Embed Size (px)
Citation preview

Princípios dos Momentos -Teorema de Varignon- (1654-1722)
Prof. Ettore Baldini-Neto

O momento de uma força em relação a um dado ponto é igual à soma dos momentos das componentes da força em relação ao mesmo ponto.
128 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
Important Points
● The moment of a force creates the tendency of a body to turnabout an axis passing through a specific point O.
● Using the right-hand rule, the sense of rotation is indicated by thecurl of the fingers, and the thumb is directed along the momentaxis, or line of action of the moment.
● The magnitude of the moment is determined from where d is called the moment arm, which represents theperpendicular or shortest distance from point O to the line ofaction of the force.
● In three dimensions the vector cross product is used to determinethe moment, i.e., Remember that r is directed frompoint O to any point on the line of action of F.
● The principle of moments states that the moment of a forceabout a point is equal to the sum of the moments of the force’scomponents about the point. This is a very convenient method touse in two dimensions.
MO = r * F.
MO = Fd,
F2
O
r
F1F
Fig 4–16
MO
Fx
FFy
O
d
x
y
Fig. 4–17
FFyFy
FxFx
F
d
O
The moment of the applied force F aboutpoint O is easy to determine if we use theprinciple of moments. It is simply
.MO = Fxd
4.4 Principle of Moments
A concept often used in mechanics is the principle of moments, which issometimes referred to as Varignon’s theorem since it was originallydeveloped by the French mathematician Varignon (1654–1722). It statesthat the moment of a force about a point is equal to the sum of the momentsof the components of the force about the point.This theorem can be proveneasily using the vector cross product since the cross product obeys thedistributive law. For example, consider the moments of the force andtwo of its components about point O. Fig. 4–16. Since we have
For two-dimensional problems, Fig. 4–17, we can use the principle ofmoments by resolving the force into its rectangular components andthen determine the moment using a scalar analysis. Thus,
This method is generally easier than finding the same moment using.MO = Fd
MO = Fxy - Fyx
MO = r * F = r * 1F1 + F22 = r * F1 + r * F2
F = F1 + F2
F
~M0 = ~r ⇥ ~F = ~r ⇥ (~F1 + ~F2)
= ~r ⇥ ~F1 + ~r ⇥ ~F2
Princípios dos Momentos -Teorema de Varignon-

Princípios dos Momentos Problemas bidimensionais
128 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
Important Points
● The moment of a force creates the tendency of a body to turnabout an axis passing through a specific point O.
● Using the right-hand rule, the sense of rotation is indicated by thecurl of the fingers, and the thumb is directed along the momentaxis, or line of action of the moment.
● The magnitude of the moment is determined from where d is called the moment arm, which represents theperpendicular or shortest distance from point O to the line ofaction of the force.
● In three dimensions the vector cross product is used to determinethe moment, i.e., Remember that r is directed frompoint O to any point on the line of action of F.
● The principle of moments states that the moment of a forceabout a point is equal to the sum of the moments of the force’scomponents about the point. This is a very convenient method touse in two dimensions.
MO = r * F.
MO = Fd,
F2
O
r
F1F
Fig 4–16
MO
Fx
FFy
O
d
x
y
Fig. 4–17
FFyFy
FxFx
F
d
O
The moment of the applied force F aboutpoint O is easy to determine if we use theprinciple of moments. It is simply
.MO = Fxd
4.4 Principle of Moments
A concept often used in mechanics is the principle of moments, which issometimes referred to as Varignon’s theorem since it was originallydeveloped by the French mathematician Varignon (1654–1722). It statesthat the moment of a force about a point is equal to the sum of the momentsof the components of the force about the point.This theorem can be proveneasily using the vector cross product since the cross product obeys thedistributive law. For example, consider the moments of the force andtwo of its components about point O. Fig. 4–16. Since we have
For two-dimensional problems, Fig. 4–17, we can use the principle ofmoments by resolving the force into its rectangular components andthen determine the moment using a scalar analysis. Thus,
This method is generally easier than finding the same moment using.MO = Fd
MO = Fxy - Fyx
MO = r * F = r * 1F1 + F22 = r * F1 + r * F2
F = F1 + F2
F
Neste caso a decomposição da força resultante em suas componentes resolve o problema.
M0 = F
x
y � F
y
x

