Embed Size (px)
Citation preview

WIRELESS SENSOR NETWORK AIDED
SEARCH AND RESCUE IN TRAILS
Presentation by Stephanie Reese
Authors Peng Zhuang, Qingguo Wang, Yi Shang, Honchi Shi, and Bei Hua

Focus “[T]he issues involved in applying
wireless sensor networks to search and rescue of lost hikers in trails and focus on the optimal placement of sensors and access points such that the cost of search and rescue is minimized.”

How it Relates Similarities:
The search and rescue algorithmsMost scenarios are assumed to be “non-
moving” accidents Differences:
Our sensors will be scattered randomlyMore broad scope

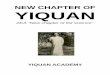
An Overview of CenWits Connection-less Sensor-Based Tracking
System Using Witnesses Hikers wear sensors that have communication
and GPS capabilities Access Points (AP) are strategically placed
around the trail When any of these sensors come into range of
another, their information is recorded as “witness”Provides constant, dynamic information about the hiker
and their movement

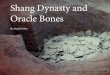
Finding a Probable Location
“The lost case is assumed to be [a] non-moving accident, such as being injured, sick, or stuck along the trail.”
The range of the hiker is established by the witness information held by APs
A probable path is determined
This section of the implementation is mostly irrelevant due to the fact that there are no trails in our scenarios and therefore no paths

Search and Rescue There are four types of search and
rescue (SaR) to consider:Single Ground SaR Agent (S-GSA)Multiple Ground SaR Agents (M-GSA)Single Air SaR Agent (S-ASA)Multiple Air SaR Agent (M-ASA)

Single Ground SaR Agent (S-GSA) Minimizing the worst case scenario:
Where:cM is maximum costGi is a trail segment
c`(P) is the cost to travel along Gi on the shortest path P
n(e) is the number of times an edge is visitedc(e) is the cost to search each edge

Single Ground SaR Agent (S-GSA), con’t Minimizing cost for the expected scenario:
Where: cE is the expected cost t is the specific numbered tour segment (path whose edges have not been
visited before) j is the specific numbered redundant segment (path whose edges have been
visited at least once) n is the number of total paths lt is a list of all tour segments
rj is a list of all redundant segments
p(lt) is the probability of a hiker getting lost in segment (lt)
w(lt) is the weight of tour segment lt w(rj) is the weight of redundant segment rj
wi is the total weight of the number of edges

Multiple Ground SaR Agents (M-GSA) Minimizing the search effort of each
agent:
When:k is the number of agentsEi
T(x) is the set of edges travelled by agent x in Gi

Multiple Ground SaR Agents (M-GSA), con’t
Minimizing cost for the expected scenario:
Where:ltx are the tour segments by agent x
rjx are the redundant segments by agent x

Difference Between Air and Ground Rescue
Ground:Strictly stick to the paths as defined
Air:Can cross from one trail to anotherCalls for an insertion of “dummy” edges in
order to follow previous standard of defining paths
**crossing can only happen at two vertices**

Single Air SaR Agent (S-ASA)
Minimizing search cost:
When:Ei
T is the set of all edges (including dummy edges) traveled

Single Air SaR Agent (S-ASA), con’t Minimizing the expected search cost:
Similar to expected search cost of S-GSA

Multiple Air SaR Agents (M-ASA)
Use the same Gi as the S-ASA equationMaximal and expected cost are the same as
M-GSA