Embed Size (px)
Citation preview

“DESIGN OF ACTIVE MAGNETIC BEARING”
Presented ByJADHAV
MANORANJAN A.Guided By
Prof . S. B. BELKAR
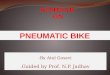
Introduction
MagnetismMagnetic field
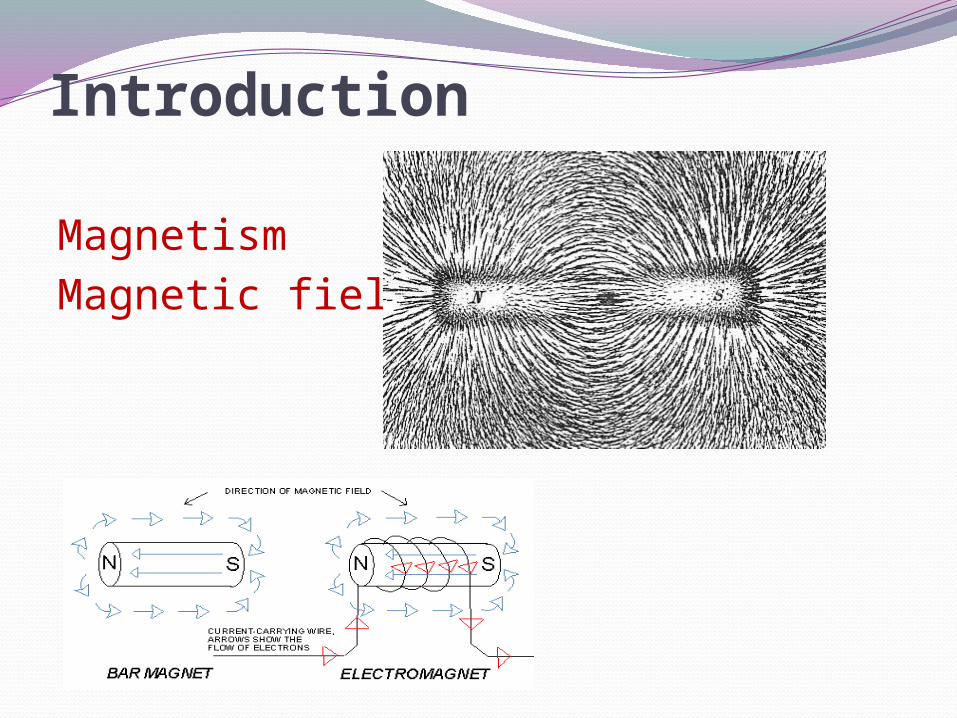
Magnetism Magnetic Flux Density
B = magnetic flux densitym = magnetic permeability
H = magnetic field
HB
r 0m0 = permeability of free
spacemr = relative permeability
1
1
diamagnetic
paramagnetic
ferromagnetic
r
niH
2
multiple loops of wire, n
1
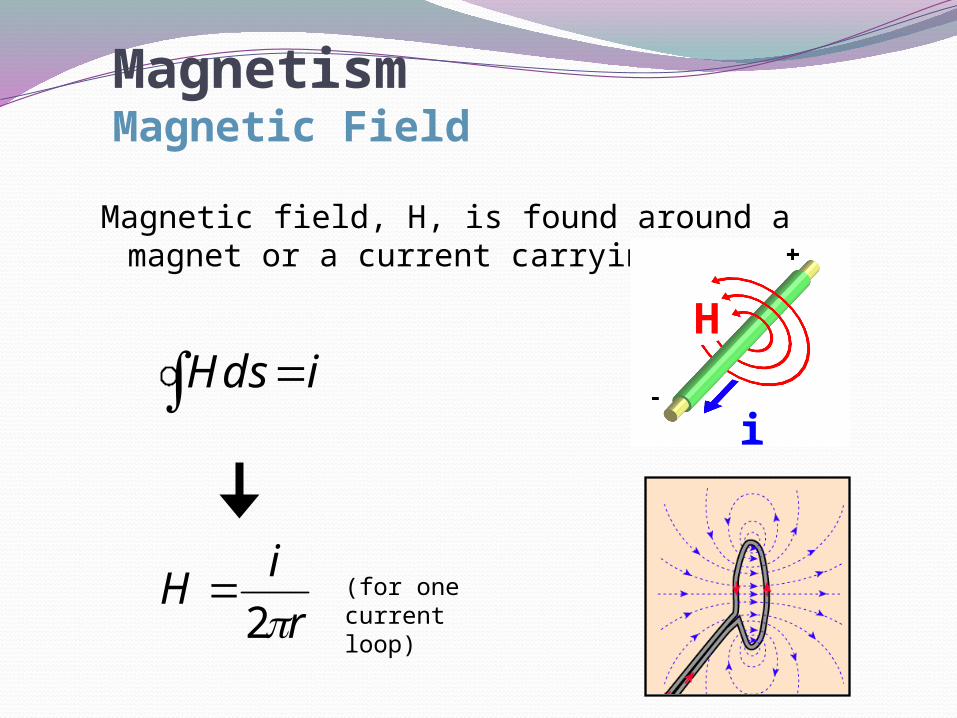
Magnetism Magnetic Field
Magnetic field, H, is found around a magnet or a current carrying body.
