-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
1/31
Suivantr!c!d"nt
RoSe, March 14, 2014
Solving the forward kinematics ofparallel robots, a review
ofavailable methodsMemorial University of Newfounland
Solving the forward kinematics ofparallel robots, a review
ofavailable methodsMemorial University of Newfounland
# "$orial % niv"r&ity
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
2/31
Suivantr!c!d"nt
IntroductionKinematics formulationForward Kinematics roblem
Solving the system!esults and "nalysisSummary
IntroductionKinematics formulationForward Kinematics roblem
Solving the system!esults and "nalysisSummary
Outline
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
3/31
Suivantr!c!d"nt
#he truly parallel manipulator' (ou)h *latfor$ +St",art
*latfor$-
' on" fi "d a&"' on" $o il" *lat"for$' 6 in"$atic&
chain&ach in"$atic& chain' ,ith on" *ri&$atic actuator'
throu)h univ"r&al or all oint&
#he truly parallel manipulator' (ou)h *latfor$ +St",art
*latfor$-
' on" fi "d a&"' on" $o il" *lat"for$' 6 in"$atic&
chain&ach in"$atic& chain' ,ith on" *ri&$atic actuator'
throu)h univ"r&al or all oint&
Introduction
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
4/31
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
5/31
Suivantr!c!d"nt
Inverse kinematics problem
: (iv"n th" )"n"rali "d coordinat"& of th" $ani*ulator
"nd'"ff"ctor 7 find th" oint *o&ition& L.
*licit &olution.R"al &olution 9 2
Inverse kinematics problem
: (iv"n th" )"n"rali "d coordinat"& of th" $ani*ulator
"nd'
"ff"ctor 7 find th" oint *o&ition& L.
*licit &olution.R"al &olution 9 2
Introduction
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
6/31
Suivantr!c!d"nt
Forward kinematics problem
: (iv"n th" oint *o&ition& L find th" )"n"rali "d
coordinat"&7 of th" $ani*ulator "nd'"ff"ctor.
a difficult *ro l"$ +Roth-Proven:40 co$*l" &olution& +La
ard-R"al &olution 9 ; co$*l" 9
Forward kinematics problem
: (iv"n th" oint *o&ition& L find th" )"n"rali "d
coordinat"&
7 of th" $ani*ulator "nd'"ff"ctor.
a difficult *ro l"$ +Roth-Proven:40 co$*l" &olution& +La
ard-R"al &olution 9 ; co$*l" 9
Introduction
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
7/31Suivantr!c!d"nt
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
8/31Suivantr!c!d"nt
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
9/31Suivantr!c!d"nt
Position based equationsin" varia l"& : = th" fir&t 3 $o
il" *latfor$ oint& = A 1 y1 1 2 y2 2 3 y3 3B
ro$ th" CD4 F>5 and F>6 ar" ,ritt"n in
t"r$& of varia l"&
= or$ "t,""n Ei and >i
KinematicsFormulation
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
10/31Suivantr!c!d"nt
Displacement based equations
#od"l&
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
11/31Suivantr!c!d"nt
Position based equations
#od"l&thr"" *oint $od"l ,ith *latfor$
di$"n&ional con&traint&thr"" *oint $od"l ,ith
*latfor$con&traint& ,ith *ointin) a i&
th" thr"" *oint $od"l ,ith con&traint&and function r"co$
ination
th" &i *oint $od"l
Forwards Kinematics
Problem
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
12/31Suivantr!c!d"nt
Transformation into anoptimization problem
or o*ti$i ation t"chniqu"& Hn" o "ctiv" function
"riv"d fro$ th" CD L"t l )i " th" l") l"n)th of
in"$atic& chain i +in*ut ofth" *ro l"$-.
