Embed Size (px)
Citation preview

Progress Report on SRME with an Iterative Adaptive Subtraction Filter
Shengdong Liu
ABSTRACT
In this report, I present an iterative method for water-layer multiple elimination. For the multiple prediction,a phase-shift extrapolation method is used to propa-gate the observed data downward to the water bottomand upward to the free surface. After that, an iter-ative adaptive subtraction filter is used to eliminatemultiples with less primary energy removal. Numericalresults suggest that the primary reflection can be effec-tively preserved by the iterative method, compared tothe one-pass adaptive subtraction filter.
INTRODUCTION
Primary-preserving multiple removal is important for im-proving the quality of seismic imaging, because most seis-mic processing algorithms are based on the assumption ofprimary reflections. There are various techniques to at-tenuate the water-layer multiples in marine seismic data,such as predictive deconvolution, f −k and τ −p filtering,and wave-equation based methods ( Berryhill and Kim,1986; Wiggins, 1988; Verschuur et al., 1992; Berkhoutand Verschuur, 1997; Verschuur and Berhout, 1997). Thewave-equation based methods consist of two steps: multi-ple prediction and adaptive subtraction. In this research,the phase shift method is used to predict the water-layermultiples. Jiao et al.(2002) and He (2004) successfullyapplied the phase-shift method for multiple prediction in2D field data. Once the predicted multiples are obtained,the subtraction of predicted multiples from the raw datais carried out by a matching filter, which is designed tomatch the predicted multiples to the actual data in a least-square sense. However, the danger of the matching filteris that there is no guarantee that the primaries will notbe removed with multiples (Abma, et al., 1999). In thefollowing, we propose an iterative subtraction method in-stead of the one-pass adaptive subtraction to achieve the
preservation of the primary energy.
MULTIPLE PREDICTION
Given the water velocity c and water bottom depth Z(x),multiple estimation can be obtained by various methods,such as Kirchhoff summation(Berryhill, 1984), phase-shiftextrapolation (He, 2003), or other methods. In this re-search, the phase-shift method is used to predict the mul-tiples. The data wavefield is first extrapolated to the wa-ter bottom Z(x) by the phase-shift operator:
W (t, x; z = Z(x))
=1
(2π)2
∫ ∞
−∞
∫ ∞
−∞D̃(ω, kx)
exp(i(ωt + kxx + kz(ω, kx)Z(x)))dkxdω, (1)
where W (t, x; z = Z(x)) is the extrapolated wavefield atthe water bottom, D̃(ω, kx) is the f − k transform of theoriginal data recorded at the surface z = 0, and
kz(ω, kx) = sgn(ω)
√ω2
c2− kx
2. (2)
If we obtain the extrapolated wavefield at the waterbottom, we can extrapolate it back to the z = 0 line by
m(t, x; z = 0)
=1
(2π)2
∫ ∞
−∞
∫ ∞
−∞W̃ (ω, kx)
exp(i(ωt + kxx− kz(ω, kx)Z(x)))dkxdω, (3)
where m(t, x; z = 0) represents the predicted water-bottommultiple of a certain order, and W̃ (ω, kx) is the f−k trans-form of the extrapolated wavefield at the water bottomz = Z(x).
215