r
iH
2
idsH
(for one current loop)
H
i
Magnetism Lorentz Force
f = forceQ = electric chargeE = electric fieldV = velocity of charge
QB = magnetic flux
density
BvEQf
Magnetism Lorentz Force
Simplification:
BvQf
Source: MIT Physics Dept.
website
BvEQf
BvE
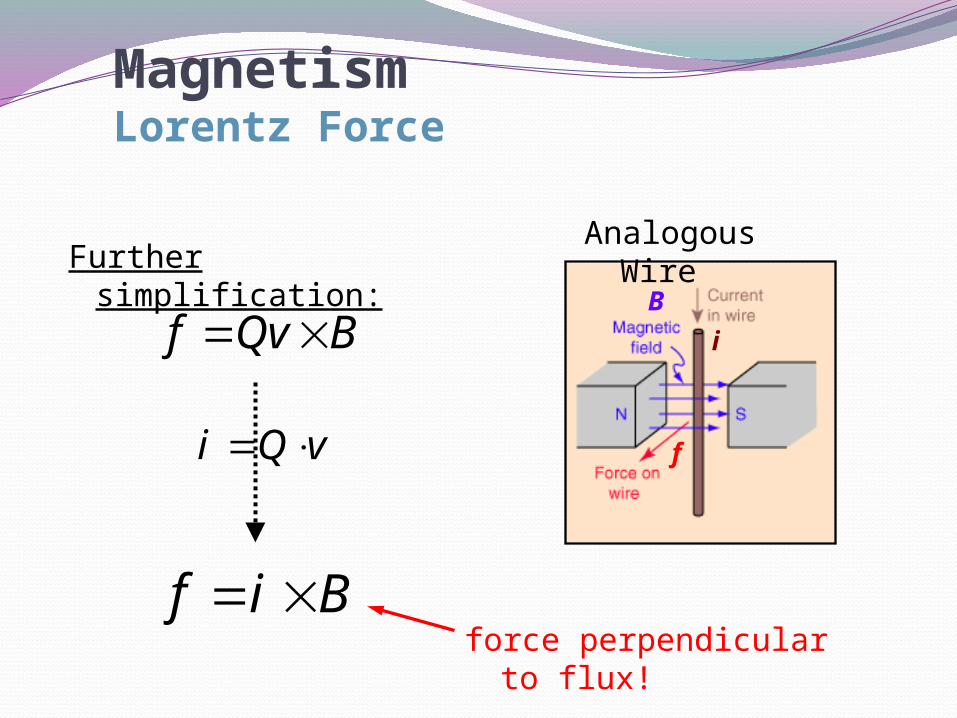
Magnetism Lorentz Force
Further simplification:
Bif
BvQf
vQi
force perpendicular to flux!
f
i
B
Analogous Wire
MAGNETIC BEARINGBearing which supports a load using magnetic levitation
