Embed Size (px)
Citation preview

1
1
Probabilistic Framework for Onboard Fire Safety
Reliability and Effectiveness Models of Passive and Active Fire Safety Systems (D1.3)
Philipp Lohrmann (BMT), Apurba Kar (IRS), Antoine Breuillard (BV) BMT
- document author - - organisation name -
Kostas Spyrou 4.0
- document approved by - - revision number -
13 January 2011 PU
- submission date - - distribution level -

2
2
Document history
Revision number Date Remarks
1.0 24/07/2009 Skeleton document
2.0 13/10/2010 Final draft for revision by partners
3.0 26/10/2010 Final version
4.0 13/01/2011 Revised version

3
3
Contents
1 Introduction ............................................................................................................................ 6
1.1 Overview ............................................................................................................................ 6
1.2 Current SOLAS regulations for passenger ships ......................................................... 7
1.2.1 Essential systems in SOLAS Chap II-2 Part C ..................................................... 8
1.2.2 Emergency procedures .......................................................................................10
1.3 Objectives ........................................................................................................................14
2 Analysis of Fire Safety Systems ..........................................................................................15
2.1 Automatic Fire Detection Systems ..............................................................................15
2.1.1 System set-up .........................................................................................................15
2.1.2 Smoke Detector .....................................................................................................19
2.1.3 Heat detector ..........................................................................................................20
2.1.4 Fault tree analysis of a Detector System ............................................................22
2.2 Sprinkler Systems ............................................................................................................27
2.2.1 System set-up .........................................................................................................28
2.2.2 Sprinkler Types and their working principles ....................................................30
2.2.3 Regulatory requirements (Reference FSS code) ................................................34
2.2.4 Fault tree analysis of a Sprinkler System ............................................................36
2.3 Water Mist Systems ........................................................................................................36
2.3.1 System set-up .........................................................................................................36
2.3.2 Fault tree analysis of a Water Mist System/Hi-Fog System ............................40
2.4 CO2 Systems ....................................................................................................................40
2.4.1 System set-up .........................................................................................................40
2.4.2 Fault tree analysis of a CO2 system ....................................................................43

4
4
2.5 Foam Systems .................................................................................................................43
2.5.1 System set-up .........................................................................................................43
2.5.2 Fault tree analysis of a Foam System ..................................................................48
3 Reliability model of detection and suppression systems ................................................49
3.1 The generic model ..........................................................................................................49
3.2 Propagation of error .......................................................................................................50
3.3 Maintenance intervals ....................................................................................................50
3.4 Application to concrete systems ...................................................................................51
3.4.1 Heat detector ..........................................................................................................51
3.4.2 Photoelectric Smoke Detector ............................................................................52
3.4.3 Ionisation Smoke Detector ..................................................................................54
3.4.4 Detector panel........................................................................................................55
3.4.5 Sprinkler system .....................................................................................................57
3.4.6 Foam System ..........................................................................................................58
3.4.7 Water Mist System .................................................................................................60
3.4.8 Hi-Fog System .......................................................................................................61
3.4.9 CO2 System ............................................................................................................63
4 Conclusions ..........................................................................................................................65
5 References .............................................................................................................................66
Appendix - Fault trees and diagrams used in the failure rate analysis ..................................68

5
5
Executive summary
A ship fire is a complex scenario that depends on a large range of parameters. While the location and cause of the fire are crucial, the sequence of events immediately after the ignition is of equal importance. In particular, the reaction of the crew and the influence of the fire suppression systems decide whether or not the fire escalates to dangerous proportions. To realistically model a ship fire, it is important to have a quantitative measure for the influence of these factors.
We present a methodology to analyse the reliability of fire suppression systems. For a given (constant) failure rate, we use an exponential curve to describe the reliability as a function of time. The domain of this curve is given by the maintenance interval of the system.
To determine the failure rate of each system, we refer to historical data if possible. In case such data is not available, we perform a detailed fault tree analysis of the system, taking into account redundancies and manual actions. The failure rate derived in this way is then used as input for the exponential model.
For each system, we compute the average and standard deviation of the reliability over the maintenance interval. These figures might be referred to in subsequent scenario analyses carried out later in the project.

6
6
1 Introduction
1.1 Overview
Although the days of wooden ships are long gone, fire remains one of the most dangerous threats to seafaring vessels. In fact, accident statistics (Figure 1) show that fire is the most frequent incident on cruise ships, outstripping collisions and grounding.
Figure 1- Most frequent hazards on passenger ships (1)
Since 1970, the size of cruise ships has roughly doubled every decade, with the latest generation – the Oasis or Genesis class (2) – carrying over 5,000 passengers. This dramatic increase in size poses new challenges for the avoidance and mitigation of fire risk.
To the present day, fire safety regulations, including SOLAS (3), have been based on prescribed designs and performance based approaches. The weakness of this methodology is twofold: (i) it does not provide a systematic framework for testing fire scenarios and (ii) it might be too rigid to accommodate novel designs.
The aim of FIREPROOF is to provide a probabilistic framework that allows a risk-based approach to fire safety. The aim of work package 1 (WP1) is to systematically generate fire scenarios based on the set up of the vessel, including space type and fire safety systems. Each of these scenarios comes with a probability that determines its weight in the risk analysis. The total fire risk of the ship is then given by
𝑅 = 𝑝𝑖
𝑖∈𝜎
× 𝐶𝑖

7
7
where 𝜎 denotes the set of all scenarios, 𝑝𝑖 is the probability for scenario 𝑖, and 𝐶𝑖 is a measure of the consequences (or cost) of this scenario (e.g. loss of life). In theory, this sum runs over all possible scenarios. In practice, however, it is impossible to consider all scenarios, and hence one has to preselect. In particular, all scenarios with low probability and low cost would be excluded.
These scenarios constitute the input for the fire and evacuation models developed under work package 2, which in turn will be used for benchmarking in work package 3.
1.2 Current SOLAS regulations for passenger ships
The IMO convention SOLAS Chap II-2 (see (3)) has been one of the first maritime chapters to be rewritten (December 1996 Amendments) in a goal based manner and with support of a Fire Test Procedures code. The goals and functional requirements are given in the first place. Then the sub-sections are given.
The fire safety objectives of SOLAS Chapter II-2 are to:
prevent the occurrence of fire and explosion;
reduce the risk to life caused by fire;
reduce the risk of damage caused by fire to the ship, its cargo and the environment;
contain, control and suppress fire and explosion in the compartment of origin;
provide adequate and readily accessible means of escape for passengers and crew.
In order to achieve the fire safety objectives, the following functional requirements are embodied in the regulations of Chapter II-2 as appropriate
division of the ship into main vertical and horizontal zones by thermal and structural boundaries;
separation of accommodation spaces from the remainder of the ship by thermal and structural boundaries;
restricted use of combustible materials;
detection of any fire in the zone of origin;
containment and extinction of any fire in the space of origin;
protection of means of escape and access for fire fighting;
ready availability of fire-extinguishing appliances; and
minimization of possibility of ignition of flammable cargo vapour
As mentioned above, the fire risk is composed of a frequency of ignition and a consequent severity. The frequency of ignition can be reduced by the prevention of fire ignition and several theoretical possibilities exist (See (4)). The severity is in fact a probabilistic distribution of severity depending on the random nature of activation and efficiency of fire safety systems as well as the random nature of the protection of persons.

8
8
SOLAS ChapII-2 provides the minimum rules to decrease the frequency of ignition onboard in the second part B (Prevention of fire and explosion), to manage the fire in the third part C (Suppression of fire) and finally to manage the exposed with the fourth part D (Escape). Ro-ro passenger ships have special requirements included in Part G (Special requirements for the protection of vehicles, special category spaces and ro-ro spaces).
In this part, the interest is to exemplify part C with essential systems mandatory onboard passenger ships, including Ro-Pax vessels. The emergency procedures requirements are also presented.
1.2.1 Essential systems in SOLAS Chap II-2 Part C
1.2.1.1 Detection and alarm (Regulation 7)
Smoke detection in service spaces, control stations and accommodation spaces, including corridors, stairways and escape routes within accommodation spaces. Smoke detectors need not be fitted in private bathrooms and galleys and in spaces having little or no fire risk. (regulation 7-5.2)
Manually operated call points throughout the accommodation spaces, service spaces and control stations. (regulation 7-7)
An efficient patrol system shall be maintained so that an outbreak of fire may be promptly detected (Regulation 7-8)
Fire detection alarms for the systems required by paragraph 5.2 centralized in a continuously manned central control station (regulation 7-9)
1.2.1.2 Control of smoke spread (Regulation 8)
Release of smoke from machinery spaces
Draught stops. Air spaces enclosed behind ceilings, panelling or linings shall be divided by close-fitting draught stops spaced not more than 14m apart. In the vertical direction, such enclosed air spaces, including those behind linings of stairways, trunks, etc., shall be closed at each deck. (regulation 8-4)
Atriums equipped with a smoke extraction system. The smoke extraction system shall be activated by the required smoke detection system and be capable of manual control. The fans shall be sized such that the entire volume within the space can be exhausted in 10 min or less.
1.2.1.3 Containment of fire (Regulation 9)
Main vertical zones bounded by "A-60" class divisions. (regulation 9-2.2.1)
Bulkheads within a main vertical zone required to be "A" class divisions shall be at least "B" class or "C" class divisions as prescribed in the tables in regulation 9- 2.2.3 (regulation 9-2.2.2)
Protection of stairways and lifts in accommodation area as per regulation 9-2.2.5
Penetrations in fire-resisting divisions and prevention of heat transmission as per regulation 9-3
Openings in bulkheads and decks in passenger ships as per regulation 9-4.1
Ventilation systems as per regulation 9-7 Among others, the ventilation fans shall be so disposed that the ducts reaching the various spaces remain within the main

