-
1.
Problems (Force Systems)
-
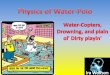
2. Determine the x-y components of the tension T which is
applied to point A of the
bar OA. Neglect the effects of the small pulley at B. Assume
that r and q are
known. Also determine the n-t components of the tension T for
T=100 N and
q=35o.
Problems (Force Systems)
-
q
b
b
r + rcos q
r -
rsin
q
qqqq sin2cos23cossin 22 -- rrrrrAB
qq
qb
qq
qb
sincos
sinTsinTT
sincos
cosTcosTT
y
x
223
1
223
1
-
--
-
x-y coordinates
n-t coordinates (for q=35o and T=100 N)
N..sinsinTT
N..coscosTT
.cos
sinarctan
t
n
o
5474191335100
6766191335100
1913351
351
-
bq
bq
b
q
b
T
T
qq
q
qq
qb
qq
q
qq
qb
sin2cos23
sin1
sin2cos23
sinsin
sin2cos23
cos1
sin2cos23
coscos
-
-
-
-
-
-
r
rr
r
rr
-
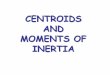
3. In the design of the robot to insert the small cylindrical
part into a close-fitting circular hole, the robot
arm must exert a 90 N force P on the part parallel to the axis
of the hole as shown. Determine the
components of the force which the part exerts on the robot along
axes (a) parallel and perpendicular to the
arm AB, and (b) parallel and perpendicular to the arm BC.
Problems (Force Systems)
-
(a) parallel and perpendicular to the arm AB(b) parallel and
perpendicular to the arm BC.
force which the part exerts on the robot
vertical
P=90 N
vertical
horizontal
//ABP=90 N
30o
AB
45oP//AB
P AB
P//AB = PAB=90 cos45=63.64 N
vertical
horizontal
//BC
P=90 N
45o
BC
30oP//BC P BC
P//BC =90 cos30=77.94 N
P BC=90 sin30=45 N
45o
60o
15o
45o
15o
the robot arm must exert a 90 N force P on the part
-
4. The unstretched length of the spring is r.
When pin P is in an arbitrary position q,
determine the x- and y-components of the force
which the spring exerts on the pin. Evaluate your
answer for r=400 mm, k=1.4 kN/m and q =40°.
Problems (Force Systems)
-
5. Three forces act on the bracket. Determine the magnitude and
direction q of F2 so that the
resultant force is directed along the positive u axis and has a
magnitude of 50 N.
F3=52 N
F1=80 N
Problems (Force Systems)
-
if R=50 N q =? F2 =?
F3=52 N
F1=80 N
R
jiRjRiRR
25sin5025cos5025sin25cos --
Resultant
jiR
13.21315.45 -
iF
801
jFiFF
25sin25cos 222 - qq
jijiF
482013
1252
13
5523
jFiFRF yx
685.5425cos
315.452025cos80
2
2
-
q
q
F
FFx
13.6925sin
13.214825sin
2
2
--q
q
F
FFy
1
2
2
1
685.54
13.69
25cos
25sin
2
2
-
q
q
F
F
NF 14.8835.103
264.125tan
2
-
q
q
-
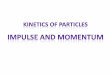
6. The turnbuckle T is tightened until the tension in cable OA
is 5 kN. Express the
force Ԧ𝐹 acting on point O as a vector. Determine the projection
of Ԧ𝐹 onto the y-axis
and onto line OB. Note that OB and OC lies in the x-y plane.