Resumo até aqui...
• O momento de uma força cria a tendência de um corpo girar ao redor de um eixo que passa por um ponto específico O.
• A regra da mão direita diz que o sentido de rotação segue a curva dos dedos e o polegar fornece a direção do momento da força (torque).
• O módulo do momento da força (torque) é M0=F.d onde d é chamado de braço do momento e representa a distância perpendicular do ponto O até a linha de ação da força.
• Em 3D, o torque é dado por M0= r x F, e r está direcionado de O até qualquer ponto sobre a linha de ação de F.

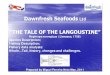
Exemplo 1: Determine o momento da força em relação ao ponto O da figura.
4.4 PRINCIPLE OF MOMENTS 129
4
EXAMPLE 4.5
Determine the moment of the force in Fig. 4–18a about point O.
Fig. 4–18
x
y
(c)
45!
30!
30!3 m
O
Fx " (5 kN) sin 75!
Fy " (5 kN) sin 75!
SOLUTION IThe moment arm d in Fig. 4–18a can be found from trigonometry.
Thus,
b Ans.
Since the force tends to rotate or orbit clockwise about point O, themoment is directed into the page.
SOLUTION IIThe x and y components of the force are indicated in Fig. 4–18b.Considering counterclockwise moments as positive, and applying theprinciple of moments, we have
MO = Fd = (5kN)(2.898 m2 = 14.5 kN # m
d = (3 m) sin 75° = 2.898 m
a
b Ans.= -14.5 kN # m = 14.5 kN # m= -15 cos 45° kN213 sin 30° m2 - 15 sin 45° kN213 cos 30° m2+ MO = - Fxdy - Fydx
SOLUTION IIIThe x and y axes can be set parallel and perpendicular to the rod’s axisas shown in Fig. 4-18c. Here produces no moment about point Osince its line of action passes through this point. Therefore,
a
b Ans.= -14.5 kN # m = 14.5 kN # m= -(5 sin 75° kN)(3 m)
+ MO = -Fy dx
Fx
30!
(a)
45!
F " 5 kN3 m
O
d75!
y
x
(b)
30!
45!
O
dy " 3 sin 30! m
dx " 3 cos 30! mFx " (5 kN) cos 45!
Fy " (5 kN) sin 45!
4.4 PRINCIPLE OF MOMENTS 129
4
EXAMPLE 4.5
Determine the moment of the force in Fig. 4–18a about point O.
Fig. 4–18
x
y
(c)
45!
30!
30!3 m
O
Fx " (5 kN) sin 75!
Fy " (5 kN) sin 75!
SOLUTION IThe moment arm d in Fig. 4–18a can be found from trigonometry.
Thus,
b Ans.
Since the force tends to rotate or orbit clockwise about point O, themoment is directed into the page.
SOLUTION IIThe x and y components of the force are indicated in Fig. 4–18b.Considering counterclockwise moments as positive, and applying theprinciple of moments, we have
MO = Fd = (5kN)(2.898 m2 = 14.5 kN # m
d = (3 m) sin 75° = 2.898 m
a
b Ans.= -14.5 kN # m = 14.5 kN # m= -15 cos 45° kN213 sin 30° m2 - 15 sin 45° kN213 cos 30° m2+ MO = - Fxdy - Fydx
SOLUTION IIIThe x and y axes can be set parallel and perpendicular to the rod’s axisas shown in Fig. 4-18c. Here produces no moment about point Osince its line of action passes through this point. Therefore,
a
b Ans.= -14.5 kN # m = 14.5 kN # m= -(5 sin 75° kN)(3 m)
+ MO = -Fy dx
Fx
30!
(a)
45!
F " 5 kN3 m
O
d75!
y
x
(b)
30!
45!
O
dy " 3 sin 30! m
dx " 3 cos 30! mFx " (5 kN) cos 45!
Fy " (5 kN) sin 45!