9
9
vertical zone; and stairway enclosures shall be ventilated and served by an independent fan and duct system which shall not serve any other spaces in the ventilation systems
1.2.1.4 Fire fighting (Regulation 10)
Automatic sprinkler, fire detection and fire alarm system in all control stations, accommodation and service spaces, including corridors and stairways. Alternatively, control stations, where water may cause damage to essential equipment, may be fitted with an approved fixed fire-extinguishing system of another type. Spaces having little or no fire risk such as voids, public toilets, carbon dioxide rooms and similar spaces need not be fitted with an automatic sprinkler system.
Water supply systems, portable fire extinguishers, Fixed fire-extinguishing systems, Fire-fighter's outfits as per regulation 10
1.2.1.5 Structural integrity (Regulation 11)
The hull, superstructures, structural bulkheads, decks and deckhouses shall be constructed of steel or other equivalent material (regulation 11-2)
1.2.1.6 Protection of vehicles, special category and ro-ro spaces (Regulation 20)
Detection should take into account the effect of ventilation of those spaces
Sample extraction smoke detection systems may be used
Special category spaces shall be patrolled
Structural fire protection insulation should be A60 all around the spaces except when spaces of category (5), (9) and (10) are on the other side
sealable ro-ro spaces : CO2 or inert gas or high expansion foam as per resolution A123 (V) MSC.1/ Circ 1272
other : water spraying system as per resolution A123 (V) MSC.1/ Circ 1272
scuppers and possibly drainage/pumping
Portable fire extinguishers
1.2.1.7 Casualty threshold, safe return to port and safe areas (Regulation 21) and Design criteria
for systems to remain operational after a fire casualty (Regulation 22)
For new ships of 120m in length or having three or more fire zones the new regulation II-2 reg. 21 applies:
Definition of casualty threshold defined as the loss of any space of origin of fire up to the nearest A class boundaries being part of the space if fitted with a fixed fire fighting system (sprinklers) or being part of the adjacent spaces otherwise.
Safe return to port if fire breaks out but no casualty threshold is exceeded: a list of systems should remain operational and safe areas should be designed to accommodate the passengers.
Design criteria for systems if fire breaks out and one casualty threshold is exceeded in one MVZ: listed FSSs should be so arranged and segregated as to remain operational during 3 hours in other MVZs and so that the orderly evacuation and abandonment of the ship is possible.

10
10
1.2.2 Emergency procedures
1.2.2.1 General
Emergency procedures are of primary importance with regards to safety. An effort was undertaken to identify systems required with respect to an emergency situation. In the following, II-2 means SOLAS Chapter II-2; FSS/n Fire Safety Code Chapter n, and LSA/n Life Saving Appliances Code Chapter n.
1.2.2.2 Detection and alarm
Fire detection and fire alarm systems, according to SOLAS Chapter II-2 and FSS Code, rely on fixed fire detection (smoke detection and manual operated call point) and automatic sprinkler. The requirements are mainly encapsulated in:
SOLAS Chapter II-2 Regulation 7 – Detection and alarm
SOLAS Chapter II-2 Regulation 10 – Fire fighting
FSS Code Chapter 8 - Automatic sprinkler, fire detection and fire alarm systems
FSS Code Chapter 9 - Fixed fire detection and fire alarm systems
The following tables summarises main requirements related to fire detection and fire alarm systems. More details, as well as technical implementations, are described in the next chapter.
Smoke Manual Operated Call Point
Sprinkler
Location II-2/7-5.2 In service spaces, control stations and accommodation spaces, including corridors, stairways, escape routes within accommodation spaces and ro-ro spaces (II-2/20.4.1)
II-2/7-7 Throughout the accommodation spaces, service spaces, control stations and ro-ro spaces (II-2/20.4.3.2)
II-2/10-6.1.1 In all control stations, accommodation and service spaces, including corridors and stairways
Section FSS9/2.4.1.1 Grouped into sections
System with individually identifiable fire detectors: a section may serve spaces on both sides of the ship and on several decks, but shall not be situated in more than one main vertical zone.
FSS9/2.4.1.1
Grouped into sections
FSS8/2.4.2.1 Grouped into separate sections.
Each of which shall contain not more than 200 sprinklers. Shall not serve more than two decks and shall not be situated in more than one main vertical zone.
System control: Indication
FSS9-2.5.1.1 Visual and audible fire signal at the control panel and indicating units.
As per smoke
FSS8/2.5.2. Visual and audible alarm signal automatically at one or

11
11
signal
more indicating units
System control: location
FSS9
/2.5.1.2 The control panel: on the navigation bridge or in the continuously manned central control station.
/2.5.1.3 Indicating unit:
- At least one, be so located that it is easily accessible to responsible members of the crew at all times.
- One be located on the navigation bridge if the control panel is located in the main fire control station.
Ditto FSS8/2.5.2. On the navigation bridge or in the continuously-manned central control station.
In addition, in a position other than on the aforementioned spaces to ensure that the indication of fire is immediately received by the crew.
System control: identification
FSS9/2.5.1.3 Indicating units shall, as a minimum, denote the section.
Ditto FSS8/2.5.2. units shall indicate in which section served by the system a fire has occurred
Table -1: Alarm and indication
In addition, a fire patrol shall be maintained so that an outbreak of fire may be promptly detected (II-2/7-8-1).
1.2.2.3 Control and monitoring of systems
General
Active fire protection systems should be controlled and monitored. On passenger ships, this is mainly centralized in a continuously manned central control station (CMCCS). According to SOLAS Chapter II-2 Regulation 3 ―Definition‖:
Continuously manned central control station is a central control station which is continuously manned by a responsible member of the crew
Central control station is a control station in which the following control and indicator functions are centralized:
1. fixed fire detection and fire alarm systems; 2. automatic sprinkler, fire detection and fire alarm systems; 3. fire door indicator panels; 4. fire door closure; 5. watertight door indicator panels; 6. watertight door closures;

12
12
7. ventilation fans; 8. general/fire alarms; 9. communication systems including telephones; and 10. microphones to public address systems.
Control stations are those spaces in which the ship's radio or main navigating equipment or the emergency source of power is located or where the fire recording or fire control equipment is centralized. Spaces where the fire recording or fire control equipment is centralized are also considered to be a fire control station.
Additionally, new ChapII-2 reg. 23 imposes New Passenger ships (>1st July 2010) to have one safety centre be part or be close to the navigation bridge and should
1. be ergonomic 2. have communication means with CMCCSs, bridge, storage rooms for FSSs and fire
equipment lockers 3. be capable to control and monitor of functionalities of FSSs:
all powered ventilation systems;
fire doors;
general emergency alarm system;
public address system;
electrically powered evacuation guidance systems;
watertight and semi-watertight doors;
indicators for shell doors, loading doors and other closing appliances;
water leakage of inner/outer bow doors, stern doors and any other shell door;
television surveillance system;
fire detection and alarm system;
fixed fire-fighting local application system(s);
sprinkler and equivalent systems;
water-based systems for machinery spaces;
alarm to summon the crew;
atrium smoke extraction system;
flooding detection systems; and
fire pumps and emergency fire pumps.
Control and monitoring from the continuously manned central control station
In addition to previously discussed requirements on fire detection alarms, according to II-2/9-3 Passenger ships carrying more than 36 passengers shall have the fire detection alarms centralized in a continuously manned central control station. The following table summarises control and monitoring requirements for ventilation fans and fire doors.
Ventilation fan Fire door
Location II-2/9-7.4.2 In general, ducts should remain in the MVZ
MVZ
Stairway enclosure

13
13
Separated system for stairway enclosures and dangerous areas
Galley boundaries
Ro-ro spaces boundaries
CMCCS Control II-2/7-9.3 Remote shutting down II-2/7-9.3 Remote closing and be capable of reactivation
CMCCS Indicator – Control panel
II-2/7-9.3 closed or off status II-2/7-9.3 & II-2/9-4.1.1.4.6 Open or closed positions
Other requirements
II-2/5-2.1.3 Controls so grouped that that all fans may be stopped from either of two separate positions
II-2/9-4.1.1.4.5 A door closed remotely from the central control station shall be capable of being re-opened from both sides of the door by local control. After such local opening, the door shall automatically close again
Table -2: Control and monitoring: ventilation fans and fire doors
Other Control and monitoring
The following systems could also been controlled and/or monitored from the CMCCS.
Fire damper
II-2/9-4.1.1.8
Smoke extraction system
II2/8-5
Location Where it is necessary that a ventilation duct passes through a main vertical zone division, a fail-safe automatic closing fire damper shall be fitted adjacent to the division
II/9-7.3 Ducts with a free cross-sectional area exceeding 0.075m2 shall be fitted with fire dampers through "A" class bulkheads or decks
Atrium
Control Fail-safe automatic
Be capable of being manually closed from each side of the division
By the required smoke detection system (*)
Be capable of manual control
Indicator Shall be fitted on at least one side of the division with a visible indicator showing whether the damper is in the open position
Table -3: Control and monitoring: Fire damper and smoke extraction system
(*) According to IMO MSC/Circ.1034 (see (5)): ―Guidelines for smoke control and ventilation systems for internal assembly stations and atriums on new passenger ships‖, ―The automatic activation of the smoke extraction system, by means of the smoke detectors, may be delayed for up to 2 min from the activation of the first detector, if not

14
14
acknowledged. This 2 minute delay is intended to allow for crew verification of the smoke detector alarm‖. This Circular is not a mandatory text but should be brought to the attention of interested parties.
1.3 Objectives
As stated above, the aim of work package 1 is to create a methodology for the systematic generation of fire scenarios and their incident probabilities. The aim of task 1.3 is to develop a probabilistic model for the reliability and effectiveness of active and passive Fire Safety Systems (FSS). In this context, active FSS are any systems that are activated in the event of a fire and include detection systems (smoke and heat detectors), automatic
suppression systems (sprinklers, 𝐶𝑂2 systems etc) as well as any manual measures. In contrast, passive FSS include structural features like fire walls and fire doors. The analysis done within this task focuses on the reliability of automatic FSS. A methodology is developed that can in principle applied to any system, provided that its setup is known and the failure rates of its components are available. We will analyse the following systems:
Smoke detectors;
Heat detector;
Alarm panel/detector system;
Sprinkler;
Foam system;
Water mist system and Hi-Fog system;
𝐶𝑂2 system. For each system, we perform fault tree analyses as necessary and express the reliability as a function of time over the maintenance interval.