Problems (Force Systems)
-
Ԧ𝐹 acting on point O
𝑭𝑭𝒛
𝑭𝒙𝒚
𝑷𝒓𝒐𝒋𝒆𝒄𝒕𝒊𝒐𝒏 𝒐𝒏𝒕𝒐 𝒍𝒊𝒏𝒆 𝑶𝑩
𝒙
𝒚𝑶
𝑩30o𝒏𝑶𝑩
𝑼𝒏𝒊𝒕 𝒗𝒆𝒄𝒕𝒐𝒓 𝒐𝒇 𝒍𝒊𝒏𝒆 𝑶𝑩
jinOB
60cos30cos
kNF
F
jikjinFF
OB
OB
OBOB
63.2
5.091.2866.0358.1
5.0866.083.391.2358.1
F𝒛=5sin50=3.83 kN
F𝒙𝒚=5cos50=3.214 kN
𝒙𝒚 𝒑𝒍𝒂𝒏𝒆
𝒙
𝒚𝑶
𝑪
65o 𝑭𝒙𝒚
F𝑦= F𝑥𝑦sin65=3.214sin65=2.91 kN
F𝑥= F𝑥𝑦cos65=3.214cos65=1.358 kN
kjiF
83.391.2358.1
𝑷𝒓𝒐𝒋𝒆𝒄𝒕𝒊𝒐𝒏 𝒐𝒏𝒕𝒐 𝒚 − 𝒂𝒙𝒊𝒔
kNjFFy 91.2
-
𝑻𝒉𝒆 𝒄𝒐𝒐𝒓𝒅𝒊𝒏𝒂𝒕𝒆𝒔 𝒐𝒇 𝒑𝒐𝒊𝒏𝒕𝒔 𝑩 𝒂𝒏𝒅 𝑪 𝒂𝒓𝒆 𝐵 (1.6; −0.8𝑠𝑖𝑛30;
0.8𝑐𝑜𝑠30) 𝐵 (1.6;−0.4; 0.693) , 𝐶 (0; 0.7; 1.2)
𝑻𝒉𝒆 𝒑𝒐𝒔𝒊𝒕𝒊𝒐𝒏 𝒗𝒆𝒄𝒕𝒐𝒓 𝑩𝑪 𝒊𝒔 mBCrkjir BCBC
2507.01.16.1507.01.16.1222
// -
𝑻𝒉𝒆 𝒖𝒏𝒊𝒕 𝒗𝒆𝒄𝒕𝒐𝒓 𝒐𝒇 𝑻 𝒓𝑩𝑪 𝒊𝒔 kjikji
nnn TBCBC
253.0548.0797.0
2
507.01.16.1/ -
-
kjikjinTT BC
75.18941175.597253.0548.0797.0750 --
Tension 𝑻 acting on point B in vector form
𝑻𝑻 acting on point B BC
BCBC
r
rTnTT
/
/
7. The cable BC carries a tension of 750 N. Write this
tension as a force 𝑇 acting on point B in terms of the unit
vectors Ԧ𝑖, Ԧ𝑗 and 𝑘. The elbow at A forms a right angle.
-
8. In opening a door which is equipped with a heavy-duty
return
mechanism, a person exerts a force P of magnitude 40 N as
shown.
Force P and the normal n to the face of the door lie in a
vertical plane.
Express P as a vector and determine the angles qx, qy and qz
which the
line of action of P makes with the positive x-, y- and
z-axes.
P𝒛=40sin30=20 N P𝒙𝒚=40cos30=34.64 N
P𝑥= P𝑥𝑦cos20=34.64cos20=32.55 N
kjiP
20848.1155.32
𝒙𝒚 𝒑𝒍𝒂𝒏𝒆
𝒙
𝒚
20o
𝒏
//𝒙
//𝒚
P𝒙𝒚
P𝑦= P𝑥𝑦sin20=34.64cos20=11.848 N
angles qx, qy and qz which the line of action of P makes with
the positive x-, y- and z-axes
6040
20cos77.72
40
848.11cos536.35
40
55.32cos
aaa zyx qqq
-
9. The spring of constant k = 2.6 kN/m is attached to the disk
at point A and to the end fitting at
point B as shown. The spring is unstretched when qA and qB are
both zero. If the disk is rotated
15° clockwise and the end fitting is rotated 30°
counterclockwise, determine a vector expression
for the force which the spring exerts at point A.
Problems (Force Systems)
-
10. An overhead crane is used to reposition the boxcar within a
railroad car-repair shop. If
the boxcar begins to move along the rails when the x-component
of the cable tension
reaches 3 kN, calculate the necessary tension T in the cable.
Determine the angle qxy
between the cable and the vertical x-y plane.
Problems (Force Systems)
-
Tx=3 kN, calculate tension T, the angle qxy between the cable
and the vertical x-y plane.
x-component of 𝑻
kjin
kjin
T
T
154.0617.077.0
145
45
222
kjiTT
154.0617.077.0
kNTT 896.3377.0 (magnitude of 𝑻)
kNTkNT zy 6.0896.3154.04.2896.3617.0
y and z-components of 𝑻
kjiT
6.04.23
Unit vector of 𝑻
𝑻 in vector form
kNTTT yxxy 84.34.232222
598.9896.089.3
84.3cos xy
xy
xyT
Tqq
-
11. The rectangular plate is supported by hinges along its side
BC and by the cable AE.
If the cable tension is 300 N, determine the projection onto
line BC of the force exerted
on the plate by the cable. Note that E is the midpoint of the
horizontal upper edge of
the structural support.
