Embed Size (px)
Citation preview

Practical Requirements for a Domestic Vacuum-Cleaning Robot
Frank JenkinsJRL ConsultingP.O. Box 1289
Menlo Park, CA, 94026(415) 851-3475 [email protected]
Abstract
Consideration of the environmental, commercialand legal constraints on a practical home vacuum-cleaning robot suggests that the best configura-tion is a compact single-purpose vehicle designedto map and follow a deliberate path. This config-uration, suitably equipped with the necessaryexternal and internal sensors, serves to define theAI requirements for mapping, path following,contingency handling and user interface.
Introduction
Developing a commercially-viable robot forautonomously vacuuming a domestic house-hold poses requirements qualitatively differentthan those encountered in a research or indus-trial environment.
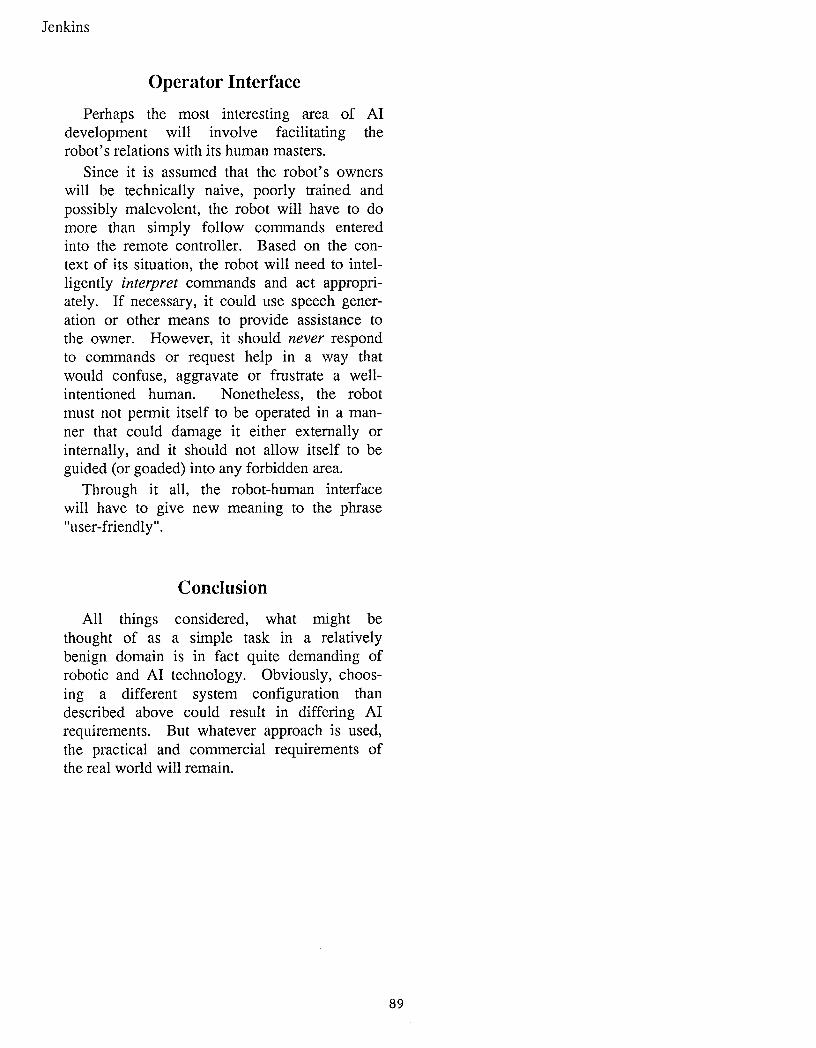
As diagrammed in Figure 1, environmentaland commercial/legal considerations defineboth the viable configuration options and thesensor requirements. All of these then com-bine to drive the required AI capabilities. Overthe long term, it can be expected that someinfrastructure changes will be made to accom-modate robots, but the initial products mustdeal with the world as it is today.
The purpose herein is not necessarily toadvocate specific AI methods or representa-tions, but rather to describe the overall practi-cal considerations and the AI requirementsthat are ultimately derived. It will be assumedthat the robot must use existing or near-termmechanical and electronic technology.
Environmental Considerations
The constraints imposed by a house (orapartment) by itself are fairly obvious. Roomsare located and configured randomly, and areconnected by various types of doors. Certaindoorways or other openings will lead outsideor into closets. Open stairwells and fireplacesmay be unprotected. Floor texture and hard-ness can vary greatly. Obstacles can beuniquely configured, dynamically located, frag-ile and possibly expensive. And, of course,lighting conditions can range from completedarkness to direct sunlight.
One consideration results directly from thevacuum cleaning task. Low-profile obstaclessuch as extension cords, throw rugs and news-papers may not block the robot’s path, butcould jam the vacuuming system.