Advantages of magnetic bearings: contact-free no lubricant (no) maintenance tolerable against heat, cold, vacuum, chemicals low losses very high rotational speeds
Disadvantages: complexity high initial cost
MAGNETIC BEARING TYPESPASSIVE MAGNETIC BEARING Not electrically controlled, Permanent magnets
ACTIVE MAGNETIC BEARING Electrically controlled, Electromagnets
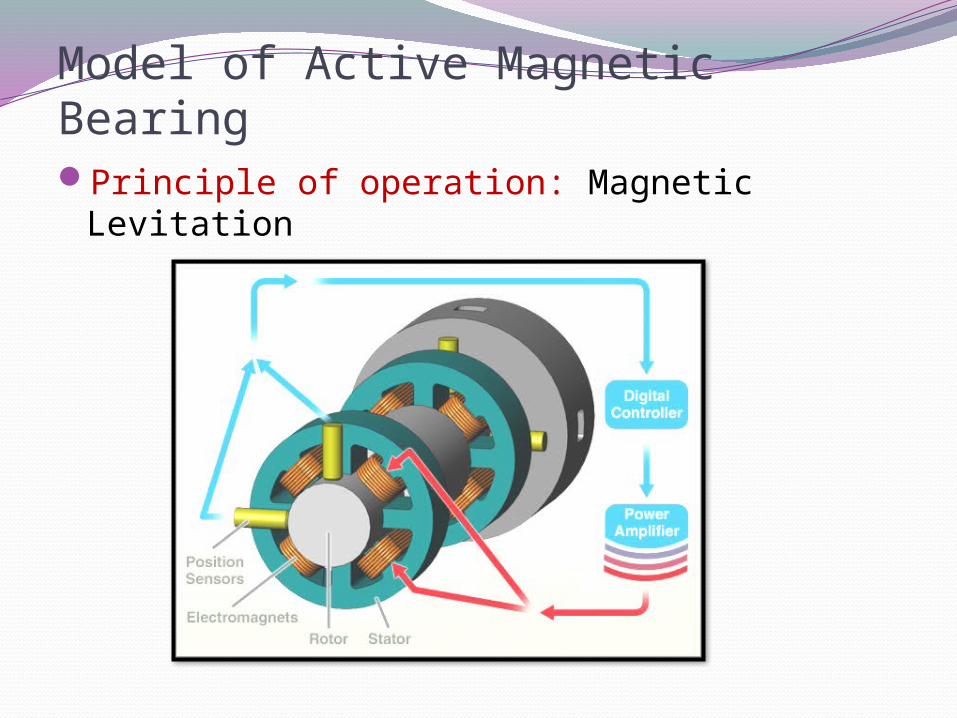