15
15
2 Analysis of Fire Safety Systems
An important part of this task is the analysis of the Fire Safety Systems used on cruise ships. The reliability and efficiency of these systems are crucial input parameters for any fire simulation model that massively influence the incidence probabilities and consequences of fire scenarios.
In this chapter, we describe in technical detail some typical FSS used on cruise ships. In particular, we give an overview over the functionality of these systems, list its components and briefly describe regulatory requirements. We analyse fault trees of the relevant systems to obtain values for their failure rates.
2.1 Automatic Fire Detection Systems
2.1.1 System set-up
Definition
An Automatic Detection System comprises of detectors, manually operated call points, a control panel displaying the location of the source of a fire and a power supply. Its purpose is to detect a fire at its initial stage and to automatically activate an alarm.
Application as per SOLAS and FP 53/3/1 convention (6):
Table 4 - SOLAS regulation for detection systems
Operation Any required fixed fire detection and fire alarm system with manually operated call points shall be capable of immediate operation at all times (This does not require a back-up control panel). In passenger ships, the fixed fire detection and fire alarm system shall be capable of remotely and individually identifying each detector and manually operated call point. Fire detectors fitted in passenger ship cabins, when activated, shall also be capable of emitting, or cause to be emitted, an audible alarm within the space where they are located.
There shall be not less than two sources of power supply for the

16
16
Power Supply
electrical equipment used in the operation of the fixed fire detection and fire alarm system, one of which shall be an emergency source of power. Separate feeders reserved shall provide the supply solely for that purpose. Such feeders shall run to an automatic changeover switch situated in or adjacent to the control panel for the fire detection system.
Total operation There shall be sufficient power to permit the continued operation of the system with all detectors activated, but not more than 100 if the total exceeds this figure
Smoke detector
Required in all stairways, corridors and escape routes within accommodation spaces shall be certified to operate before the smoke density exceeds 12.5% obscuration per meter, but not until the smoke density exceeds 2% obscuration per meter. Smoke detectors to be installed in other spaces shall operate within sensitivity limits to the satisfaction of the Administration having regard to the avoidance of detector insensitivity or over sensitivity.
Heat detector
Heat detectors shall be certified to operate before the temperature exceeds 78ºC but not until the temperature exceeds 54ºC, when the temperature is raised to those limits at a rate less than 1ºC per min. At higher rates of temperature rise, the heat detector shall operate within temperature limits to the satisfaction of the Administration having regard to the avoidance of detector insensitivity or over sensitivity.
Operating temperature The operation temperature of heat detectors in drying rooms and similar spaces of a normal high ambient temperature may be up to 130ºC, and up to 140ºC in saunas
Control panel
1.Control and monitor input signals from all connected fire and smoke detectors and manual call points
2. Provide output signals to the navigation bridge, continuously manned central control station or onboard safety centre to notify the crew of fire and fault conditions
3. Monitor power supplies and circuits necessary for the operation of the system for loss of power and fault conditions
4. May be arranged with output signals to other fire safety systems including - paging systems, the fire alarm or public address system, fan stops, fire doors, fire dampers, the sprinkler system, the smoke extraction system, the low-location lighting system, the fixed local application fire-extinguishing system, the CCTV system, other fire safety systems; and fuel system quick closing valves.

17
17
The maximum spacing of detectors
Table 5 - Spacing of detectors
Type of detector Maximum floor area per detector (m2)
Maximum distance apart between centers (m)
Maximum distance away from
bulkheads (m)
Heat
37
9
4.5
Smoke
74
11
5.5
Regulatory Requirements (FSS code, FP 53/3/1 ):
Fixed fire detection and fire alarm systems with individually identifiable fire detectors shall be so arranged that:
1. means are provided to ensure that any fault (e.g., power break, short circuit, earth, etc.) occurring in the section will not prevent the continued individual identification of the remainder of the connected detectors in the section;
2. all arrangements are made to enable the initial configuration of the system to be restored in the event of failure (e.g., electrical, electronic, informatics, etc.);
3. the first initiated fire alarm will not prevent any other detector from initiating further fire alarms; and
4. no section will pass through a space twice. When this is not practical (e.g., for large public spaces), the part of the section which by necessity passes through the space for a second time shall be installed at the maximum possible distance from the other parts of the section.

18
18
Cables used in the electrical circuits shall be flame retardant according to standard IEC 60332-1. On passenger ships, cables routed through other main vertical zones that they serve, and cables to control panels in an unattended fire control station shall be fire resisting according to standard IEC 60331, unless duplicated and well separated.
Detectors shall be located for optimum performance. Positions near beams and ventilation ducts, or other positions where patterns of airflow could adversely affect performance, and positions where impact or physical damage is likely, shall be avoided. Detectors shall be located on the overhead at a minimum distance of 0.5 m away from bulkheads, except in corridors, lockers and stairways.
The activation of any detector or manually operated call point shall initiate a visual and audible fire detection alarm signal at the control panel and indicating units. If the signals have not been acknowledged within 2 min, an audible fire alarm shall be automatically sounded throughout the crew accommodation and service spaces, control stations and machinery spaces of category A. This alarm sounding system need not be an integral part of the detection system.
Functionality
A typical detection system has some sensing elements which can sense the presence of smoke or heat caused by a fire in or near to the affected area. Subsequently these sensors send an electrical signal to the fire alarm panel or to specific safety equipment for activation.
When this signal activates the audio-visual alarms on the panel, the concerned crew members are alerted. The panel helps them to quickly identify the fire-affected zone and thus to take appropriate countermeasures like fire extinguishing or evacuation.
The responsible crew member is expected to acknowledge the alarm by pressing a cancel button within two minutes of its activation which silences the hooter/alarm. If this is not done, then the alarm gets activated in all areas/zones.
The control panel has alarms for the following fault situations:
On detection of fire and smoke
Failure of main supply or low voltage of the battery backup system.
Excessive current (fuse gets blown).
Fault in the electrical power cable.

19
19
Technical details of the Fire Control Panel
Primary Power supply: Commonly a non-switched 120 or 240 V AC source supplied from a commercial power utility. In non-residential applications, a branch circuit is dedicated to the fire alarm system and its constituents. "Dedicated branch circuits" should not be confused with "Individual branch circuits" which supply energy to a single appliance.
Secondary (backup) Power supplies: This component, usually sealed, lead-acid storage batteries or other emergency sources including generators, is used to supply energy in the event of a primary power failure.
Initiating Devices: This component acts as input to the fire alarm control unit and are either manually or automatically activated.
Notification appliances: This component uses energy supplied from the fire alarm system or other stored energy source to inform crew members of the need to take action, usually to evacuate.
Safety Interfaces: This interface allows the fire alarm system to control aspects of the built environment and to prepare the place for fire and to control the spread of smoke fumes and fire by influencing air movement, lighting, process control, human transport and exit.
2.1.2 Smoke Detector
Definition
A smoke detector is a device that monitors the smoke concentration in the surrounding air. Most smoke detectors work either by optical detection (photoelectric) or by physical process (ionisation), while others use both detection methods (hybrid system) to increase sensitivity to smoke. Smoke detectors are usually powered by a central fire alarm system, which in turn is powered by the main power supply system with a battery backup.
Types of Smoke Detectors
Optical – This detector type is based on the fact that smoke particles scatter light. It typically consists of a light source (bulb or infrared LED), a lens to collimate the light into a beam, and

20
20
a photodiode or other photoelectric sensor at an angle to the beam as a light detector. In the absence of smoke, the light passes in a straight line and misses the detector. When smoke enters the optical chamber across the path of the light beam, some light is scattered by the smoke particles, directing it at the sensor and thus triggering the alarm.
Ionisation – This type of detector is based on the principle that α-radiation is attenuated by smoke particles. A typical source of radiation is a small sample of Americium-241 which has a half-life of over 430 years. The α-particles emitted by the sample pass through the ionisation chamber, an air filled space between two electrodes. The radiation ionises gas molecules within the ionisation chamber, which allows a small electric current to flow between the electrodes. When smoke particles enter the ionisation chamber, they absorb the radiation and hence reduce this current, which triggers the alarm.
While ionisation smoke detectors tend to be cheaper than optical ones, they are also more prone to false alarms.
2.1.3 Heat detector
Definition
A heat detector is a device which responds to the changes in ambient temperature in the vicinity of the detector. A predetermined threshold value is set in the detector system. When the ambient temperature exceeds this threshold value, it sends out an electrical signal to trigger the alarm. In some cases the automatic sprinkler and detection functions are combined in one single device, such that when the temperature exceeds the threshold limit both the fusible bulb of the sprinkler gets fused causing discharge of water and the detector alarm gets activated simultaneously. Heat detectors are generally of three basic types, depending on the physics of operation: ‗rate of rise‘ type, fixed temperature and rate compensation. Yet again, to increase sensitivity any combination of these two types is used.
Types of heat detectors in comparison
Table 6 - Types of detectors
Criterion Rate of rise
detector
Fixed temperature
Detector
Rate compensation detector

21
21
Combination type heat detectors
This type of detector has multiple sensor elements to respond to the presence of fire and/or smoke. There are many variations in the design of such detectors such as: response from any element, response from a partial combination of all elements or complete response from all elements. Generally, the principle of operation of the first type is to respond to both the rate-of-raise and fixed-temperature scenario. The operation based on rate-of-rise of temperature is very useful and effective in case when fire develops rapidly because it requires much less response time. In contrast, the elements which operate on the principle of fixed-temperature respond slowly to the development of fire because time is required to reach the set temperature, as such this is useful for the case of slowly developing fire. In general, the common features of the construction of a combination detector include a vented air chamber and a flexible diaphragm for sensing the rate-of-rise of temperature. On the other hand, the elements based on the fixed-temperature principle usually consist of a leaf-spring restrained by
Type of detection
Rate-of-rise detectors sense the rate of change in ambient temperature.
Fixed-temperature heat detectors operate when the temperature of the operating elements reaches a specific point.
This type of detector also activates on sensing the rate of rise of ambient temperature. However, at the lower temperature range it acts as a Fixed temperature type and at the higher range of ambient temperature, in particular close to the set value, it works as rate-of-rise type. Thus it provides more warning time before the temperature actually reaches the set value.
Operating range
Operating range is about 12 to 15˚F (7-8˚C) per min.
Operating temperature is about 135˚F (58˚C)
(up to 5°F per minute)
Areas where it is used
Applied in areas subjected to high ambient temperature, i.e. boiler rooms or places which require detectors that operate only if close to fire.
Used mainly in unattended spaces to detect smoldering fires that increase the temperature of a detector above its design value, usually 135°F to 145°F or 185° to 200°F.
Places where there are low rates of temperature change

