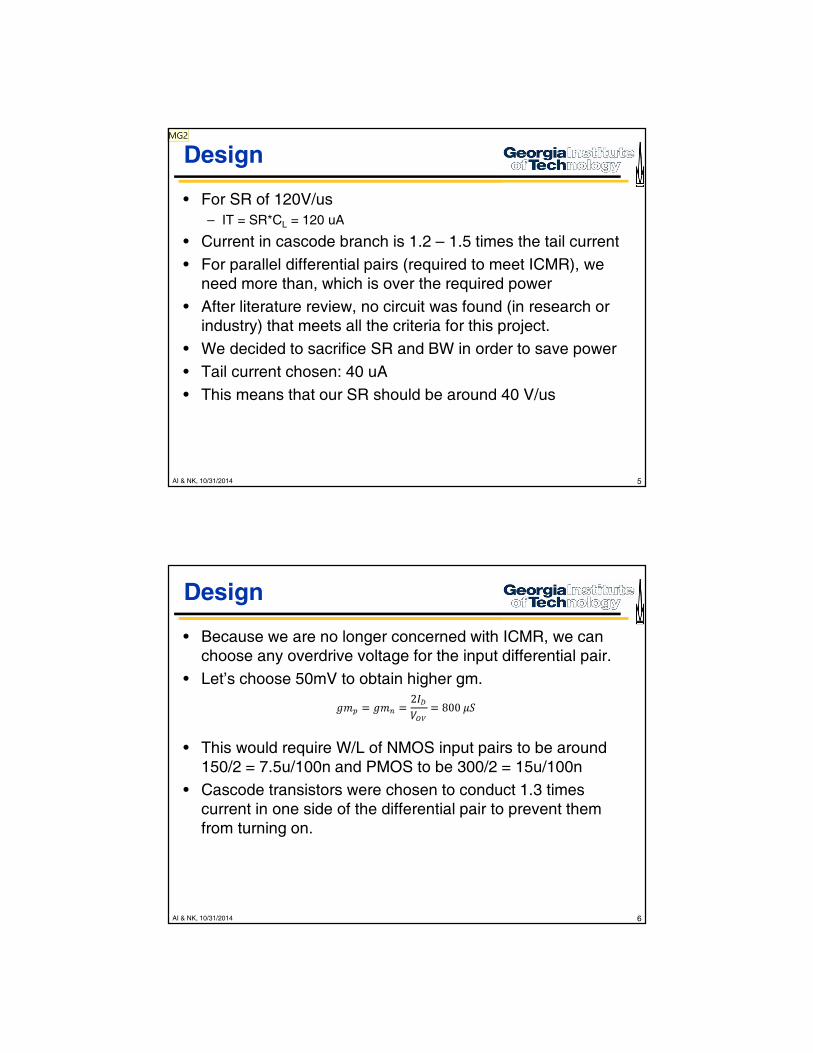
Design
• Because we are no longer concerned with ICMR, we can
choose any overdrive voltage for the input differential pair.
• Let’s choose 50mV to obtain higher gm.
• This would require W/L of NMOS input pairs to be around
150/2 = 7.5u/100n and PMOS to be 300/2 = 15u/100n
• Cascode transistors were chosen to conduct 1.3 times
current in one side of the differential pair to prevent them
from turning on.
