Embed Size (px)
Citation preview

g h e o l o g i c f l A c l f l Rheol Acta 29:556-570 (1990)
Progress and challenges in computational rheology*)
R. Keunings
Unit6 de M6canique Appliqu6e, Universit6 Catholique de Louvain, Louvain-la-Neuve, Belgium
Abstract: Our research work over the last few years serves to illustrate the basic issues associated with the numerical prediction of rheologically-complex flows, with particular emphasis on viscoelastic fluids. Numerical challenges in this field are shown to be tightly coupled to the mathematical nature of the governing equations, as well as to fundamental physical issues such as flow behavior close to wails and singularities.
Key words: Numerical simulation; viscoelastic fluids; finite element techniques
1. Introduction In the present paper, we wish to review some of the
main issues associated with viscoelastic flow simula- tions, whether they be of physical, mathematical , or numerical nature. The discussion is based on our own research activity over the last few years. Detailed reviews of available numerical techniques and pub- lished numerical simulations can be found in [1 - 2 ] . The present paper is a brief summary of the main ideas that we developed in [1], although some of our new results have been incorporated for the sake of il- lustration.
We begin in Sect. 2 with a discussion of the mathe- matical models that are of current use in numerical work, with particular emphasis on differential consti- tutive equations. The hyperbolic character of the governing equations is shown to be one of the most important features of viscoelastic flow formulations. Section 3 is devoted to the problem of computing viscoelastic stresses on the basis of given kinematics. This apparently simple task serves to demonstrate some of the sources for numerical difficulties in visco- elastic calculations, such as the presence of stress boundary layers and singularities. It also illustrates the importance of numerical issues like stability and convergence with mesh refinement. The solution of the complete set of governing equations is the subject
*) Delivered as a Keynote Lecture at the Golden Jubilee Conference of the British Society of Rheology and Third European Rheology Conference, Edinburgh, 3 - 7 Septem- ber, 1990.
of Sect. 4. The issue of obtaining reliable solutions at high values of elasticity is related to the qualitative non-linear behavior of the solutions and to the phys- ics of the flow close to solid boundaries and singulari- ties. Finally, we briefly review two recent successful simulations of viscoelastic flow problems endowed with smooth solutions. One is related to steady-state co-flow of immiscible fluids, while the other is a study of the breakup process of free jets. The success of these simulations shows that conventional numerical techniques and simple constitutive equations can be useful in the simulation of laboratory flow pheno- mena involving moderate deformation rates.
2. Mathematical models
2.1 Governing equations
In the f ramework of continuum mechanics, the mathematical description of viscoelastic flow consists of conservation laws, constitutive equations, and suitable boundary and initial conditions. The conser- vation laws for the case of isothermal incompressible flows read
V .v = 0 . (2)
Here, p is the pressure, I is the unit tensor, T is the extra-stress tensor, v is the velocity vector, f is the body force per unit mass of fluid, and ~ is the fluid density. The set of Eqs. (1 - 2) must be closed with a

Keunings, Progress and challenges in computational rheology 557
constitutive model that relates the extra-stress T to the deformation experienced by the fluid. The selection of an appropriate viscoelastic constitutive equation, whether of the differential or integral type, remains a difficult problem (see, e.g., [3]). None of the current- ly available models leads to realistic predictions in all types of deformation for any particular polymeric fluid. This, of course, is in marked contrast to Newto- nian fluid mechanics, where the mathematical for- mulation of the flow is well established. Published viscoelastic flow simulations have, for the most part, been based on differential models [1]. Those models have the generic form
T = TN+ T v , (3)
T N = 2PND , (4)
A (Tv; 2 ) . T v + 2 oTv = 2 p v D , (5) Ot
where T u and T~ are, respectively, the Newtonian and viscoelastic contributions to the extra-stress. The purely-viscous component T N is usually interpreted as the solvent contribution to the stress in polymeric solutions, or as the stress response associated to very fast relaxation modes [4]. As discussed in Sect. 2.2, the presence of a purely-viscous component has much impact on the mathematical nature of the set of governing Eqs. (1-5). Indeed, viscoelastic models wi thou t a viscous component can exhibit a variety of hyperbolic phenomena, including change of type and propagation of waves [5]. We have written the dif- ferential Eq. (5) for a single pair of relaxation time 2 and viscosity coefficient pv. The Newtonian stress in- volves a viscosity coefficient PN and the rate of strain tensor D = ~ ( V v + V v r ) . The symbol A in Eq.(5) denotes a model-dependent tensor function which is equal to the unit tensor for a vanishing relaxation time. Finally, the operator O/fit is an objective time derivative defined as a linear combination of lower- and upper-convected derivatives. We have
OT v A V - a T o + ( l - a ) T ~ 0___a_<l , (6)
6t
A V where To and T v are, respectively, the lower- and up- per-convected derivatives of the viscoelastic extra- stress defined by
~ = OT~+ v . V T v + T v ' V v r + V v . Tv (7)
Ot
V T~ = 0T~+ v'VT~- r~'Vv- Vvr" T~. (8)
0t
The generic consitutive model (Eqs. 3 - 5) contains as special cases the simple Maxwell and Oldroyd equa- tions, as well as the more sophisticated non-linear models due, for example, to Giesekus, Leonov or Phan-Thien and Tanner [1]. It is readily extended to the case of a spectrum of n relaxation times by writing
n
Tv = 2 Tv, i , ( 9 ) i = 1
where each partial extra-stress Tv, i obeys (Eq. 5) with material coefficients 2i and Pv, i"
Differential models of the form (Eq. 5) are implici t in the extra-stress T v. Indeed, this is true of all dif- ferential models capable of predicting memory ef- fects. As a result, it is impossible to eliminate the ex- tra-stress from the momentum Eq. (1), as one does in the Newtonian case to derive the Navier-Stokes equa- tions. For flows in confined geometries, the unknown fields are thus the extra-stress Tv, the velocity v, and the pressure p. We should also emphasize that any fluid flow problem described by (Eqs. 1 - 5) is in- herently non-linear, even in the limit of creeping flow. This is due in part to the non-linear coupling between extra-stress and velocity in the definition of the con- vected derivatives.
2.2 Mathemat i ca l analysis
In view of the high non-linearity of the governing equations, it is not surprising that no complete mathematical theory is available on the existence and uniqueness of viscoelastic flows. Important results have been obtained recently, however, regarding the mathematical type of the governing equations [5]. In particular, the equations governing steady two- dimensional flows of viscoelastic fluids wi thou t a Newtonian component (i.e. p x = 0 in Eq. (4)) con- stitute a first-order quasilinear system of m i x e d type. This means that the system of partial differential Eqs. (i -5) is never strictly elliptic nor strictly hyper- bolic. There are always imaginary (i.e., elliptic) char- acteristic directions associated with incompressibility; the streamlines constitute a family of real (i.e., hyper- bolic) characteristics associated with the convective derivative; finally, the remaining characteristics are elliptic for sufficiently slow flows, but can change type (i.e., become real) in flow regions where a model- dependent criterion is satisfied; for most constitutive models, these characteristics are associated with the