Problems (Force Systems)
-
If T=300 N, determine the projection onto line BC of the force
exerted on the plate by the cable.
x
y
z
𝑪𝒐𝒐𝒓𝒅𝒊𝒏𝒂𝒕𝒆𝒔 𝒐𝒇 𝒑𝒐𝒊𝒏𝒕𝒔 𝑨,𝑩, 𝑪 𝒂𝒏𝒅 𝑬 𝒘𝒊𝒕𝒉 𝒓𝒆𝒔𝒑𝒆𝒄𝒕 𝒕𝒐 𝒄𝒐𝒐𝒓𝒅𝒊𝒏𝒂𝒕𝒆
𝒔𝒚𝒔𝒕𝒆𝒎
𝑨 400, 0, 0 B (0, 0, 0)
𝑪 0, 1200𝑠𝑖𝑛25,−1200𝑐𝑜𝑠25C (0, 507.14, -1087.57)
𝑬 0, 1200𝑠𝑖𝑛25,−600𝑐𝑜𝑠25E (0, 507.14, -543.78)
kjiT
kjinTT T
21.19319.18012.142
33.844
78.54314.507400300
--
--
kjkjinTT BCBC
906.0423.021.19319.18012.142 ---
Unit vector of 𝒍𝒊𝒏𝒆 𝑩𝑪
z
y
25o25o
BCn
kjjknBC
906.0423.025sin25cos --
Projection of T onto line BC
NTBC 26.251
-
12. The y and z scalar components of a force are 100 N and 200
N, respectively. If
the direction cosine l=cosqx of the line of action of the force
is -0.5, write Ԧ𝐹 as a
vector.
5.0200100 - lNFNF zy
75.05.011 22222222 - nmnmnml
yzzy FNFF 61.22322
FnFFFmFF zzyy qq coscos
NFF 2.25861.22375.0
NFF xx 1.129cos - q
kjiF
2001001.129 -
Problems (Force Systems)
-
13. Determine the parallel and normal components of force Ԧ𝐹 in
vector form with
respect to a line passing through points A and B.
35
50°x
y
z
A
B
(3, 2, 5) m
(6, 4, 8) m
F=75 kN
F
kNFxy 311.6435
575
22
kNFF xyx 34.4150cos
kNFF xyy 265.4950sin
kNFz 59.3835
375
22
kjiF
59.38265.4934.41
Cartesian components of 𝑭
Problems (Force Systems)
-
35
50°x
y
z
A
B
(3, 2, 5) m
(6, 4, 8) m
F=75 kN
F
kjiF
59.38265.4934.41
Unit vector of line AB
kjikji
nAB
639.0426.0639.0
323
323
222
Parallel component of 𝑭 to line AB (its scalar value) :
kNF
kjikjiF
nFF AB
14.72639.059.38426.0265.49639.034.41
639.0426.0639.059.38265.4934.41
//
//
//
Parallel component of 𝑭 to line AB (in vector form):
kjikjinFF AB
14.4676.3014.46639.0426.0639.014.72////
Normal component of 𝑭 to line AB (in vector form):
kjiFFF
55.7505.188.4// ---
ABn
-
14. Determine the magnitude and
direction angles of the resultant force
acting on the bracket.
kjiF
xyxyFF
45sin45030cos45cos45030sin45cos450
11
1 -
21 FFFR
kjiF
2.31857.2751.1591 -
Resultant
Problems (Force Systems)
-
kjiF
120cos60060cos60045cos6002
kjiF
30030026.4242 -
Direction angles for 𝑭 𝟐 906045 zyx qqq
1coscoscos 222 zyx qqq
1222 nml
Direction cosines
1cos60cos45cos 222 zq
5.0cos25.0cos2 zz qq
1205.0cos90 - zzz qqq
-
kjiF
30030026.4242 -
Direction angles for 𝑹
029.097.633
2.18cos907.0
97.633
57.575cos418.0
97.633
16.265cos
coscoscos
zyx
zz
y
yx
xR
R
R
R
R
R
qqq
qqq
Direction Cosines of Resultant Force
3.88)029.0arccos(9.24)907.0arccos(3.65)418.0arccos( zyx qqq
kjiF
2.31857.2751.1591 -
Resultant 21 FFFR
kjiR
3002.31830057.27526.4241.159 --
kjiR
2.1857.57516.265
Magnitude of Resultant Force
NRR 97.6332.1857.57516.265 222
-
15. Express the force Ԧ𝐹 as a vector in terms of unit vectors
Ԧ𝑖, Ԧ𝑗 and 𝑘.
Determine the direction angles qx, qy and qz which Ԧ𝐹 makes with
the
positive x-, y-, and z-axes.
Problems (Force Systems)
-
Position vector
kjiABr
kjiABr
AB
AB
657040
254020501525
/
/
-
------
Unit vector
kjin
kji
r
rn
AB
AB
627.0676.0386.0
657040
657040
56.103
222/
/
-
-
kjikjinFF
25.4705075.289627.0676.0386.0750 --
1627.0676.0386.0 222 - nmlnmlDirection cosines
Direction angles
-
17.51627.0cos
47.47676.0cos
7.112386.0cos
zz
yy
xx
n
m
l
qq
qq
qq