Embed Size (px)
Citation preview

12th International Conference on Ground Penetrating Radar, June 16-19, 2008, Birmingham, UK
Linear Inverse Scattering Applied to Monument MonitoringR.Persico1, M.Fedi2,3, B. Garofalo2,G. Leucci4, N. Masini1
1: Istituto per i Beni Archeologici e Monumentali (IBAM-CNR)Lecce, Italy
email [email protected],[email protected]: CNR-INNOVA Regional Centre of Competence for Development and Transfer of Innovation for Cultural and Environ-
mental HeritagePozzuoli (Naples), Italyemail [email protected]
3: Università di Napoli Federico IINaples, Italy
email [email protected]: Department of Material Science, University of Salento,
Lecce, Italyemail [email protected]
Abstract - In this paper we present some examples of Inverse Scattering applied to the diagnosis of architectural monu-ments. In particular, the results will be focused on the Cathe-dral of Matera (in Southern Italy) and the Crypt of the Abbey of Montecorona (near Perugia, in Central Italy). We will give emphasis on some cautions to be taken when apply-ing Inverse Scattering inversion algorithms to real cases.
I. INTRODUCTIONIn the last few years, we have applied linear inverse
scattering algorithm to several GPR datasets. In most cases, we considered data “in the field”, i.e. not finalized to test the inversion algorithm, and measured under un-controlled conditions. We have seen that the application of an inverse scattering procedure can be useful, even if this cannot be taken for granted, essentially due to the in-trinsic strong parametric uncertainties that we might have on the background scenario, on the GPR system and on the noise. However, we have seen that some improvement (or at least some complementary properties) of the recon-struction can be often obtained, but only under the condi-tion that the processing is carefully performed. This usu-ally hinders the achievement of reliable results in real time. In this framework, and under the heuristic view point of our past experiences, we will here describe the main steps needed and some well-advised strategies to process real GPR data by means of a linear inverse scatter-ing algorithm. To our knowledge, this is not often de-scribed in literature. The reasoning will be supported by two case histories.
II. FROM RAW DATA TO INVERSION RESULTIn this paper we refer to a GPR data processing based
on the linear Born Approximation [1]. In particular, we make use of a 2D scalar inverse scattering algorithm in
frequency domain, based on the truncated singular value decomposition (TSVD) of the scattering operator [2]. Here, we avoid any mathematical description of the method, because it is quite well known (see e.g. ref. 3 and references therein), and focus on some possible problems.
A first point to take into account is the comprehension of the band really owned by the data. This is important since the considered processing is, as said, in the fre-quency domain. The choice of the nominal band of the an-tennas might be non-optimal, because the antennas are in-fluenced by the particular scenario where they work. In particular, their nominal behaviour might refer to free space conditions. In this case, especially for dipole-like antennas, the band radiated in contact with the soil can shift toward lower frequencies. This is intuitive if we think of the fact that the wavelength in the soil is smaller than in free space. So, a preliminary visualization of the amp-litude of the spectra of the traces seems the most reason-able way to choose the band. In our experience, the -6 dB band can be a reasonable choice.
A second point is the choice of the spatial step of the data. In fact, in most cases the GPR is trailed on the soil and gathers a (strongly) redundant number of data. Usu-ally, the traces are so many that their processing by means of an inverse scattering algorithm would be problematic, at least with a normal PC. In this case, a decimation is ad-vised, such that the resulting spatial step is of the order of one fourth of the minimum wavelength involved in the soil. Actually, it seems well advised that the step is slightly smaller than this bound, in order to counteract possible underestimations of the dielectric permittivity of the soil. In some other (rare) cases, the original traces are gathered with an equivalent step slightly larger than the given bound, possibly because of an intensive stacking. Even if this situation is theoretically pathologic, some-