558 Rheologica Acta, Vol. 29, No. 6 (•990)
vorticity. Another hyperbolic phenomenon that can arise with viscoelastic models devoid of a Newtonian component is the loss o f evolution of the governing equations, i.e., the illposedness of the Cauchy initial value problem governing the evolution of perturba- tions of arbitrary motions. The loss of evolutions is an instability of the Hadamard type in which short- wave disturbances sharply increase in amplitude. Some researchers argue that many interesting flow phenomena observed with viscoelastic fluids (e.g., delayed die-swell and melt fracture) may be caused by changes of type and loss of evolution [6].
Viscoelastic models with a Newtonian component cannot show change of type or loss of evolution since Eq. (4) brings second-order spatial derivatives of the velocity field into the momentum Eq. (1). The govern- ing equations do have, however, some degree of hyperbolicity through the constitutive Eq. (5). In- deed, in steady-state problems and for a given velocity field, the generic differential viscoelastic model Eq. (5) can be cast in the form
1 v . v r ~ = v B(r~ , Vv) , (lO)
X
where B is a model-dependent tensor function. Equa- tion (10) constitutes a set of first-order hyperbolic equations for the components of T v, whose charac- teristic curves are the streamlines.
The hyperbolic character of viscoelastic governing equations presents significant numerical challenges that are not addressed by classical techniques for computing highly,viscous Newtonian flows. We shall illustrate this point in Sect. 3.
2.3 Boundary conditions
Another integral part of the modeling process is the selection of appropriate boundary conditions. This step is a complex one for both physical and mathe- matical reasons. The fluid memory requires that the pre-history of the motion be specified in the analysis of flow problems with inlet boundaries. If known at all, the motion pre-history can be as complex as the flow problem under investigation. A second difficulty is related to the behavior of polymeric liquids near solid boundaries. In the analysis of highly-viscous Newtonian flows, it is generally appropriate to assume that the fluid sticks to solid boundaries. Such may not always be the case with viscoelastic fluids. Actually, flow phenomena associated with viscoelas- tic fluids (including low Reynolds number instabili- ties) may well find their origin, not only in the non-
Newtonian character of the bulk flow, but also in slip mechanisms at solid boundaries. It should be pointed out in that regard that the molecular theories leading to the macroscopic constitutive models used to date in numerical simulations do not take into account the in- teractions between polymer molecules and solid boundaries.
From a mathematical viewpoint, the specification of boundary conditions is connected to the mathemat- ical type of the governing equations. General mathe- matical results are not yet available for the case of vis- coelastic flows. In particular, the impact of changes of type on the nature of boundary conditions remains to be analyzed. For Newtonian fluids, the extra-stress can be eliminated from the momentum equations to yield the Navier-Stokes equations. This procedure reduces the set of unknown fields to the velocity vec- tor and pressure. As far as boundary conditions are concerned, one must specify the velocity components or the surface traction along the boundary of the computational domain. As mentioned previously, the concept of memory fluids clearly suggests that the above boundary conditions are not sufficient in a viscoelastic flow problem that contains an inlet boundary. Indeed, the flow inside the computational domain is affected by the motion pre-history, i.e., by the deformations experienced by the material up- stream of the inlet boundary. Available mathematical results valid for differential fluids without a New- tonian component [7] indicate that some (though not all) of the components of the viscoelastic extra-stress Tv must be specified at an inflow boundary. No in- formation on the flow pre-history is required, except what is implicit in the specification of those inlet ex- tra-stresses. The need for inlet extra-stress conditions implies that the Newtonian limit (3. = 0) generally is singular in the sense of perturbation theory.
3. Computation of viscoelastic stresses
3.1 Global and local numerical techniques
Before discussing the numerical solution of the full set of governing Eqs. (1 -5) , let us first focus on an apparently simpie problem, namely the computation of viscoelastic extra-stresses on the basis of a given, steady-state, two-dimensional velocity field. To this end, one must integrate the first-order hyperbolic constitutive Eq. (10) with suitable inlet extra-stress conditions. We have recently compared several discretization methods for performing such calcula- tions [8]. The results of this study are briefly reviewed