216 Liu
ADAPTIVE SUBTRACTION WITHMATCHING FILTER
The adaptive subtraction fj(t) can be represented as (e.g.,Wang, 2003)
p(t) = d(t)−N∑
j
fj(t) ∗mj(t). (4)
where d(t) is a raw data trace, mj(t) represents the pre-dicted multiple traces, N is the number of channels in-volved in matching, fj(t) are the subtraction operators,and p(t) is the multiple suppressed result. The equation 4can be written more compactly in matrix-vector notation(e.g., Rickett et al., 2001):
p = d−Mf. (5)
where M represents convolution matrix, f is the filter vec-tor with elements fj(t) , and Mf is the filtered multiplesfor subtraction. The matching filter f is calculated usingthe minimum energy criterion in a least-squared sense.From equation 5, we have the following system of normalequations for the optimal matching filter:
MT Mf = MT d. (6)
The regularized inversion can be represented as
f = (MT M + εI)−1
MT d. (7)
However, the problem with equation 6 is the assump-tion that primarites and multiples have to be orthogonal(Spitz,1999; Luo et al., 2003). This assumption will be vi-olated in most real data sets, and the matching filter oftenoversubtracts the multiples and harms the primaries. Toavoid this danger, we should rewrite the normal equationas following:
MT Mf = MT (d− p). (8)
Once the matching filter f (0) is obtained from equation7, equation 5 can be plugged into the equation 8. And wecan obtain the iterative form:
f (k) = (MT M + εI)−1
MT (d− p)
= (MT M + εI)−1
MT Mf (k−1). (9)
NUMERICAL TEST
Overlap Data
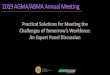
First, We test the overlap data, similar with the test inWang’s (2003) paper in Figure 1, where (a) is the originaldata where a primary and a multiple reflection overlap;(b) is the predicted multiple, which is added 40% am-plitude and 10% phase shift random error to the multipleevent in the original gather; (c) is the non-iterative demul-
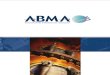
tiple result; (d) is the subtracted energy from the originalgather after one iteration;(e) is the demultiple result us-ing the multichannel matching filter for twenty iterations;(f) is the subtracted energy from the original gather af-ter twenty iterations. The matching filter suffers from theproblem that it cannot separate the primary energy formthe multiple energy around the overlap zone in Figure (c).However, it can be seen that a significant portion of theprimary energy has been preserved after twenty iterations,and a good continuity of the primary event is obtained.Figure 2 show the waveform comparison around the over-lap zone between non-iterative and iterative result, wherethe waveform was recovered effectively after twenty itera-tions.
Layered Model
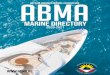
We apply the iterative method to the multi-source datasynthesized from the simple layered model. Figure 3(a)shows the velocity model and Figure 3(b) shows one shotgather where surface-related multiples can be clearly seen,and lots of multiples interfere with the primaries. Fig-ure 3(c) is the modeled multiples. Figure 4(a) shows theoriginal data without multiples, Figure 4(b) shows thenon-iterative demultiple result, and Figure (c) shows theiterative demultiple result. In Figure 4(b), the primaryreflections around 3s seems very unclean, which is over-subtracted in this region. The iterative result after fiveiterations in Figure 4(c) (f) is much cleaner than the non-iterative one Figure 5 shows the trace waveform compar-ison in the overlap zone at 2.8s around 0 200m. The it-erative result is very closed to the original gather withoutmultiples.
Sigsbee Model
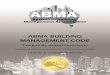
We also apply the iterative method to a complex datasynthesized from the Sigsbee model. Figure 6 shows thedemultiple data with the straightforward and iterativemethod. These data were then imaged by Kirchhoff mi-gration method, We can see that some events in the bot-tom in Figure 7(d) are clearer than those in Figure 7(c).
DISCUSSION
I presented an iterative demultiple method and appliedit to three synthetic data sets to eliminate the multipleartifacts. After several iterations, the multiples can beattenuated effectively with only small primary energy re-moval around the primary-multiple overlap. In the future,I will apply this method to the multiple elimination of fielddata. The method can be also applied to the surface waveremoval. However, there are also some disadvantages: (1)Although the system of normal equations is a linear setof equations, which seems not have to calculate the in-verse matrix every time, it needs a lot of memory to savethe matrix, which depend on the time window size andwindow slip speed. In my case, I calculate the inverse

Demultiple 217
matrix every time. (2) A good continuity of the primaryevent can be obtained around the overlap zone, but the re-covered amplitude is not perfectly matched with the inputprimary even for fifty iterations. Are there any constraintsto make the matching better?
REFERENCES
Abma, R., N. Kabir, K. H. Matson, S. Michell, S. Shaw,and B. McLain, 2005, Comparisons of adaptive sub-traction methods for multiple attenuation: The Lead-ing Edge, 24, 277280.
Berryhill J. R. and Kim Y.C., 1986, Deep-water peglegs and multiples: emulation and suppression: Geo-physics, 51, 2177-2184.
He, R, and Zhou, M, 2003, Demultiple By Multi-Channel-Prediction Filters and Median Filters UTAM 2004Annual report.
He, R., 2003, Wavefield prediction of water-layer multi-ples: UTAM 2003 Annual report.
He, R., 2004, Topographic phase-shift migration of theMapleton data: UTAM 2004 Annual report.
Jiao, J., Leger, P., and Stevens, J., 2002, Enhancementsto wave-equation multiple attenuation: 72th AnnualInternational Meeting, SEG, Expanded Abstract, 2098-2101.
Luo, Y., P. Kelamis, and Y. Wang, 2003, Simultaneousinversion of multiples and primaries: Inversion ver-sus subtraction: The Leading Edge, 22, 814819.
Reshef, M., 1991, Depth migration from irregular surfacewith depth extrapolation methods: Geophysics, 56,119-122.
Rickett, J., A. Guitton, and D. Gratwick, 2001, Adap-tive multiple subtraction with non-stationary helicalshaping filters: Presented at the 63rd Annual Inter-national Meeting, EAGE.
Spitz, S., 1999, Pattern recognition, spatial predictiv-ity, and subtraction of multiple events: The LeadingEdge, 18, 5559.
Verschuur, D.J., Berkhout, A.J., and Wapenaar, C.P.A.,1992, Adaptive surface-related multiple elimination:Geophysics, 57, 1166-1177.
Wang, Y., 2003, Multiple subtraction using an expandedmultichannel matching filter: Geophysics, 68, 346354.
Weglein A. B., Gasparotto F. A., Carvalho P. M. andStolt R. H., 1997, An inverse-scattering series methodfor attenuating multiples in seismic reflection data:Geophysics, 62, 1975-1989.
Wiggins W. J., 1988 Attenuation of complex water-bottommultiples by wave-equation-based prediction and sub-traction: Geophysics, 53, 1527-1539.