12th International Conference on Ground Penetrating Radar, June 16-19, 2008, Birmingham, UK
times the data can still provide interesting information (in particular if large targets are looked for). In particular, an interpolation of the data may be useful in such a case.
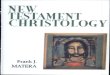
A third point is the choice of the investigation do-main, i.e. the buried area where one looks for the targets (see fig. 1). In fact, the number of data in a radar scan is customarily too large to be processed by means of an in-verse scattering algorithm, even after decimation. Most times it is needed to split the data in subsequent sub-sets, and to process separately each subset. Then the results can be joined side by side to get the final image. It seems well advised that each investigation domain is placed just be-low the relative observation domain (see fig. 1). The ex-tent of the observation and investigation domains shall de-pend on the power of the available computer (customarily it is reasonable to choose an order of a few central wavelengths in the soil, both along the horizontal direction and the depth). The choice of the investigation domain should also depend on the position of the expected more relevant targets. This can be estimated from a glance of the raw data. In particular, if it is possible, the investiga-tion domain should be conceived such as the tops of the more important “hyperbolas” do not occur close to its edges. In fact, in this case, the targets relative to those hy-perbolas would spuriously influence also the results of the adjacent investigation domains. Still, if we see (from raw data) that no meaningful target is present in the shallower part of the soil, the investigation domain can start from a minimum depth dmin greater than zero (see fig. 1), which allows the required computational resources to be reduced.
A fourth point to be considered is the number and the kind of unknowns to choose in order to discretize the problem. This theme is not trivial, but here we limit to the case of pixel basis functions, and to the case of a soil with low losses. In this case, the filtering properties of the lin-ear scattering operator, worked out in the past years in the framework of the Diffraction Tomography DT [4] suggest “conservatively” that the cells have a size of the following order, along the abscissa and the depth respectively:
(1)
(2)
where a and b are the horizontal and vertical extent of the investigation domain (see fig. 1).Eq. 1-2 have been re-trieved by imposing the equality between the size of the cell and one half of the minimum period of the retrievable spatial harmonics (the factor 0.5 derives from the fact that in order to retrieve amplitude and phase of a sinusoidal signal its value in two points is needed). In particular, eq. 1 also accounts for the fact that the observation domain is superposed (and equally long as) the underlying investiga-tion domain [5].
Figure 1. Geometry of the problem
Consequently, the number of unknowns worked out is of the order of
(3)
Where is the maximum frequency, is the rel-ative dielectric permittivity of the soil and is the propagation speed of the light in free space. As stated, eq. 3 is meant to be an order of magnitude. For numerical uniqueness and for stability of the numerical SVD routine, it can be well advised that the comprehensive number of unknowns does not exceed the number of data and that the resultant matrix is not too “rectangular”.
A fifth point is the frequency step. In [5] we suggest that a reasonable choice can be given by:
(4)
If the investigation domain starts from the air soil in-terface, the bound of eq. (4) coincides with the classical frequency step prescribed in any stepped frequency GPR prospecting [6]. However, if the minimum depth dmin of the investigation domain is greater than zero, then eq. (4) provides a larger (and therefore more refined) bound. Both the bound of eq. (4) and those given in eqs. 1-3 are essen-tially conceived in lossless cases and under some approx-imations. In practical cases a frequency step slightly nar-rower than that given in (4) and (if possible) a number of unknowns slightly higher than N is well advised, in order to amortize the effect of the losses and/or a possible un-derestimation of the dielectric permittivity of the soil. In case of a layered soil, one can conservatively put in eqs. 1-4 the permittivity of the optically denser layer.
Up to now, we have considered the model, let now briefly consider the data too. This involves a sixth point. In fact, GPR data are substantially proportional to the total field at the observation point, whereas in inverse scatter-ing we have to process the scattered field at the observa-tion point, i.e. the contribution to the field explicitly due to the buried targets. Limiting to the case of usual B-scans [7], we have shown in [5] that the extraction of scattered

12th International Conference on Ground Penetrating Radar, June 16-19, 2008, Birmingham, UK
field data from the total field data essentially (even if not rigorously) corresponds to some gating and muting of the first part of the gathered signal. In particular, an analysis of the errors [8] can highlight the insufficient robustness of mathematically more rigorous methods. A further sub-tlety arises with regard to this point, and it is whether the band of the signal should be evaluated only after zero tim-ing and muting instead of being estimated on the raw data. In fact, formally we process the scattered field and so we should build up a model tailored on the band of the scattered field rather than on the band of the total field. However, the scattered field is extracted from the total one by means of a not rigorous procedure. In particular, the muting introduces a spurious discontinuity in the traces. Therefore, the spectrum of the extracted scattered field is somehow spuriously enlarged. We have experienced that in most cases it is better to evaluate the band from the raw data.
After building both the model and the data, still a sev-enth point is worth mentioning, and it is the degree of reg-ularization to adopt. Since in this paper we refer to a TSVD algorithm, this means the number of singular func-tions to be retained in the solution. The underlying point is that in GPR prospecting there are strong intrinsic uncer-tainties (about the electromagnetic characteristics of the soil, surface roughness, clutter and so on). Furthermore (and actually this is rarely outlined), the signal to noise ra-tio is unknown in all practical cases, because it depends on the scattered field, that depends in its turn on the buried objects, that are unknown by definition. Even the kind of noise is unknown, because the comprehensive “equiva-lent” noise should enclose the model error too, that again depends on the buried objects. This makes it problematic to determine an a-priori “optimal” regularization thresh-old. In practical cases, it seems better advised to examine the reconstruction at several levels of regularization, so to choose the most reasonable one heuristically. Let us out-line that this does not involve any further computational effort, because the SVD routines calculate all the singular functions, irrespective of how many we exploit for the re-construction.
A quantity that might help in the choice of the threshold might be the spatial content of the singular func-tions. We define it as the sum of the moduli of the singu-lar functions in the space of the unknowns that are re-tained for the solution. In formulas, if is the mth
singular function in the space of the unknowns, and M is the number of retained singular functions, the spatial con-tent SC is given by:
(5)
The practical usefulness of this quantity is explained by the fact that the losses in the soil make the “energy” of the lower order singular functions localized at shallower depths, whereas the energy of the higher order singular
functions is progressively deeper. We can hope (even if we are not guaranteed) to image a target at a certain depth only if there is a meaningful spatial content at that depth. Therefore, it is reasonable to regularize the model in a fashion such as the spatial content “reaches” the depth of interest. In particular, if the data show clear hyperbolas at a given depth but the spatial content doesn’t reach that depth, actually we are over-regularizing the problem.
III. TWO CASE HISTORIESAll the above considerations have been applied, in
particular, to two new cases history presented here. The first one regards the Romanesque Cathedral of Matera (southern Italy). The aim of this prospecting was to invest-igate the presence of previous remains (possibly a crypt) and/or subsidence. The prospecting was performed in May 2007, and a large report that resumes the whole of them has been handed in to the Sovrintendenza dei Beni Arche-ologici of the Basilicata Region, in Southern Italy. Here, we propose a little subset of that prospecting, relevant to data gathered near the altar of the Church. The GPR was a SIR3000 equipped with antennas at 400 MHz, the data have been gathered trailing the antennas. The permittivi-tity has been estimated equal to 5.3, due to the kind of ma-terial (tuff) underlying the naves. In fig. 2, the raw data (after gating of the air interface contribution) is shown, whereas in fig. 3 the corresponding reconstructions are proposed.
Figure 2. Raw data from the Cathedral of Matera