Principle of operation: Magnetic Levitation
Model of Active Magnetic Bearing
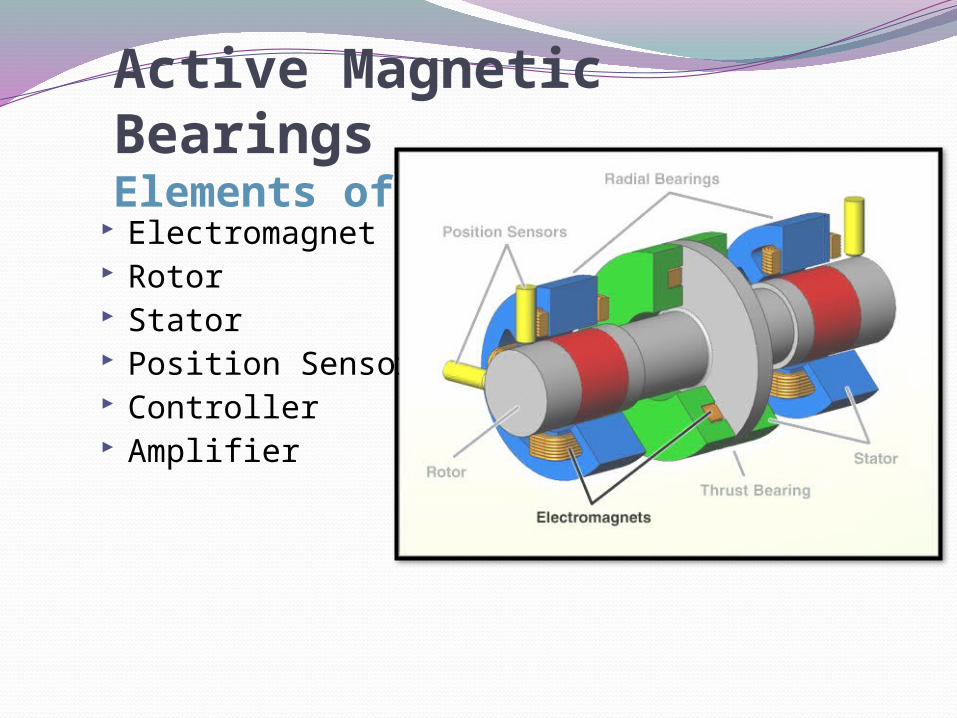
Active Magnetic Bearings Elements of System
Electromagnet Rotor Stator Position Sensor Controller Amplifier
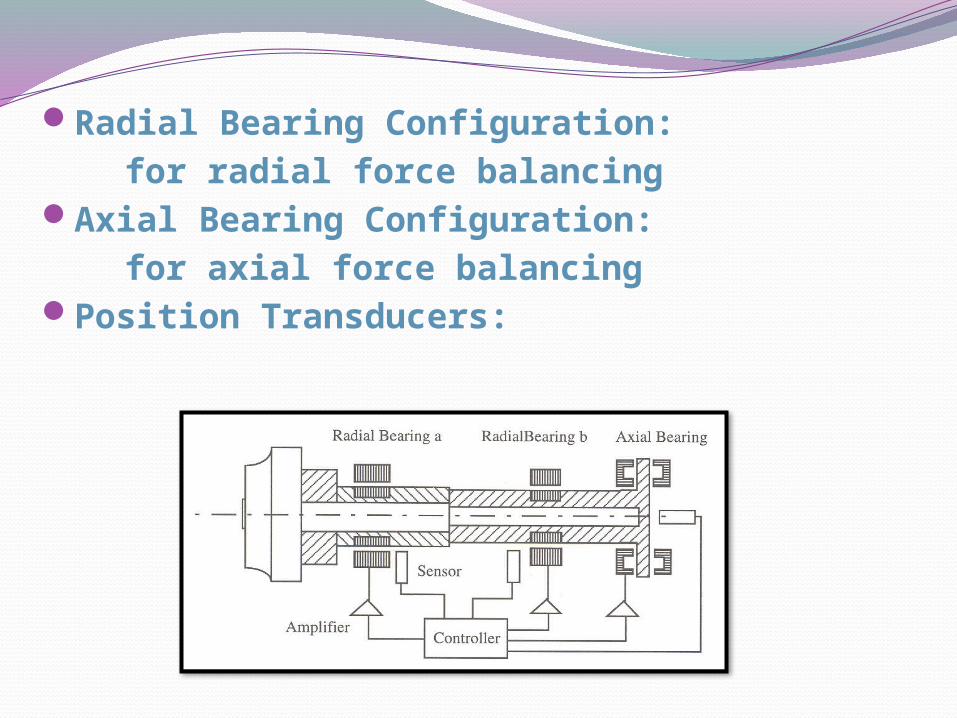
Radial Bearing Configuration: for radial force balancingAxial Bearing Configuration: for axial force balancingPosition Transducers:
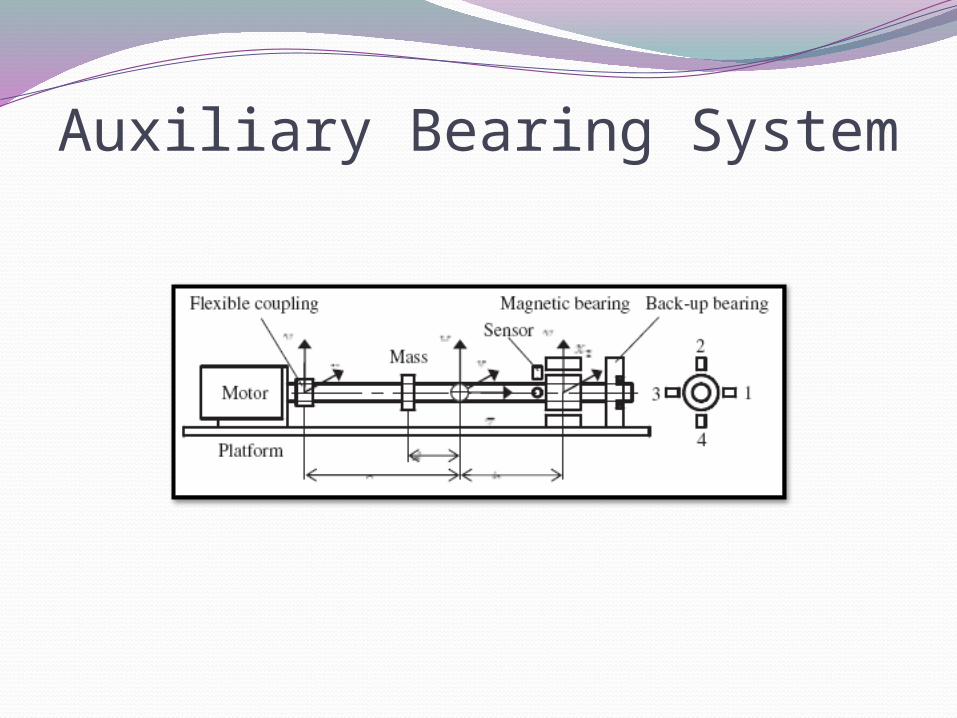
Auxiliary Bearing System