The presence of humans and their petsmakes things more interesting. "Guest" adultsmay be unfamiliar with the robot. Children willattempt to ride upon, mislead or otherwiseplay with the robot. Infants will be inattentiveand especially vulnerable. Pets may attack therobot, or perhaps just block its path. TVs,stereos and children will generate a high ambi-ent noise level. Unfortunately, it must also beexpected that objects will be dropped on, andliquids will be spilled upon the robot.
85
From: AAAI Technical Report FS-93-03. Compilation copyright © 1993, AAAI (www.aaai.org). All rights reserved.

Jenkins
Commercial and Legal Considerations
Beyond the household itself, several otherissues will determine the robot’s practicalityas a consumer appliance.
First, it must be assumed that the robot’sowner will neither have nor desire any under-standing of robotics, electronics or AI. Itshould also be expected that any "Owner’sManual" will not be read. Ideally, the ownerwould be able to install the robot using a set ofsimple instructions. An acceptable alternativewould be to have the robot initially installed bya trained technician, who would then providethe owner with simple instructions for use.Optimally, no physical changes to the house-hold should be required, but the placing ofsmall passive markers at selected locationswould probably be acceptable. In any case,installation should normally require less thanone hour.
Second, the robot must be extremely reli-able and robust in operation. Other than occa-sional replacement of the dust bag, the robotshould not require maintenance more than onceor twice a year. It must be unaffected by (orcompensate for) high ambient noise, radiotransmissions, unshielded computers, infraredremote controllers, and magnetic fields. Itmust recognize any internal failures and contin-ue to function as normally as possible. Also, itshould have an effective mechanism to reducethe chance of theft or other unauthorized use.
Third, the existing legal climate requiresthat the robot be extremely safe in operation.Any active sensors must not emit light,microwaves, magnetic fields, heat or sound ata level that could damage humans, animals orobjects, even at very close range. The robotshould not cause interference with TVs, radiosor radio-telephones. To minimize legal liabilityexposure, the manufacturer will need to docu-ment and demonstrate through exhaustivetesting that the robot’s mechanical, electronicand software systems have been designed andbuilt to safely handle every possible operating
contingency.Naturally, the robot should perform its vacu-
uming task at least as effectively as an aver-age human. Speed of vacuuming is not likelyto be critical, but thoroughness will be. Cover-age of corners, edges and "nooks and cran-nies" will be especially important.
Finally, notwithstanding all of the above,the robot’s development, manufacturing andwarranty costs must be kept to a minimum.Though it is not clear how much people wouldbe willing to pay for the convenience (and pres-tige) of a robot vacuum cleaner, most high-endconsumer appliances sell for less than U.S.$3000. In addition, the robot will have to offerequal or better price/performance than othercompeting automatic vacuuming products.
Proposed Configuration
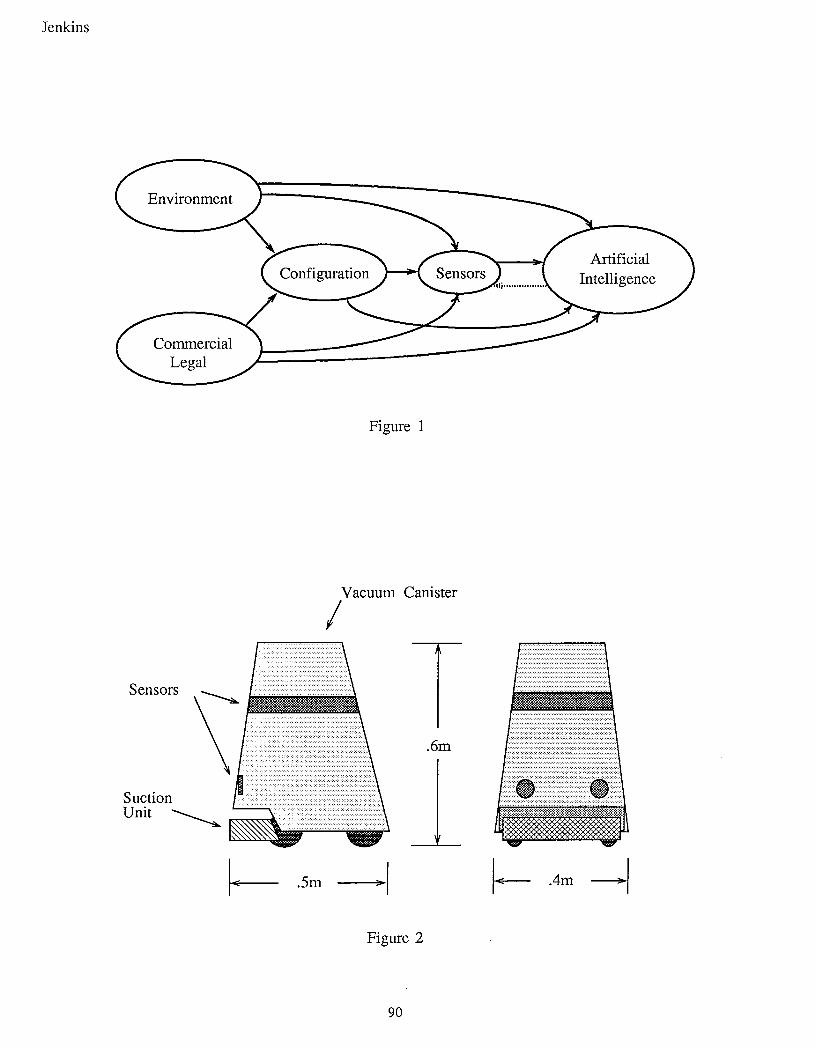
Many possible robotic system configura-tions are possible, ranging from colonies ofvacu-roaches to a fully anthropomorphic robo-maid. The approach advocated here is for asingle compact wheeled robot specificallydesigned for household vacuuming. It is sub-mitted that this configuration offers the bestcompromise between cost, practicality, andconsumer acceptance. A sketch of a possibleimplementation iS shown in Figure 2.
