Embed Size (px)
Citation preview

Principles of Pattern Recognition Principles of Pattern Recognition
C. A. Murthy Machine Intelligence Unit Indian Statistical Institute Kolkata e-mail: [email protected]

Pattern RecognitionPattern Recognition
Measurement Space –> Feature Space
–>Decision space
Main Tasks : Feature Selection and
Supervised / Unsupervised Classification
Supervised ClassificationSupervised Classification
ClassificationTwo cases
1. Conditional Probability density functions and prior probabilities are known
2. Training sample points are given

Bayes decision ruleBayes decision rule
M classes class conditional density functions
prior probabilities
Put in class if
Best decision rule Minimizes the prob. of misclassification
)(),.....,(),( 21 xpxpxp M
Nx ℜ∈MPPP ,....., 21
10 << iP Mi ,.....2,1=∀
∑ =M
iP1
1
x
ijxpPxpP jjii ≠∀≥ );()(
i
• We may not know . (Estimation of density functions), Normal distribution
• We may not know
• Error prob. may be difficult to obtain
• Other decision rules are needed
spi '
sPi '

Normal distribution caseNormal distribution case
If and then the
decision boundary is linear.
In general the decision boundary is non-linear
;)()(2
1exp
)2(
1)( 1'
21
−∑−−= −
∑iii
Ni xx
i
xp µµπ
Mi ,.....2,1=
2=M ∑=∑=∑ 21

Suppose we are given n points x1,x2,…xn. Let there be M classes . Let ni of these sample points belong to class i; i=1,2,…M.
K-Nearest Neighbour decision rule
i.e., ∑=
=M
ii nn
1
.
Let x be the point to be classified. Let k be a positiveinteger. Find k nearest neighbors of x among x1,..,xn
Let ki of these nearest neighbors belong to ith class; i=1,2,…M;
Put x in class i if ki > kj ∀j ≠ i
∑=
=M
ii kk
1
.
Minimum distance classifierMinimum distance classifier
Let µ1,µ2,…µM be the means of the M classes. Let d(a,b) denote the distance between a & b. (Examples : Euclidean, Minkowski)
Put x in class i if d(x, µi) < d(x, µj) ∀j ≠ i

Some remarksSome remarks
Standardization & normalizationChoosing the appropriate distance functionProbability of misclassificationCost of misclassification

ClusteringClusteringProblem: Finding natural groups in data set
Example 1:
Example 2:

Clustering (contd..)Clustering (contd..)
Let us assume that the given data set
• No. of clusters K may not be known• Choice of similarity/dissimilarity measure• Algorithms
MnxxxS ℜ⊂= },...,,{ 21

Dissimilarity MeasuresDissimilarity Measures
• Metrics
),...,,( 21'
Maaaa =
),...,,( 21'
Mbbbb =
.1;||),(1
1≥
−= ∑
=pbabad
pM
i
piip
2=p Euclidean distance

Similarity MeasuresSimilarity Measures
∑ ∑
∑==
221),(
ii
M
iii
ba
babas
Other such measures are also available

K-Means AlgorithmK-Means Algorithm• Several versions of K-Means algorithm are available. One version is given below Number of clusters = K
d Euclidean distance 1. Partitions of S into K subsets 2. 3. yi = mean of A1i
4. For put xj in A2i if 1. If A1i=A2i for all i=1,2,…k then stop o.w. Rename A2i as A1i and goto step 2.
MnxxxS ℜ⊂= },...,,{ 21
kAAA 11211 ,...,
Φ==== kAAA 22221 ...
.,...2,1 ki =nj ,...,2,1=
iiyxyxd ijij ≠< 1, ),,()(1
ki ,...,2,1=∀
K-Means Algorithm (contd..)K-Means Algorithm (contd..)
• Number of iterations is usually decided by the user
• provides basically convex clusters
• Non convex clusters may not be obtained
• Two different initial partitions may give rise to two different clusterings

Hierarchical Clustering Hierarchical Clustering TechniquesTechniques
• Agglomerative
• Divisive

Agglomerative TechniquesAgglomerative Techniques
1. N clusters level 12. Clusters at the level i Merge two clusters if (one cluster is reduced) Rename the clusters as3. Repeat step 2 till the required no. of clusters is obtained
}{},...{},{ 2211 nn xcxcxc ===121 ,...,, +− inccc
ji cc , 11 ,),,(),(11
jiccDccD jiji ∀<
inccc −,...,, 21
MnxxxS ℜ⊂= },...,,{ 21
d dissimilarity measure

Agglomerative Techniques Agglomerative Techniques (contd..)(contd..)
)),((),( yxdMinBAD
ByAx
∈∈
=
)),((),( yxdMaxBAD
ByAx
∈∈
=
• single linkage. • complete linkage.
• several other such ‘D’s can be considered.• single linkage provides non-convex clustering generally.

Feature selectionFeature selection
Feature X1, X2,…,XN
b no. of features to be selected. b < N
Uses :Reduction in computational complexityRedundant features act as noise. Noise
removalInsight into the classification problem.

Steps of feature selectionSteps of feature selection
Objective function J which attaches a value to every subset of features is to be defined.
Algorithms for feature selection are to be formulated.

