Embed Size (px)
Citation preview

EDWARD M. M IKRAIL *Purdue University
Lafayette, Ind. 47907 U.S.A.
Principles and Applications ofAnalytical Mirror PhotogrammetryUseful for dentistry and lunar Surveyor I mission.
(Abstract on next page)
INTRODUCTION
I N CONVENTIONAL PHOTOGRAMMETRY thebasic condition for the spatial determina
tion of an object is that it must be recorded intwo nonidentical photographs. This is afundamental concept of stereophotogrammetry for which either the camera is movedbetween exposures, or the camera is heldstationary and the object itself is displaced.The net outcome is that two photographs areobtained which represent two different perspective views of the object.
There is another way of obtaining twodifferent perspective views without having tomove ei ther the camera or the obj cct. This isachieved by placing a plane mirror close tothe object in such a way that the camerawould register not only the object but also itsmirror reflection. Hence, on the one plate twodifferent perspective views are obtained withan amount of separation depending on therelative positions of the object, mirror, andcamera. The only point to note is that themirror-reflection of the object is left-rightreversed.
In the early application of this concept ofmirror photogrammetry (see references 2 &3), the image of the mirror-reflection, heretofore referred to as the satellite image, wasrectifiedt by analog means. This entailed theuse of certain photographic processes to obtain two plates that were compatible. Furthermore, these plates were then utilized in aphotogrammetric instrument for opticalmechanical resti tu tion. The end prod uct wasnormally a topographic map.
* Prepared for presentation in the program ofCommission II I at the Eleventh Congress onPhotogrammetry, Lausanne, Switzerland July1968. '
t The word rectified is used here in a broad senseto f!l~an. reversing the left-right image to a correctposltlO11lng.
In this paper we will attempt to show that,al though the basic concept was last mentioned over a decade ago, it is still of considerable interest and usefulness. Unlike theearly applications, however, the presenttreatment has as its basis the use of analytical, rather than analog, techniques.
GEOMETRY OF MIRROR PHOTOGRAMMETRY
The basic idea of mirror photogram metryis fairly simple, and its uses are also simple ifthe mirror plane and the camera axis areparallel. If, however, the position of themirror changes or is not accurately knownbeforehand, the geometry gets progressivelycomplex. For this reason, in the subsequentparagraphs four different cases will be treateddepending on the relative posi tion of themirror with respect to the camera axis. In allthese cases, the camera axis is assu med to behorizontal and the object space coordinatesystem has its origin at the camera center, itsX-axis toward the mirror, and its Y-axisalong the optical axis.
CASE A: MIRROR VERTICAL AND PARALLELTO CAMERA AXIS
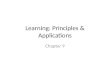
As mentioned above, this is the simplestcase which is shown in Figure 1. A triangularpyramid 1, 2, 3, 4 is photographed by acamera C such that the base 1, 2, 3 lies in thesame horizontal plane as the camera axis(i.e., the XY-plane). The plane mirror isplaced at a distance d from the camera and isboth vertical and parallel to the optical axis.The mirror reflection of the pyramid is shownas I, 2, 3, 4: and is photographed as the satellite image 1', 2', 3', 4', while the pyramid itself is photographed as the main image 1, 2, 3,4. These two images are then used as conjugate images for spatial restitution of theobject.
To illustrate the applicability of stereo-
1071

1072 PHOTOGRAMMETRIC ENGINEERI G
photogrammetry, we seek to show that theseconjugate images are equivalent to photographing the object from two camera stations. I n Figure 1, C represents the mirrorreflection of the camera C, which in turnwould photograph the object at i, 2, 3, 4.These image points would then be referred tothe reflected coordinate axes, X, il, which constitute a left-handed system. Since such a
system is not compatible with the coordinatesystem of the original camera (i.e., left camerain the stereopair), a reflection matrix R needbe applied to yield the correct system, X r Zrr
for the right camera. Hence, the coordinatesof images on the right plate (shown in negative position in Figure 1) are obtained fromthe satellite images by the reflection transformation
ABSTRACT: The basic principle underlying stereophotogrammetry is the factthat the object space is recorded on two photographic plates representing two different perspective views. Although the majority of conventional applications ofthis principle have depended on different photographs of the object itself, recentapplications entail photographs of mirror reflections of the object. These maybe used by themselves or in conjunction with photographs of the object as well.This paper presents the geometric principles of "mirror photogrammetry."First, different cases of photo-pairs each composed of one photograph of the object and one of its mirror-reflection, are studied. Next, the case of stereo-pairseach formed from two photographs of two different mirror-reflections of the object is discussed. Throughout the development, analytical methods of reductionare emphasized. "Reflection" matrices necessary for operating on image-coordinates on photographs of mirror-reflections are derived. One of the possible applications discussed is the use of such photographic systems to close-rangephotogrammetry particularly as applied to dentistry. This is followed by a moreimportant application, namely that involved with analytical reduction of lunarphotographs acquired by softlanded vehicles. These laUer photographs are alltaken of mirror-reflections of lunar surface and not the surface itself.