The robot would be capable of operatingcompletely autonomously, with all power andcomputation on-board. To maneuver undertables and into confined spaces, the robotshould be as compact as possible, though vac-uum system requirements and existing batterytechnology would limit the minimum size andweight. It would have a single charging-dock"home base" that could also be used as a diag-nostic platform by a technician. Limited controlof the robot would be available through a hand-held device similar to a TV remote controller.Robot-to-human communication would bedone using speech generation and simple indi-cator lights.
For reasons of cost and complexity, no stair
86
Jenkins
climbing capability is proposed. If the house-hold contains step-ups or split-level stairs,ramps would be need to be installed. Multi-story dwellings would require either multiplerobots or a specialized transport cart.
Normal operation of the robot would, super-ficially, be simple. When first installed, therobot would automatically explore its surroun-dings to generate an internal world model,which would then be used to plan vacuumingpaths. Subsequently, either on a regularschedule or when specifically commanded bythe owner, the robot would perform its vacuum-ing chores. Vacuuming would be accomplishedin one pass if possible, but a multiple passapproach would be acceptable.
Sensor Requirements
The choice of sensors will drive both thehardware and software requirements, and willhave the most effect on the overall productioncost of the robot. It is argued that the bestway to guarantee coverage, reliability and safe-ty for the lowest overall cost is to use manyredundant, low-cost sensors.
Some sensors would be used for mapping,position estimation, obstacle avoidance andcollision detection. Likely candidates would bethe usual: ultrasonic sonar, passive light detec-tion, reflective IR, pyro-IR, wheel odometers,and a compass system. If navigation markersare used, they may require a specialized sen-sor. Most important, though, would be a com-prehensive bumper system capable of detect-ing the direction and location of any contactwith the exterior of the robot.
Other sensors would be necessary to copewith operational contingencies. These wouldinclude drop-off detectors, inclinometers, mois-ture indicators, a lift detector, a vacuum inletmicrophone, an external temperature sensor, aremote-control receiver, and a charging-dockhoming device. Any external openings wouldrequire intrusion detectors.
Self-monitoring would necessitate internal
state sensors such as motor ammeters, bat-tery charge indicators, a dust bag fullness sen-sor, an internal smoke/ozone detector, andtemperature sensors for the motors, electron-ics and batteries. Special sensors would beneeded to detect unauthorized tampering ordisassembly.
Passive vision and laser range-finders are,at the present time, too expensive for consider-ation. A structured-light sensing system maybe cost-effective if the light intensity could bekept at a safe level. External microphonescould be used to detect large or unexpectedchanges in the ambient noise level, but thevacuum-system and environmental noisewould probably preclude their use for speechrecognition, or even speaker identification.
Last, but not least, many of the sensors willneed to be self-calibrating and/or self-testingand/or fail-safe. If any sensor has failed, or isoperating outside its expected limits, therobot’s processor should be aware of the situa-tion. The robot should be able to operate (orshut down) safely with one or more of its sen-sors inoperative.
AI Requirements
Based upon the foregoing configuration andoperational assumptions, the robot’s AI soft-ware and hardware must be able to: 1) Createand maintain an internal model of its house-hold; 2) Plan and execute an efficient vacuum-ing path; 3) Respond to operational contingen-cies and, 4) Diplomatically interface with itsowner.