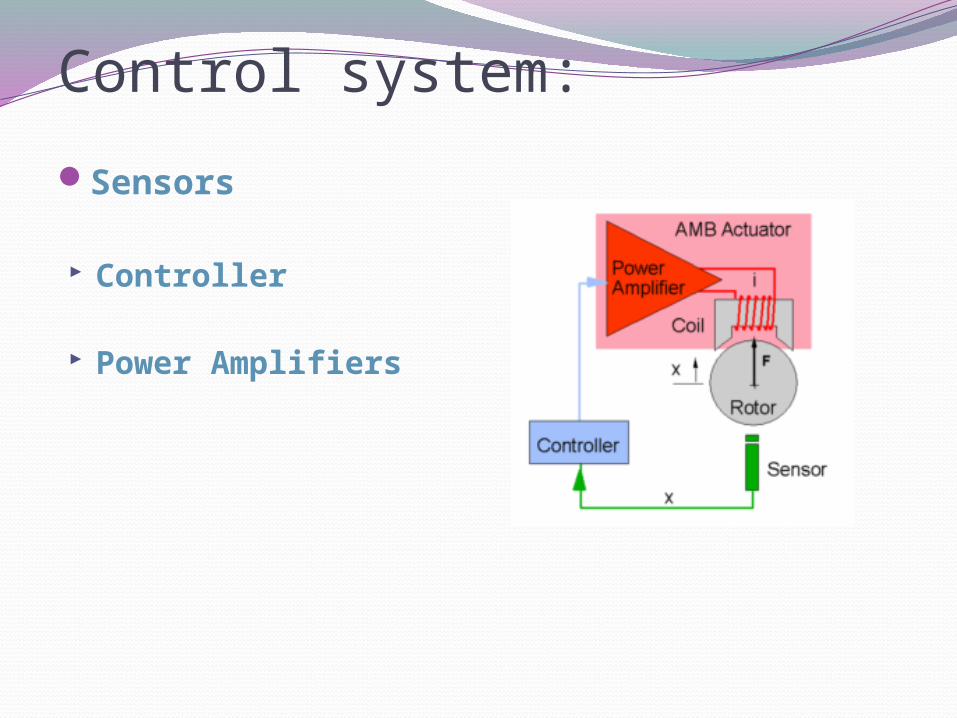
Sensors
Controller
Power Amplifiers
Control system:
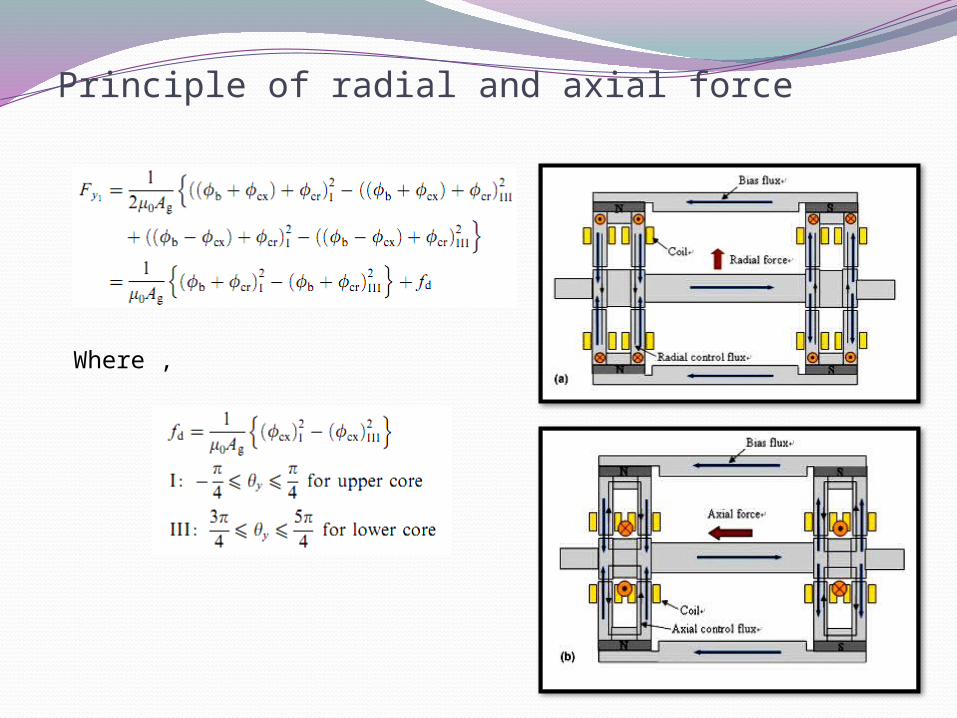
Principle of radial and axial force
Where ,
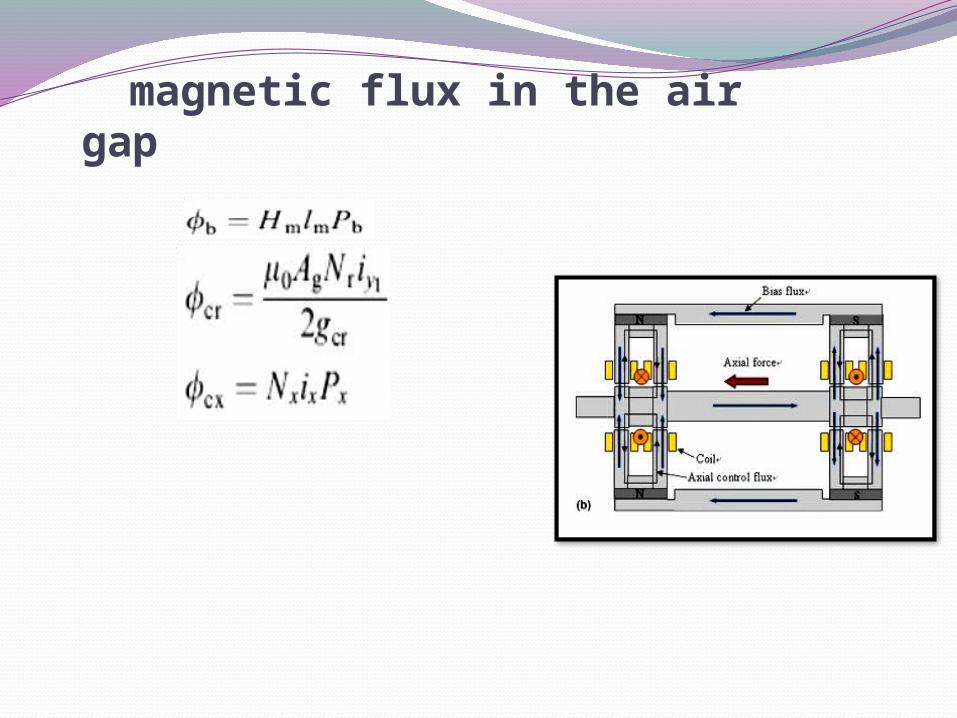
magnetic flux in the air gap
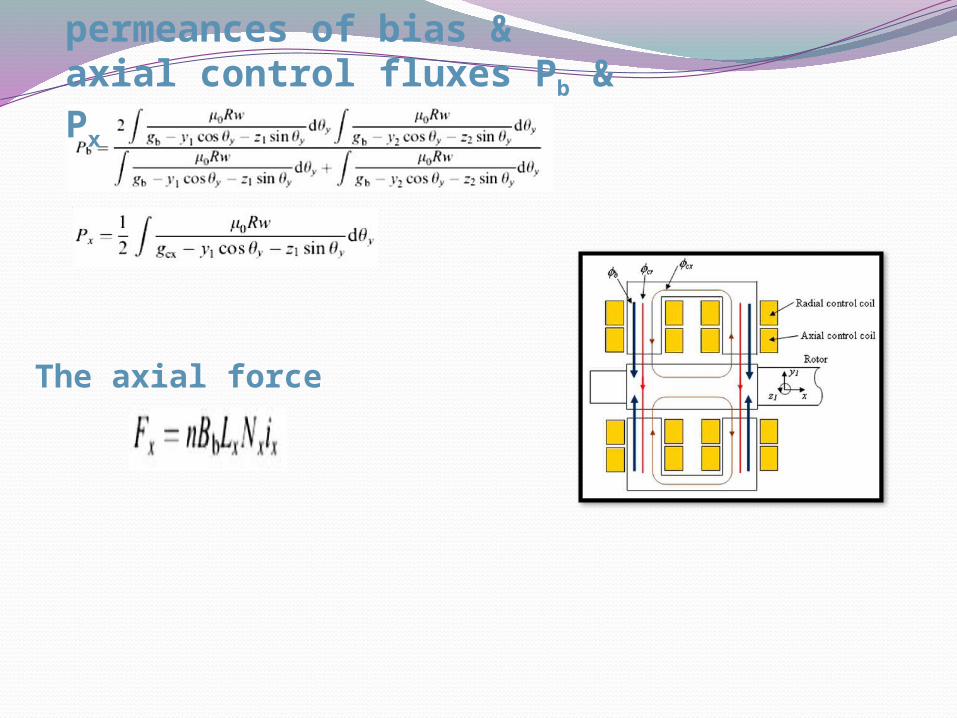
The axial force
permeances of bias & axial control fluxes Pb & Px
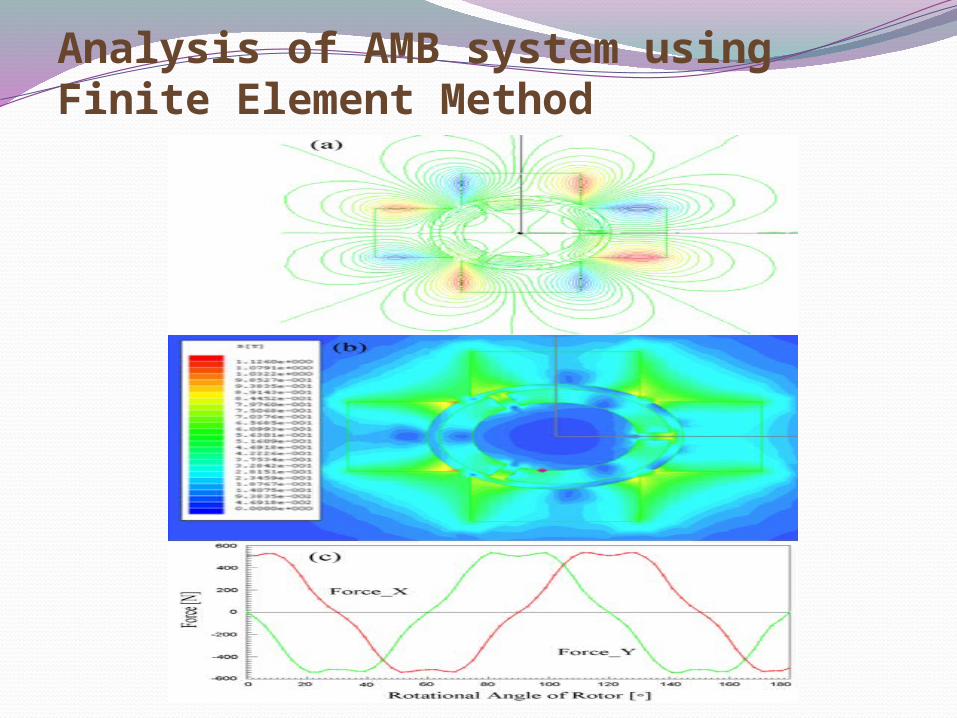
Analysis of AMB system using Finite Element Method