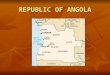
Exemplo 2: A força F age na extremidade da cantoneira mostrada na figura abaixo. Determine o momento da força em relação ao ponto O.
130 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
EXAMPLE 4.6
Force F acts at the end of the angle bracket shown in Fig. 4–19a.Determine the moment of the force about point O.
SOLUTION I (SCALAR ANALYSIS)The force is resolved into its x and y components as shown inFig. 4–19b, then
a
b
or
Ans.
SOLUTION II (VECTOR ANALYSIS)Using a Cartesian vector approach, the force and position vectorsshown in Fig. 4–19c are
The moment is therefore
Ans.
NOTE: It is seen that the scalar analysis (Solution I) provides amore convenient method for analysis than Solution II since thedirection of the moment and the moment arm for each componentforce are easy to establish. Hence, this method is generallyrecommended for solving problems displayed in two dimensions,whereas a Cartesian vector analysis is generally recommended onlyfor solving three-dimensional problems.
= 5-98.6k6 N # m= 0i - 0j + [0.41-346.42 - 1-0.221200.02]k
MO = r * F = 3 i j k0.4 -0.2 0
200.0 -346.4 0
3= 5200.0i - 346.4j6 NF = 5400 sin 30°i - 400 cos 30°j6 Nr = 50.4i - 0.2j6 m
MO = 5-98.6k6 N # m
= -98.6 N # m = 98.6 N # m+MO = 400 sin 30° N10.2 m2 - 400 cos 30° N10.4 m2
0.4 m
0.2 m
30!
O
F = 400 N(a)
Fig. 4–19
0.4 m
0.2 m
(b)
x
400 cos 30! N
400 sin 30! N
O
y
y
x
0.4 m
0.2 m
30!
O
F(c)
r
130 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
EXAMPLE 4.6
Force F acts at the end of the angle bracket shown in Fig. 4–19a.Determine the moment of the force about point O.
SOLUTION I (SCALAR ANALYSIS)The force is resolved into its x and y components as shown inFig. 4–19b, then
a
b
or
Ans.
SOLUTION II (VECTOR ANALYSIS)Using a Cartesian vector approach, the force and position vectorsshown in Fig. 4–19c are
The moment is therefore
Ans.
NOTE: It is seen that the scalar analysis (Solution I) provides amore convenient method for analysis than Solution II since thedirection of the moment and the moment arm for each componentforce are easy to establish. Hence, this method is generallyrecommended for solving problems displayed in two dimensions,whereas a Cartesian vector analysis is generally recommended onlyfor solving three-dimensional problems.
= 5-98.6k6 N # m= 0i - 0j + [0.41-346.42 - 1-0.221200.02]k
MO = r * F = 3 i j k0.4 -0.2 0
200.0 -346.4 0
3= 5200.0i - 346.4j6 NF = 5400 sin 30°i - 400 cos 30°j6 Nr = 50.4i - 0.2j6 m
MO = 5-98.6k6 N # m
= -98.6 N # m = 98.6 N # m+MO = 400 sin 30° N10.2 m2 - 400 cos 30° N10.4 m2
0.4 m
0.2 m
30!
O
F = 400 N(a)
Fig. 4–19
0.4 m
0.2 m
(b)
x
400 cos 30! N
400 sin 30! N
O
y
y
x
0.4 m
0.2 m
30!
O
F(c)
r

