-
JAG l Volume 3 - Issue 4 - 2001
Precision rectification of high resolution satellite imagery
without ephemeris data
Saeid Sadeghian 1,2, Mohammad Javad Valadan Zoej3, Mahmoud Reza
Delavarl, Ahmad Abootalebiz
1 Surveying Engineering Department, Engineering Faculty, Tehran
University, Tehran, Iran
2 National Cartographic Center (NCC), PO Box 13185-1684, Tehran,
Iran (e-mail: [email protected])
3 Department of Geodesy and Geomatics Engineering, K.N. Toosi
University of Technology, No. 1346, PO Box 19697, Tehran, Iran
(email: [email protected])
KEYWORDS: High resolution satellite imagery, IKONOS,
SPOT, KFA-1000, mathematical models, rational func-
tion, DLT, multiquadric, finite elements, accuracy.
ABSTRACT
The huge capability of high resolution satellite imageries
(HRSI),
that includes spatial, spectral, temporal and radiometric
resolutions
as well as stereoscopic vision introduces them as a powerful
new
source for the Photogrammetry, Remote Sensing and GIS
communi-
ties. High resolution data increases the need for higher
accuracy of
data modeling. The satellite orbit, position, attitude angles
and
interior orientation parameters have to be adjusted in the
geometri-
cal model to achieve optimal accuracy with the use of a
minimum
number of Ground Control Points (GCPs). But most high
resolution
satellite vendors do not intend to publish their sensor models
and
ephemeris data. There is consequently a need for a range of
alter-
native, practical approaches for extracting accurate 2D and 3D
ter-
rain information from HRSI. The flexibility and good accuracy
of
the alternative models demonstrated with KFA-1000 and the
well-
known SPOT level 1A images. A block of eight KFA-1000 space
photos in two strips with 60% longitudinal overlap and 15%
lateral
sidelap and SPOT image with rational function, DLT, 2D
projective,
polynomials, affine, conformal, multiquadric and finite
element
methods were used in the test. The test areas cover parts of
South
and West of Iran. Considering the quality of GCPs, the best
result
was found with the DLT method with a RMSE of 8.44 m for the
KFA-1000 space photos.
INTRODUCTION
In spite of many years of updated launch announcement, program
delays and five recent failures to deploy a num- ber of high
resolution satellites, such as Earlybird-l 1997,
EROS-A 1998, IKONOS-1 1999, QuickBird- 2000, OrbView- 2001, with
the successful launch and deploy- ment of IKONOS-2 satellite in
September 1999, EROSAI
in December 2000 and QuickBird- in October 2001, the era of
commercial high-resolution earth observation satellites for digital
mapping began. Several US compa- nies, Russia, France and India
scheduled launches of such high-resolution imaging satellites.
Therefore the number
of high resolution satellite sensors for mapping applica-
tions is growing fast. The geometry of them is based on
the pushbroom principle which differs significantly from
photogrammetric frame cameras such as KFA-1000
space photos. In contrast to frame cameras which pre-
serves the same orientation of the 3-D bundle of imaging
rays for the whole frame, the spatial position and orien-
tation of the imaging sensor is continually changing along the
orbit and the imaging geometry becomes
dynamic and time-dependent.
In the past 15 years many different models for geometric
correction have been developed, for example Gugan
(1986) suggested an orbital parameter model. The model
was successfully adapted by Valadan Zoej (1998) and
applied to SPOT level 1 A and 1 B, MOMS-02 and IRS-l C imagery
(Valadan Zoej, 1999). But the ancillary data
(position, velocity vectors and angular rates) of the satel-
lite platform have not been provided with IKONOS
images. Therefore alternative ways of camera modeling
should be used. Recently, several approaches have been
reported to tackle this issue. Among them, the Rational
Function Model (RFM) seams to gain popularity, that
does not require parameters of the interior orientation
and ephemeris information. The solution is based only on
ground control point. This is an advantage for processing
the new HRSI. In this paper the possibility by using non-
rigorous sensor model for geometric correction of HRSI
has been explore and tested for KFA-1000 and
images.