AI & NK, 10/31/2014
• Output stage is a push pull amplifier, sized to conduct 20uA
• Cascode device was added to increase output resistance
and gain
• Compensation capacitor was added before the cascode
device to use the cascode as a buffer
– This helped greatly with the frequency response of the amplifier but
did not remove the RHPZ
– Resulted in bigger compensation capacitor because now the miller
capacitance is in series with the CDS of the cascode device,
reducing the effective capacitance
– Zero nulling resistor was added to remove RHPZ
7
Design
AI & NK, 10/31/2014
Reference Schematic
8
Used topology in Baker’s Figure 20.47
Resistor value changed to obtain
desired currents
AI & NK, 10/31/2014
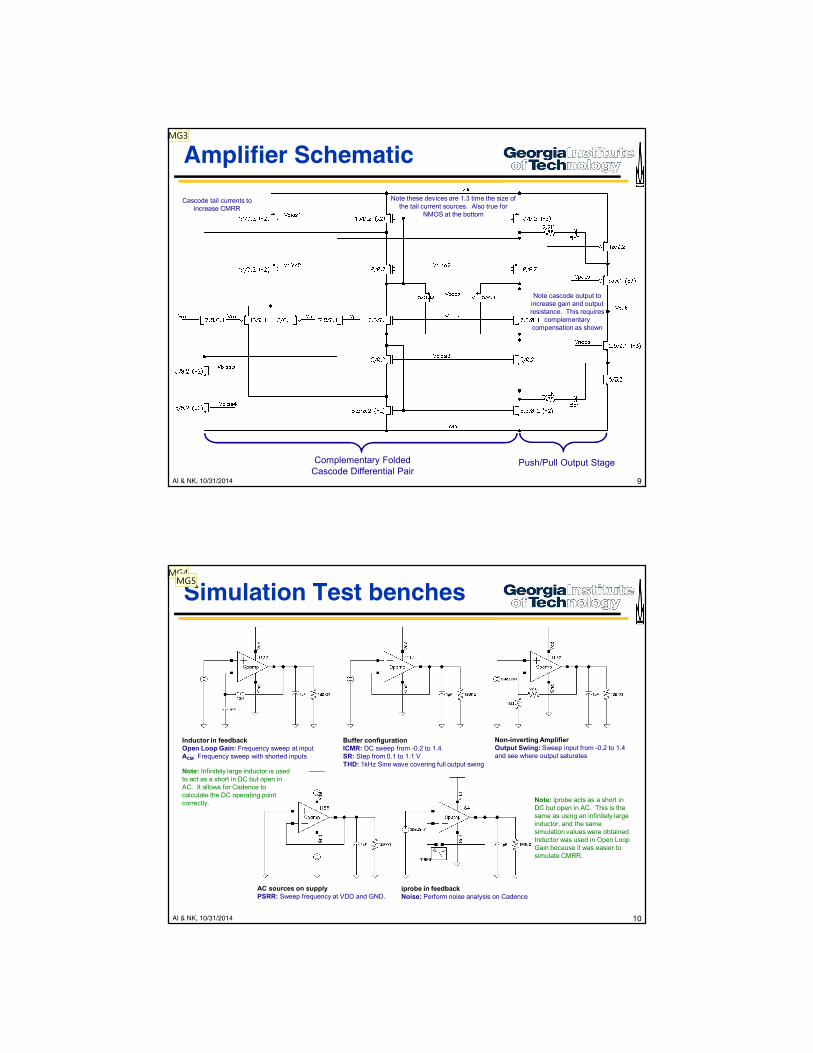
Amplifier Schematic
9
Complementary Folded
Cascode Differential PairPush/Pull Output Stage
Note these devices are 1.3 time the size of
the tail current sources. Also true for
NMOS at the bottom
Note cascode output to
increase gain and output
resistance. This requires
complementary
compensation as shown
Cascode tail currents to
increase CMRR
MG3
AI & NK, 10/31/2014
Simulation Test benches
10
Buffer configuration
ICMR: DC sweep from -0.2 to 1.4
SR: Step from 0.1 to 1.1 V
THD: 1kHz Sine wave covering full output swing
Non-inverting Amplifier
Output Swing: Sweep input from -0.2 to 1.4
and see where output saturates
Inductor in feedback
Open Loop Gain: Frequency sweep at input
ACM: Frequency sweep with shorted inputs
AC sources on supply
PSRR: Sweep frequency at VDD and GND.iprobe in feedback
Noise: Perform noise analysis on Cadence
Note: Infinitely large inductor is used
to act as a short in DC but open in
AC. It allows for Cadence to
calculate the DC operating point
correctly. Note: iprobe acts as a short in
DC but open in AC. This is the
same as using an infinitely large
inductor, and the same
simulation values were obtained.
Inductor was used in Open Loop
Gain because it was easier to
simulate CMRR.