Momento de uma força em relação a um eixo dado.
Algumas vezes, o torque produzido por uma força em relação a um dado eixo precisa ser calculado4.5 MOMENT OF A FORCE ABOUT A SPECIFIED AXIS 139
4.5 Moment of a Force about a Specified Axis
Sometimes, the moment produced by a force about a specified axis mustbe determined. For example, suppose the lug nut at O on the car tire inFig. 4–20a needs to be loosened. The force applied to the wrench willcreate a tendency for the wrench and the nut to rotate about the momentaxis passing through O; however, the nut can only rotate about the y axis.Therefore, to determine the turning effect, only the y component of themoment is needed, and the total moment produced is not important. Todetermine this component, we can use either a scalar or vector analysis.
Scalar Analysis. To use a scalar analysis in the case of the lug nut inFig. 4–20a, the moment arm perpendicular distance from the axis to the lineof action of the force is Thus, the moment of F about the ydy = d cos u.
F
A B
F
x y
d
(a)
z
O
dy
MO
My
Moment Axis
u
Fig. 4–204
If large enough, the cable force F on the boomof this crane can cause the crane to toppleover. To investigate this, the moment of theforce must be calculated about an axis passingthrough the base of the legs at A and B.
axis is According to the right-hand rule, isdirected along the positive y axis as shown in the figure. In general, for anyaxis a, the moment is
(4–10)Ma = Fda
MyMy = F dy = F(d cos u).
A força aplicada na chave cria a tendência de a chave e a porca girarem em torno do eixo do momento que passa pelo ponto O; mas a porca só pode girar em torno de y. Logo, somente esta componente do momento interessa para o cálculo.
Para resolver este problema podemos utilizar a análise escalar ou a análise vetorial.

Análise EscalarNo caso específico do problema anterior, o braço do momento perpendicular à linha de ação da força é
4.5 MOMENT OF A FORCE ABOUT A SPECIFIED AXIS 139
4.5 Moment of a Force about a Specified Axis
Sometimes, the moment produced by a force about a specified axis mustbe determined. For example, suppose the lug nut at O on the car tire inFig. 4–20a needs to be loosened. The force applied to the wrench willcreate a tendency for the wrench and the nut to rotate about the momentaxis passing through O; however, the nut can only rotate about the y axis.Therefore, to determine the turning effect, only the y component of themoment is needed, and the total moment produced is not important. Todetermine this component, we can use either a scalar or vector analysis.
Scalar Analysis. To use a scalar analysis in the case of the lug nut inFig. 4–20a, the moment arm perpendicular distance from the axis to the lineof action of the force is Thus, the moment of F about the ydy = d cos u.
F
A B
F
x y
d
(a)
z
O
dy
MO
My
Moment Axis
u
Fig. 4–204
If large enough, the cable force F on the boomof this crane can cause the crane to toppleover. To investigate this, the moment of theforce must be calculated about an axis passingthrough the base of the legs at A and B.
axis is According to the right-hand rule, isdirected along the positive y axis as shown in the figure. In general, for anyaxis a, the moment is
(4–10)Ma = Fda
MyMy = F dy = F(d cos u).
dy = d.cos✓
Em geral, para qualquer eixo a podemos escrever:
Ma = Fda
My = Fdy = F.d.cos�

Análise Vetorial140 CHAPTER 4 FORCE SYSTEM RESULTANTS
Vector Analysis. To find the moment of force F in Fig. 4–20b aboutthe y axis using a vector analysis, we must first determine the moment ofthe force about any point O on the y axis by applying Eq. 4–7,
. The component along the y axis is the projection ofonto the y axis. It can be found using the dot product discussed inChapter 2, so that where j is the unit vectorfor the y axis.
We can generalize this approach by letting be the unit vector thatspecifies the direction of the axis shown in Fig. 4–21. Then the momentof F about the axis is . This combination is referred toas the scalar triple product. If the vectors are written in Cartesian form,we have
This result can also be written in the form of a determinant, making iteasier to memorize.*
(4–11)
whererepresent the x, y, z components of the unitvector defining the direction of the axis
represent the x, y, z components of theposition vector extended from any point O onthe axis to any point A on the line of actionof the forcerepresent the x, y, z components of the forcevector.
When is evaluated from Eq. 4–11, it will yield a positive or negativescalar. The sign of this scalar indicates the sense of direction of alongthe axis. If it is positive, then will have the same sense as whereasif it is negative, then will act opposite to
Once is determined, we can then express as a Cartesian vector,namely,
(4–12)
The examples which follow illustrate numerical applications of theabove concepts.
Ma = Maua
MaMa
ua.Ma
ua,MaaMa
Ma
FzFy,Fx,
a
rzry,rx,
auax
, uay, uaz
Ma = ua# 1r * F2 = 3 uax
uayuaz
rx ry rz
Fx Fy Fz
3= uax
(ryFz - rzFy) - uay(rxFz - rzFx) + uaz
(rxFy - ryFx)
Ma = [uaxi + uay
j + uazk] # 3 i j k
rx ry rz
Fx Fy Fz
3Ma = ua
# (r * F)a
ua
My = j # MO = j # (r * F),
MOMyMO = r * F
*Take a moment to expand this determinant, to show that it will yield the above result.
r
O
MO ! r " FMa
ua
a
Axis of projection
FA
Fig. 4–21
x y
r
j
(b)
z
O
M0 ! r " F
F
u
u My
4 Fig. 4–20Neste caso, determinanamos o torque (momento da força) em relação a qualquer eixo passando pelo ponto O e depois tomamos a projeção deste torque, junto ao eixo de interesse. Neste exemplo, o eixo y, representado pelo vetor unitário j.