SPOT
HIGH RESOLUTION SATELLITE IMAGERY (HRSI) Fritz (1999) classified
five categories of spatial resolution with break points at 0.5, 3,
30 and 300 m, that O.S
-
Rectification of high resolution satellite imagery JAG l Volume
3 - Issue 4 - 2001
erating cross track stereo a base-height
(sensor height) ratio of 0.6 and
(Li, R, 1998). The high resolution systems that scheduled
worlds first high resolution commercial satellite,
Imaging in September
4-meter 1 l-bit multispectral sensor. IKONOS in a
sun-synchro-
through the use of implemented
digital star trackers to establish precise camera
position and attitude (Zhou, 2000). The KFA-1000 cam-
era system is originally planned for interpretation
mapping of a good
resolving
objects like paths narrower than three
meters can be seen on these images when there is suffi-
cient contrast on the The KFA-1000 photo has 5
fiducial marks, 4 in the center of each side and 1 in the
photo center, So, the transformation to the calibrated
fiducial mark coordinates is not a problem. The fiducials
are superimposed onto the film and if there is not suffi-
cient contrast, observation of them can be difficult. The
KFA-1000 imaging system has the advantage of being an
optical frame sensor and is not made of a linear array
sensor such as IKONOS and SPOT. They do not have
problems like shifts or variations between successive sen- sor
orientations. However, they have problems like pho-
tographic processing and storage. The vertical accuracy
on the other side is limited by mapping with space pho-
tos. For map revision the vertical component is unimpor-
tant. The height accuracy is mainly determined by the
base to height ratio (B/H). The KFA-1000 has not been
designed for optimal height accuracy. B/H for SPOT4 is
better but the difference in time between the recording
of the same area by SPOT4 can cause some problems. For
example, the reflectance of the ground may be changed.
For KFA-1000 and IKONOS images such a problem with
the stereo effect do not exist. Comparison of technical
data for operational earth observation sensors show in
Table 2.
Due to technical limitation there is still a linear relation
between spatial resolution and swath width. Using high
resolution systems the number of scenes would have to
be increased quadratically for a certain application which
causes additional time and costs for buying, storing and
processing the data. But the sensor in the medium range like
SPOT or KFA-1000 has large swath width.
3 ALTERNATIVE MODELS
TABLE 1. High resolution commercial earth observing satellites
that scheduled for future
System
-
Rectification of high resolution satellite imagery
make an orbital resection unstable, and even if many
ground control points and several images are used, a
solution may not be possible. The rigorous sensor model
usually has some disadvantages (Madani, 1999):
- Usually, sensor models and their physical parameters
are not known. Satellite vendors may not publish their
sensor models.
- The rigorous model is usually complex, requiring spe-
cialized software.
- The real-time mathematical model of analytical plot-
ters or softcopy systems must be changed for each dif-
ferent image sensor.
- Selecting proper software for multi-sensor triangula-
tion and using its mathematical model in the real-time
loop can be difficult.
There is consequently a need for a range of alternative,
practical approaches for extracting accurate 2D and 3D
terrain information from high resolution satellite imagery
(Fraser, 2000; Hanley, 2001).
3.1 RATIONAL FUNCTION MODEL (RFM)
The concept of RFM was developed by Gyer, and has
been used extensively by the US Defense Mapping
Agency in their Digital Production System for example
PEGASUS (Greve, 1992). The RFM is widely used is US
intelligence community. An image coordinate is deter-
mined from a ratio of two polynomial functions (OGC,
1999). The RFM maps three-dimensional ground coordinates to
image space on any differentially perspective imagery to
include panoramic, IKONOS, SPOT, MOMS, Landsat, strip and frame
imageries like KFA-1000. The Rational
Polynomial Camera (RPC) IKONOS model is expressed sim-
ply as a ratio of two cubic polynomials. It is generic
enough to be easily interfaced with most softcopy pho-
togrammetric packages. Furthermore, it contains enough
degrees of freedom to maintain full accuracy of the phys-
ical IKONOS sensor. RPC IKONOS model differs by no more
than 0.04 pixel from the physical model, with the RMS
error below 0.01 pixel (Grodecki, 2001). DLT, 2D projec- tive,
polynomials, affine, conformal transformation and
also collinearity equations is a simplified form of the RFM.
3.1.1 Direct linear transformation (DLT) Eleven linear
orientation parameters defining the rela-
tionship between two dimensional image space and
three-dimensional object space.
3.1.2 Two dimensional projective transformation It is defined by
eight parameters, the relationship
between the object and image planes.
3.1.3 Polynomial approach
A frequently used approach to model real-time image geometry
uses polynomial functions (instead of rigorous
models).