Keunings, Progress and challenges in computational rheology 559
here since they raise some of the fundamental issues that are relevant to the solution of the complete set of governing equations.
The most natural way to solve first-order hyper- bolic partial differential equations is to transform the problem into ordinary differential equations that are integrated along individual characteristics. In the pre- sent context, the characteristics are the streamlines. We can write the constitutive model Eq. (10) as
_d r 1 Ivl = ~ B ( T v , Vv) ,
ds A (11)
where s is the arc length along a streamline. Streamline Integration is a method whereby the con- stitutive law (Eq. 11) is numerically integrated along individual streamlines. Integration starts at an upstream location where Tv is known, and is con- tinued until a desired point in space is reached. For- mally, streamline integration amounts to the follow- ing computational task
Tvlsl = Tvlso + ~ a(Tv, Vv)ds , (12) SO
where the integral sign denotes a streamline integra- tion operator, and So and s a refer, respectively, to upstream and downstream locations along the streamline. When the given velocity field is obtained by means of a separate finite element calculation, the computation of the integral in Eq. 02) requires that each individual streamline be constructed through the finite element mesh from s o to the desired location sa. This task is conceptually simple, but very tedious to implement in a computer code. We used a second- order accurate predictor/corrector scheme to in- tegrate Eq. (12) along the constructed streamlines. The algorithm automatically adjusts the step size along the streamline such that a measure of the local discretization error is kept below a user-defined toler- ance [8].
Streamline Integration is a local numerical tech- nique in the sense that it produces extra-stress values along individual streamlines. Viscoelastic extra-stress integrators used in complete viscoelastic simulations are mostly based on finite element techniques. These are global methods which compute at once an approx- imation of the extra-stress over the whole computa- tional domain. The extra-stress is sought in the ap- proximated form
N r* ~ i (13) = Tv •i ,
i = 1
where the q~i's are given finite element shape func- tions, while the symbols T~ denote unknown nodal values of the viscoelastic extra-stress. Algebraic equa- tions for the nodal values are then generated by means of a suitable discretization principle. The standard Galerkin approach, used until recently by most authors in this field [1], consists of substituting the approximation (Eq. 13) into the constitutive Eq. (10), and forcing the resulting residuals to be orthogonal to the set of basis functions. One thus obtains
I¢i; V" VT* v - ~ B ( T * , V v ) ) = O
for i= 1,2 . . . . N , (14)
where the brackets (;) denote the L 2 inner product over the flow domain. Equations (14) form a set of N algebraic equations for the extra-stress nodal values. Available mathematical results as well as a great deal of numerical experiments have shown that it is a challenge to design finite element techniques that en- joy high-order accuracy and good stability properties in the solution of hyperbolic problems. Indeed, the mathematical analysis given in [9] for linear first- order hyperbolic systems shows that Galerkin finite element methods are formally accurate but unstable, i.e., they tend to produce oscillatory results unless the exact solution is globally smooth. One way of stabiliz- ing the results is to use upwind schemes. Instead of Eq. (10), upwind schemes essentially amount to solve the modified problem
v.VTv = ~ B(Tv, Vv) + V. (g. VT,) , (15)
by means of the Galerkin principle. The symbol K in Eq. (15) denotes an artificial diffusivity tensor whose magnitude is of the order of the characteristic finite element size h. Modifying the original problem in this manner has the consequence of limiting the con- vergence rate to, at most, first order, whatever the degree of the polynomial basis functions q~i. As shown in [10], upwind finite element techniques based on isotropic artificial diffusivity tensors produce smooth but inaccurate solutions; typically, the numerical results are excessively smoothed out in the direction transverse to the main flow. The problem of crosswind diffusion is addressed in the Streamline Upwind method [10], where the artificial diffusivity acts in the streamwise direction only. The streamline upwind artificial diffusivity tensor thus reads

560 Rheologica Acta, Vol. 29, No. 6 (1990)
I X
no-slip
-y >
>
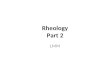
slip Fig. 1. Planar stick-slip flow. Partial view of the finite element mesh used in the calculations based on Newtonian kinematics. Also shown are the streamlines q/= 0.432 and q/= 0.056; the streamfunction ~ equals 0 on the stick-slip boundary and 1 on the plane of symmetry. Fully-developed Poiseuille flow conditions are specified 10 half-channel widths upstream of the exit plane; uniform flow conditions are specified 20 half-channel widths downstream of the exit plane
K = k - - , (16) V ' V
where k is a scalar of order h [10]. Streamline upwind finite element methods have improved stability prop- erties relative to Galerkin 's techniques, but they can- not be more than first-order accurate [9]. They have recently been used in complete viscoelastic simula- tions (see, e.g., [11]).
3.2 Numerical results
Let us now compare the numerical properties of these three different techniques in the so-called planar stick-slip flow problem. The flow geometry and boundary conditions are depicted in Fig. 1. This prob-
10
8
6
4
2
0 ~ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . "?~l ° " " ° * " ° " " ° °
- - 2 I I I I I
-10 - 5 0 5 10 15 20
axial distance
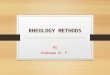
Fig. 2. Streamline integration predictions of the upper-con- vected Maxwell extra-stress along the streamline ~z = 0.432. The xx-, xy-, and yy-components of T v are shown in dot- ted, dashed, and solid lines, respectively, as a function of dimensionless axial distance y / H
lem is very challenging in view of the stress singularity at the exit point [12]. For the sake of illustration, we shall consider numerical results based on Newtonian kinematics; the selected constitutive equation is the upper-convected Maxwell model, namely,
A ( T v ; , ~ ) = I , a = O ,
B(Tv, Vv ) = 2 (Tv .Vv+ Vv T. T v ) - Tv + 2PvD , (17)
in Eqs. ( 5 - 6 ) and (10). Newtonian kinematics were computed by means of the finite element mesh shown in Fig. 1 and the classical velocity-pressure Galerkin method [1]. The same finite element mesh was used to compute the viscoelastic stresses with the Galerkin and Streamline Upwind methods. Two successive mesh refinement steps were carried out by dividing each element of the original mesh into four and 16 sub-elements, respectively. Streamline Integration results were obtained on the two particular stream- lines shown in Fig. 1. Computing viscoelastic stresses for the upper-convected Maxwell fluid based on given kinematics is a linear mathematical problem. Results can thus be obtained whatever the value of the Weissenberg number We. The numerical predictions discussed here are for We = 3, with We defined by
; tV We = , (18)
H
where Vis the average axial velocity and H i s the half- channel width.
The Streamline Integration results are shown in Fig. 2, where extra-stress values are made dimen- sionless with By V/H. These results have been obtain- ed with a dimensionless step size A s / H automatically varying between 5 x 1 0 -2 and 5 x 1 0 -6 along the streamline. The smallest values of the step size are used in the exit region where the mathematical pro- blem becomes quite stiff. It should be pointed out that the integration step sizes used here with