MG4MG5
AI & NK, 10/31/2014 11
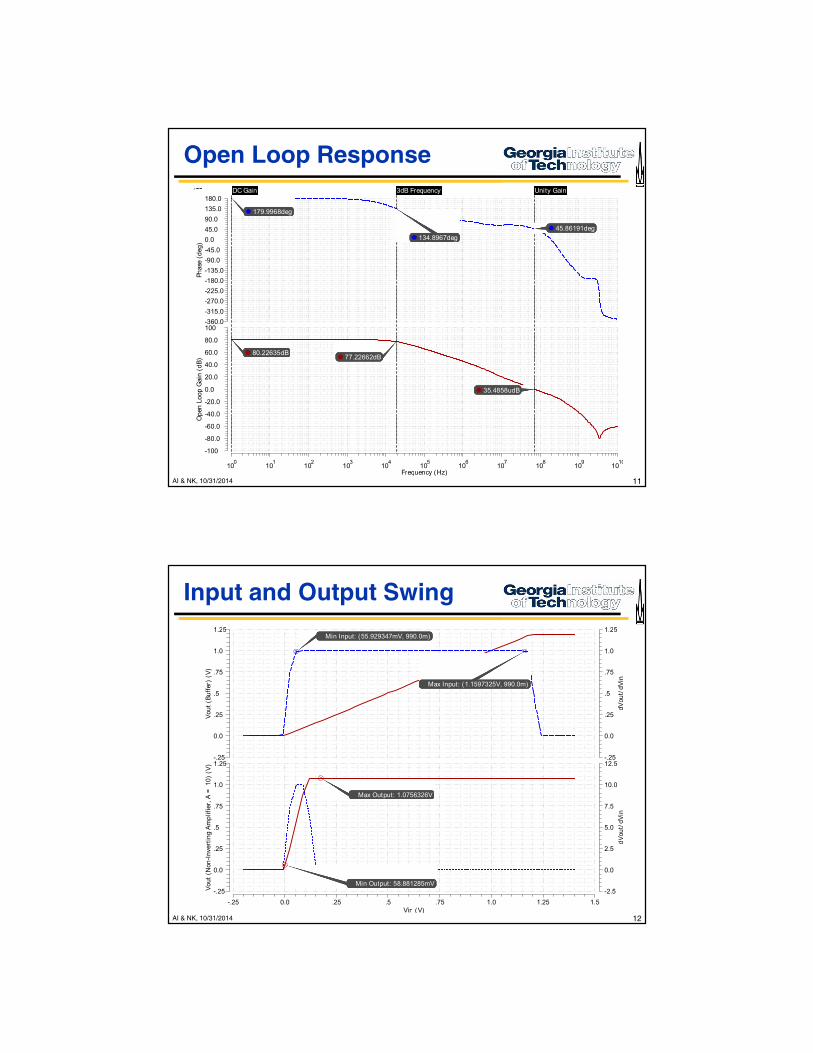
Open Loop Response
20.0
80.0
60.0
40.0
Open
Loop G
ain
(d
B)
100
-100
-80.0
-60.0
-40.0
-20.0
0.0
Ph
ase
(d
eg)
-180.0
-225.0
-270.0
-135.0
-360.0
-315.0
-45.0
-90.0
180.0
135.0
0.0
45.0
90.0
NamVis3d
Frequency (Hz)10
110
010
210
410
310
510
610
710
810
910
10
35.4858udB
45.86191deg
Unity Gain
179.9968deg
80.22635dB
DC Gain
134.8967deg
77.22662dB
3dB Frequency
AI & NK, 10/31/2014
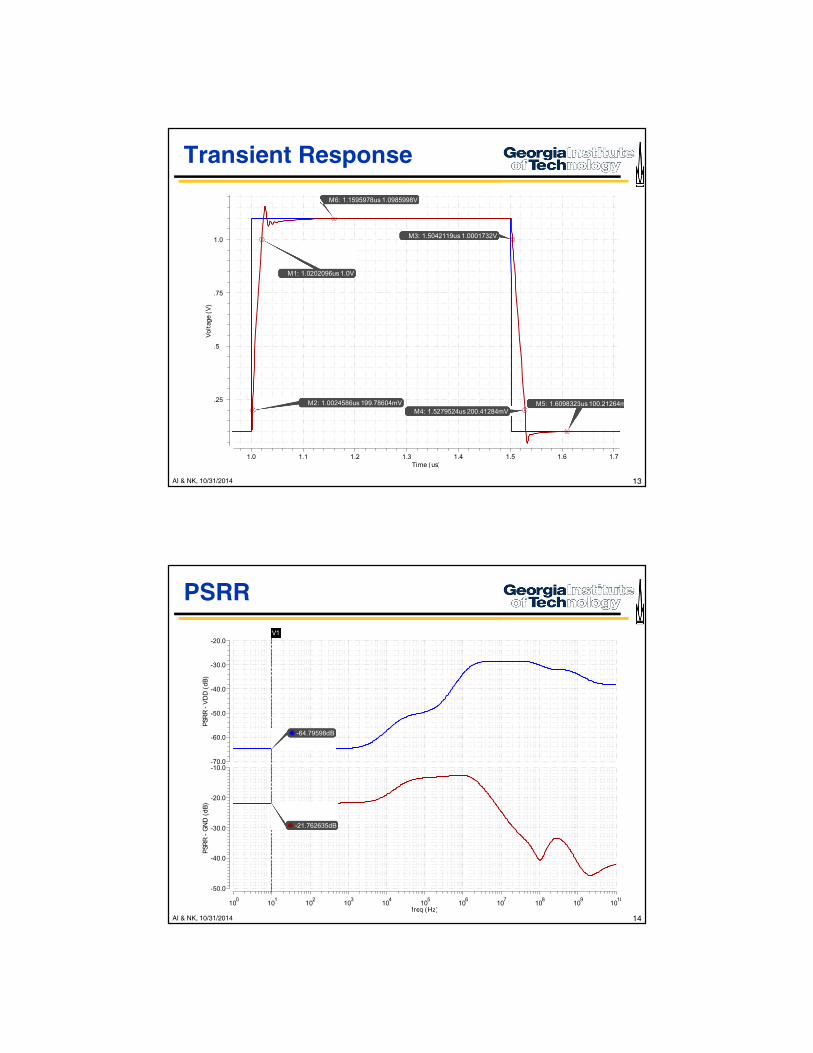
Input and Output Swing
12
Min Input: (55.929347mV, 990.0m)
Max Input: (1.1597325V, 990.0m)
.75
0.0
.25
.5
Vou
t (B
uff
er)
(V
)
1.25
-.25
1.0
.5
dV
ou
t/d
Vin
0.0
.25
1.25
.75
1.0
-.25
Max Output: 1.0756326V
Min Output: 58.881285mV
7.5
-2.5
2.5
dV
ou
t/d
Vin
12.5
5.0
0.0
10.0
-.25
.25
1.25
1.0
.5
0.0
.75
Vo
ut
(Non
-In
vert
ing A
mp
lifi
er,
A =
10
) (V
)
1.0 1.25 1.5
Vin (V)
-.25 0.0 .25 .5 .75
AI & NK, 10/31/2014
Transient Response
13
M1: 1.0202096us 1.0V
M6: 1.1595978us 1.0985998V