Since the robot will be spending most of itslife in the charging-dock, it will have a consid-erable amount of time to reason about its envi-ronment and plan its operations. Thus the AImethods for modeling and planning can beselected for completeness rather than time-efficiency. However, contingency handling anduser-interface will usually require real-timeresponse.
87
Jenkins
Exploration and Mapping
Likely, the most intellectually challengingAI development problem will be getting therobot to autonomously build and maintain auseful model of its environment.
During the initial exploration phase, therobot will have to perform real-time fusion andinterpretation (or logging) of the often ambigu-ous and contradictory data from its many exter-nal sensors. It will need to determine where itis, where it has been and where it still needsto explore. Immediate creation of a "map"would not strictly be necessary as long as therobot avoids getting lost.
For its modeling, the robot will have to dis-tinguish between vacuumable floor space, for-bidden space, and various obstacle types. For-bidden space would include outdoor areas aswell as special areas within the household.Obstacle types will range from permanent(walls, stairs) to variable (doors) to static(cabinets) to moveable (chairs) to temporary(toys) to mobile (humans, pets). The situationwill be further complicated if the environmenthas ramps coexisting with steps and stairways.
Finally, the robot will need to constantlyupdate the model to allow for the inevitablechanges in the hofisehold. Ideally, new sensordata would be acquired and logged during nor-mal vacuuming, though separate exploratoryexcursions would be acceptable. This datacould be integrated into the mapping and plan-ning while the robot is recharging.
Path Planning and Execution
Compared to mapping, planning a vacuumingpath is relatively easy: the planner need onlyensure that all the vacuumable space is cov-ered. To minimize time and battery usage, thepath should be as short as practical, but thereis no need to eliminate redundant coverage.The path should have some edge overlap toallow for positioning errors. A more difficultproblem is determining how to maneuver thevacuum suction unit into confined areas.
Assuming adequate modeling of the envi-ronment, execution of the vacuuming task is, intheory, some variation of navigation and path-following among obstacles. As with the explo-ration phase, it is important that the robotalways be able to find its charging-dock.
Operational Contingencies
Of course, in addition to its "normal" opera-tion, the robot must be able to handle variousreal-time contingencies. This will probably bethe most time-consuming software develop-ment problem; the sheer number of possibili-ties (and combinations) is daunting.
Some contingencies would need a response,but would not be time-critical. They include:owner-commanded return-to-base while vacu-uming or exploring; unable to determine loca-tion in household; obstacle(s) blocking path;room on vacuuming path is inaccessible; interi-or door is partly opened; charging-dock notaccessible; charging-dock not charging; vacu-um dust bag is full; battery charge getting low;sensor temporarily inoperative; sensor failuresuspected; known sensor failure; high motortemperature; tampering sensor activated.
Other problems will require an immediatedecision and response. A few possibilitiesare: emergency stop from remote controller;unexpected bumper hit; object intrusion into anexternal opening; unexpected drop-off indica-tion; tilt angle outside normal limits; movingobstacle approaching rapidly; drive wheel(s)stuck; drive wheel(s) off the ground; moisturesensor activated; object trapped in vacuuminlet; sudden change in the ambient noise,light or temperature level.
Clearly, there are many, many other possi-bilities. Consider also that multiple problemsmight occur simultaneously, and that new prob-lems could appear while the robot is trying tomanage previous ones. In some cases, simplystopping the robot is not enough -- indeed,that may be the worst action to take. Deliber-ate, intelligent response is required.
88
Jenkins
Operator Interface
Perhaps the most interesting area of AIdevelopment will involve facilitating therobot’s relations with its human masters.
Since it is assumed that the robot’s ownerswill be technically naive, poorly trained andpossibly malevolent, the robot will have to domore than simply follow commands enteredinto the remote controller. Based on the con-text of its situation, the robot will need to intel-ligently interpret commands and act appropri-ately. If necessary, it could use speech gener-ation or other means to provide assistance tothe owner. However, it should never respondto commands or request help in a way thatwould confuse, aggravate or frustrate a well-intentioned human. Nonetheless, the robotmust not permit itself to be operated in a man-ner that could damage it either externally orinternally, and it should not allow itself to beguided (or goaded) into any forbidden area.
Through it all, the robot-human interfacewill have to give new meaning to the phrase"user-friendly".
Conclusion
All things considered, what might bethought of as a simple task in a relativelybenign domain is in fact quite demanding ofrobotic and AI technology. Obviously, choos-ing a different system configuration thandescribed above could result in differing AIrequirements. But whatever approach is used,the practical and commercial requirements ofthe real world will remain.
89
Jenkins
Environment
Configuration SensorsArtificial
Intelligence
CommercialLegal
Figure 1
Vacuum Canister
/iiiiiiiiiiiiiii!i iiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii,
Sensors
SuctionUnit ~~ ::i::. ~
.6m
Figure 2
90