22
22
a eutectic metal which fuses on reaching the temperature at the element to its preset temperature, closing and hence activating the circuit.
2.1.4 Fault tree analysis of a Detector System
We use the fault tree analysis to obtain a value for the failure rate of an Automatic Detector System. To obtain failure rates for individual components, the OREDA handbook (7), (8) has been used. In cases where it didn‘t provide the required information, RIAC data (9) has been referred to. The type of the failure rate distribution for various components has been assumed to be ‗Exponential‘ as indicated in the OREDA handbook. All abbreviations used in the table below are same as those in the OREDA and RIAC data books.
Item Failure Mode
Mean (λ) per
𝟏𝟎𝟔 hrs
Standard Dev.
Mean time to failure (hrs)
Data Source
Remarks
Pump Centrifugal, Sea Water
MD- Critical
56.17
30.45
17803
OREDA This item has been considered for all sea water lifting pumps in the fault tree.
Valve General
Critical 25.97 21.31 38506
OREDA For all valves same value has
been used.
Compressor general
Critical, breakdow
n
6.20 17.26 161290
OREDA -
Pump centrifugal
General
MD- Critical,
breakdown
3.7 11.38 270270
OREDA For pumps other that sea water lift these
values have been used.
Fire and Gas UD-Critical,
0.43 1.13 232558 OREDA

23
23
detector
General
spurious operation
WB-Critical
PrC-Critical
1.1
3.35
1
909092
-
Table 7 - Failure rates for components from OREDA
The data for the following items has been taken from the RIAC handbook. We have assumed that these items also follow an exponential distribution like those given in OREDA.

24
24
ITEMS Part Description Quality Level
Application Environment
(λ) per
𝟏𝟎𝟔 hrs
Mean time to failure (hrs)
Data Source
Remarks
Hooter Alarm (annunciator, buzzer)
COM GB 5.379207
185901 RAC
No item in name of Hooter in the RAC, data for Alarm considered
Ventilator Ventilator, air circulator
UNK GM 3.717472
269000 RAC
-
Timer Timer(summary)
- - 0.366406
2729213
RAC
-
Relay switch or other failure in panel
Panel ,fire control system
MIL GM 62.37159
16032.94
RAC
-
Switch Fail
Push Button (Summary)
COM GM 38.2907
26116
RAC
Push button type switch has been considered.
Cable connection
Cable, electrical
UNK GM 25.13005
39793
RAC,
-
Audio visual Device
Alarm (Summary)
- - 0.0431
23201856
RAC
-
Battery DB, BL- Battery
Battery , Rechargable
COM N 0.0064
156250000
RAC -

25
25
Power Supply
MS-Uninterrupted
COM
GF
4.288808
233165
RAC
For main supply
ES-Diesel Generator (summary)
COM GF 136.11
7347 RAC
For emergency supply
Pressure switch
Switch, Pressure (Summary)
-
-
19.1454
52231.86
RAC
-
Pressure Gauge
Gauge, Pressure
UNK GM 11.08611
90203
RAC
-
Level Indicator
Indicator, liquid level
UNK GM 16.56534
60367
RAC
-
Strainer
Strainer, Water COM GF 3.903612
256173
RAC
-
Nozzle
Nozzle (Summary)
- - 0.2136
4681647
RAC
-
Solenoid Valve
Valve, Solenoid (Summary)
UNK GM 16.94915
59000
RAC
-
Pipe Pipe, water
COM GF 2.9277
341565 RAC -

26
26
Actuator Pipe(AP)
Pipe UNK GM 0.032
31250000 RAC -
Fiber optic cable
- - - 12.5
80000 Assumed This Item is supposed to be reliable. We have assumed its reliability value as 0.85 over 8000 hrs. of mission time and the MTTF value estimated accordingly.
Table 8 - Component failure rates taken from RIAC

27
27
In some cases, no data is available. In these cases expert judgement has been used to obtain approximate failure rates. The components in question are given in the table below.
ITEMS for which Static Reliability has been assumed*
Assumed Reliability
Operator fails to take action 0.85
DOOR 0.85
Cylinder 0.85
Battery general
0.85
Table 9 - Static reliabilities
*Static reliability is independent of mission time. It is considered as availability on demand. The fault tree for a Detector System is given in the appendix. We have used the software BlockSim to analyse the tree. We obtain the following failure rate for the whole system:
𝜆 = 0.0029 1
𝑑𝑎𝑦𝑠
2.2 Sprinkler Systems
Definition
A sprinkler system is a fixed installation that discharges water in case of a fire. It is generally used for fighting and suppressing fire in control stations, accommodation and service spaces, as well as corridors and stairways.

28
28
Precautionary note: In the spaces where water may cause damage to essential equipment, it may be fitted with an alternative approved fixed fire-extinguishing system (SOLAS Regulation 10.6.1.1).
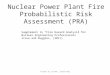
2.2.1 System set-up
A typical sprinkler system consists of three parts: pressure tank, air compressor and sprinkler pump.
A sprinkler system is generally installed for the purpose of fire extinguishing in accommodation areas and service spaces. These are fixed type installations. The system consists of a network of sprinkler heads located in the areas that need to be protected, with an appropriate spacing. Due care needs to be taken for placing the heads so that these do not get damaged by mechanical contacts or impacts. There are different types of sprinkler heads, differing by their mechanism of operation. One very common type is a glass bulb head, used for automatic activation. The glass bulb gets fused at a predetermined temperature in the wide range of 50 °C to 300 °C (10), (11).
Usually the network of sprinkler heads is divided into sections. As per FSS regulations, each of these sections must not have more than 200 sprinkler heads. The sections are equipped with valves which trigger signals for activation of both audible and visual alarms when water flows through them. Thus it is possible to identify which section of the ship has been affected by fire. There is a system fitted in the main control room which automatically keeps track of all the sections of sprinkler heads. Functional diagrams of the system are given below.

29
29
T o B ilg e
P u m p
P u m p s
F ilte rs
F w d . P u m p R o o m
E n g in e
R o o m
S e a C h e s t
Is o la tio n V a lv e s
C o m p re s s o r
T o B ilg e
P re s s u re
T a n k
P re s s u re S w ic h e s
1 2 3
W a te r
c o n n e c tio n
f ro m s h o re
F re s h w a te r
L e v e l
S w ic thL e v e l
in d ic a to r
T o B ilg e
P re s s u re S w itc h e s
1 : C o m p re s s o r S ta rtin g
P s ta r t :- 0 .7 M P a , P s to p :- 0 .8 M P a
2 : S p r in k le r P u m p S ta rtin g
P s ta r t :- 0 .5 M P a
3 : L o w P re s s u re S ig n a llin g
P s ta r t :- 0 .7 5 M P a
J o c k e y
P u m p
S e a C h e s t
h y d ro p h o re
ta n k
L e v e l
in d ic a to r
F ire p u m p
C o m p re s s e d a ir
to a u to m a tic
s p r in k le r s y s te m
re d u c e r
P
P
P re s s u re C o n tro l
P S ta rt - 0 .5 8 M P a
P S to p - 0 .8 M P a
S a fe ty
V a lv e
F w d . P u m p R o o m
T o S p r in k le r H e a d s
Figure 2 - Functional diagrams of a sprinkler system

30
30
The regulations demand that each section of sprinklers can be isolated by one stop valve only. The stop valve in each section should be readily accessible in a location outside of the associated section or in cabinets within stairway enclosures.
Additional isolation valves may be fitted for the purpose of servicing, maintenance or for refilling of antifreeze solutions in the sprinkler piping. Audio-visual alarms are provided for these additional isolation valves when fitted.
The quantities of spare nozzles carried on the ships are as follows (FSS Code):
Table 10 - Nozzles
Total number of nozzles Required number of spares
< 300 6
300 to 1000 12
> 1000 24
The number of spare nozzles of any type need not exceed the total number of nozzles installed of that type.
2.2.2 Sprinkler Types and their working principles
As per Resolution A.800(19), the types of Sprinklers Systems are (12):
Wet pipe systems
Dry pipe systems
Deluge systems
Antifreeze systems
Pre-action system
Water-based extinguishing medium
2.2.2.1 Wet pipe systems
This type of sprinkler is the most widely used system. It is the simplest type of sprinkler and also the only type which can be operated automatically. Its active components are an automatic sprinkler head and usually (but not always) an automatic alarm check valve. This simplicity makes the system very reliable as compared to the other types. The pipelines of the

31
31
water supply system for this type of sprinkler arrangement always remain filled with fresh water (in order to prevent corrosion) under pressure and get activated automatically with the fusing of the sprinkler heads. The sprinkler heads get fused and open for discharge of water only when the temperature reaches a threshold value.
Working Principle: When the sprinkler heads exposed to the threshold temperature, the heat sensitive element (glass bulb or fusible link) is released, allowing water to flow from that sprinkler. The glass bulb or link applies pressure to a cap which acts as a plug preventing water from flowing until the ambient temperature around the sprinkler reaches the design activation temperature of the individual sprinkler. Because each sprinkler activates independently when the predetermined heat level is reached, the number of sprinklers that operate is limited to only those near the fire, thereby maximising the available water pressure over the location of the fire.
2.2.2.2 Dry pipe systems
On vessels operating in areas where the ambient temperature is below the freezing point of water, the wet pipe system is not suitable to use because the static water inside the pipe might freeze, causing blockage of the water flow. In such cases a dry pipe system is a suitable option. In dry pipe systems, the pipes are kept pressurised with air or nitrogen instead of water when the system is in idle state. Water is discharged only after the air/nitrogen is released on fusing of the sprinkler bulb when exposed to the threshold temperature. Hence in the initial stage only air/nitrogen is vented out of the sprinkler head which does not contribute to extinguishing the fire. The actual effect of fire suppression begins when water is discharged through sprinkler nozzles. Due to this delay this system is not as effective as the wet pipe system in the initial stages of a fire.
Working Principle: When the temperature at the sprinkler head reaches the threshold level, it opens out, allowing the air or nitrogen to vent out through the sprinkler head. Thus the pressure in the pipeline drops. This leads to a pressure gradient across the dry pipe valve, allowing water to enter in to the sprinkler piping system. The venting of air or nitrogen from the sprinkler in the initial stage causes the delay in the venting of water from the sprinklers needed to control the fire. Therefore, during the initial stages of fire the dry pipe systems are usually not as effective as wet pipe systems for the suppression of fire.
2.2.2.3 Comparison of Dry Pipe fire Sprinkler systems and Wet Pipe Sprinkler system
Table 11 - Different types of sprinkler systems
Criterion Dry Pipe System Wet Pipe System