where (x' , z' )8 are the plate coordinates of thesatellite images. With the two sets of coordinates (x, z)/ and (x, Z)T' the spatial objectcoordinates can be easily determined realizingthat Figure 1 represents the conventionalnormal case of terrestrial photogrammetry.The coordinates of the right camera C, whichare also the base com ponen ts, are given by:
Xc = B. = 2d
Yc = By = 0 (2)
Zc= B, = o.Also, the orientation angles of the right camera into the object system are all zero with acorresponding unit orientation matrix.
--f'--T-T---r--'x:-x, CASE B: MIRROR VERTICAL AND CONVER
GE! T TO CAMERA AXIS
This case is illustrated in Figure 2. Theplane of the mirror is vertical and makes anangle 0 with the camera axis. The virtual rightcamera is shown as C and its axis makes anangle 20 with the actual, or left, camera axis.I t can be easily ascertained that the reflection
·rJ/1 \',
/ I \ _,
/ I >' "-I / - -,
I iYf-- - ~~i/ / //
/ / /I I // /
//
//
,.
FIG. 1. Case A-mirror vertical and parallelto axis of the camera.

PRINCIPLES AND APPLICATIO S OF ANALYTICAL MIRROR PHOTOGRAMMETRY 1073
FIG. 2. Case B-mirror vertical and convergenttoward the axis of the camera.
transformation of Equation 1 holds true forthis case. Furthermore, the coordinates ofthe right camera (base components) can beobtained, by inspection, from Figure 2 as
(4)
FIG. 3. Case C-mirror inclined to the horizontal plane (900
-")') but parallel to the axis of thecamera.
J\l'1'~4
right camera (i.e., the base components)would be:
lJo
Xc = Bx = 2d cos ")'Yc = By = 0
Zc = B, = 2d sin ")'.
Furthermore, it is easily seen from Figure 3that the right plate coordinates are obtainedfrom the satellite image coordinates using thesame reflection transformation given byEquation 1.
Thus, if d and -yare known, all the elemen tsof exterior orien tation can be com pu ted.vVith the proper plate coordinates, one canthen compute the coordinates of all objectpoints.
CASE D: MIRROR PLANE NEITHER VERTICAL
NOR PARALLEL TO CAMERA AXIS-GENERAL
CASE
In the three cases previously discussed, itwas possible to illustrate the geometrythrough projection views. This case, however,is considerably more complex so that it wouldrequire too many auxiliary projections which
(3)
"-~;\ ",-". '0 1
." •.1'._+%.f
Xc = B, = 2d cos 0
Yc = By = 2dsinOZc = B, ;= 0
where d is the distance between the camera Cand the mirror. Knowing the left plate coordinates, the reflected satelli te coordinates, thebase components, and the axes convergenceangle 20, the computation of object spatialcoordinates becomes a straightforward matter.
CASE C: MIRROR INCLINED TO THE HORI
ZONTAL PLANE (90--y) BUT PARALLEL TO
CAMERA AXIS
Figure 3, in plan view and a number ofauxiliary projections, shows the geometry ofthis case. Here, the plane of the mirror deviates an angle -y from the vertical plane butstill remains parallel to the optical axis. Because the x-axis Xl of the left negative makesan angle (900 --y) with the plane of the mirror,its reflection, or x-axis (also the negative x T
axis), would make the same angle wi th themirror. Hence, the angle between X T and Xl
axes (and correspondingly ZT and Zl axes) is 2-y.This is equivalent to having a relative swingangle of 2-y (in the vertical plane of the twonegatives) between the two camera systems.
If the distance between the left camera Cand the mirror is d, the coordinates of the
",

1074 PHOTOGRAMMETRIC E GINEERING
/;'/ /
x /
p
x
CD = DC = d/cos y
CE = BC = CD/sin 0 = d/cos y sin O.