au)$"nt"d y on" con&traint &"t : th" *latfor$ fi "d
di&tanc"& "t,""n th" thr""&"l"ct"d oint *oint& :
>1I>2and >3 di&tinct *oint&
,h"r"
,h"r"
# iddl" a&t
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
13/31Suivantr!c!d"nt
Numeric Methods
S"cant #"thod 'J on" &olution
",ton $"thod 'J on" &olution
Fontinuation $"thod ,ithho$otho*y 'J &"v"ral
&olution&
yallitic li$ination 'J &"v"ral&olution&
Cnt"rval analy&i& 'J all &olution& orno
an&,"r +c"rtifi"d-
("o$"tric Ct"rativ" #"thod 'J on"&olution
Solving the system
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
14/31Suivantr!c!d"nt
Algebraic Methods
yallitic li$ination 'J
&"v"ral&olution&R"&ultant& $"thod 'J
&"v"ral&olution&(ro" n"r a&"& 'J all "
act&olution& +c"rtifi"d-
Solving the system
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
15/31Suivantr!c!d"nt
Optimization Techniques
("n"tic El)orith$ 'J &"v"ral&olution&
Si$ulat"d Enn"alin) 'J &o$"&olution&
Ky rid ("n"tic El)orith$ andSi$ulat"d Enn"alin) 'J all
&olution&(3' F7 'J all &olution&
Solving the system
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
16/31Suivantr!c!d"nt
Newton%s Method' " hav" on" &olution
' i"udonn" in 1?M2
&bservations ' Nuadratic conv"r)"nc"' S$all co$*utation
ti$"&' #ay not conv"r)"' Oaco ian inv"r&ion' u$"ric
in&ta iliti"&'(ample' P"ry fa&t $"thod for control' on
&in)ularity fr"" SS#: 5Q failur"&
' ""d& conv"r)"nc" t"&t a& th" Dantorovich
th"or"$
Newton%s Method' " hav" on" &olution
' i"udonn" in 1?M2
&bservations ' Nuadratic conv"r)"nc"' S$all co$*utation
ti$"&' #ay not conv"r)"' Oaco ian inv"r&ion' u$"ric
in&ta iliti"&'(ample' P"ry fa&t $"thod for control' on
&in)ularity fr"" SS#: 5Q failur"&' ""d& conv"r)"nc"
t"&t a& th" Dantorovich th"or"$
Solving Methods
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
17/31Suivantr!c!d"nt
Interval "nalysis' Ell &olution&
' #"rl"t in 2005
&bservations ' Nuadratic conv"r)"nc"' Lon) co$*utation
ti$"&' #ay not conv"r)"' Oaco ian inv"r&ion' Eccount&
for i$*r"ci&ion'(ample' ""d& ",ton & $"thod' Hn
&in)ularity fr"" SS#: 5Q failur"&
' ""d& "nclo&ur" t"&t a& ,ith th" Dantorovich
th"or"$
Interval "nalysis' Ell &olution&
' #"rl"t in 2005
&bservations ' Nuadratic conv"r)"nc"' Lon) co$*utation
ti$"&' #ay not conv"r)"' Oaco ian inv"r&ion' Eccount&
for i$*r"ci&ion'(ample' ""d& ",ton & $"thod' Hn
&in)ularity fr"" SS#: 5Q failur"&' ""d& "nclo&ur"
t"&t a& ,ith th" Dantorovich th"or"$
Solving Methods
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
18/31Suivantr!c!d"nt
$ontinuation method with homothopy
' Ra)havan in 1??3
' " hav" &olution& for a &i$*l" "quation
&y&t"$ +7- 0' " ,i&h &olution& for &i$ilar
(+7- 0' Fontinuation: K+7 - (+7-T + +7-U(+7--' A0 V
1B&bservations ' #ay $i&& &olution&
' #ay add &olution&' Fro&&in) &olution&'
""d& it"rativ" $"thod'(ample' ro l"$ )oin) fro$ th" SS# to th"
6'6
$ontinuation method with homothopy' Ra)havan in 1??3
' " hav" &olution& for a &i$*l" "quation
&y&t"$ +7- 0' " ,i&h &olution& for &i$ilar
(+7- 0' Fontinuation: K+7 - (+7-T + +7-U(+7--' A0 V
1B&bservations ' #ay $i&& &olution&
' #ay add &olution&' Fro&&in) &olution&'
""d& it"rativ" $"thod'(ample' ro l"$ )oin) fro$ th" SS# to th"
6'6
Solving Methods
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
19/31Suivantr!c!d"nt
)yallitic 'limination * Numeric
' C&olation to a univariat" "quation
' Ku&ty in 1??4&bservations' "rha*& all
&olution&' Fo$*l" &olution& $ay "co$" r"al
&olution&' S*uriou& &olution& ar" add"d'(ample'
Si$*l"r *arall"l ro ot&: HD' ro l"$: 40 &olution& for
th" SS#
)yallitic 'limination * Numeric
' C&olation to a univariat" "quation
' Ku&ty in 1??4&bservations' "rha*& all
&olution&' Fo$*l" &olution& $ay "co$" r"al
&olution&' S*uriou& &olution& ar" add"d
'(ample' Si$*l"r *arall"l ro ot&: HD' ro l"$: 40
&olution& for th" SS#
Solving Methods
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
20/31Suivantr!c!d"nt
!esultants * "lgebraic
' C&olation to a univariat" "quation
' Ku&ty in 1??4&bservations' "rha*& all
&olution&' S*uriou& &olution& ar" add"d'
R"quir"& "li$ination &t"* ,ith CD'(ample' Si$*l"r *arall"l
ro ot&: HD' ro l"$: 40 &olution& for th" SS#
!esultants * "lgebraic
' C&olation to a univariat" "quation
' Ku&ty in 1??4&bservations' "rha*& all
&olution&' S*uriou& &olution& ar" add"d'
R"quir"& "li$ination &t"* ,ith CD
'(ample' Si$*l"r *arall"l ro ot&: HD' ro l"$: 40
&olution& for th" SS#
Solving Methods
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
21/31Suivantr!c!d"nt
!esultants * "lgebraic
' Solvin) for R"&+f ) 1- 0 "quival"nt to d"t+#- 0
' Cn c"rtain in&tanc"& th" h"ad t"r$& of th"
*olyno$ial& canc"lW th" canc"llation of th" d"t"r$inant
W it add& on" " tran"ou& root.