12th International Conference on Ground Penetrating Radar, June 16-19, 2008, Birmingham, UK
Figure 3. Inversion Results from the data of Figure 2Let us specify that the Church was under going restor-
ation, and so a metallic scaffolding filled almost all of the investigated region. Nevertheless, the prospecting has been performed because the antennas were shielded. From the reconstructions, we see a number of focused targets that repeat with a remarkably constant periodicity. This indicates that, in spite of the shielding, the signal was probably influenced by the scaffolding. So, we cannot fully trust the images. The remarkable point is that such a precise periodicity is clearly visible on the reconstructions of fig. 3 but it is not easily identified from the data of fig. 2. Therefore, in this case, the processing gives a determin-ant insight. The second case history regards the crypt of the Abbey of Montecorona, in central Italy. This is a Me-dieval Abbey near Perugia (central Italy), and the purpose of the prospecting was to look for previous structures of ancient age. The GPR was the model P/2000 by Era Tech-nology (UK), equipped with antennas at 250 MHz. In fig. 4 a subset of the raw data is shown, whereas in fig. 5 the corresponding reconstructions are shown.
Figure 4. Raw data from the Abbay of Montecorona
Figure 5. Inversion Results from the data of Figure 4In both the cases histories, the reconstructions have
been obtained by dividing the data in to two parts and joining the results. In the case of the data of Montecorona the soil was optically denser (relative dielectric permittiv-ity equal to 10) and the stronger losses make poorer the images. The processing enhances some of the targets, but in this case it does not provides a substantially deeper in-sight with respect to the raw data. Some discrepancy between the abscissas of figs. 4 and 5 are due to some filling of the data with zeroes performed for the images obtained by means of the inversion algorithm.
REFERENCES[1] Chew, W. C., Waves and Fields in Inhomogeneous
Media, Institute of Electrical and Electronics Engin-eers, Piscataway, N.J., 1995.
[2] Bertero, M., Boccacci, P., Introduction to Inverse Problems in Imaging, Institute of Phisics Publishing, Bristol and Philadelphia, 1998.
[3] Persico, R., “On the role of measurement Configura-tion in Contactless GPR data Processing by Means of Linear Inverse Scattering, IEEE Trans. On Antennas and Prop AP, Vol. 54 n. 7 p. 2062-2071, July 2006.
[4] Lesselier, D., Duchene, B., “Wavefield inversion of objects in stratified environments: from back-propagation schemes to full solutions”, in Review of Radio Science 1993-1996, ed. R. Stone, Oxford Uni-versity press, 1996.
[5] Soldovieri, F., Hugenschmidt J., Persico, R., Leone, G., A linear inverse scattering algorithm for realistic GPR applications, Near Surface Geophysics vol. 5, no. 1, pp. 29-42, February 2007.
[6] Noon, D. A., Stepped-Frequency Radar Design and Signal Processing Enhances Ground Penetrating Radar Performance, Ph.D. Thesis, Department of Electrical & Computer Engineering, University of Queensland, Australia, 1996.
[7] Daniels, D. J., Ground-Penetrating Radar 2nd Edition, The Institution of Electrical Engineers IEE-UK, Lon-don, 2004.
[8] Persico R., Soldovieri F., A Microwave Tomography approach for a Differential Configuration in GPR Pro-specting, IEEE Trans. On Antennas and Prop AP, vol. 54, n. 11, pp. 3541-3548, November 2006.




![Crypt of Cthulhu #38 (1987.Cryptic)[CosmicJukebox] of Cthulhu/Misc/Crypt of Cthulhu/Crypt of... · Eastertide1986/5 foundinLovecraft'scellargallery: Alockedportfolio,boundintanned](https://img.pdfslide.us/doc/110x75/5b975f8609d3f27e758c8cfe/crypt-of-cthulhu-38-1987crypticcosmicjukebox-of-cthulhumisccrypt-of-cthulhucrypt.jpg)