32
32
Complexity Dry pipe systems require additional control equipment and air pressure supply components which increases its complexity.
Wet pipe systems are simple, with the only operating components being the automatic sprinkler heads. Pipes are filled with water under pressure so no extra components are required.
Installation and Maintenance costs
The added complexity impacts the overall dry-pipe installation costs, and increases maintenance expenditure primarily due to added service labour costs.
Its simplicity and wet pipe reduces maintenance and installation costs.
Corrosion potential After operation or testing, the dry-pipe sprinkler system‘s piping is drained, but residual water may collect in low spots, and moisture is also retained in the atmosphere within the piping. This moisture, coupled with the oxygen increases pipe internal wall corrosion rates, possibly leading to leaks.
Wet pipe systems are filled with water all the time, so oxygen exposure is reduced, hence less chance of corrosion or leakage.
Application Dry pipe systems are usually only used in spaces in which the ambient temperature may be cold enough to freeze water.
Wet pipe systems cannot be used in places where the ambient temperature drops below the freezing point of water.
2.2.2.4 Deluge Systems
As per IMO Resolution A.800(19), "Deluge" systems are systems employing open sprinklers attached to a piping system connected to a water supply through a valve that is opened by the detection system installed in the same areas as the sprinklers . In these systems, the sprinklers fitted are of open type (i.e. without any bulb) and the sprinkler network piping system is not filled with liquid or gas under normal condition. This type of system is suitable to rapidly

33
33
cover large areas affected by fire. Sometimes it is also used to prevent fire from entering from other adjacent locations.
Under normal conditions (i.e. when there is no fire), the ingress of water into the sprinkler network piping is prevented by a deluge valve fitted at the inter-connection of the water supply line with the sprinkler network piping.
Working Principle: On activation of the automatic detector or manual call point the corresponding signal is transmitted to the control panel, which in turn signals the deluge valve to open, allowing water to pass into the sprinkler network piping system and water is instantly discharged through the sprinkler heads.
2.2.2.5 Antifreeze Systems
This type of system is a wet pipe sprinkler system employing automatic sprinklers attached to a piping network containing an antifreeze solution and connected to a water supply (Resolution A.800(19)).
Working principle: When an automatic sprinkler is exposed to sufficient heat, the heat sensitive element (glass bulb or fusible link) is triggered, allowing antifreeze solution to discharge. Immediately after this, water flows from the sprinkler head.
2.2.2.6 Pre-action Systems
This type of sprinkler system employs automatic sprinklers attached to a piping system containing air that may or may not be under pressure, with a supplemental detection system installed in the same area as the sprinklers (Resolution A .800(19)).
Working Principle: Actuation of the detection system opens a valve that permits water to flow into the sprinkler piping system and to be discharged from any sprinklers that may be open.
2.2.2.7 Construction and Working Principle of a Sprinkler Head
Fusible sprinkler heads can be used for both detection and extinguishing of fire. A typical fusible sprinkler head is covered by a semicircular quartzoid bulb, which contains an expandable liquid. A deflector plate is attached at the end of the bulb. This plate serves the purpose of spraying the water over a larger area (Figure 3). When the bulb is exposed to heat, it causes the liquid inside the bulb to expand, leading to breakage of the bulb, and thus allowing the water to flow from the sprinkler head. The water supply system for this sprinkler arrangement features a tank pressurised with compressed air to keep the water in the pipes at a constant pressure. When the bulb fuses and the water flows out, the pressure in the pipe lines drops, which causes a salt water pump to start automatically. This salt water pump provides a continuous supply of water to the sprinkler system. In case of a wet sprinkler system, the piping and heads are initially filled with fresh water under pressure in order to protect the system from corrosion.

34
34
2.2.3 Regulatory requirements (Reference FSS code)
Table 12 - Regulations on sprinklers
Type of operation -Automatic in operation,
-Capable of both detecting the fire and suppressing the fire.
Pressure Tank capacity
-A pressure tank should have a volume of at least twice that of the charge of fresh water, equivalent to the amount of water which would be discharged in 1 min by the pump.
-Means of replenishing the air under pressure and of replenishing the fresh water charge in the tank
-Provision to prevent passage of sea- water into the tank.
Figure 3 - Sprinkler head

35
35
Power supply
-Not less than two sources of power for the system.
-Sources of power -Main generator and an emergency source. One supply for the pump should be taken from the main switchboard, and one from the emergency switchboard by separate feeders reserved solely for that purpose.
Water-Supply
Back up
-Provision of a redundant means of pumping.
-The capacity of the redundant means should be sufficient to compensate for the loss of any single supply pump or alternative source. One of the pumps may be the main fire pump connected to the sprinkler system.
Temperature rating
In accommodation and service spaces the sprinklers should have a nominal temperature rating of 57°C to 79°C, except that in locations such as drying rooms, where high ambient temperatures might be expected, the nominal temperature may be increased by not more than 30°C above the maximum deck head temperature.
Pump capacity
Pumps and alternative supply components should be capable of supplying the required flow rate and pressure for the space with the greatest hydraulic demand. For the purposes of this calculation, the design area used to calculate the required flow and pressure should be the deck area of the most hydraulically demanding space, separated from adjacent spaces by A-class
divisions. The design area need not exceed 280 m2.
Sprinkler Piping Should not be used for any other purpose.
Isolation Valves Isolation valves used for service, maintenance or for refilling of antifreeze solutions may be installed in the sprinkler piping in addition to the section stop valves, if provided with a means for giving a visual and audible alarm.
Sprinkler position and Capacity
Sprinklers should be placed in an overhead position and spaced in a pattern to maintain an average application rate of not less than 5 l/m²/min over the nominal area covered by the sprinklers.
System Location
-Sprinkler pump and tank shall be situated in a position reasonably remote from any machinery space of category A and -shall not be situated in space required to be protected by sprinkler system.

36
36
Testing requirement at the time of installation (Reference FTP Code)
The response time is expressed as a response time index (RTI), which typically has values between 35 and 250 m½s½, where a low value indicates a fast response. Under standard testing procedures (135 °C air at a velocity of 2.5 m/s), a 68 °C sprinkler bulb will break within 7 to 33 seconds, depending on the RTI. The RTI can also be specified in imperial units, where 1 ft½s½ is equivalent to 0.55 m½s½.
2.2.4 Fault tree analysis of a Sprinkler System
Analogously to the previous section, we perform a fault tree analysis of the system. The component failure rates are given in Table 7, Table 8 and Table 9. Once again, we use the software BlockSim to analyse the fault tree diagram given in the appendix. The resulting failure rate is
𝜆 = 0.00036 1
𝑑𝑎𝑦𝑠
2.3 Water Mist Systems
2.3.1 System set-up
Definition
Water mist systems are fixed installations that produce small droplets of water to control and/or extinguish fires.
Working principle
The system works in two ways to control and extinguish fire. The first effect is to remove oxygen from the atmosphere in the vicinity of the fire and the second one is the cooling effect.
High-pressure water mist systems generate very small droplets of water. When exposed to the heat of fire, these droplets evaporate. As this happens, the vapour displaces the oxygen in the vicinity of the flammable material in the area affected by fire. This helps with the extinction and controlling of fire by disruption of the oxygen supply.

37
37
Water mist systems discharge water at a very high pressure, producing extremely small droplets of water. Unlike the larger drops produced by conventional sprinklers, these smaller particles stay afloat and eventually fill the whole space, creating an atmosphere that impedes fire growth. Moreover, due to their large surface areas, the droplets are very efficient in cooling and hence suppressing the fire.
Typical Schematic Diagram:
Figure 4 - Schematic diagram of a water mist system
Components requirements (FSS Code , MSC/Cir 913):
Nozzle-
An approved type of nozzle with an average distribution of water of at least 5 liters per minute.
Inside Diameter of nozzle at the tip is to be not less than 6 mm.
Corrosion resistant material.
Distribution valves-
To be operated from easily accessible positions outside the spaces to be protected and which will not be readily cut off by an outbreak of fire.
Water Supply Pump-

38
38
To be sufficient to pressurize the piping system at all times and capable of automatically starting to pump on detecting a pressure drop.
The pump and control equipment are to be provided outside the protected space.
If the pump is fed from the sources of electrical power of the main and emergency generator, the emergency generator is to be capable of automatically starting in the event of failure of the main source of electrical power supply.
Water Storage tank
Should be capable of continuously supplying water-based medium for at least 20 minutes.
Note: Specifications for the following items have not been found in the regulations-
1. Operational requirements
2. Capacity/Quantity requirements
3. Specification for air supply, e.g. quantity, pressure etc.
System Description:
Water Mist Systems consist of a high-pressure pump unit with cylinders, section valves, piping system and nozzle heads. Water is supplied via a pump unit or cylinders depending on the system through a variety of different section valves operated either remotely or manually. For easy operation and monitoring a control panel is installed. Water Mist Systems are an alternative to CO2 systems (see below) and are installed in high-risk areas. Sometimes the system is equipped with glass bulb nozzles, which contain detection bulb glass (see the section on sprinklers) to start the system automatically in the event of fire. For some areas, the system can be activated both automatically and manually [MSC/Cir 913]. For the protection of machinery spaces and local risk areas, the system can be equipped with open nozzles and a detection system to operate manually for total flooding or local protection of high-risk areas.
System Configuration:
The main component of the MIST Fire Extinguishing System and their functions are as follows.
Discharge nozzle -Fire extinguishing head
Section valve -Valve for deluge discharge to the hazardous area