JAG l Volume 3 - Issue 4 - 2001
3.1.3.1 Affine
The model for 3D analysis of linear array imagery via a 20
affine model is given (Hattoriet al, 2000). High resolution
satellite imaging sensors feature very long focal lengths
and narrow fields of view, for example 0.93 for IKONOS
but 4 for SPOT and 7 for MOMS. Therefore high corre-
lations develops between EO parameters within a per-
spective projection since the narrow bundle of rays effec-
tively approaches a parallel projection.
3.1.3.2 Conformal Four parameter similarity model (a rotation,
shift and uni-
form scaling).
3.1.3.3 Multiquadric approach
A polynomial is first used to model the general geomet-
ric transformation. An interpolating function is then used
to separately fit the vectors of residuals in X and Y at
each control point. Weights explaining the effect of local
distortions measured at each control point are calculated
using an interpolating matrix developed from distance
between control points. Details are given by Ehlers
(1997).
3.2 FINITE ELEMENT METHOD
The finite element method provids a systematic proce-
dure for the derivation of the approximation functions
over subregions of the domain. The method is endowed
with three basic features that account for its superiority
over other competing methods. First, a geometrically
complex domain of the problem is represented as a col-
lection of geometrically simple subdomains, called finite
elements. Second, over each finite element, the approxi-
mation functions are derived using the basic idea that
any continuous function can be represented by a linear
combination of algebraic polynomials. Third, algebraic
relations among the undetermined coefficients (i.e.,
nodal values) are obtained by satisfying the governing
equations, often in a weighted-integral sense, over each
element.
Linear triangular elements were used in this investiga-
tion.
4 TEST DATA 4.1 TEST AREA AND DATA OF THE KFA-1000 PHOTOS
A block of eight KFA-1000 photos in two strips with 60%
longitudinal overlap and 15% lateral sidelap was used in the test.
The adjacent photo strips had been
exposed simultaneously with the KFA-1000 double cam- era system
where the rotational angle between the cam- era unit is 16 degrees.
The flying height was 276 km and the image size on the ground was
80*80 km. The focal length of the camera was 1009 mm, and the
original image scale was about 1:272000. The photos had been taken
in 1990 of the South of Iran and the test area is
368
-
Rectification of high resolution satellite imagery
flat. There were not remarkable differences in contrast
and sharpness between photos. The radial distortions of
the camera lenses were given in 8 different directions with the
last digit of 10 microns. The values were given
only to the radius length of 140 and 184 mm from the
origin of coordinates and the distortion was strongly
asymmetric. At the same distance along different radius,
the difference in distortion values could be up to 50
microns.
The main problem of handling space photos and images is the
availability of GCPs. In this test GCPs have been
measured on the model at a scale of I:40000 aerial
photos in DSR14 analytical plotter after completion of
inner, relative and absolute orientation. The two color
films of the KFA-1000 supported the object identifica-
tion. The accuracy of the GCPs was estimated to be bet-
ter than 1 m.
There was no available photogrammetric instrument in
Iran of sufficient accuracy that could be used because of
the large format of the photos (30*30cm). Ways of over-
coming the problems can be as follows: 1) Making a pho-
tographic reproduction of the image in suitable pieces,
measuring with traditional instruments and pining the
pieces together before calculation. 2) Shipping the image to a
foreign institution which has image carriers of suffi-
cient size. 3) Reproducing the image photographically from the
original 30*30cm size to 23*23 cm to be mea-
surable in a mono comparator. 4) Using overlapping
copies (23*30) in Planicomp Pl, analytical plotter. 5)
Scanning the space photos and use the digital pho- togrammetric
and image processing systems. At first
method 3 was used. For determination of geometric dis-
tortion of camera a grid was used and then the grid and
its photo were measured. After computation, it was real-
ized that geometric distortion due to photography is high
(for example 150 micron) and the root mean square
errors of residuals was 530 micron because of large lens
JAG . Volume 3 - Issue 4 - 2001
distortion of camera, therefore, method 1 was employed.
Point selection, numbering and pugging were prepared.
Artificial points (tie points) drilled into emulsion with
PUG V Wild. After calibration, photo coordinates of the
18 pieces of 8 KFA-1000 photos were measured with a
monocomparator.
After making a photographic reproduction of the image
in suitable pieces and measuring with traditional instru-
ments, the pieces are then joined together before calcu-
lation. The pieces of one KFA-1000 photo pinned with
conformal transformation using at least four common points. The
results were better than 3 micron.
