-
8/13/2019 presentaion of fluid
1/19
Machine DynamicsChapter 1
Dr. Dongming GanDr. Dongming Gan
Slides Adapted from
Prof. Kostass lectures
-
8/13/2019 presentaion of fluid
2/19
Mechanism CategorizationMechanism Categorization
Based on the characteristics of the motionof the links:
Planar Mechanisms
Spherical Mechanisms
Spatial Mechanisms
-
8/13/2019 presentaion of fluid
3/19
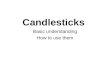
Mechanism Categorization:Mechanism Categorization: Planar
Mechanism
All its particles move on planar curves
parallel to a single common plane
Their motion can be observed from
single direction i.e. from a single view The majority of
practical mechanisms, e.g.
Planar four-bar linkage
Plate cam & followerSlide crank mechanism
-
8/13/2019 presentaion of fluid
4/19
Mechanism Categorization:Mechanism Categorization: Planar
Mechanism
Planar Linkages: Planar Mechanismsutilizing ONLY lower pairs
i.e.
revolute pairs: axes normal to motion plane
prismatic pairs: axes parallel to motion plane
-
8/13/2019 presentaion of fluid
5/19
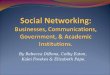
Mechanism Categorization:Mechanism Categorization: Spherical
Mechanisms
Have a stationary point as they move
The locus of each pt is on a spherical surface
All spherical surfaces are concentric
Example: Hookes Universal joint (or Cardan
joint)
-
8/13/2019 presentaion of fluid
6/19
Mechanism Categorization:Mechanism Categorization: Spatial
Mechanisms
No restrictions on the relative motions
Complex motion and simple techniques do
not suffice
Will be covered during the end of the
course in the context or Robotics
-
8/13/2019 presentaion of fluid
7/19
Mechanism MobilityMechanism Mobility
The number of input parameters (pair
variables) that must be independentlydetermined to bring the
device into a particular
position / orientation
Can be determined by its Number of links
Number & Type of joints
-
8/13/2019 presentaion of fluid
8/19
Mechanism Mobility:Mechanism Mobility: Kutzbach Criterion
n: number of links, including the fixed
Each link has 3 DOF (except for the fixed
one) i.e. 3(n-1) in total
j1: number of 1 DOF pairs
j2: number of 2 DOF pairs
Kutzbach Criterion for mobility m :m=3(n-1)-2j1-j2
-
8/13/2019 presentaion of fluid
9/19
Mechanism Mobility:Mechanism Mobility: Kutzbach Criterion
m=3(n-1)-2j1-j2
-
8/13/2019 presentaion of fluid
10/19
Mechanism Mobility:Mechanism Mobility: Kutzbach Criterion
m=3(n-1)-2j1-j2
-
8/13/2019 presentaion of fluid
11/19
Mechanism Mobility:Mechanism Mobility: Kutzbach Criterion
m=3(n-1)-2j1-j2
-
8/13/2019 presentaion of fluid
12/19
Mechanism Mobility:Mechanism Mobility: Kutzbach Criterion
m=3(n-1)-2j1
-j2
Criterion failed because did not consider
dimensional properties of links. Good for early design
considerations
-
8/13/2019 presentaion of fluid
13/19
Mechanism Mobility:Mechanism Mobility: Grubler Criterion
From Kutzbach Criterion: m=3(n-1)-2j1-j2
which applies to Planar Mechanisms,
if
1 DOF joints (j2=0)
andm=1
thenGrubler Criterion3n-2j1-4=0
The simplest mechanism
-
8/13/2019 presentaion of fluid
14/19
Mechanism Mobility:Mechanism Mobility: Grubler Criterion
The simplest mechanism satisfying 3n-
2j1-4=0 is forn=j1=4
Slider-crank 4-bar linkage
-
8/13/2019 presentaion of fluid
15/19
Mechanism Mobility:Mechanism Mobility: 33--DDKutzbach &
Grubler
Criteria
Kutzbach : m=6(n-1)-5j1-4j2-3j3-2j4-j5
Grubler: 6n-5j1-7=0
The simplest mechanism satisfying the 3-D
Grubler is for n=j1=7
-
8/13/2019 presentaion of fluid
16/19
Mechanism Mobility:Mechanism Mobility: ExamplesExamples
n=5 j1=5 j2=1
m=3(n-1)-2j1-j2=1
-
8/13/2019 presentaion of fluid
17/19
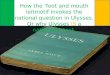
Mechanism Mobility:Mechanism Mobility: ExamplesExamples
n=7 j1=9 j2=1
m=3(n-1)-2j1-j2=-1 wrong!!!! m=1 !
-
8/13/2019 presentaion of fluid
18/19
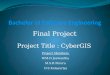
Mechanism Mobility:Mechanism Mobility: ExamplesExamples
n=5 j1
=5 j2
=1
m=3(n-1)-2j1-j2=1
-
8/13/2019 presentaion of fluid
19/19
TITLE
Sub-Title