39
39
Area valve startup solenoid valve -Control valve to drive air-driven area valves
Water pump -High-pressure pump to feed fire extinguishing water under pressure
Control panel -Startup panel for starter to start up the high-pressure pump, Startup device for area discharge by manual operation
Fire detector (for flame and smoke) -Smoke detector and flame detector to judge the fire area
Visible and audible alarms -Lamps and alarms to warn the persons in the area
Figure 5 - Configuration of a water mist system
Applications:
Water mist systems, as an alternative to CO2 system (see below), can generally be used in the similar spaces as the latter. This includes engine rooms, boiler rooms, cargo spaces, galleys, rooms containing electrical and electronic plants and equipment, fuel and lubricating oil tanks and pumps, flammable liquid storages and paint storages. Although the Water Mist system is considered equivalent to CO2 systems, for large ships with engine rooms of larger heights, this

40
40
system is not as effective as the CO2 system. This system is preferred for installation on small boats, hovercrafts etc. with smaller engine rooms.
2.3.2 Fault tree analysis of a Water Mist System/Hi-Fog System
We have analysed two different systems. The first one is a generic water mist system analysed with the BlockSim software (Figure 28). The resulting failure rate is
𝜆𝑊𝑎𝑡𝑒𝑟𝑀𝑖𝑠𝑡 = 0.0024 1
𝑑𝑎𝑦𝑠
The second system is a Hi-Fog system as used by Carnival Cruise Lines. This system (see Figure 29) was analysed using BV‘s VeriSTAR methodology. The resulting failure rate is
𝜆𝐻𝑖−𝐹𝑜𝑔 = 0.00094 1
𝑑𝑎𝑦𝑠
2.4 CO2 Systems
2.4.1 System set-up
Definition
CO2 systems are fixed installations in an enclosed space that reduce the oxygen content in the atmosphere by the emission of CO2 to an extent where combustion is no longer possible.
Overview
CO2 is well established as an effective medium for fixed fire extinguishing systems. It is widely used in domestic as well industrial houses. On board ships it is used for the machinery spaces and accepted as an alternative to mist and foam fire extinguishing systems (see below). It can be used to fight electrical fire, liquid fire, melted solid fire, solid surface fire, part deep-seated solid fire and gas fire.
The inhalation of CO2 poses a danger to life, and therefore this system is not suitable for spaces occupied by passengers. It can, however, be used in machinery spaces with special precautionary arrangements to ensure complete evacuation before discharging of CO2 in the

41
41
affected space. In particular, the system should only be activated through manual operation and only on confirmation that the space has no soul left inside.
CO2 cylinders should be stored in well ventilated cabinets or lockers in order to prevent accumulation of gases that might be caused by leakages.
Typical Schematic Diagram of Shipboard CO2 system (13):
Figure 6 - Schematic diagram of a CO2 system
Components and its requirements (As per FSS Code)
Cylinders- Should be kept outside protected space.

42
42
Pipes, fittings and nozzles-
Constructed of materials having a melting temperature which exceeds 925 ºC.
Corrosion resistant materials.
Actuation and control systems- Back up power requirements.
Distribution valves – Readily accessible, simple to operate and grouped means of control outside protected space which will not be readily cut-off by an outbreak of fire.
Salient features of the applicable rules (FSS Code, SOLAS)
Quantity of CO2-
Cargo Spaces: Sufficient quantity of CO2 shall be available to give a minimum volume of free gas equal to 30% of the gross volume of the largest cargo space to be protected,
Machinery Spaces: Sufficient quantity of CO2 shall be available to give a minimum volume of free gas equal to the larger of the following: 40% of the gross volume of the largest machinery space so protected or 35% of the gross volume of the largest machinery space protected, including the casing.
CO2 discharge time -
85% of the gas shall be discharged into the space within 2 min (for machinery spaces).
Operational precaution-
Automatic release of fire-extinguishing medium shall not be permitted except as permitted by the administration
Alarm -
Opening of release cabinet door shall automatically activate pre -discharge alarm.
It shall operate for the length of time needed to evacuate the space, but not less than 20 s before medium is released.

43
43
Advantages of CO2 based system
-100% natural, environmentally friendly,
-Does not leave a residue,
-Zero ozone depletion potential.
Disadvantages
-Highly asphyxiating (suffocative),
-Even if discharge CO2 is cold, it has little cooling effect - danger of re-ignition if air is readmitted,
-When discharged, particles of solid carbon dioxide may generate static electricity (CO2 is not an inert medium.
For fault tree diagrams, please refer to the Appendix.
2.4.2 Fault tree analysis of a CO2 system
As in the previous sections, we analyse the fault tree diagram given in the appendix. The resulting failure rate is
𝜆 = 0.0027 1
𝑑𝑎𝑦𝑠
2.5 Foam Systems
2.5.1 System set-up
Definition
Foam systems are fixed installations that produce foam to control and/or extinguish fires.

44
44
Working principle
Foam is generated by the formation of air bubbles from aqueous solutions. Since foam has a lower density than flammable liquids, it remains floating on the surface and creates a ‗blanket‘ on the liquids, cutting off the oxygen supply and thus suppressing the fire.
Components of a typical Foam system: Foam storage tank Mixing system Control panel Foam liquid Emergency fire pump

45
45
P U M P
V A L V E
P U M P
T A N KN O N R E T U R N IN G V A L V E
S T R A IN E R R E D U C E R P U M P R E D U C E R
N O N R E T U R N IN G V A L V E
P R O P O R T IO N E R
V A L V E
V A L V E
F O A M M A IN
IS O L A T IO N V A L V E
L E V E L G A U G E
Figure 7 - Schematic diagram of a foam system

46
46
R e c irc u la tio n L in eF o a m L iq u id
T o F ire M a in
F o a m M a in Is o la tin g V a lv e
F
F ill in g L in e
F o a m T a n k U n it
F o a m M o n ito r V a lv e
D ra inD ra in
F o a m R o o m
ta n k
E
B
CD
L e v e l g a u g e
P re s s u re v a c u u m V a lv e
F lu s h in g L in e
Figure 8 - Configuration of a typical foam system
Regulatory Requirements (FSS Code, SOLAS, FP 53/3/1)
Table 13 - Regulations on foam systems
Quantity of foam Shall be designed to produce foam at the required application rate within 1 min of release.
Quantity of foam -forming liquid
The quantity of foam concentrate available shall be sufficient to produce a volume of foam equal to at least five times the volume of the largest protected space at the nominal expansion ratio, but in any case not less than enough for 30 min of full operation for the largest protected space.
Operation The system shall be capable of manual release, Automatic release of the system shall not be permitted unless appropriate operational measures or interlocks are provided to prevent any local application

47
47
systems required by regulation II-2/10.5.6 of the Convention from interfering with the effectiveness of the system.
Power supply The system shall be supplied by both main and emergency sources of power. The emergency power supply shall be provided from outside the protected machinery space. All electrical components in connection with the foam generating components shall have at least an IP 54 rating.
Warning Alarms Means shall be provided for automatically giving audible and visual warning of the release of the system. The alarms shall operate for the length of time needed to evacuate the space, but in no case less than 20 s.
Filling rate The design-filling rate for the system shall. be adequate to completely fill the largest protected space in 10 min or less
No. of foam producing units
A minimum of two generators shall be installed in every space containing combustion engines, boilers, purifiers, and similar equipment. Small workshops and similar spaces may be covered with only one foam generator.
Distribution of foam producing units
Foam generators shall be uniformly distributed under the uppermost ceiling in the protected spaces including the engine casing. The number and location of foam generators shall be adequate to ensure all high risk areas are protected in all parts and at all levels of the spaces. Extra foam generators may be required in obstructed locations. The foam generators shall be arranged with at least 1 m free space in front of the foam outlets, unless tested with less clearance.
Operation of a foam system
Open sea suction valve and start firewater pump.
Open fire water supply valve.
Open foam liquid non-return valve
Start foam liquid pump (confirm that the flushing valve is closed)
Open foam liquid proportioner valve.
Open monitor as required to bring fire under control

48
48
Recent Developments with respect to the FSS Code
A new chapter 6 of FSS (Ref: FP 53/3/1)
Salient Points:
The system and its components shall be suitably designed to withstand ambient temperature changes, vibration, humidity, shock, clogging and corrosion normally encountered on ships, and manufactured and tested to satisfaction of the Administration in accordance with the requirements of new chapter 6 of FSS (From FP 53/3/1)
Piping, fittings and related components inside the protected spaces (except gaskets) shall be designed to withstand 925°C.
System piping, foam concentrate storage tanks, components and pipe fittings in [continuous] contact with the foam concentrate shall be compatible with the foam concentrate and be constructed of corrosion resistant materials such as stainless steel or equivalent. Other system piping and foam generators shall be galvanized steel or equivalent.
Means shall be provided for the crew to safely check the quantity of foam concentrate and take periodic control samples for foam quality.
Means for testing the operation of the system and assuring the required pressure and flow shall be provided by pressure gauges at both inlets (water and foam liquid supply) and at the outlet of the foam proportioner. A test valve should be installed on the distribution piping downstream of the foam proportioner, along with orifices, which reflect the calculated pressure drop of the system. All sections of piping shall be provided with connections for flushing, draining and purging with air.
2.5.2 Fault tree analysis of a Foam System
As above, we analyse the tree diagram given in the appendix. The resulting failure rate is:
𝜆 = 0.0096 1
𝑑𝑎𝑦𝑠