Keunings, Progress and challenges in computational rheology 561
30 20
20
1 0 -
- 1 0
- 2 0
- 3 0 -10
" I / I /
V I I I I I I
-5 0 5 10 15 20 axial distance
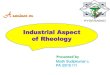
Fig. 3. Galerkin vs streamline integration predictions for the yy-component of upper-convected Maxwell extra-stress along the streamline g/= 0.432. Streamline integration prediction is shown as a solid line; Galerkin results using 1 x 1, 2× 2 and 4× 4 sub-divisions of the original mesh (Fig. 1) are shown as long-dashed, short-dashed, and dash- dot lines, respectively
15 1 , 1
lO- /
\ \
s \\\ 0 I I I I t I
-10 - 5 0 5 10 15 20 axial distance
Fig. 4. Streamline-upwind vs streamline integration predic- tions for the yy-component of the upper-convected Maxwell extra-stress along the streamline g/= 0.432. Streamline in- tegration prediction is shown as a solid line; Streamline-up- wind results using 1 × 1, 2 × 2, and 4 × 4 sub-divisions of the original mesh (Fig. 1) are shown in long-dashed, short-dash- ed, and dash-dot lines, respectively
Streamline Integration are orders of magnitude smaller than the characteristic dimension of the finite elements used in our finite element calculations. Careful numerical experiments with various ranges of step sizes and alternative streamline integration rules reveal that the results shown in Fig. 2 constitute highly stable and accurate predictions of the Maxwell extra-stress based on Newtonian kinematics. We can state safely that these results are fully-converged as far as discretization errors are concerned. In view of their accuracy, we shall use the Streamline Integration predictions as a basis for comparison.
For the same flow conditions, the Galerkin and Streamline Upwind finite element methods were used to predict the Maxwell extra-stress with 1 × 1, 2 × 2, and 4 × 4 sub-divisions of the finite element mesh shown in Fig. 1. Results are compared to the Streamline Integration predictions in Figs. 3 - 5, in terms of the yy-component of the extra-stress along the two selected streamlines. Significant differences are seen between Galerkin and Streamline Integration results. The discrepancy is largest near the singularity, but it is also noticeable over most of the computa- tional domain. Actually, Galerkin's results diverge
with increased mesh refinement. The intrinsic in- stability of Galerkin's method applied to purely- hyperbolic problems allows the propagation over a large part of the flow domain of spurious oscillations emanating from the singularity.
Results obtained with the Streamline Upwind finite element method are significantly superior to the Galerkin predictions along the streamline that is far- thest from the wall (Fig. 4). Convergence to the Streamline Integration results is observed with in- creased mesh refinement. In this particular flow prob- lem, a 4 x 4 sub-division of the mesh used for predict- ing the kinematics is required to obtain accurate ex- tra-stress values in that part of the flow domain; this is precisely the approach adopted in [11] for complete viscoelastic simulations. Inspection of Fig. 5 reveals, however, that the Streamline Upwind results are quite inaccurate along the streamline close to the wall; the inaccuracy persists over several channel widths downstream of the exit section. The numerical results obviously have not converged with mesh refinement there.
Additional insight into the behavior of the solution can be gained from inspection of Fig. 6. Here we

562 Rheologica Acta, Vol. 29, No. 6 (1990)
250
2 0 0
150
100
50
0 -
-50 -
\
\
\
\\
. /
- 1 0 0 i I I I 1 J
-10 -5 0 5 10 15 20 axial distance
Fig. 5. Streamline-upwind vs Streamline Integration predic- tions for the yy-component of the upper-convected Maxwell extra-stress along the streamline ~ = 0.056. Streamline in- tegration prediction is shown as a solid line; Streamline-up- wind results using 1 x 1, 2 x 2, and 4 x 4 sub-divisions of the original mesh (Fig. 1) are shown in long-dashed, short-dash- ed, and dash-dot lines, respectively
Tyy 2 0 0 0 -
1500
1 0 0 0 -
500
J 0 / I I I I
0 0.2 0.4 0.6 0 .8 1
x
Fig. 6. Streamline Integration predictions for the yy-com- ponent of the upper-convected Maxwell extra-stress at the cross-section located one half-channel width downstream of the exit plane
show the yy-component of the Maxwell extra-stress computed with the Streamline Integration method at the cross-section located one half-channel width downstream of the exit. The dimensionless abscissa x / H equals 0 at the plane of symmetry and 1 at the slip boundary. The results reveal the presence of a very steep stress boundary layer located at the slip boundary and transverse to the flow direction. The Galerkin method obviously cannot cope with such high stress gradients. It produces spurious oscillations that propagate far away from the slip boundary; mesh refinement only aggravates the problem. The Streamline Upwind method also does not behave well in the boundary layer, but the spurious oscillations tend to be confined near the slip boundary. Con- vergence with mesh refinement is actually observed in most of the cross-section [8].
The above results show how deli'cate it can be to compute viscoelastic stresses on the basis of given kinematics. The numerical difficulties find their origin in the hyperbolic nature of the constitutive model and in the large (or infinite) stress gradients localized in parts of the flow domain. Streamline In- tegration produces very accurate and stable stress predictions along individual streamlines, but it re- quires the use of tiny integration steps in flow regions of high gradients. On the other hand, the Galerkin and Streamline Upwind finite element methods prove unable to yield mesh-independent results; these con- ~vergence problems are found over the whole flow do- main with Galerkin's method, while they are confined within a region containing the boundary layer for the case of the Streamline Upwind technique. We expect these difficulties to occur in all viscoelastic flow prob- lems with localized stress gradients. It is now widely acknowledged that most viscoelastic flow of practical significance, though not all (see Sect. 5), belong to that class [1].
Let us now discuss the solution of the complete set of viscoelastic governing equations. Not surprisingly, we shall uncover additional numerical challenges which have only partially been met with currently available methods.
4. Solution of full set of governing equations
4.1 Coupled and decoupled methods
The analysis of the relevant literature reveals that currently available methods for solving the full set of governing Eqs. ( 1 - 5 ) can either be classified as coupled or decoupled techniques [1]. In the coupled approach, the discretized governing equations are

