Embed Size (px)
Citation preview

Prognosis of Gear Health Using Gaussian Process
Model
Department of Adaptive systems, Institute of Information Theory and Automation, May 2011, Prague

Motivation
An estimated 95% of installed drives belong to older generation - no embedded diagnostics
functionality- poorly or not monitored
These machines will still be in operation for some time!
Goal: to design a low cost, intelligent condition monitoring module

Outline
Problem description Experimental setup Gaussian Process models Time series modelling and prediction Conclusions

Problem description
Gear health prognosis using feature values from vibration sensors
Model the time series using discrete-time stochastic model
Time series prediction using the identified model
Prediction of first passage time (FPT)

Experimental setup
Experimental test bed with motor-generator pair and single stage gearbox

Experimental setup
Vibration sensors
Signal acquisition

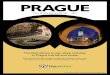
Experimental setup
Experiment description• 65 hours• constant torque (82.5Nm)• constant speed (990rpm)• accelerated damage mechanism
(decreased surface area)

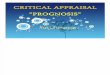
Mechanical damage

Feature extraction
For each sensor, a time series of feature value evolution is obtained, only y8 used

Outline
Problem description Experimental setup Gaussian Process models Time series modelling and prediction Conclusions

Probabilistic (Bayes) nonparametric model
GP model
Prediction of the output based on similarity test input – training inputsOutput: normal distribution
•Predicted mean •Prediction variance
-2 +2

Static illustrative example
Static example: 9 learning points: Prediction
Rare data density increased variance (higher uncertainty).
-1.5 -1 -0.5 0 0.5 1 1.5 2-4
-2
0
2
4
6
8
xy
Nonlinear function to be modelled from learning points
y=f(x)
Learning points
-1.5 -1 -0.5 0 0.5 1 1.5 2-6
-4
-2
0
2
4
6
8
10
x
y
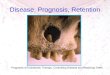
Nonlinear fuction and GP model
-1.5 -1 -0.5 0 0.5 1 1.5 20
2
4
6
x
e
Prediction error and double standard deviation of prediction
2|e|
Learning points
2f(x)

GP model attributes (vs. e.g. ANN) Smaller number of parameters Measure of confidence in prediction, depending on data Data smoothing Incorporation of prior knowledge * Easy to use (engineering practice)
Computational cost increases with amount of data
Recent method, still in development Nonparametrical model
* (also possible in some other models)

Outline
Problem description Experimental setup Gaussian Process models Time series modelling and prediction Conclusions

Prediction of first passage time

The modelling of feature evolution as time series and its prediction

Prediction of the time when harmonic component feature reaches critical value

Conclusions Application of GP models for:
• modelling of time-series describing gear wearing
• prediction of the critical value of harmonic component feature
Two models useful:• Matérn + polynomial + constant
covariance function• Neural-network covariance function
Useful information 15 to 20 hours ahead – soon enough for maintenance