49
49
3 Reliability model of detection and suppression systems
3.1 The generic model
Following the literature, we define the reliability 𝑅 of a system as the probability that the system will function on demand. In this section, we derive the reliability as a function of
time. We assume that 𝑅 is influenced by two factors:
The system‘s intrinsic failure rate, denoted throughout this report by λ,
The intervals in which the system is checked (and repaired or replaced if necessary).
In general, λ itself is time-dependent. In particular, one would expect to see the well-documented ‗burn-in‘ and ‗wear-out‘ effects, resulting in the familiar ‗bathtub‘ curve. However, as we have no information about the time-dependence of the failure rate, we will assume it to be constant. This is an acceptable approximation for most of the system‘s life span.
We assume that each system is checked after a maximum time 𝑇𝑚𝑎𝑥 . Let 𝐼 = [0, 𝑇𝑚𝑎𝑥 ) denote the maintenance interval of the given system. The reliability of the system at time t is then given by
𝑅(𝜆, 𝑡) = 𝑒−𝜆𝑡 , 𝑡 𝜖 𝐼, ( 1 )
where λ is measured in 1 𝑑𝑎𝑦𝑠 and t in days. A fire can occur at any time during the maintenance interval; hence all values in the range of R are equally likely to occur. We therefore compute the expectation value of R over the maintenance interval and use this number as the system‘s reliability:
𝑅 = 1
𝑇𝑀𝑎𝑥
𝑒−𝜆𝑡𝑑𝑡 = 1
𝑇𝑀𝑎𝑥𝜆 1 − 𝑒−𝜆𝑇𝑀𝑎𝑥
𝑇𝑀𝑎𝑥
0
( 2 )
The variance of R can be computed as usual:
𝑣𝑎𝑟 𝑅 = 𝑅2 − 𝑅 2 = 1
2𝜆𝑇𝑀𝑎𝑥 1 − 𝑒−2𝜆𝑇𝑀𝑎 𝑥 − 𝑅 2
( 3 )

50
50
3.2 Propagation of error
In general, the failure rate λ is not known exactly; often the literature provides error margins on λ. This uncertainty of λ propagates to an uncertainty of the reliability R. Let Δλ denote the error (i.e. standard deviation) of the failure rate λ. The uncertainty of R due to the uncertainty of λ can be computed using Taylor‘s expansion:
Δ𝑅(𝜆, 𝑡) = Δ𝜆𝑘
𝑘!
𝜕𝑘𝑅(𝜆, 𝑡)
𝜕𝜆𝑘
∞
𝑘=1
With R as given in equation ( 1 ), this takes the form
Δ𝑅(𝜆, 𝑡) = Δ𝜆𝑘
𝑘!(−1)𝑘
∞
𝑘=1
𝑡𝑘𝑒−𝜆𝑡
For small values of Δλ we only use the linear term, and hence we obtain
𝛥𝑅 𝜆, 𝑡 ≈ 𝛥𝜆 𝑡𝑒−𝜆𝑡 ( 4 )
3.3 Maintenance intervals
The intervals in which fire detection and suppression systems are tested differ between systems and between ship operators. The testing intervals are regulated by IMO MSC/Circ.850 (14) and are currently under revision (15). In the new version, each system may be the subject to different intervals for different tests. For example, a variety of tests are to be performed on sprinkler systems with intervals ranging between monthly (―verify all control and section valves are in the proper open or closed position, and all pressure gauges are in the proper range‖ etc) and 10-yearly (―perform a hydrostatic test and internal examination of 10% of the system‘s compressed gas cylinders. If one or more cylinders fail, a total of 50% of the onboard cylinders should be tested. If further cylinders fail, all cylinders should be tested‖).

51
51
3.4 Application to concrete systems
We use the above model to obtain reliability curves for the systems considered in Chapter 2. In each case, we plot the reliability against time and if possible give an estimate for the error of each data point. We will use two different maintenance intervals of one month and one year. This will serve to highlight the effect maintenance intervals have on the reliability of the system.
3.4.1 Heat detector
According to the OREDA data (8), the mean critical failure for heat detectors is given by
𝜆𝐻𝑒𝑎𝑡 = 6.4 ± 3.8 ∙ 10−5 1
𝑑𝑎𝑦
We use a maintenance interval of one year. Plugging this into equations ( 1 ) and ( 4 ), we obtain the following reliability data:
Figure 9 - Reliability of Heat detector – yearly maintenance
96.00
96.50
97.00
97.50
98.00
98.50
99.00
99.50
100.00
0 50 100 150 200 250 300 350
Re
liab
ility
/%
Time / Days
Heat Detector -yearly maintenance

52
52
Figure 10 - Reliability of Heat detector - monthly maintenance
Finally, we use equation ( 2 ) and ( 3 ) to obtain the average reliability and standard deviation:
𝑅𝐻𝑒𝑎𝑡 𝑦𝑒𝑎𝑟𝑙𝑦 = 98.8% ± 0.7%
𝑅𝐻𝑒𝑎𝑡 𝑚𝑜𝑛𝑡 ℎ𝑙𝑦 = 99.90% ± 0.06%
3.4.2 Photoelectric Smoke Detector
Analogously to the previous section we use the failure rate given in the OREDA handbook:
𝜆𝑃ℎ𝑜𝑡𝑜 = 4.5 ± 2.7 ∙ 10−5 1
𝑑𝑎𝑦
Using a maintenance interval of one year, we obtain the following reliability data:
99.65
99.70
99.75
99.80
99.85
99.90
99.95
100.00
0 5 10 15 20 25 30
Re
liab
ility
/%
Time / Days
Heat Detector -monthly maintenance

53
53
Figure 11 - Reliability of Photoelectric Smoke detector – yearly maintenance
Figure 12 - Reliability of Photoelectric Smoke detector – monthly maintenance
97.00
97.50
98.00
98.50
99.00
99.50
100.00
0 50 100 150 200 250 300 350
Re
liab
ility
/%
Time / Days
Photoelectric Smoke Detector -yearly maintenance
99.75
99.80
99.85
99.90
99.95
100.00
0 5 10 15 20 25 30
Re
liab
ility
/%
Time / Days
Photoelectric Smoke Detector -monthly maintenance

54
54
Averaging over the maintenance intervals, we obtain:
𝑅𝑃ℎ𝑜𝑡𝑜 𝑦𝑒𝑎𝑟𝑙𝑦 = 99.2% ± 0.5%
𝑅𝑃ℎ𝑜𝑡𝑜 𝑚𝑜𝑛𝑡 ℎ𝑙𝑦 = 99.93% ± 0.04%
3.4.3 Ionisation Smoke Detector
The OREDA failure rate is
𝜆𝐼𝑜𝑛 = 1.0 ± 0.7 ∙ 10−4 1
𝑑𝑎𝑦
This yields the following data:
Figure 13 - Reliability of Ionisation Smoke Detector - yearly maintenance
93.00
94.00
95.00
96.00
97.00
98.00
99.00
100.00
0 50 100 150 200 250 300 350
Re
liab
ility
/%
Time / Days
Ionisation Smoke Detector -yearly maintenance

55
55
Figure 14 - Reliability of Ionisation Smoke Detector - monthly maintenance
The mean reliability over the maintenance intervals is
𝑅𝐼𝑜𝑛 𝑦𝑒𝑎𝑟𝑙𝑦 = 98.2% ± 1.1%
𝑅𝐼𝑜𝑛 𝑚𝑜𝑛𝑡 ℎ𝑙𝑦 = 99.85% ± 0.09%
3.4.4 Detector panel
This is the system described in section 2.1.4. As there is no historical data available, we will use the failure rate derived by fault tree analysis:
𝜆 = 0.00288 1
𝑑𝑎𝑦𝑠
99.40
99.50
99.60
99.70
99.80
99.90
100.00
0 5 10 15 20 25 30
Re
liab
ility
/%
Time / Days
Ionisation Smoke Detector -monthly maintenance

56
56
Mind that no errorbars were derived from the fault trees. With this failure rate, we obtain the following reliability data:
Figure 15 - Reliability of Detector Panel - yearly maintenance
Figure 16 - Reliability of Detector Panel - monthly maintenance
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.00
100.00
0 50 100 150 200 250 300 350
Re
liab
ility
/%
Time / Days
Detector Panel -yearly maintenance
91.00
92.00
93.00
94.00
95.00
96.00
97.00
98.00
99.00
100.00
0 5 10 15 20 25 30
Re
liab
ility
/%
Time / Days
Detector Panel -monthly maintenance

57
57
Taking the average over the maintenance intervals, we obtain the following reliability:
𝑅𝑃𝑎𝑛𝑒𝑙 𝑦𝑒𝑎𝑟𝑙𝑦 = 62% ± 19%
𝑅𝑃𝑎𝑛𝑒𝑙 𝑚𝑜𝑛𝑡 ℎ𝑙𝑦 = 95.8% ± 2.4%
3.4.5 Sprinkler system
As there is no historical data available for this system, we will use the value for λ as derived by fault tree analysis in chapter 2. The value is
𝜆 = 0.00036 1
𝑑𝑎𝑦𝑠
With this failure rate, we obtain the following reliability data:
Figure 17 - Reliability of Sprinkler - yearly maintenance
86.00
88.00
90.00
92.00
94.00
96.00
98.00
100.00
0 50 100 150 200 250 300 350
Re
liab
ility
/%
Time / Days
Sprinkler -yearly maintenance

58
58
Figure 18 - Reliability of Sprinkler - monthly maintenance
Taking the average as above, we obtain the reliability:
𝑅𝑆𝑝𝑟𝑖𝑛𝑘𝑙𝑒𝑟 𝑦𝑒𝑎𝑟𝑙𝑦 = 93.7% ± 3.6%
𝑅𝑆𝑝𝑟𝑖𝑛𝑘𝑙𝑒𝑟 𝑚𝑜𝑛𝑡 ℎ𝑙𝑦 = 99.5% ± 0.3%
3.4.6 Foam System
Analogously to the sprinkler system, we use the value for λ derived in chapter 2,
𝜆 = 0.0072 1
𝑑𝑎𝑦𝑠
98.80
99.00
99.20
99.40
99.60
99.80
100.00
0 5 10 15 20 25 30
Re
liab
ility
/%
Time / Days
Sprinkler -monthly maintenance

59
59
This yields the following reliability data:
Figure 19 - Reliability of Foam system - yearly maintenance
Figure 20 - Reliability of Foam system - monthly maintenance
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.00
100.00
0 50 100 150 200 250 300 350
Re
liab
ility
/%
Time / Days
Foam System -yearly maintenance
75.00
80.00
85.00
90.00
95.00
100.00
0 5 10 15 20 25 30
Re
liab
ility
/%
Time / Days
Foam System -monthly maintenance