218 Liu
X (m)
Tim
e (s
)a) Original data
10 20 30 40 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
X (m)
Tim
e (s
)
b) Predicted multiples
10 20 30 40 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
X (m)
Tim
e (s
)
c) Desired primary after one iteration
10 20 30 40 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
X (m)
Tim
e (s
)
d) Subtracted data after one iteration
10 20 30 40 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
X (m)
Tim
e (s
)
e) Desired primary after twenty iterations
10 20 30 40 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
X (m)
Tim
e (s
)
f) Subtracted data after twenty iterations
10 20 30 40 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Figure 1: Adaptive subtraction of overlap data. (a) the original data window where the primary and multiple reflectionsoverlaps; (b) predicted multiple, which is added 40% amplitude and 10% phase shift random error to the multiple eventin the original gather; (c) and (d) are desired primary and subtracted data after one iteration. (e) and (f) are desiredprimary and subtracted data after twenty iterations.

Demultiple 219
26 28 30 32 34 36 38
0.3
0.35
0.4
0.45
0.5
0.55
0.6
Tim
e (s
)
X (m)
Waveform Comparison
Figure 2: Waveform comparison around the overlap zone.Blue line denotes the input primary, red line denotes theestimated primary after one iteration, and black line de-notes the estimated primary after twenty iterations.

220 Liu
X (m)
Velocity model
1000 2000 3000
1500 2000 2500
X (m)
Tim
e (s
)
Original data with mutiples
500 1000 1500 2000 2500 3000
1
2
3
4
5
6
X (m)
Tim
e (s
)
Predicted multiples
500 1000 1500 2000 2500 3000
1
2
3
4
5
6
Figure 3: Adaptive subtraction of multi-source data synthesized from the layered model. (a) velocity model; (b) originaldata with multiples; (c) predicted multiples.
X (m)
Original data without mutiples
500 1000 1500 2000 2500 3000
X (m)
Tim
e (s
)
Desired primary after one iteration
500 1000 1500 2000 2500 3000
1
2
3
4
5
6
X (m)
Tim
e (s
)Desired primary after five iterations
500 1000 1500 2000 2500 3000
1
2
3
4
5
6
Figure 4: Demultiple results of non-iterative and iterative method. (a) input data without multiples; (b) demultipleresult after one iteration; (c) demultiple result after five iterations.

Demultiple 221
50 60 70 80 90
2.6
2.7
2.8
2.9
3
3.1
3.2
3.3
3.4
Tim
e (s
)
X (m)
Waveform Comparison
Figure 5: Waveform comparison around the overlap zonearound 2.8s. Blue line denotes the input primary, red linedenotes the estimated primary after one iteration, andblack line denotes the estimated primary after five itera-tions.

222 Liu
X (m)
One CSG of original data
1000 2000 3000 4000 5000 6000
X (m)T
ime
(s)
b)Predicted multiples
1000 2000 3000 4000 5000 6000
1
2
3
4
5
6
X (m)
Demultiple result after one iteration
1000 2000 3000 4000 5000 6000
X (m)
Tim
e (s
)
d)Demultiple result after five iterations
1000 2000 3000 4000 5000 6000
1
2
3
4
5
6
Figure 6: Demultiple results of non-iterative and iterative method. (a) input data without multiples; (b) predictedmultiples; (c) demultiple result after one iteration.(d) demultiple result after five iterations.

Demultiple 223
X (m)
Velocity model
1000 2000 3000 4000 5000 6000
X (m)
Tim
e (s
)
b)KM image of original data
1000 2000 3000 4000 5000 6000
500
1000
1500
2000
2500
3000
3500
X (m)
Km image of non−iterative demultiple data
1000 2000 3000 4000 5000 6000
X (m)
Tim
e (s
)
d)Km image of iterative demultiple data
1000 2000 3000 4000 5000 6000
500
1000
1500
2000
2500
3000
3500
1600 1800 2000 2200 2400 2600
Figure 7: KM image of demultiple data. (a) velocity model. (b) KM image of original data. (c) KM image of non-iterativesubtraction data. (d) KM image of iterative subtraction data.