4.2 TEST AREA AND DATA ACQUISITION OF THE SPOT
IMAGE
The SPOT level IA image that was used covers the
Kermanshah area in the west of Iran. It was acquired in
September 1999. Height range of the terrain is 1300 m
to 3500 m. A GPS survey to provide the test field of
ground control and check points was carried out by staff
from N.C.C. in 2001. Their positions and heights were
measured using GPS employing differential GPS tech-
niques. The position of the GCPs on image were mea-
sured monoscopically using the PCI EASYPACE package,
who knew the positions of these points on the ground.
The image measurements were then presented and input
to the adjustment program.
5 EVALUATION OF RESULTS Table 3 and 4 show the summary of the
results of poly-
nomials and multiquadrics methods. Using a 11 terms
polynomial transformation, various tests was carried out
on the SPOT level 1 A data. 12 points was used as control
points and the remaining 7 points as check points.
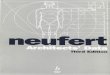
The vector diagram constructed from the residual values
achieved with 12 control points and 7 check points for
TABLE 3. AE , AN RMSE values achieved in terms of UTM
coordinates of the SPOT level IA data
Method Control Points (n=l2
Polynomial AE b-t) AN (ml API (m) 3 term (affine) 149.73 25.07
151.81
4 term (xy) 138.62 23.34 140.57
5 term (x2) 14.21 3.04 14.53
6 term (~2) 13.93 3.02 14.25
7 term (x2y) 13.24 2.75 13.52
8 term (xy2) 13.23 2.29 13.43
9 term (~2~2) 10.26 2.24 10.50
10 term (x3) 3.90 0.98 4.02
11 term (~3) 3.71 0.11 3.71
Multiquadric (3 term) 0.00 0.00 0.00
Multiquadric (6 term) 0.00 0.00 0.00
Multiquadric (10 term) 0.00 0.00 0.00
Rational PCI V7.0 13.84 4.77 14.63
AE (m) 185.80
189.02
18.10
18.77
16.90
17.04
20.20
13.56
13.65
185.70
3.85
13.32
18.12
Check Points (n= 7)
AN b-4 API (m) 29.12 188.07 29.67 191.33 3.72 18.47 3.52 19.10
3.02 17.16
2.61 17.24
2.73 20.39
6.69 15.13
9.43 16.59
29.11 187.97
15.08 15.57
6.94 15.02
7.83 19.73
369
-
Rectification of high resolution satellite imagery JAG l Volume
3 - Issue 4 - 2001
the SPOT level IA are included as Fig.1. This diagram
shows that the residual errors at the individual control
and check points are completely random, no systematic
component can be discovered in this plot.
Table 5 shows the summary of the results of 30 projec-
tive (DLT), 20 projective, finite elements and conformal
methods. In finite element method, a linear triangle ele-
ment with six node was used.
CONCLUSIONS AND RECOMMENDATIONS
This project described the interpolative mathematical
models for geometric corrections of space photos and
images. It is important to note that polynomials are
mathematically unconstrained between control points such that
higher order polynomials will begin to intro-
duce undesirable oscillations. The application of the mul-
tiquadric method in the image registration and rectifica-
tion is suitable, than using global polynomials or local
piecewice methods. The great advantages of the multi-
quadric algorithm are that : i) it describes a continuous
interpolation function; ii) all GCPs contribute to the
geometric transformation; and iii) the image geometry can be
wrapped in any given constraint.
For KFA-1000 photos with 2D and 3D projective for inde-
pendent check points, accuracy is better than IOm. Projective
transformation with a priori affine or projective
inner orientation gave better results than without it. The
results of DLT is better than 2D projective transforma-
tion. KFA-1000 photos give better results than SPOT
image. KFA-1000 photos can be used for production of
photomap, planimetric map, thematic map and updating
of topographic map up to scale of 1:50000.