Thus
. CJ:: Z, 2d sin ysm 0/ = === = -= = -----
BC BC d/cos y sin y
or
sin 0/ = sin 2 y sin 0
DJ:: = CE - CD = 2d cos y - d/cos 0
= d (2 cos' y - 1)/cos y
ED = CD cot 0 = d cot o/cos y.
Thus,
lana = DE/SD = d (2 cos' y - 1)/d cot 0
or
(6)
FIG. 4. Case D-mirror plane neither vertical norparallel to the camera axis: the general case. then
tan a = tan 0 (2 cos' y - 1)
CF = CF = CD/cos 0 = d/cos 0 cos y,
(7)
Hence, the Ii rst rotation is (0' +0 = 0), thesecond rotation is t/; = 0, and the third rota-
. CE ZC 2d sin ysm(3 = ~ = ~ = -----'-
CF CF d/cos 0 cos y
With the three angles t/;, 0' and (3 evaluatedby Equations 6, 7, and 8, the following arethe three sequential rotations:
First rotation, (0+0') about Z X --> YSecond rotation, t/; about Xl (once
rotated) ZI--> Y 1
Third rotation, (3 about Y2 (twicero~~) h-->~
After these rotations are performed, theX 3-axis is reAected thus leading to the X YZsystem shown.
As this is the general case, we will show thatall the other three cases can be deduced fromthis by enforcing the proper conditions.
(i) If 0=1'=0, then t/;=0'=(3=0 and thethree rotation angles are zero. That is, theright camera system is parallel to that of theleft which can be ascertained from Figure 1representing Case A.
(ii) If 1'=0, but O~O, then from Equation6t/;=0, from Equation 7 0'=0, from Equation8 (3 =0.
Thus, the first rotation is (0' +0 = ZO), thesecond rotation is °as is the third rotationwhich is Case B as shown in Figure 2.
(iii) If 'Y~O, but 0=0, then from Equation6 t/;=O, 0'=0, (3 = Z'Y.
(8)sin (3 = sin 2 y cos o.
or
CE = 2d cos y.
Hence,
Xc = B x = CE cos 0 = 2d cos y cos 0
Yc = By = CE sin 0 = 2d cos y sin 0 (5)
Z, = B, = CC sin -y = 2d sin -yo
CA = AC = d
As a check on these equations, if I' =0 =0,they reduce the Equation 2; if'Y=O, they reduce to Equation 3; and if 0=0, they reduceto Equation 4.
To obtain the orientation of the rightcamera system with respect to the given leftsystem, we lirst note that the former X YZ isa left-handed system, whereas the latterX YZ is right-handed system. Therefore, toarrive at X YZ from X YZ we perform a sequence of rotations, then a reRection of oneaxis, which we will choose to be the X-axis.In order to obtain the values of the sequentialrotations (in this case there are three of them)we start by derivi ng the followi ng auxiliaries:Referring to Figure 4,
and
might be somewhat confusing. Consequently,Figure 4 represents a three-dimensional viewof the case where the mirror plane makes anangle (900 -I') wi th the horizontal plane (X Y), and its line of intersection with it makesan angle 0 with the camera axis.
If d denotes the length of the perpendicularfrom the camera station C to the plane of themirror, the coordinates of the right station Care obtained as follows:

107'-PRINCIPLES AND APPLICATIONS OF ANALYTICAL MIRROR PHOTOGRAMMETRY v
tion is (3 = 2/'. This is the same as Case C asdemonstrated by Figure 3.
Through all the four cases discussed so far,the six elemen ts of exterior orien tation of theright photograph were shown to be determined from at most three parameters, /" (J,
and d. If these parameters are known, thenthe photogram metric problem red uces to asimple determination of the intersections ofconj ugate rays. If, however, these parametersare not sufficiently known, the mathematicalmodel that is used would only involve threeunknowns which would be determined fromcontrol points in the object space. It is interesting to note, therefore, that the use of amirror reduces the number of unknowns tothree in place of six where the camera ismoved to take the second photograph. Another remark worth pointing out is that complete determination of the object space ispossible without need for control if the mirrorposition relative to the camera axis is known.