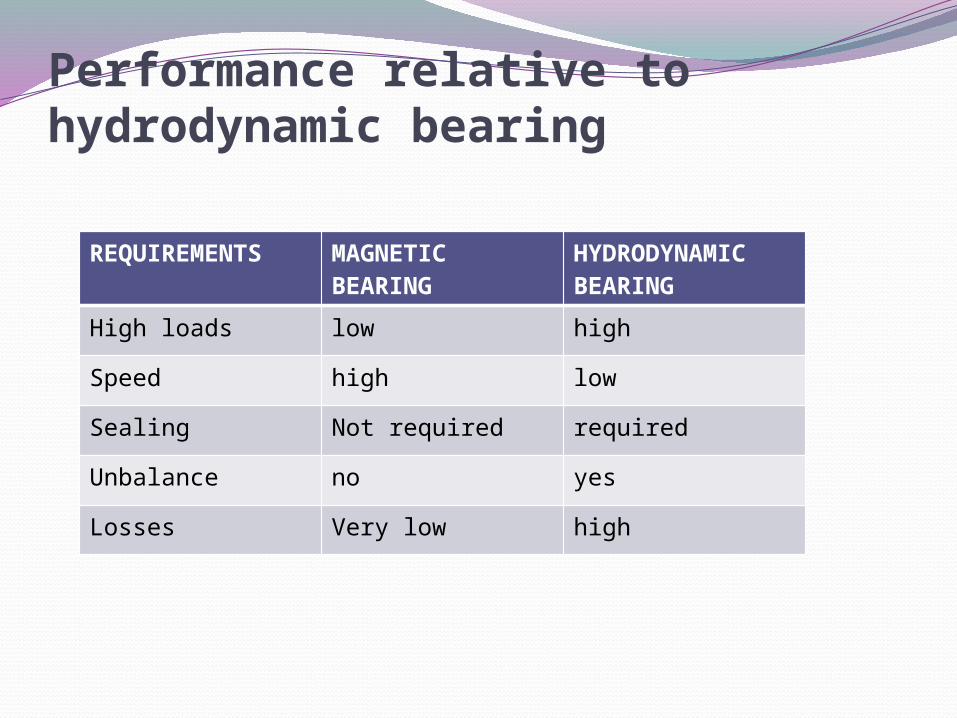
Performance relative to hydrodynamic bearing
REQUIREMENTS
MAGNETIC BEARING
HYDRODYNAMIC BEARING
High loads low high
Speed high low
Sealing Not required required
Unbalance no yes
Losses Very low high
ADVANTAGES OF AMB
•NON CONTACT MOTION
•HIGH ROTATING SPEED
•NO LUBRICATION
•INCREASE IN OPERATING TEMPERATURE
RANGE
•ACTIVE NATURE
DISADVANTAGES OF AMB
•NO LINEARITY
•ROTOR HEATING
•LARGER SIZE
•HIGH COST