Análise Vetorial
~M0 = ~r ⇥ ~F
My = | · ~M0
= | · (~r ⇥ ~F )
Calculando o momento em relação ao eixo O.
Calculando a sua projeção junto ao eixo y

Generalizando discussão.
140 CHAPTER 4 FORCE SYSTEM RESULTANTS
Vector Analysis. To find the moment of force F in Fig. 4–20b aboutthe y axis using a vector analysis, we must first determine the moment ofthe force about any point O on the y axis by applying Eq. 4–7,
. The component along the y axis is the projection ofonto the y axis. It can be found using the dot product discussed inChapter 2, so that where j is the unit vectorfor the y axis.
We can generalize this approach by letting be the unit vector thatspecifies the direction of the axis shown in Fig. 4–21. Then the momentof F about the axis is . This combination is referred toas the scalar triple product. If the vectors are written in Cartesian form,we have
This result can also be written in the form of a determinant, making iteasier to memorize.*
(4–11)
whererepresent the x, y, z components of the unitvector defining the direction of the axis
represent the x, y, z components of theposition vector extended from any point O onthe axis to any point A on the line of actionof the forcerepresent the x, y, z components of the forcevector.
When is evaluated from Eq. 4–11, it will yield a positive or negativescalar. The sign of this scalar indicates the sense of direction of alongthe axis. If it is positive, then will have the same sense as whereasif it is negative, then will act opposite to
Once is determined, we can then express as a Cartesian vector,namely,
(4–12)
The examples which follow illustrate numerical applications of theabove concepts.
Ma = Maua
MaMa
ua.Ma
ua,MaaMa
Ma
FzFy,Fx,
a
rzry,rx,
auax
, uay, uaz
Ma = ua# 1r * F2 = 3 uax
uayuaz
rx ry rz
Fx Fy Fz
3= uax
(ryFz - rzFy) - uay(rxFz - rzFx) + uaz
(rxFy - ryFx)
Ma = [uaxi + uay
j + uazk] # 3 i j k
rx ry rz
Fx Fy Fz
3Ma = ua
# (r * F)a
ua
My = j # MO = j # (r * F),
MOMyMO = r * F
*Take a moment to expand this determinant, to show that it will yield the above result.
r
O
MO ! r " FMa
ua
a
Axis of projection
FA
Fig. 4–21
x y
r
j
(b)
z
O
M0 ! r " F
F
u
u My
4 Fig. 4–20
Ma = ua · ~M0
= ua · (~r ⇥ ~F )
= (uax
ı+ uay
|+ uaz
k) · (~r ⇥ ~F )
M
a
= u
a
· (~r ⇥ ~
F ) =
������
u
a
x
u
a
y
u
a
z
x y z
F
x
F
y
F
z
������
M
a
= u
a
x
(yFz
� zF
y
) + u
a
y
(zFx
� xF
z
) + u
a
z
(xFy
� yF
x
)
Tendo determinado Ma, escrevemos Ma=Maua como um vetor cartesiano.