Keunings, Progress and challenges in computational rheology 563
solved simultaneously for the whole set of primary variables, usually by means of Newton's iterative scheme. In the decoupled approach, the computation of the viscoelastic extra-stress is performed separately from that of the flow kinematics. From known kinematics, one calculates the viscoelastic extra-stress by integrating the constitutive equations (as we did in the previous Section); the kinematics are then updated by solving the conservation equations, and the pro- cedure is iterated upon. The update scheme is usually of the Picard type, where the previously computed viscoelastic stress acts like a pseudo-body force in the momentum equation.
Coupled and decoupled methods enjoy very dif- ferent convergence properties as far as the iterative scheme is concerned. Let us discuss these differences in relation to the issue of obtaining numerical results at high values of the Weissenberg number.
4.2 The high Weissenberg number problem
Despite the evident progress over the last few years [1-2] , obtaining accurate numerical solutions (or worse, any solution at all) at high values of the Weissenberg number We remains a challenge. Most frustrating has been the almost universal failure of conventional iterative schemes to converge beyond some critical value of We. In order to understand the causes for the so-called High Weissenberg Number Problem (HWNP), it is appropriate to analyze first the discrete problem, namely the set of algebraic equations obtained after discretization of Eqs. (1 - 5).
Let us consider a particular flow problem, which we discretize by means of a specific numerical technique and a given grid (or mesh). Furthermore, let x(We) denote the family of numerical solutions parameter- ized by We and emanating from the Newtonian solu- tion x(0). Since the problem is non-linear, one can ex- pect a rich qualitative behavior of the numerical solu- tion family. Possible cases are illustrated in Fig. 7. With the exception of case A, they all involve ir- regular points in the solution family. As we discussed in detail in [1], these irregular points can induce loss of convergence of conventional iterative schemes.
Two important questions need to be raised at this point. Is it possible with a given iterative method to identify the presence o f irregular points in the numerical solution families, and are those irregular points intrinsic properties o f the continuous problem (Eqs. 1 - 5) or numerical artifacts due to improper discretization? It turns out that those questions can- not be addressed unambiguously with existing decoupled techniques. Indeed, Picard-type iterative schemes can diverge in the absence of irregular points, even if the initial guess is chosen arbitrarily close to a solution. As a result, it is impossible to decide whether convergence difficulties with decoupled tech- niques are due to the iterative scheme itself or to possible irregular points of the discrete solution families (or both). Furthermore, our own experience with decoupled methods [8] shows that it is quite dif- ficult to assess convergence of a decoupled method unambiguously. This is primarily due to the first- order convergence rate of a Picard scheme. In addi-
t -
O
'-1
o 03
A B
f i, i
0. We Wecrit
C
Wecrit
D
I
Wecri t
E
I
Wecrit
Fig. 7. Possible qualitative behavior of the numerical solution family x(We) emanating from the Newtonian solution x(0)

564 Rheologica Acta, Wol. 29, No. 6 (1990)
tion, most decoupled schemes use relaxation factors to prevent divergence; with such schemes, solution in- crements between consecutive iterations can be made arbitrarily small, leaving the analyst, in some cases, with the false feeling that the solution is converging although it is not. The need for relaxation comes from the very large sensitivity of the viscoelastic extra-stress to small changes in kinematics. In the stick-slip prob- lem discussed above, for example, a small change in the velocity field from one iteration to the next leads to large changes in extra-stress values within the boundary layer (Fig. 6). Actually, the use of a very ac- curate extra-stress integrator (like the Streamline In- tegration method) enhances this sensitivity, since the boundary layer is well captured, and thus decreases the ability of the iterative scheme to converge [8].
The situation is quite different with coupled methods. Newton's iterative scheme enjoys quadratic convergence; as a result, convergence is easy to assess (when it does occur). Furthermore, convergence is guaranteed if the initial guess is chosen sufficiently close to a solution and if the Jacobian matrix is non- singular there. Finally, irregular points can be tracked unambiguously on the basis of information contained in the Jacobian matrix. The answer to our first ques- tion is thus positive: it is possible to track irregular points (of the numerical solution families) unam- biguously with a coupled method. In order to address the second question, namely whether the irregular points are numerical artifacts or not, let us consider a specific example.
4.3 The H W N P and coupled methods: an example
Most coupled methods for differential viscoelastic models are based upon a mixed finite element discretization where the viscoelastic extra-stress, velocity, and pressure are approximated by means of a finite number of nodal values and shape functions:
T*~ ~ i v* Ig i , = ~ p 'zr i . = T v ¢ i , = ~ v i p* i = 1 i=1 i = l (•9)
Although many alternative formulations exist [1], we shall discuss here results obtained with a particular Galerkin formulation of the governing Eqs. ( 1 - 5). Substitution of Eq. (19) into Eqs. (1 - 5 ) and use of Galerkin's principle yield the following set of equa- tions for the nodal values:
((bi;A ( T*; )~ )" T* + A ~T* - 2PvD*I = O ' f i t
i = 1,2 . . . . . N 7 , (20)
( V q / i ; [ - p * I + 21ZN D* + T*])
\ Ot
i = 1,2 . . . . . Nv , (21)
(Tgi, V ' U * ) = 0 , i = 1,2 . . . . . Np . (22)
Integration by parts is used in (21), to yield the boundary integral term ((qJi; t)) involving the surface traction t. A major issue with mixed methods is the proper selection of approximating sub-spaces, i.e. of appropriate shape functions in Eq. (19). Mathemati- cal results that would guide this selection have been obtained recently in the Newtonian case [13]; the cor- responding viscoelastic theory remains to be devel- oped. The results described below are based on the mixed finite element interpolation developed in [14]. Although this numerical technique has since been sur- passed by more sophisticated mixed formulations (e.g., [11]), the simulation results obtained with it raise highly relevant issues which are still worthy of discussion.
In order to gain some insight into the causes for the HWNP, we chose in [15] a particular physical prob- lem, namely the steady-state flow of Maxwell and Giesekus fluids through an abrupt, planar 4:1 con- traction (Fig. 8). Fully-developed Poiseuille flow was specified at some distance upstream and downstream of the contraction plane, while no-slip boundary con- ditions were imposed at the wall. The kinematics ob- served with polymeric fluids in this flow geometry as extremely diverse [16]. As far as numerical analysis is concerned, the problem is quite challenging in view of the stress singularity at the re-entrant corner [12].
We used the Galerkin mixed method (Eqs. 20 - 22) and a sequence of finite element meshes which are in- creasingly refined near the re-entrant corner. Turning points, i.e., case D of Fig. 7, were found unam- biguously in the numerical solution families com- puted with both fluid models. The location of the
///////////////////////////
/////////////////~ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ ~
\\\\\\\\\\\\\\\\\\\\\\\\\\\" Fig. 8. Schematic of the flow through an abrupt contraction