TABLE 4. AE , AN RMSE values achieved in terms of UTM
coordinates of the KFA-1000 data
Method Control Points (x21 Check Points (n= 7)
Polynomial AE (ml AN b-n) API (m) AE b-4 AN (ml API (m) 3 term
(affine) 92.18 97.86 134.44 89.23 107.85 139.98 4 term (xy) 67.66
16.54 69.65 76.18 20.28 78.83
5 term (x2) 8.65 11.96 14.76 7.82 19.44 20.95
6 term (~2) 7.95 9.57 12.44 7.63 17.90 19.46
7 term (xzy) 6.61 9.28 11.39 9.74 17.26 19.82
8 term (xy2) 4.76 5.67 7.41 9.24 13.11 16.04
9 term (~2~2) 4.74 5.39 7.18 8.63 12.84 15.47
10 term (x3) 4.74 5.37 7.16 8.63 12.98 15.59
11 term (~3) 4.65 5.35 7.09 8.39 12.95 15.43
12 term (xy3) 4.61 4.77 6.64 8.70 12.33 15.09
13 term (x3y) 3.63 2.60 4.47 9.65 12.42 15.73
14 term (~2~3) 3.39 2.59 4.27 9.61 12.46 15.74
15 term (~3~2) 3.35 2.42 4.13 9.71 11.78 15.27
16 term (x5) 2.71 1.64 3.17 70.38 61.80 93.66
Multiquadric (3 term) 0.00 0.00 0.00 89.22 107.85 139.97
Multiquadric (6 term) 0.00 0.00 0.00 12.21 11.22 16.58
Multiquadric (10 term) 0.00 0.00 0.00 11.70 12.38 17.03
TABLE 5. BE, AN RMSE values of check points achieved in terms of
UTM coordinates of the KFA-1000 data
Methods AE fm) AN (4 API (ml
DLT 06.07 05.86 08.44
2D Projective 05.46 08.12 09.78
Finite element 26.95 08.30 28.19
Conformal - 78.00
FIGURE I Vector plot of the planimetric errors at the control
and check points over the Kermanshah area for SPOT level IA. Blue
pluses are check points and red circles are control points
-
Rectification of high resolution satellite imagery JAG l Volume
3 - Issue 4 - 2001
The flexibility and good accuracy of the solution is
demonstrated with KFA-1000 and SPOT images. These
models can be easily used to process images from high resolution
imaging system.
ACKNOWLEDGEMENT
The authors would like to thank Dr. J. Amini for helpful
comments on this paper, and National Cartographic
Center (N.C.C.) for SPOT image and GCPs and National
Geographic Organisation (N.G.O.) for KFA-1000 photos.
REFERENCES
Ehlers, M., 1997. Rectification and Registration, integration of
Geographic information Systems and Remote Sensing (J. Star, J.
Estes, and K. Mcgire, editors), Cambridge University Press.
Fraser, C.S., 2000. High-resolution satellite imagery: a review
of metric aspects. International Archives of photogrammetry 8
remote sensing, Amsterdam, 33(87): pp.452-459.
Fritz W. 1999. High resolution commercial remote sensing
satellites and spatial information systems, Highlights ISPRS, vol.
4, pp.19- 30.
Greve, C. W., 1992. Image processing on open system, Photogram-
metry Engineering & Remote Sensing, 58(l): pp.85-89.
Grodecki, J., 2001. lkonos stereo feature extraction - PRC
approach. ASPRS Annual Conference, St. Louis, 23-27 April, 7 pages
(on CD-ROM).
Gugan, D., 1986. Practical aspects of topographic mapping from
SPOT imagery. Photogrammetric Record, 12(69), pp.349-355.
Hanley H.B., Fraser C.S., 2001. Geopositioning accuracy of
IKONOS imagery: indications from 2D transformations,
Photogrammetric Record, 17(98), pp. 317-329.
Hattori S., Ono T., Fraser C., Hasegawa H., 2000. Orientation of
high-resolution satellite images based on affine projection,
International archives of photogrammetry & remote sensing,
Amsterdam, 33(83): pp. 59-366.
Li, R. 1998. Potential of high-resolution satellite imagery for
national mapping products, Photogrammetry Engineering & Remote
Sensing, ~01.64, no.12, pp.1 165-l 170.
Madani, M., 1999. Real-time sensor-independent positioning by
rational functions, Direct versus indirect methods of sensor ori-
entation workshop of ISPRS , Barcelona, November 25-26, pp.
64-75.
OGC, 1999. The Open GIS Abstract Specification. Volume 7: The
Earth Imagery Case (99-107.doc). http://www.opengis.org/
techno/specs.htm
Sadegihan 5.. Amini J., 2000. Precision rectification of
KFA-1000 and SPOT images using the multiquadric and DLT model over
a test area in IRAN, International archives of photogrammetry &
remote sensing, Amsterdam, vol. 33 (supplement B4), pp.74-81.