Pontos Importantes
• O momento de uma força (torque) em relação a um eixo especificado pode ser determinado escalarmente desde que a distância perpendicular da a partir da linha de ação da força até o eixo possa ser determinada. Neste caso, Ma=Fda
• Se utilizarmos a análise vetorial, Ma=ua.(r x F), o vetor unitário ua define a direção do eixo de interesse e r é definido a partir de qualquer ponto sobre o eixo até qualquer ponto sobre a linha de ação da força.
• Se Ma < 0, Ma é oposto a ua

Exemplo: Determine o momento produzido pela força F na figura abaixo. ele tende a girar o tubo em relação ao eixo AB.
142 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
EXAMPLE 4.8
Determine the moment produced by the force F in Fig. 4–23a,which tends to rotate the rod about the AB axis.
SOLUTIONA vector analysis using will be considered for thesolution rather than trying to find the moment arm or perpendiculardistance from the line of action of F to the AB axis. Each of the termsin the equation will now be identified.
Unit vector defines the direction of the AB axis of the rod,Fig. 4–23b, where
Vector r is directed from any point on the AB axis to any point on theline of action of the force. For example, position vectors and aresuitable, Fig. 4–23b. (Although not shown, or can also beused.) For simplicity, we choose where
The force is
Substituting these vectors into the determinant form and expanding,we have
This positive result indicates that the sense of is in the samedirection as
Expressing as a Cartesian vector yields
Ans.The result is shown in Fig. 4–23b.
NOTE: If axis AB is defined using a unit vector directed from B towardA, then in the above formulation would have to be used.This wouldlead to Consequently, andthe same result would be obtained.
MAB = MAB1-uB2,MAB = -80.50 N # m.-uB
= 572.0i + 36.0j6 N # mMAB = MABuB = 180.50 N # m210.8944i + 0.4472j2MAB
uB.MAB
= 80.50 N # m+ 0[0.6102 - 0102]= 0.8944[01-3002 - 0102] - 0.4472[0.61-3002 - 0102]
MAB = uB# 1rD * F2 = 3 0.8944 0.4472 0
0.6 0 00 0 -300
3F = 5-300k6 NrD = 50.6i6 mrD,
rBDrBC
rDrC
uB =rB
rB=
{0.4i + 0.2j} m210.4 m2 2 + 10.2 m2 2= 0.8944i + 0.4472j
uB
MAB = uB# 1r * F2
MAB
0.4 m
(a)
0.3 m0.6 m
0.2 m
C
F = 300 N
B
x
y
z
A
Fig. 4–23
(b)
F
C
B
x
z
MAB
uB
rC
rD
A
D
y
142 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
EXAMPLE 4.8
Determine the moment produced by the force F in Fig. 4–23a,which tends to rotate the rod about the AB axis.
SOLUTIONA vector analysis using will be considered for thesolution rather than trying to find the moment arm or perpendiculardistance from the line of action of F to the AB axis. Each of the termsin the equation will now be identified.
Unit vector defines the direction of the AB axis of the rod,Fig. 4–23b, where
Vector r is directed from any point on the AB axis to any point on theline of action of the force. For example, position vectors and aresuitable, Fig. 4–23b. (Although not shown, or can also beused.) For simplicity, we choose where
The force is
Substituting these vectors into the determinant form and expanding,we have
This positive result indicates that the sense of is in the samedirection as
Expressing as a Cartesian vector yields
Ans.The result is shown in Fig. 4–23b.
NOTE: If axis AB is defined using a unit vector directed from B towardA, then in the above formulation would have to be used.This wouldlead to Consequently, andthe same result would be obtained.
MAB = MAB1-uB2,MAB = -80.50 N # m.-uB
= 572.0i + 36.0j6 N # mMAB = MABuB = 180.50 N # m210.8944i + 0.4472j2MAB
uB.MAB
= 80.50 N # m+ 0[0.6102 - 0102]= 0.8944[01-3002 - 0102] - 0.4472[0.61-3002 - 0102]
MAB = uB# 1rD * F2 = 3 0.8944 0.4472 0
0.6 0 00 0 -300
3F = 5-300k6 NrD = 50.6i6 mrD,
rBDrBC
rDrC
uB =rB
rB=
{0.4i + 0.2j} m210.4 m2 2 + 10.2 m2 2= 0.8944i + 0.4472j
uB
MAB = uB# 1r * F2
MAB
0.4 m
(a)
0.3 m0.6 m
0.2 m
C
F = 300 N
B
x
y
z
A
Fig. 4–23
(b)
F
C
B
x
z
MAB
uB
rC
rD
A
D
y