Keunings, Progress and challenges in computational rheology 565
Table 1. Location of the turning point as a function of mesh refinement near the re-entrant corner [15]; corner element sizes are made dimensionless with the half-thickness of the downstream slit
Degrees Size of of corner freedom element
Location Wecrit of the turning point
Giesekus model Maxwell model
3 139 0.25 0.805 0.873 5059 0.20 1.05 0.565 3 046 0.05 4.545 0.556
11 172 0.02 0.408 0.588 40974 0.005 0.610 0.112
turning point in We-space is given in Table 1 as a function of mesh refinement. In this problem, it is natural to characterize the degree of mesh refinement by the size of the finite elements which share the re- entrant corner node. (It should be pointed out that the most refined mesh contains 40974 degree of freedom.) With the Giesekus fluid, the turning point is very sensitive to mesh refinement, and thus appears to be an artifact of numerical discretization. Interme- diate levels of mesh refinement largely delay the oc- currence of the turning point, but further refinement is not very helpful in that regard. It is worth noting that the solutions computed with the Giesekus model were oscillation-free even close to the turning point.
Inspection of Table 1 reveals that the picture is en- tirely different with the Maxwell model. The turning point seems to settle in a mesh-independent location of about 0.6. It would thus appear that a turning point of the exact solution family has been identified in the present flow problem. With the most refined mesh, however, the turning point occurs at a much reduced value of We. Furthermore, and also in con- trast to the results obtained with the Giesekus model, the solutions computed with the Maxwell fluid near the turning point are polluted by spurious spatial oscillations which emanate from the re-entrant cor- ner.
The above results show that intensive mesh refine- ment does not eliminate the numerical difficulties in the presence of a stress singularity, at least with the present mixed method. The nature of stress singulari- ties for common viscoelastic models remains largely unknown. As a result, it has not yet been possible to exploit the local form of the singularity in a specia- lized numerical procedure, as one does routinely in fracture mechanics, for example. We have shown [12] that the stress singularity can be computed explicitly for the second-order f luid in flows satisfying the con- ditions of the Giesekus-Tanner-Huilgol theorem. The
second-order fluid approximates the differential model (Eq. 5), in general, all simple fluids, in the limit of low-We flows endowed with smooth deformation histories. Creeping flow through a planar contraction and the planar stick-slip problem are two examples of flows for which the singularity can be computed. In these cases, the Newtonian extra-stress has a singular- ity of the type r -n, where r is the distance from the singular point and n > 0. We have n = 0.455 for flow in a sudden contraction, and n = 0.5 for the stick-slip problem. The corresponding stress singularity for the second-order fluid is like r -n+ Wer-Zn. This result establishes the singular character of the Newtonian limit: there always exists some neighborhood r,~ We l/2n of the boundary singularity where visco- elastic and Newtonian stress fields differ by an ar- bitrarily large amount. We also see that the dominant term of the second-order fluid singularity is the square of the Newtonian singularity, which implies more significant numerical problems relative to the Newtonian case.
The second-order fluid is not a valid asymptotic theory of real viscoelastic fluids as one approaches the re-entrant corner, since the deformation history is not smooth there. Our numerical simulations indicate, however, that the above results have some validity with more complex constitutive equations [12]. Figure 9 shows stress values computed with the upper-con-
10°
101
1 ' a ' ' ' , " 1 ' ' ' ' ' ' " 1
10 2 = - . 1
b)
1 0 ( I I I I I I I I I L I I ~ I I l l / 0 10-2 -1
Distance from corner
Fig. 9. Normalized stress difference in the vicinity of the re- entrant corner (planar contraction); finite element results obtained with the upper-convected Maxwell fluid at We = 0.03 (a) and 0.06 (b) [12]

566 Rheologica Acta, Vol. 29, No. 6 (1990)
vected Maxwell fluid in the vicinity of the re-entrant corner, using the most refined mesh of Table 1. The Weissenberg number is within a range where one would expect the second-order fluid to provide a rea- sonable approximation to the Maxwell fluid suffi- ciently far away from the corner. We find, indeed, that the stress for the Maxwell fluid follows the asymptotic behavior predicted with the second-order fluid, except in the very small element containing the re-entrant corner. It thus appear that the r -°'91 dependence of the extra-stress holds for the Maxwell fluid, at least at very low We and in a region close to, but excluding the re-entrant corner. This observation can be used to interpret the results of Table 1. Meshes that are sufficiently refined in the vicinity of the singularity will render computations with the Maxwell fluid extremely difficult, much more difficult than with a Newtonian fluid. Above some degree of refine- ment, approximation errors will grow to the extent that an artificial turning point is produced, whose location in We-space goes to zero with increased resolution. (This difficulty is much delayed for the Giesekus model, which does have an non-vanishing Newtonian component TN; viscoelastic fluids with a Newtonian component are believed to have singulari- ties of the Newtonian type [1].)
Actually, we can go one step further and assume that a turning point exists in the exact solution family for the Maxwell fluid, located at about 0.6. In view of the above discussion, it is indeed plausible that the stress singularity overwhelms the numerical results obtained with the most refined mesh to the extent that it induces an artificial turning point before the true turning point could be reached. We have performed two further numerical experiments that give some ground to this hypothesis. In [12], we repeated the computations using the most refined mesh, but with a single change in the problem definition: the relaxa- tion time was set to zero in the minute elements con- taining the re-entrant corner, thus maintaining the strength of the singularity at its Newtonian value. In- terestingly enough, the turning point moved from 0.1 in the original problem formulation (Table 1) to about 0.6, i.e., close to the hypothesized turning point of the exact solution family. In another experiment, the problem was regularized by rounding the re-en- trant corner [17]. The computed turning points were found to be only weakly dependent on extensive mesh refinement, indicating the existence of a true turning point in this modified problem at about 0.8. Unfor- tunately, in both experiments, the quality of the numerical solutions showed some degradation in the vicinity of the turning point. It thus remains impossi-
ble at this stage to conclusively prove the existence of a true turning point in this flow problem.
The above results regarding the nature of viscoelas- tic stress singularities raise important physical issues that are independent of numerical ones. In the case of the abrupt contraction, the dominant term of the sec- ond-order fluid singularity is like r -°'91 and is thus integrable (namely, it leads to finite forces). The sin- gularity is non-integrable in the stick-slip problem, however, since the dominant term is like r-1. Non- integrable stresses are physically inadmissible. In- deed, stresses greater than some value corresponding to the strength of the continuum (typically of order 1 GPa) are inadmissible. We have shown [12] that un- physically large stresses can be reached in a second- order fluid over length scales where the continuum approach applies. In view of the numerical results il- lustrated in Fig. 9, the unphysical stresses computed for the second-order fluid are plausible for the Max- well fluid as well. It thus appears likely that some of the current mathematical descriptions of viscoelastic flows near boundary singularities not only create sig- nificant numerical problems, but also do not make much physical sense. There are at least two ways within the context of a continuum theory to correct this deficiency: the use of a constitutive model in which structure breakdown at high stresses induces a severe decrease of the viscoelastic stress component near the singularity, and the relaxation of the conven- tional no-slip boundary condition.
5. Simulation of smooth problems
5.1 Preliminaries
As mentioned previously, viscoelastic simulations have long been limited to low values of the Weissenberg number. Therefore, the provocative flow phenomena observed with polymeric fluids could not possibly be predicted [1]. This frustrating state of affairs has much improved over the last few years, in the sense that several numerical solutions are now available over a range of Weissenberg numbers that covers the experiments. Those results have been reviewed in [1-2] . We wish to emphasize, however, that the actual numerical accuracy of available high- We results remains, for the most part, to be demon- strated. Except in isolated cases listed in [1], the con- siderable cost associated with viscoelastic simulations has prevented most researchers from increasing the resolution of their grids to the point where con- vergence to an exact solution could be demonstrated unambiguously. (Of course, this does not imply that