M2: 1.0024586us 199.78604mV
M4: 1.5279524us 200.41284mV
M3: 1.5042119us 1.0001732V
M5: 1.6098323us 100.21264m
1.0
Vo
ltag
e (
V)
.25
.5
.75
1.7
Time (us)
1.4 1.5 1.61.0 1.1 1.2 1.3
AI & NK, 10/31/2014
PSRR
14
-30.0
-40.0
-50.0
-10.0
-20.0
PS
RR
- G
ND
(d
B)
-20.0
PS
RR
- V
DD
(d
B)
-70.0
-60.0
-50.0
-40.0
-30.0
freq (Hz)10
010
110
210
310
410
510
610
710
810
910
10
-21.762635dB
-64.79598dB
V1
AI & NK, 10/31/2014
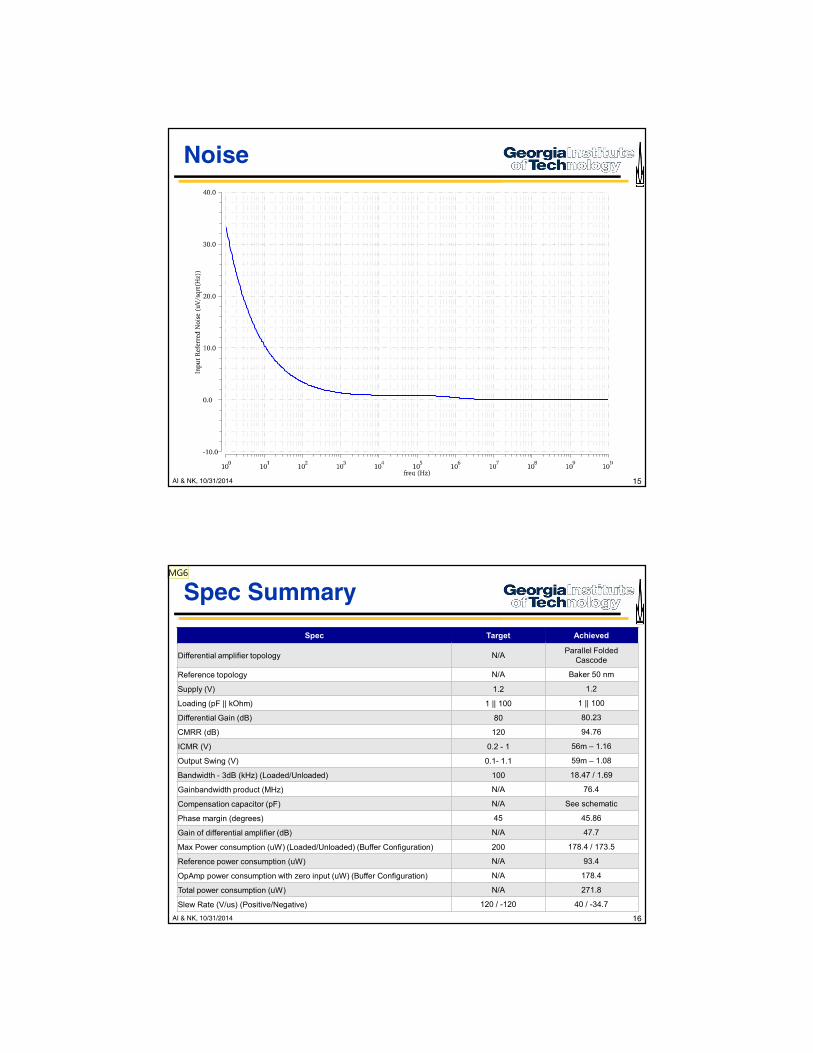
Noise
15
AI & NK, 10/31/2014 16
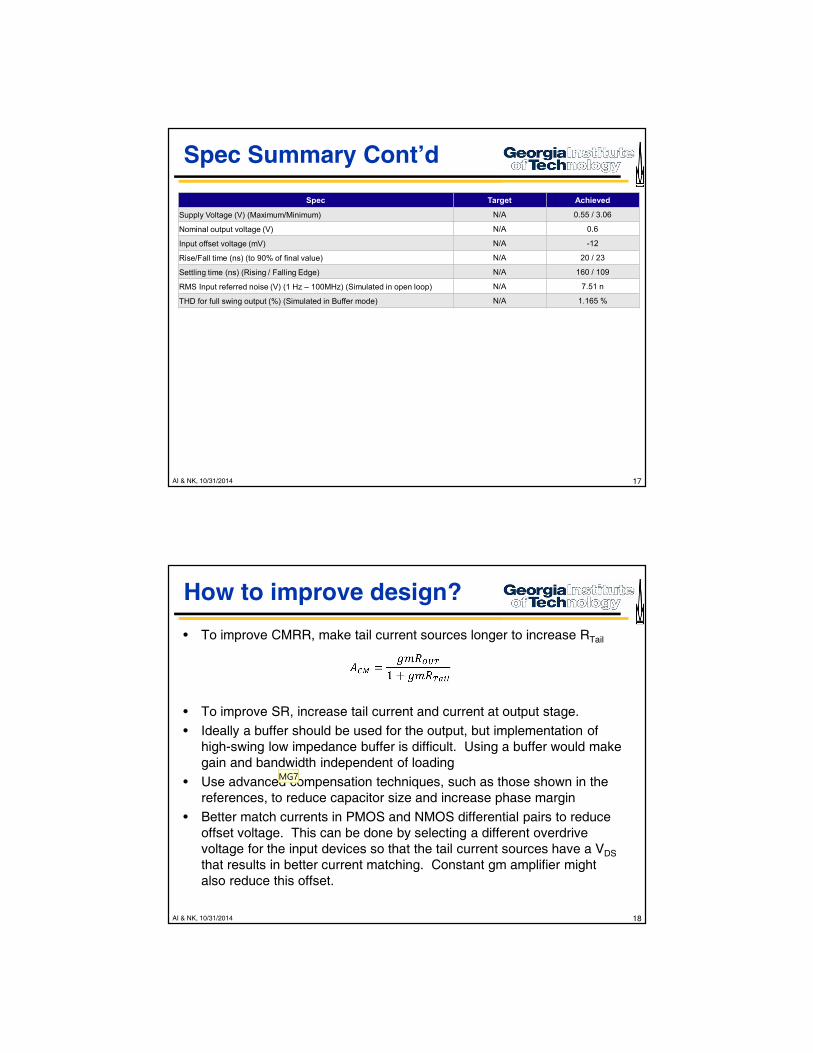
Spec Summary
Spec Target Achieved
Differential amplifier topology N/AParallel Folded
Cascode
Reference topology N/A Baker 50 nm
Supply (V) 1.2 1.2
Loading (pF || kOhm) 1 || 100 1 || 100
Differential Gain (dB) 80 80.23
CMRR (dB) 120 94.76
ICMR (V) 0.2 - 1 56m – 1.16
Output Swing (V) 0.1- 1.1 59m – 1.08
Bandwidth - 3dB (kHz) (Loaded/Unloaded) 100 18.47 / 1.69
Gainbandwidth product (MHz) N/A 76.4
Compensation capacitor (pF) N/A See schematic
Phase margin (degrees) 45 45.86