APPLICATIONS OF AMB
•Image display unit
•High precision lathe
•Turbo expander
•Turbo compressor
•High speed milling
•Machine tool spindle
•Maglev Trains
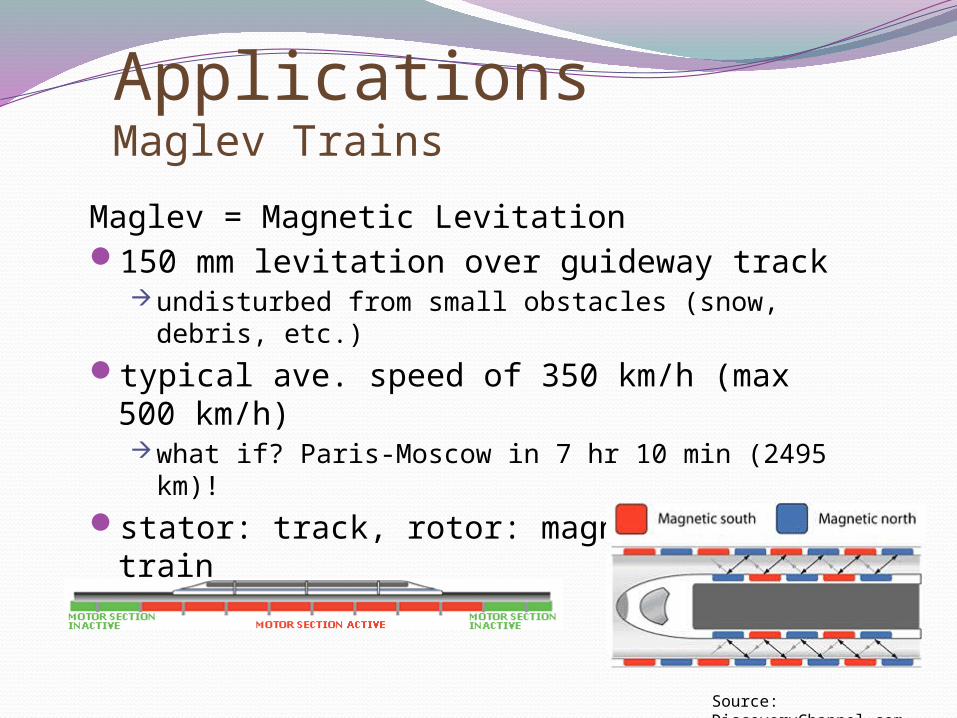
Applications Maglev Trains
Maglev = Magnetic Levitation150 mm levitation over guideway track
undisturbed from small obstacles (snow, debris, etc.)
typical ave. speed of 350 km/h (max 500 km/h)what if? Paris-Moscow in 7 hr 10 min (2495 km)!
stator: track, rotor: magnets on train