Keunings, Progress and challenges in computational rheology 567
L
)12
Fig. 10. Schematic of co-flow through an abrupt expansion
b Fig. 11. Observed [19] and predicted [18] streamlines in co- flow through an abrupt expansion. The dashed line denotes the predicted interface
the other high-We results published in the literature are necessarily inaccurate.)
It has become clear in recent years that current mathematical formulations of viscoelastic flows often lead to very complex velocity and stress fields as the Weissenberg number increases. Boundary or internal layers have been predicted even in smooth flow
geometries (e.g., flow past a sphere, flow between ec- centric cylinders). As discussed above, these features remain very difficult to capture accurately in a numerical solution. It is not clear at this point in time whether or not such high solution gradients are physically realistic. For example, it is not obvious to us that a real fluid should suffer in the stick-slip flow stresses downstream of the exit that are three orders of magnitude larger than those generated before the exit (Fig. 6). This issue is, of course, related to the selection of proper constitutive models and boundary conditions.
Smooth viscoelastic flow problems of practical significance do exist, however, although they do not appear to be numerous, with currently available models. Successful simulations of such flows have recently been conducted that predict important visco- elastic effects and show good agreement with experi- mental data [1]. We close our brief discussion of the field of viscoelastic computation with the analysis of two flow problems endowed with smooth but interest- ing solutions.
5.2 Co-Flow of immiscible fluids
Co-flow of immiscible viscoelastic fluids is typical of polymer processing applications like co-extrusion and co-injection molding. Let us consider for example the steady-state co-flow of two different fluids through a sudden axisymmetric expansion (Fig. 10). One of the main issues here is to determine the loca- tion of the interface separating the two fluid phases. The problem is akin to a free-surface flow, since the interface location constitutes a_q additional unknown field. At first sight, the flow depicted in Fig. 10 is even more difficult to compute than the single-fluid entry flow discussed in the previous Section. We learned, though, that most of the numerical problems come from the stress singularity at the re-entrant corner. It

568 Rheologica Acta, Vol. 29, No. 6 (1990)
0.3
~" 0.2 E 0
~, 0.1 0
0
~ 0.0
Axial Position (Z/D) = .12
-0.1 • i . i - i • i i
0.0 0.2 0.4 0.6 0.8 1.0
Radial Distance (cm)
.2
Fig. 12. Axial and radial velocity components in co-flow through an abrupt expansion; experimental data points [19] and numerical predictions [18]
can thus be expected that the two-fluid problem will indeed be numerically more tractable if the fluid phase in contact with the wall is Newtonian. We recently performed such calculations [18] by means of an extension of the conventional mixed method (Eqs. 20-22). The inner fluid was described by the Oldroyd-B model, while the outer fluid in contact with the wall was taken as Newtonian. Figure 11 com- pares the predicted streamlines to those observed in [19] with dilute polymeric solutions. In these calcula- tions, the inner fluid is about 10 times more viscous than the outer fluid. A large vortex is predicted in the Newtonian phase, which is mostly due to the viscosity ratio between the two fluids. Figure 12 shows a com- parison between computed and obseryed velocity components. Agreement between predictions and ex- perimental data is quite good. There was no difficulty to obtain numerical results at high Weissenberg numbers in this problem. Elastic effects were in- vestigated by increasing the inner fluid elastic con- stant from the experimental value of 1.6 s up to 15 s, all other parameters being kept constant. As shown in Fig. 13, the predicted interface reaches its fully-
-'-,,, , ~ p = 15 s
Fig. 13. Predicted influence of inner fluid elasticity on interface location and recirculation zone in co-flow through an abrupt expansion [18]
developed location more rapidly as elasticity of the in- ner fluid increases. This trend is accompanied by a significant decrease in vortex strength and size in the Newtonian fluid phase. The influence of elasticity is not monotonic, however [18]. The success of these high-We flow simulations is undoubtedly due to the presence of a Newtonian fluid phase adjacent to the expansion wall which renders the corner stress singularity both physically more reasonable and numerically more tractable than in single viscoelastic fluid flow calculations.
5.3 Breakup of viscoelastic jets
A liquid jet emanating from a vibrating nozzle may break up into droplets if the frequency of the vibra- tion is sufficiently small (Fig. 14). This instability is driven by surface tension. The breakup of liquid jets is important in many applications, including ink-jet printing, atomization processes, and elongational rheometry. Polymer solutions are known to take longer to break up than Newtonian jets of com- parable shear viscosity; they may not even form droplets at all. The Newtonian case can be adequately predicted by means of linear stability theory [20]. In this context, the actual spatial stability problem is for- mulated as a transient process in a frame of reference moving with the jet. The growth of infinitesimal periodic disturbances applied to the radius of a sta- tionary liquid cylinder can then by predicted analyti- cally, assuming that the disturbance wavelength re- mains constant. Linear stability analysis predicts breakup lengths of Newtonian jets rather well, but it fails to describe the stabilizing effect of elastic forces in polymeric liquids [21]. Two successful non-linear analyses of viscoelastic jet breakup have been report- ed in [22- 23]. One uses an approximate one-dimen- sional model of the jet dynamics [22], while the other
Water Jet
--~ ~-1 mm
Polymer Jet
Fig. 14. Schematic of the growth of surface disturbances in Newtonian and viscoelastic jets