Gain of differential amplifier (dB) N/A 47.7
Max Power consumption (uW) (Loaded/Unloaded) (Buffer Configuration) 200 178.4 / 173.5
Reference power consumption (uW) N/A 93.4
OpAmp power consumption with zero input (uW) (Buffer Configuration) N/A 178.4
Total power consumption (uW) N/A 271.8
Slew Rate (V/us) (Positive/Negative) 120 / -120 40 / -34.7
MG6
AI & NK, 10/31/2014 17
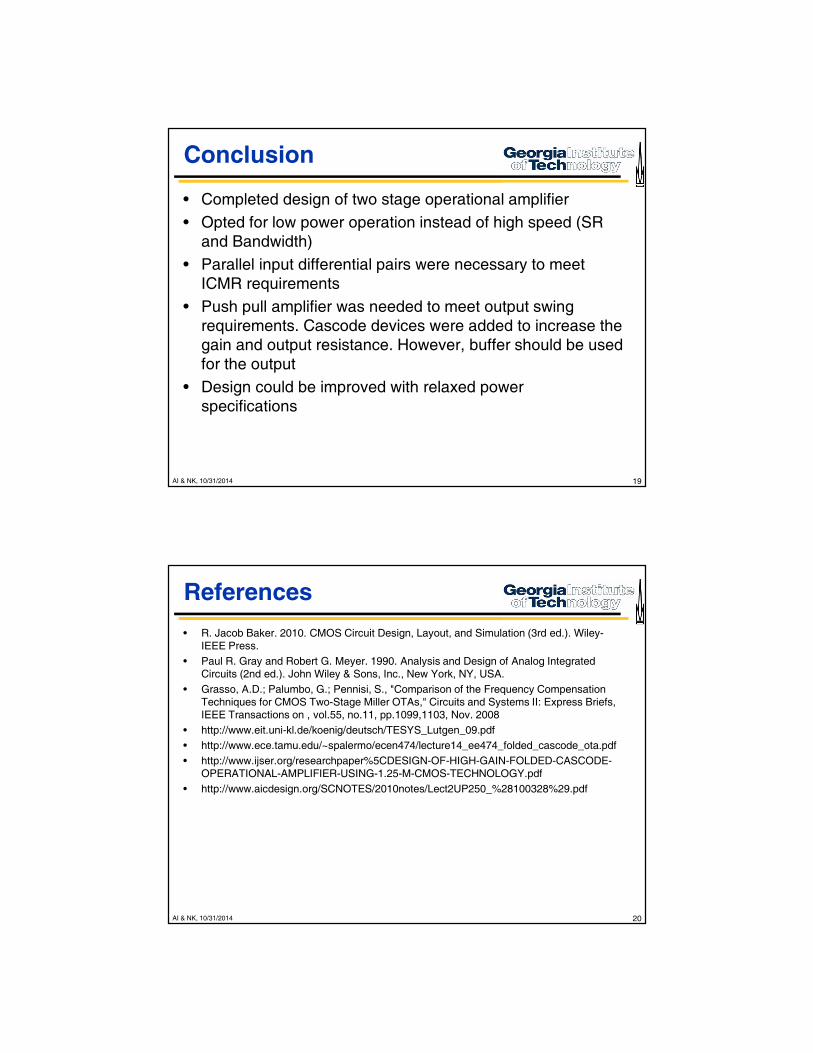
Spec Summary Cont’d
Spec Target Achieved
Supply Voltage (V) (Maximum/Minimum) N/A 0.55 / 3.06
Nominal output voltage (V) N/A 0.6
Input offset voltage (mV) N/A -12
Rise/Fall time (ns) (to 90% of final value) N/A 20 / 23
Settling time (ns) (Rising / Falling Edge) N/A 160 / 109
RMS Input referred noise (V) (1 Hz – 100MHz) (Simulated in open loop) N/A 7.51 n
THD for full swing output (%) (Simulated in Buffer mode) N/A 1.165 %
AI & NK, 10/31/2014
• To improve CMRR, make tail current sources longer to increase RTail
• To improve SR, increase tail current and current at output stage.