Up until now, the discussion has beenlimited to cases of pairs of photographs, oneof the object itself and the other of its mirrorreflection. There is nothing to limit us, however, to this particular configuration. It isquite possible to consider pairs composed ofphotographs of two different mirror-reflections of the same object. One such configuration is shown in Figure S.
The pyramid defg is placed in front of amirror M l which makes an angle (JI with theaxis of the camera C. Its mirror-reflectiondled,gl is then photographed by C. Next, themirror is rotated to position NI2, changing (JI
to (J2, and the mirror-reflection d2e2f2g2 isphotographed on a different plate. The twoplates thus obtained contain sufficient information for spatial determination of theobject.
The first operation necessary is to apply thereflection transformation of Eq uation 1 to thecoordinates measured on the two negativeplates. The new coordinates would be equivalent to those obtained if we were able toplace the camera at Cl and C2 and photograph the pyramid itself. Hence, the positionsof Cl and C2 as well as the orientation of thecoordinate axes systems associated with themare required.
From Figure S, it is easily seen that thecoordinates of Cl are
XCI = 25, cos 11.
r CI = 251 sin 11. (9)
Zc, = 0
where 51 is the distance between C and NIL.The coordinates for C2 are obtained in the
FIe. 5. Jmages of two mirror reflections forming a stereopa Ir.
same manner replacing 5, and (Jl in Equation9 by 52 and (J2, respectively, where .52 is ~he
distance between C and i\!h The onentatlOnof the X,Y,Z,- (or X 2 Y2Z 2-) system with respect to the X YZ-system is obtained byrotating the latter about Z by an angle 2(}, (or2(}2) taking X toward Y.
Figure S represented the c~se when .themirror was rotated about an aXIs perpendiCUlar to the horizontal plane containing thecamera axis. The more general case wouldarise when the axis of rotation of the mirror isinclined to the said horizontal plane. In thissituation, the total rotation angle would havetwo components thus simulating the ~eneral
case discussed in Case D above but With twomirror reflections.
A progressively more complex situationwould be encountered if more than one planemirror, say two, are used. Here, one persp.ective view is obtained from a mirror-reflectIOnfrom the first mirror. Then, the second perspective view is obtained when the first mirroris rotated such that the reflection from thesecond mirror (which may be fixed in the object space) is reflected again ~)y ~he ~rst
mirror and photographed. ThiS SItuatIOn,though quite complex, may become necess~ry
when an increase in effective base separatIOnis required as will be discussed later.
ApPLICATIONS
Vile have, thus far, discussed the basicgeometric concepts of mirror photogrammetry and corresponding procedures for analytical reduction. To illustrate the l~seful
ness of these concepts we will attempt 111 thefollowing paragraphs to discuss some applications.
CLOSE-RANGE PHOTOGRAMM ETRY
The author's first encounter with the sub-

1076 PHOTOGRAMMETRIC E GINEERING
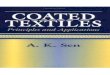
tem is composed of three components: avidicon tube representing the negative plane,a lens, and a plane mirror. The distance between the lens and the vidicon tube is equalto the principal distance of 25 millimeters.There are 25 reseau points on the surface ofthe vidicon used to relate the photographsobtained to the camera coordinate system.The optical axis of the camera is defined asthe line connecting the center reseau point tothe center of the plane mirror and passingthrough the optical center of the mirror. Thisline is assumed to be fixed in space and makesa constan tangle'}' wi th the local zeni th vertical.
The plane of the mirror is inclined to thesurface of the vidicon tube by a variable anglem (Figure 6). For any given value of m thereflection of the optical axis makes a constantangle m' with the vidicon tube for all azimuthal positions of the mirror. The value ofm' is obtained from m by the simple relation
This angle m' is referred to in the missiondata as the elevation angle. It has a value ofzero when the reflected optical axis is parallelto the vidicon plane. The elevation angle istaken as positive if it is upward from the zeroposition, and negative when downward.
The azimuth angle of the mirror (3 is measured about the fixed optical axis. The planeof zero azimuth contains the optical axis andintersects the lunar horizontal at 89.6±O.4degrees east of lunar north (Figure 7). Positive azimuths are taken counterclockwise, asviewed from above, from the zero to a stoplocated at +132 degrees. Negative azimuthsincrease clockwise from zero to a stop at -222degrees (total of 354 degrees).