Valadan Zoej, M., Petrie, G., 1998. Mathematical modelling and
accuracy testing of SPOT level 1B stereopairs. Photogrammetric
Record, 16(91), pp. 67-82.
Valadan Zoej, M., Foomani, J., 1999. Mathematical modelling and
accuracy testing of IRS-1C stereo pairs. Joint Workshop of ISPRS WG
l/l, l/3 and IV/4, Sensors and Mapping from Space, Hanover,
September.
Yang Q., Snyder J., Tobler W., 2000. Map projection
transformation principles and applications, Taylor & Francis
publishers. London EC4P.
Zhou G., Li, R., 2000, Accuracy evaluation of ground points from
IKONOS high resolution satellite imagery, photogrammetry
Engineering & Remote Sensing, ~01.66, no.9, pp.1 103-l 112.
RESUME
Lenorme capacite dimageries satellites de haute resolution
(HRSI), qui incluent des rPsolutions spatiale, spectrale, temporel-
le et radiometrique ainsi que la vision stereoscopique introduit
une puissante et nouvelle source de donnees pour les commu- nautes
de la Photogrammetrie, de la Telededection et des SIG. Des
don&es de haute resolution accroissent le besoin dune meilleure
precision de modelisation des donnees. Lorbite du satellite, la
position, les angles dattitude et les parametres dorientation
interne doivent @tre ajustes dans le modPIe geome- trique pour
atteindre une precision optimale avec Iutilisation dun nombre de
points de calage (GCPs) minimum. Mais la plu- part des vendeurs
dimages satellite de haute resolution nont pas Iintention de
publier les modeles de leurs capteurs et les donnees dephemerides.
II y a par consequent un besoin pour un &entail dalternatives,
des approches pratiques pour extraire une information terrain 2D et
30 a partir des HRSI. La flexibilite et la bonne precision des
modPIes alternatifs a et@ demontre avec KFA - 1000 et les images
SPOT niveau 1A bien connues. Un bloc de 8 photos spatiales KFA -
1000 dans deux bandes avec un recouvrement longitudinal de 60 % et
un recouvrement late- ral de I5 % et des images SPOT avec une
fonction rationnelle, DLT, des transformations projective 2D,
polynomiale, affine, conforme, multiquadratique et la methode des
elements finis ont eteutilises dans ce test. Les zones de test se
situent le sud et Iouest de Ilran. Considerant la qualite des
points de calage (GCPs), les meilleurs resultats ont et@ obtenus
par la methode DLT avec une EMQ de 8.44 m pour les photos spatiales
KFA - 1000.
RESUMEN
La enorme capacidad de las imdgenes satelitdrias de alta resolu-
ci6n (ISAR), incluyendo resoluci6n espacial, espectral, temporal y
radiometrica, asi coma visi6n estereoscbpica, las convierte en una
poderosa nueva fuente para las comunidades de cientificos
trabajando en Fotogrametria, Teledetecci6n y SIG. La disponibili-
dad de datos de alta resoluci6n incrementa la necesidad de mayor
precisi6n en la modelizacion de 10s datos. La orbita del satelite,
su posici6n, sus dngulos de postura y sus pardmetros de orientaci6n
interna tienen que ser ajustados en el modelo geo- metrico, para
obtener una precisi6n 6ptima con el use de un ntjmero minim0 de
Puntos de Control de Terreno (PCT). Pero, la mayoria de 10s
proveedores de satelites de alta resoluci6n no tiene la intenci6n
de divulgar sus modelos de sensores y sus datos de efemerides. En
consecuencia, se requiere una gama de enfoques alternativos
prdcticos para extraer informaci6n de terreno precisa en 2D o 3D a
partir de las ISAR. La flexibilidad y la buena precisidn de 10s
modelos alternativos quedaron demos- tradas con las imdgenes KFA-I
000 y SPOT tipo IA. En el ensayo, se hizo use de un bloque de echo
fotografias espaciales KFA- 1000 en dos fajas con un solapamiento
longitudinal del 60% y lateral del I5%, y una imagen SPOT con una
funcion rational, DLT, una proyeccion ZD, polinomios, y metodos
afines, confor- males, multicuadrdticos y de elementos finitos. Las
areas de ensayo cubren partes del Sur y Oeste de Iran. Considerando
la calidad de 10s PCT, el mejor resultado se obtuvo con el metodo
DLT, con un error residual medio estandar de 8.44 m para las
fotograflas espaciales KFA-1000.
371