• Ideally a buffer should be used for the output, but implementation of
high-swing low impedance buffer is difficult. Using a buffer would make
gain and bandwidth independent of loading
• Use advanced compensation techniques, such as those shown in the
references, to reduce capacitor size and increase phase margin
• Better match currents in PMOS and NMOS differential pairs to reduce
offset voltage. This can be done by selecting a different overdrive
voltage for the input devices so that the tail current sources have a VDS
that results in better current matching. Constant gm amplifier might
also reduce this offset.
18
How to improve design?
MG7
AI & NK, 10/31/2014
• Completed design of two stage operational amplifier
• Opted for low power operation instead of high speed (SR
and Bandwidth)
• Parallel input differential pairs were necessary to meet
ICMR requirements
• Push pull amplifier was needed to meet output swing
requirements. Cascode devices were added to increase the
gain and output resistance. However, buffer should be used
for the output
• Design could be improved with relaxed power
specifications
19
Conclusion
AI & NK, 10/31/2014
• R. Jacob Baker. 2010. CMOS Circuit Design, Layout, and Simulation (3rd ed.). Wiley-IEEE Press.
• Paul R. Gray and Robert G. Meyer. 1990. Analysis and Design of Analog Integrated Circuits (2nd ed.). John Wiley & Sons, Inc., New York, NY, USA.
• Grasso, A.D.; Palumbo, G.; Pennisi, S., "Comparison of the Frequency Compensation Techniques for CMOS Two-Stage Miller OTAs," Circuits and Systems II: Express Briefs, IEEE Transactions on , vol.55, no.11, pp.1099,1103, Nov. 2008
• http://www.eit.uni-kl.de/koenig/deutsch/TESYS_Lutgen_09.pdf
• http://www.ece.tamu.edu/~spalermo/ecen474/lecture14_ee474_folded_cascode_ota.pdf
• http://www.ijser.org/researchpaper%5CDESIGN-OF-HIGH-GAIN-FOLDED-CASCODE-OPERATIONAL-AMPLIFIER-USING-1.25-M-CMOS-TECHNOLOGY.pdf
• http://www.aicdesign.org/SCNOTES/2010notes/Lect2UP250_%28100328%29.pdf
20
References