'
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
22/31Suivantr!c!d"nt
+roebner ases * "lgebraic
' calculation of (ro" n"r a&i&: canonical for$ of
id"al
' conv"r&ion to a Rational %niv"ariat" R"*r"&"ntation'
La ard au)"r" and Rouilli"r in 1??6 = 2000 *"riod&bservations'
Ell " act &olution&
' Rational or int")"r co"ffici"nt&' R"quir"& &olvin)
th" %nivariat" "quation'(ample' 36 &olution& for th" SS#'
6'6 co$*utation ti$"&: 1 $in in #a*l"
+roebner ases * "lgebraic
' calculation of (ro" n"r a&i&: canonical for$ of
id"al
' conv"r&ion to a Rational %niv"ariat"
R"*r"&"ntation
' La ard au)"r" and Rouilli"r in 1??6 = 2000
*"riod&bservations' Ell " act &olution&' Rational or
int")"r co"ffici"nt&' R"quir"& &olvin) th" %nivariat"
"quation'(ample' 36 &olution& for th" SS#' 6'6 co$*utation
ti$"&: 1 $in in #a*l"
Solving Methods
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
23/31Suivantr!c!d"nt
+enetic "lgorithms' " hav" on" &olution
' >oudr"au in 1??6
&bservations ' K"uri&tic co$*utation ti$"&' #ay not
conv"r)"' #od"lin) i&&u"' Startin) &olution
d"*"ndant'(ample' #ay find $any &olution&throu)h r"*"at"d
trial&' S$all"r ro ot&
+enetic "lgorithms' " hav" on" &olution
' >oudr"au in 1??6
&bservations ' K"uri&tic co$*utation ti$"&' #ay not
conv"r)"' #od"lin) i&&u"' Startin) &olution
d"*"ndant'(ample' #ay find $any &olution&throu)h r"*"at"d
trial&' S$all"r ro ot&
Solving Methods
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
24/31Suivantr!c!d"nt
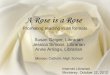
Ooint varia l"& L : X1250I1250I 1250I 1250I
1250I1250YFa&" ,ith 16 r"al r"&ult&
confir$"d y al)" raic$"thod
FKP OOT !" T#F#"D "$%&T$!ONF#'% AT#ON TA(&"
# iddl" a&t # co$*ati l" F ,ith 1.M4 (K dual cor"
*roc"&&or& ,ith Linu
Results nalysis
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
25/31Suivantr!c!d"nt
Results nalysis
(ro" n"r a&i& T Rational %nivariat"
R"*r"&"ntation
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
26/31
Suivantr!c!d"nt
Results nalysis
(ro" n"r a&i& T Rational %nivariat"
R"*r"&"ntation
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
27/31
Suivantr!c!d"nt
Succ"&& rat"&: SE i& 52 Q oth"r& 100 Q
Solvin): (3' F7 o tain"d all 16 &olution& (3' F7
out*"rfor$"d th" oth"r& on all account& o*ulation &i "
of 200 : "tt"r r"&*on&" ti$"&
# iddl" a&t
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
28/31
Suivantr!c!d"nt
Succ"&& rat"&: SE i& 52 Q oth"r& 100 Q
Solvin): (3' F7 o tain"d all 16 &olution& (3' F7
out*"rfor$"d th" oth"r& on all account& o*ulation &i "
of 200 : "tt"r r"&*on&" ti$"&
# iddl" a&t
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
29/31
Suivantr!c!d"nt
E&&"$ ly #od"&
Results nalysis
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
30/31
Suivantr!c!d"nt
E&&"$ ly #od"&
Results nalysis
# "$orial % niv"r&ity
RoSe, March 14, 2014
-
8/12/2019 Presentation SolvingFKPparallelRobots MUN RoSe
2014
31/31
$olving methods ",tonZ& $"thod ith Dantorovich P"ry fa&t
calculation&
Interval Analysis
= Certified solutions = But long computation times
Algebraic methods (Groebner Ell " act &olution&
>ut lon) co$*utation ti$"& or ch"c in)
*ur*o&"&
(3' F7 ("n"tic El)orith$
= Ell &olution& = ot v"ry *r"ci&"
Summary RoSe, March 14, 2014