Stereo Coverage. Although there is only onecamera whose lens is fixed with respect to theobject space, the rotation of the mirror inazimuth and elevation enables the attainingof varying perspective views. The existence ofthe stereo-effect. at least theoretically, between two exposures is illustrated in Figure 6.The front view shows the projection on thevertical plane through the inclined opticalaxis (i.e., the plane containing '}'). The mirroris inclined at an angle m to the vidicon, andthe corresponding angle m', which the reflected optical axis makes with the vidicon, isalso shown. The angle (j is that angle whichthe reflected axis makes with the lunar horizontal plane. For a given value of m, it is important to note that while m' remains constant, (j varies according to the mirror azimuth. I t lies between the limits
ject was during a research project concernedwith the application of photogrammetry todentistry (Reference 4). The use of planemirrors in that project suggested itself, not somuch for the purpose of obtaining stereocoverage, but to overcome the serious problem of blind spots when photographingdental casts. By blind spots is meant hiddenareas which cannot adequately be registeredin both photographs. In these circumstancesthe dental cast to be photographed was surrounded by as many as three high qualityfront-surfaced mirrors. One photograph wastaken on which appeared one parent and threesatellite images of the dental cast. Thenthe camera was displaced by an amount representing the base (which must be carefullycomputed taking account of the position ofthe mirrors) and another photograph was exposed. Consequently, from one pair of exposed plates it was possible to obtain as manyas four stereomodels. The only factor to becarefully observed is that the satellite imagesare photographic records of mirror reflectionsof the cast and hence are left-right reversed.
It is obvious that the mirror technique discussed above need not be restricted to applications in dentistry. As a matter of fact,any application in the field of close-rangephotogrammetry could easily make use ofthis technique. Such use may prove advantageous when problems of blind spots arise orwhen it is more economical to register morethan one image on the same negative.
EXTRATERRESTRIAL MAPPING FROM SOFT
LAI DED VEHICLES
Another, and most interesting, field of application for the principles of mirror photogrammetry is large scale mapping fromphotographs acquired by soft-landed vehicleson moons and planets. The accent in our discussion will be placed on mapping the lunarsurface, although the techniques can easily beapplied to other planetary surfaces.
By virtue of the fact that the landed vehicleis normally stationary, the photographic system aboard the vehicle utilizes mirrors which,while rotating, makes possible the scanning ofthe surface surrounding the vehicle. In thefollowing sections we will discuss the elementsof the photographic system and the meansfor reducing the resulting photographic records. This discussion will center on theSurveyor I mission because of the writer'sexperience with it while acting as a consultantto the U. S. Army Map Service (see Reference5).
The Photographic System. The camera sys-
m' = 90° - 2m. (10)

PRINCIPLES AND APPLICATIONS OF A.TALYTICAL MIRROR PHOTOGRAMMETRY 1077
OF lENS
Of V I 0 I C ON
MIRROR IMAGE
r
4j
MIRROR IMAGE OF
I~
~~ /M"'O'FRONT V lEW
FIG. 6. Demonstration of stereo coverage in the lunar Surveyor! mission. The lower portion of thedrawing represents the auxiliary projection on the plane of the videcon.
(m' - or) ~ () ~ (m' + or) (11)
Also shown in the front view are the followingdistances:
h is the height of the mirror center abovethe lunar horizontal plane.
f is the principal distance. or the distancebetween the lens and the vidicon.
L is the distance between the lens and mirror cen tel' measured along optical axis.
The mirror is so positioned (both in elevation and azimuth) that an area of detail onthe lunar surface is reflected by the mirror, thereflected rays pass through the lens, andthe image formed on vidicon is scanned frombeneath and transmitted to the earth. It isevident from the front view that the picturereceived is equivalent to a photograph takenfrom a position in space coi nciden t wi th themirror reflection of the lens (Figure 6).
To demonstrate the existence of stereocoverage, an auxiliary projection on the planeof the vidicon is also shown in Figure 6.There, a trapezoidal area of coverage is shownfor the first position of the mirror. Next, the
mirror is rotated in azimuth (at the sameelevation angle) about the optical axis by anangle {3. The new trapezoid of coverage isshown to overlap the first by a shaded areadesignated the model area. Also shown in theauxiliary projection is the effective base brepresen ting the distance between the twoposi tions of the mirror-reflections of the lens.Thus, at least theoretically, the use of themirror affords two different perspective views,hence stereo-coverage.