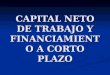
Exemplo: Determine a intensidade do momento produzido pela força F em relação ao segmento OA do encanamento da figura abaixo. 4.5 MOMENT OF A FORCE ABOUT A SPECIFIED AXIS 143
4
EXAMPLE 4.9
Determine the magnitude of the moment of force F about segmentOA of the pipe assembly in Fig. 4–24a.
SOLUTIONThe moment of F about the OA axis is determined from
where r is a position vector extending from anypoint on the OA axis to any point on the line of action of F. Asindicated in Fig. 4–24b, either can be used;however, will be considered since it will simplify the calculation.
The unit vector , which specifies the direction of the OA axis, is
and the position vector is
rOD = 50.5i + 0.5k6 mrOD
uOA =rOA
rOA=
50.3i + 0.4j6 m210.3 m22 + 10.4 m22 = 0.6i + 0.8j
uOA
rOD
rOD, rOC, rAD, or rAC
MOA = uOA# (r * F),
The force F expressed as a Cartesian vector is
= {200i - 200j + 100k} N
= (300 N)B 50.4i - 0.4j + 0.2k6m2(0.4 m)2 + (-0.4 m)2 + (0.2 m)2RF = Fa rCD
rCDb
Therefore,
Ans.= 100 N #m= 0.6[011002 - ( 0.5 )1-2002] - 0.8[0.511002 - ( 0.5 )12002] + 0
= 3 0.6 0.8 0
0.5 0 0.5
200 -200 100
3MOA = uOA# 1rOD * F2
0.1 m
0.3 m
0.2 m0.4 m
0.5 m
0.5 m
(a)
x y
C
A
O
D
z
F ! 300 N
B
Fig. 4–24
xy
z
F
(b)
D
A
CO
rOD
rAD
rAC
rOC
uOA
4.5 MOMENT OF A FORCE ABOUT A SPECIFIED AXIS 143
4
EXAMPLE 4.9
Determine the magnitude of the moment of force F about segmentOA of the pipe assembly in Fig. 4–24a.
SOLUTIONThe moment of F about the OA axis is determined from
where r is a position vector extending from anypoint on the OA axis to any point on the line of action of F. Asindicated in Fig. 4–24b, either can be used;however, will be considered since it will simplify the calculation.
The unit vector , which specifies the direction of the OA axis, is
and the position vector is
rOD = 50.5i + 0.5k6 mrOD
uOA =rOA
rOA=
50.3i + 0.4j6 m210.3 m22 + 10.4 m22 = 0.6i + 0.8j
uOA
rOD
rOD, rOC, rAD, or rAC
MOA = uOA# (r * F),
The force F expressed as a Cartesian vector is
= {200i - 200j + 100k} N
= (300 N)B 50.4i - 0.4j + 0.2k6m2(0.4 m)2 + (-0.4 m)2 + (0.2 m)2RF = Fa rCD
rCDb
Therefore,
Ans.= 100 N #m= 0.6[011002 - ( 0.5 )1-2002] - 0.8[0.511002 - ( 0.5 )12002] + 0
= 3 0.6 0.8 0
0.5 0 0.5
200 -200 100
3MOA = uOA# 1rOD * F2
0.1 m
0.3 m
0.2 m0.4 m
0.5 m
0.5 m
(a)
x y
C
A
O
D
z
F ! 300 N
B
Fig. 4–24
xy
z
F
(b)
D
A
CO
rOD
rAD
rAC
rOC
uOA