60
60
The average reliability is found to be
𝑅𝐹𝑜𝑎𝑚 𝑦𝑒𝑎𝑟𝑙𝑦 = 35% ± 25%
𝑅𝐹𝑜𝑎𝑚 𝑚𝑜𝑛𝑡 ℎ𝑙𝑦 = 89.9% ± 5.6%
3.4.7 Water Mist System
Analogously to the previous sections, we use the failure rate derived by fault tree analysis:
𝜆 = 0.0022 1
𝑑𝑎𝑦𝑠
Thus we obtain for the reliability:
Figure 21- Reliability of Water Mist system - yearly maintenance
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.00
100.00
0 50 100 150 200 250 300 350
Re
liab
ility
/%
Time / Days
Water Mist System -yearly maintenance

61
61
Figure 22 - Reliability of Water Mist System - monthly maintenance
We obtain for the average reliability:
𝑅𝑀𝑖𝑠𝑡 𝑦𝑒𝑎𝑟𝑙𝑦 = 69% ± 16%
𝑅𝑀𝑖𝑠𝑡 𝑚𝑜𝑛𝑡 ℎ𝑙𝑦 = 96.8% ± 1.8%
3.4.8 Hi-Fog System
We use the failure rate derived by the VeriSTAR analysis:
𝜆 = 0.00094 1
𝑑𝑎𝑦𝑠
We obtain the following reliability data:
93.00
94.00
95.00
96.00
97.00
98.00
99.00
100.00
0 5 10 15 20 25 30
Re
liab
ility
/%
Time / Days
Water Mist System -monthly maintenance

62
62
Figure 23- Reliability of Hi-Fog System - yearly maintenance
Figure 24- Reliability of Hi-Fog System - monthly maintenance
65.00
70.00
75.00
80.00
85.00
90.00
95.00
100.00
0 50 100 150 200 250 300 350
Re
liab
ility
/%
Time / Days
Hi-Fog System -yearly maintenance
97.00
97.50
98.00
98.50
99.00
99.50
100.00
0 5 10 15 20 25 30
Re
liab
ility
/%
Time / Days
Hi-Fog System -monthly maintenance

63
63
Thus we obtain for the average reliability:
𝑅𝐻𝑖−𝐹𝑜𝑔 𝑦𝑒𝑎𝑟𝑙𝑦 = 84.7% ± 8.3%
𝑅𝐻𝑖−𝐹𝑜𝑔 𝑚𝑜𝑛𝑡 ℎ𝑙𝑦 = 98.6% ± 0.8%
3.4.9 CO2 System
In chapter 2, we derived the following failure rate:
𝜆 = 0.00271
𝑑𝑎𝑦𝑠
Thus we obtain the following reliability data:
Figure 25- Reliability of CO2 system - yearly maintenance
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.00
100.00
0 50 100 150 200 250 300 350
Re
liab
ility
/%
Time / Days
CO2 System -yearly maintenance

64
64
Figure 26- Reliability of CO2 system - monthly maintenance
This gives the average reliability:
𝑅𝐶𝑂2 𝑦𝑒𝑎𝑟𝑙𝑦 = 63% ± 18%
𝑅𝐶𝑂2 𝑚𝑜𝑛𝑡 ℎ𝑙𝑦 = 96.0% ± 2.3%
91.00
92.00
93.00
94.00
95.00
96.00
97.00
98.00
99.00
100.00
0 5 10 15 20 25 30
Re
liab
ility
/%
Time / Days
CO2 System -monthly maintenance

65
65
4 Conclusions
We have developed a methodology to determine the reliability of fire detection and suppression systems as a function of time, taking into account the effects of regular system checks. The only input required for this method is the failure rate of the system (λ). For several devices, historical data is available and can be used to deduce the failure rate. If such data is not available (as is generally the case for more complex system, like an alarm panel), fault tree analysis can be used to determine the system‘s failure rate. We have demonstrated this in Chapter 2, where we analysed detector, sprinkler, foam, water mist and CO2 systems. The results show a range of reliabilities for these systems. Sprinkler systems show a particularly high reliability. This is apparently due to the presence of potential manual backups for the automatic action of the components in the system. The reliability of detector, CO2 and Water Mist systems is generally in the same order of magnitude. However, CO2 systems are relatively more reliable owing to the existence of some static blocks through AND gates in the fault tree structure. These static blocks represent manual action and have been indicated by blue blocks in the fault trees. Foam system, in contrast, have a significantly lower reliability caused by the presence of large numbers of OR gates in the fault tree structure. Figure 33 in the appendix compares the reliabilities of the five systems analysed by fault trees. The strength of the fault tree method is that it can in principle be used for any system, regardless of its complexity. The disadvantage of this method is the fact that it does not take into account interactions between components and knock-on effects. In other words, the failure probabilities of different components of the same system are not necessarily independent; damage to one component may affect the failure probability of other (neighbouring) components. For this reason, a failure rate derived with the fault tree method is only an approximation of the system‘s actual failure rate. It appears that some of the failure rates derived for this report are unrealistically high (in particular for the foam system) and should be treated with caution. A refined analysis might be required to obtain more reliable results. Nonetheless, the methodology can yield useful results when no other sources of data are available. It is advisable to compare the results of any fault tree analysis with experimental or historical data whenever possible to verify the predictions of the model.

66
5 References
1. Nilsen, O.V. Risk Analysis for Cruise Ships (SAFEDOR, Deliverable 4.1.2). s.l. : DNV, 2007.
2. NRI. Worldcruise Network. [Online] 2010. http://www.worldcruise-network.com/projects/genesis/.
3. MCA. Maritime and Coast Guard Agency. [Online] 2010. http://www.mcga.gov.uk/c4mca/mcga-guidance-regulation/mcga-gr-solas_ii-2.htm.
4. National Fire Protection Association. NFPA 550: Guide to the Fire Safety Concepts Tree. 2007.
5. International Maritime Organization. Guidelines for Smoke Control and Ventilation Systems for Internal Assembly Stations and Atriums on New Passenger Ships. 2002. http://www.imo.org/includes/blastDataOnly.asp/data_id%3D5334/1034.pdf.
6. IMO Sub Committee on Fire Protection. Report to the Maritime Safety Committee. s.l. : International Maritime Organization, 2009. http://www.uscg.mil/imo/fp/docs/fp53-report.pdf.
7. SINTEF Industrial Management. Offshore Reliability Data Handbook. s.l. : OREDA participants, 2002.
8. —. Offshore Reliability Data Handbook. s.l. : OREDA participants, 2009.
9. The Reliability Information Analysis Center. Nonelectronic Parts Reliability Data. 1995.
10. Maritime Training Advisory Board. Marine Fire Prevention, Fire Fighting and Fire Safety. s.l. : Dept. of Commerce, Maritime Administration, 1979.
11. Cote, Arthur E. Operation of Fire Protection Systems. s.l. : NFPA, 2003.
12. IMO Assembly. Revised Guidelines for Approval of Sprinkler Systems. s.l. : International Maritime Organization, 1995. http://www.imo.org/includes/blastDataOnly.asp/data_id%3D22567/A800.pdf.
13. Indian Registry of Shipping Archive.
14. International Maritime Organization. MSC/Circ. 850. 1998. http://www.mpa.gov.sg/sites/circulars_and_notices/pdfs/shipping_circulars/mc00-07a.pdf.
15. Private correspondence with IMO.

67
16. Estimates of the Operational Reliability of Fire Protection Systems. Bukowski R.W., Budnick E.K. and Schemel C.F. s.l. : Fire Protection Strategies for 21st Century Building and Fire Codes Symposium, 1999.
17. J.R., Hall. U.S. Experience with Sprinklers and Other Automatic Fire Extinguishing Equipment. s.l. : National Fire Protection Association, 2010.
18. NTUA. Probabilistic Framework for Onboard Fire Safety - Comprehensive Fire Accidents Database. s.l. : FIREPROOF Deliverable 1.1, 2010.
19. VTT Technical Research Centre of Finland. Survivability for Ships in Case of Fire. s.l. : Final Report of SURSHIP-FIRE project, 2009.
20. NTUA, SSRC. Probabilistic Framework for Onboard Fire Safety - Fire Ignition Model Specification. s.l. : FIREPROOF Deliverable 1.2, 2010.
21. International Maritime Organisation. MSC/Circ. 850. 1998. http://www.mpa.gov.sg/sites/circulars_and_notices/pdfs/shipping_circulars/mc00-07a.pdf.

68
Appendix - Fault trees and diagrams used in the
failure rate analysis
Figure 27 - Foam System on Reliasoft BlockSim

69
Figure 28 - Water Mist System on Reliasoft BlockSim
OR
Water mist fails to suppress fire
SV
Solenoid valve failure
OR
Improper Water Supply
N
Nozzzle Failure
P
Piping damage
OR
Pump failure
V
Pre pump valve failure/ mistakenly closed
MD
Mechanical damage
MS
Main supply failure
ES
Emergency supply failure
AND
Power supply failure
V
Section valve failure/ mistakenly closed
PF
Fail to operate pump

70
Figure 29 - Set-up of the Hi-Fog system

71
Figure 30 - Sprinkler System on Reliasoft BlockSim
Top
No Discharge
O R
A utomatic
Sprinkler Sy stem
Fail to start
O R
Sprinkler Pump
Fail to start
A ND
Pressure
Tank Failure
PG
Pressure
Gauge Failure
E
Jocky pump
Failure
A ND
No Power
Supply
MStF
O perator Fail to start
A ND
No Power
Supply
MS
Main Supply
Failure
ES
Emergency Supply
Failure
ES
Emergency Supply
Failure
MS
Main Supply
Failure
C
C ompressor
Damage
MD
Mechanical
Damage
D
Detection
Failure
PS
Pressure sw itch
Failure
MD
Mechanical
Damage
MD
Mechanical Damage
ES
Emergency Supply
Failure
A ND
No Power
Supply
MS
Main Supply
Failure
RV
V alv e Failure
O R
Emergency Pump
Fail to start on demand
O R
F ire Main Fail to start on demand
MStF
O perator fails
to start
MD
Mechanical Damage

72
Figure 31 - CO2 System on Reliasoft BlockSim

73
Figure 32 - Detector System on Reliasoft BlockSim

74
Figure 33- Reliabilities of systems analysed by fault trees over one year
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.00
100.00
0 50 100 150 200 250 300 350
Re
liab
ility
/%
Time / Days
Sprinkler System
Foam System
Mist System
CO2 System
Detector System
Hi-Fog System