A nalytical Reduction. So far we haveestablished the existence of stereoscopiccoverage between pairs of photographs. Eachpair will yield a stereo-model of the lunarterrain when both interior and exterior orientation of each camera have been regained.In conventional applications of photogrammetry (whether analog or analytical) thecorrect positioning and orientation of astereo model with respect to the object spaceinevitably requires the use of control points.It must be obvious that in the presen t si tuation there is no known control on the lunarsurface for absolute orientation purposes.Consequently, in order to obtain information

1078 PHOTOGRAMMETRIC ENGINEERING
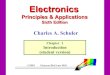
FIG. 7. Geometric elements of mirror photographsobtained during the lunar Surveyor I mission.
that has true terrain significance, other meansof deriving the elements of absolute orientation must be found. I n the following sectionsit will be shown that this is possible.
Coordinate Axes. Figure 7 shows the complete geometry of one photograph, includingthe relationship between the lunar andphotographic systems. The vertical planecontaining the optical axis intersects the lunarhorizontal 37.1 fOA degrees east of lunarnorth. The control Y-axis is chosen to coincide with the trace of that vertical plane onthe lunar horizon tal. The origi n of the con trolsystem is the point of intersection of the extended optical axis and the lunar horizontal.The Z-axis is taken as positive upwaI-d andthe X-axis is fixed to form a right-handed coordinate system.
The photo-coordinate system associatedwith a photograph in the positive position isalso shown in Figure 7. The square pattern ofthe reseau dots on the vidicon is orien ted suchthat one direction makes an angle of +12degrees from the zero azimuth direction. Thisdirection is taken to represent the positive ydirection. The photo z-axis is taken as positive along the reflected optical axis upward,and the x-axis is fixed to form a right-handedsystem at the virtual posi tion of the photograph, as shown in Figure 7.
Orientation :Matrix of a Given Photograph.For every photograph, the elevation angle m'
11"1("0"0'''''11''' _
/ ..,,".."-1lUNAR \'
fASl ~
.. 0°11.0" '0 ''' ..... "OHIO
\"'10' ,. "U"U'"
and the azimuth of the mirror are given.Knowing also the angle 'Y, the orientationmatrix relating the two coordinate systemsX YZ and xyz, as defined above, can be readilyderived by a set of four sequential rotations.N ext, as the relationship between the arbitrary system XYZ and the lunar EastNorth system is known (see Figure 7) theabsolute orientation matrix of each photograph can be easily computed.
Coordinates of Photographic Exposure Station. Given the distance Land h (see Figure6), the coordinates of the exposure station(i.e., the mirror image of the lens) with respect to the X YZ-system may be computedfor every given pair of elevation and azimuthangles. These coordinates can in turn betransformed to corresponding absolute valueswith respect to the lunar East-North system.Hence, the absolute position of each virtualexposure station can be computed fromknown parameters of the photographic system.
It has been shown in the preceding sectionsthat for the photographic system utilizingmirrors, it is possible to derive both the position and orientation of each photograph without the need for any control in the objectspace. This unique possibility is rather fortunate in lunar and planetary applicationsbecause of the absence of otherwise necessarycon trol poi n ts.
In essence, we have demonstrated that alltwelve elements of exterior orientation of astereo-pair can be computed beforehand fromthe parameters of the photographic system.With these known, the question of determining spatial positions of object points is rathersimple. For a detailed discussion of the various analytical schemes used, the results obtained, and error propagation consideration,the reader is referred to Reference 5.
REFERENCES AND BIBLIOGRAPHY
(1) Mikhail, E. M., "Analytical Mirror Photogrammetry," paper presented at the 1967Symposium on Computational Photogrammetry, American Society of Photogrammetry,Dec. 4-8, 1967, Gaithersburg, Md., U.S.A.
(2) Gruner, H., "New Aspects of Mono-Photogrammetry," PHOTOGRAMMETRIC ENGINEERING, Vol. 21,1955.
(3) Misken, E. A., "The Application of Photogrammetric Techniques to Medical Problems,"Photogrammetric Record, Vol. 2, 1956.
(4) Mikhail, E. M., Homick, E., and Roger, R.,"Application of Photogrammetry to Dentistry," Surveying and Mapping Department,School of Civil Engineering, Purdue University, Lafayette, Indiana, U.S.A., Nov. 1966.
(5) "Analytical Reduction of Surveyor I Photography," Technicat Report, U. S. Army MapService, Washington, D. c., U.S.A., Sept. 1967.