Source: DiscoveryChannel.com
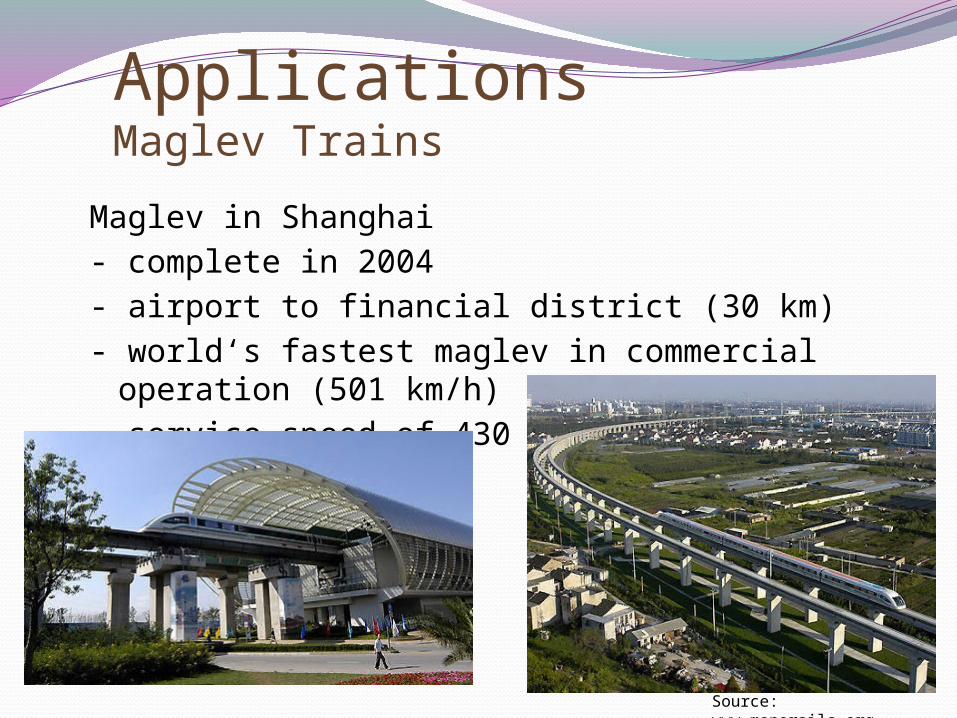
Applications Maglev Trains
Maglev in Shanghai- complete in 2004- airport to financial district (30 km)- world‘s fastest maglev in commercial operation
(501 km/h)- service speed of 430 km/h
Source: www.monorails.org
THANK YOU














![Statistical Methods [Jadhav]](https://img.pdfslide.us/doc/110x75/577d20151a28ab4e1e91f270/statistical-methods-jadhav.jpg)