Objective functions for feature Objective functions for feature selection (Devijver & Kittler)selection (Devijver & Kittler)
Probabilistic separability (Chernoff, Bhattacharyya, Matusita, Divergence)
Inter class distance

Feature Selection Criteria:Supervised Criterion:
ωi i = 1, …, M : classesni, i = 1, …, M : number of points in class i
Pi : a priori probability of class ixik : kth point of ith class
1. Interclass Distance Measures:
(notations)
∑∑∑∑====
=j
jlik
i
ji
ji
n
l
xxn
knn
1
),(
1
1c
1j
Pc
1i
P2
1 J δ
δ : Euclidean, Minkowski, Manhattan
Reference:Devijver & Kittler, Pattern Recognition: A Statistical Approach, Englewood Cliffs, 1982

2. Probabilistic Separability Measures:
Bhattacharyya Distance:
[ ] dxxx2
1
1B | p() |p(ln - J ∫ )= 2ωω
3. Information Theoretic Measures:
Mutual Information:
dxx
xx i
i
M
ii )p(
) | p(ln ) | p(PJ
1I
ωω∫∑=
=
Difficulty: Computing the probabilities.Empirical estimates are used.

Unsupervised Criterion:
Entropy (E):Similarity between points xi and xj:Sij = e –αδ(xi,xj) i,j = 1, …, l
)S-log(1)S1()log(S
1
S
1ijijij
l
jij
l
i
E −+==
= ∑∑
Other unsupervised indices:
•Fuzzy Feature Evaluation Index•Neuro-fuzzy Feature Evaluation Index

Search Algorithms:
If total number of features = D
Computational complexities:
• Exhaustive search [(DCd)] D =100 and d =10 the no. of computationsis greater than 1013.
• Branch and Bound(gives optimal set for a class of evaluation criteria)
Worst case: (DCd)
Number of features to be selected = d
⇒

Algorithms for feature Algorithms for feature selectionselection
Sequential forward selectionSequential backward selection(l,r) algorithmBranch and bound algorithm

Sequential forward selectionSequential forward selection
Ao = φ .
Ak denotes the k features already selected
Let a1∈ {X1,…XN} – Ak be such that J(AkU{a1}) ≥ J (AkU{a}) ∀a∈{X1,…XN} – Ak then Ak+1=AkU{a1}.
Run the program b times

• Sequential Forward/Backward Search(greedy algorithms, very approximate, gives poor result on most real life data)
• Sequential Floating F/B Search (l-r algorithm)
(relatively better than SFS/SBS)
Non-Monotonicity Property:“Two best features are not always the best two”

KDD ProcessKDD Process
Data Preparation
• Data Condensation
• Dimensionality Reduction
• Noise Removal
MachineLearningPatternRecognition
KnowledgeExtraction/Evaluation
Redu-cedClean
Data
RawData
Data Mining
Knowledge
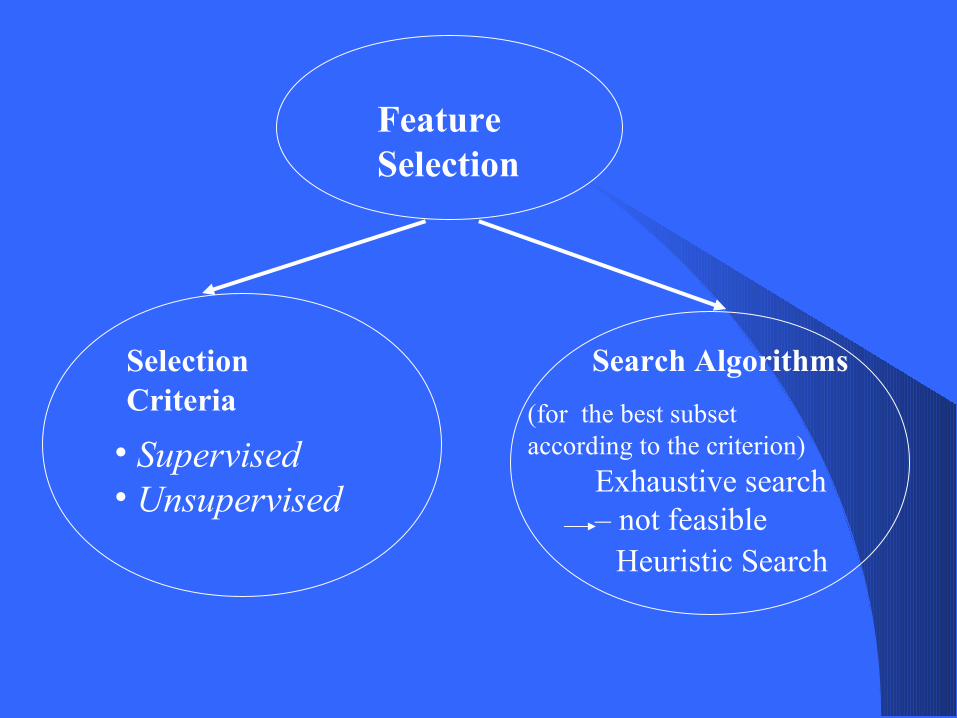
FeatureSelection
Selection Criteria
Search Algorithms
• Supervised• Unsupervised
(for the best subset according to the criterion)
Exhaustive search – not feasible
Heuristic Search
Difficulties:
For data mining applications involvingdatasets large both in dimension (D)and number of samples (l):
• Search is time consuming/does not obtain the optimal feature subset.• Computation of feature evaluation criterion is time consuming. (most often of polynomial in l)• The criteria are specific to classification/ discrimination (supervised) and convex clustering (unsupervised) – not suited for general data mining tasks.

Thank You!!