Keunings, Progress and challenges in computational rheology 569
r ~ - - I h i z - ~ O i -
I I , O. L z
swe l l n e c k
Fig. 15. Computational domain for the jet breakup problem
solves the two-dimensional case by means of an exten- sion of the mixed method (Eqs. 20 - 22) to treat tran- sient free surface flows [23]. These complementary studies retain the framework of linear theory, but are not limited to infinitesimal perturbations of the jet radius. Let us briefly review our finite element results [23].
In the present application, the flow domain is axi- symmetric and extends over half the wavelength of the disturbance (Fig. 15). The jet radius is denoted by the unknown function h. Symmetry conditions are
J e ~ 6 ~ I [ 2.0 =
0.5 Newtonion
0 t I i i 9
2.0
r 1.5
1,0 ~
0.5
2.0
1.5
1.0
0.5
I I l I 1 2
I I I I
I i I [ 18
~ ~ ~ ..~.... ~ ,
2 1
I I t I 3O
I I I I
0 0.2 0 .4 0.6 0.8 1.0 0 0.2 0.4 0.6 0.8 1.0
Fig. 16. Finite element predictions of free surface shape for inertialess jets of Newtonian and Oldroyd-B fluids [23]; r, 0, and ( are dimensionless jet radii; times and axial distances, respectively
imposed at z = 0 and L, as well as on the axis of sym- metry. A stress balance that includes capillary forces holds at the free surface. Figure 16 shows free surface shapes predicted for inertialess jets of Newtonian and Oldroyd-B fluids. The disturbance initially grows much more rapidly in the viscoelastic filament, in ac- cordance with linear theory. The shape of the visco- elastic jet then stabilizes rather abruptly into the droplet-connecting ligament configuration seen in the experiments; the disturbance continues to grow on the Newtonian jet, leading eventually to breakup. These finite element results are in quantitative agreement with the one-dimensional calculations given in [22]. The latter can thus be used in confidence for much less expensive parametric studies (the viscoelastic simulation of Fig. 16 consumed about 1 hour of CPU time on a single-processor CRAY X-MP). Figure 17 shows a comparison between the one-dimensional non-linear analysis [22] and experimental data for a dilute polymeric solution; the agreement is excellent. Inspection of the computed stress field [23] reveals that the flow in the nascent ligament is nearly exten- sional; the retardation effect of elasticity on the breakup process results from the high values of the elongational viscosity predicted with the Oldroyd-B model. The above simulation demonstrates that the simple Oldroyd-B model can have excellent predictive ability in flows of dilute polymeric solutions, as long as the deformation rates involved are sufficiently moderate.
m
I
I00 t
f. 4" ,o-,
-74 ° I I • Ne ,
/ A Swell /
fO -z /I I I I 0 2 0 0 0 4 0 0 0
8 Fig. 17. Evolution of the jet radius disturbance as a function of time; experimental data points for a dilute polymeric solution and predictions based on the Oldroyd-B model [22]. The dashed line is the prediction of linear stability theory [21]

570 Rheologica Acta, Vol. 29, No. 6 (1990)
6. Conclusions
We have attempted in this paper to survey what we believe are some of the main issues in the field of viscoelastic flow simulations. The strong interplay be- tween modeling, mathematical , and numerical con- siderations makes this field particularly fascinating, but also quite difficult. Much remains to be discov- ered towards the proper mathematical description of the relevant physics, both in terms of bulk rheology and fluid/solid interactions. Recent theoretical and numerical work has identified a number of challenges for the numerical analyst. Boundary layers, stress singularities, bifurcations, turning points, and hyper- bolic phenomena are potential features of current mathematical formulations of viscoelastic flows. Some of these features may reflect the actual physics of polymeric liquids, while others may only signal the inadequacy of the mathematical model. Despite the steady progress made over the last few years towards the development of improved numerical techniques, further interdisciplinary research is needed to allow the numerical simulation of viscoelastic flows to rea- lize its full potential.
References
1. Keunings R (1989) In: Tucker CL III (ed) Computer Modeling for Polymer Processing. Hanser Verlag, Munich, pp 403- 469
2. Crochet MJ (1989) Rubber Reviews. Amer Chem Soc 62:426- 455
3. Tanner RI (1985) Engineering Rheology. Clarendon Press, Oxford
4. Bird RB, Armstrong RC, Hassager O (1987) Dynamics of Polymeric Liquids, vol 1, Fluid Mechanics. Wiley, New York
5. Joseph DD, Renardy M, Saut JC (1985) Arch Rational Mech Anal 87:213-251
6. Joseph DD, Matta JE, Chen K (1987) J Non-Newto- nian Fluid Mech 24:31-65
7. Renardy M (1986) Mathematics Research Center Technical Summary Report No 2916. University of Wisconsin, Madison, USA
8. Rosenberg JR, Keunings R (1990) submitted to J Non- Newtonian Fluid Mech
9. Johnson C, Navert U, Pitkaranta J (1984) Comp Meth Appl Mech Engng 45:285-312
10. Brooks AN, Hughes TJR (1982) Comp Meth Appl Mech Engng 32:199 - 259
11. Marchal JM, Crochet MJ (1987) J Non-Newtonian Fluid Mech 26:77- 114
12. Lipscomb GG, Keunings R, Denn MM (1987) J Non- Newtonian Fluid Mech 24:85- 96
13. Fortin M, Pierre R (1989) Comp Meth Appl Mech Engng 73:341 - 350
14. Keunings R, Crochet MJ (1984) J Non-Newtonian Fluid Mech 14:279-299
15. Keunings R (1986) J Non-Newtonian Fluid Mech 20:209 - 226
16. Boger DV (1987) Ann Rev Fluid Mech 19:157- 182 17. Rosenberg JR, Keunings R (1988) J Non-Newtonian
Fluid Mech 29:295- 302 18. Musarra S, Keunings R (1989) J Non-Newtonian Fluid
Mech 32:253- 268 19. van de Griend R, Denn MM (1989) J Non-Newtonian
Fluid Mech 32:229- 252 20. Lord Rayleigh JSW (1945) The Theory of Sound, vol 2.
Dover, New York 21. Middleman S (1965) Chem Engn Sci 20:1037-1040 22. Bousfield DW, Keunings R, Marrucci G, Denn MM
(1986) J Non-Newtonian Fluid Mech 21:79-97 23. Keunings R (1986) J Computat Phys 62:199-220
(Received October 10, 1990)
Author's address:
Prof. R. Keunings Unit6 de M6canique Appliqu6e Universit6 Catholique de Louvain Place du Levant, 2 1348 Louvain-la-Neuve, Belgium