Embed Size (px)
Citation preview

A model of Caterpillar Locomotion Based on Assur Tensegrity Structures
In the supervision of:
Prof. Shai OfferSchool of Mechanical Engineering, Faculty of engineering, Tel-Aviv University.
Dr. Ben-Hanan UriDepartment of Mechanical Engineering, Ort Braude College, Karmiel.
With collabaration of:
Prof. Ayali AmirDepartment of Zoology, Faculty of Life Sciences, Tel Aviv University.
Orki Omer

Overview
» Biological background
» Previous work
» Assur Tensegrity structure
» The caterpillar model
» Results and discussion

Biological background
Abdomen
Prolegs
Thorax
True legs
Head
Caterpillars do not have rigid segments. Instead they have soft body.
The internal pressure of the hemolymph within the body provides a hydrostatic skeleton.

The biological caterpillar has a complex musculature.
Each abdominal body segment includes around 70 discrete muscles !!
The major abdominal muscles in each segment are:1. The dorsal longitudinal muscle - DL12. The ventral longitudinal muscle - VL1
VL1
DL1
Antecostae
Eaton, J. L., 1988. Lepidopteran Anatomy. 1st edition, John Wiley, New York.
Biological background

Biological background
Caterpillars have a relatively simple nervous system. Yet, caterpillars are still able to perform a variety of complex movements.
Mechanical properties of the muscles are also responsible for some of the control tasks. (Woods et al., 2008)
Brain
Ganglions
Woods, W.A., Fusillo, S.J., and Trimmer, B.A., 2008. "Dynamic properties of a locomotory muscle of the tobacco hornworm Manduca sexta during strain cycling and simulated natural crawling". Journal of Experimental Biology, 211(6), March, pp. 873-82.

Biological background
During motion, at least three segments are in varying states of contraction.
The primary mode of caterpillar locomotion is crawling.
Crawling is based on a wave of muscular contractions that starts at the posterior end and progresses forward to the anterior.

Previous work
A caterpillar robot that is assembled using two types of modules:
1. Joint actuation modules 2. Adhesion modules.
Wang et al. (2008)
A computer simulation of a multi-body, caterpillar like, robot. The robot was assembled using a series of actuated Stewart-platform.
Stulce (2002)Rigid bodies No softness
Wang, W., Wang, Y., Wang K., Zhang, H., and Zhang, J., 2008. “Analysis of the Kinematics of Module Climbing Caterpillar Robots”. Proceeding of 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 84-89.Stulce J. R., 2002. “Conceptual Design and Simulation of a Multibody Passive-Legged Crawling Vehicle”. PhD Thesis, Virginia Polytechnic Institute and State University, Department of Mechanical Engineering

Previous work
Conventional control Methods are ineffective
Near-infinite degrees of freedom
Trimmer et al. (2006)
A caterpillar model using soft and deformable materials (silicone) and actuated using shape memory alloys wires (SMA).
The authors did not report results.
Trimmer B., Rogers C., Hake D., and Rogers D., 2006. “Caterpillar Locomotion: A New Model for Soft-Bodied Climbing and Burrowing Robots,” 7th International Symposium on Technology and the Mine Problem.

Tensegrity
Tension + Integrity
“ Islands of compression inside an ocean of tension ” (Fuller, 1975).
Definition
Air – Compressed element Envelope – Tensioned element
Fuller, R. B., 1975. Synergetics—Explorations in the Geometry of Thinking. Macmillan Publishing Co.

Tension + Integrity
Definition
Tensegrity
“ A tensegrity system is a system in a stable self-equilibrated state comprising a discontinuous set of compressed components inside a continuum of tensioned components ” (Motro, 2003).
Struts – Compressed elementsCables – Tensioned elements
Motro, R., 2003. Tensegrity: Structural Systems for the Future. Kogan Page Science.

Tensegrity structures are usually statically indeterminate structures
Tensegrity
(a) Human spine (b) Cytoskeleton
In Nature
Ingber, D.E., 1998. "The Architecture of life", Scientific American, 278(1), January ,pp. 48-57.
Previous work
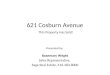
Rieffel et al. (2010)
A 15-strut, highly indeterminate tensegrity model, inspired by the caterpillar structure.
Using of Artificial Neurons Networks (ANNs) for control. Locomotion does not resemble caterpillar crawling.
Conventional control methods are ineffective
Indeterminate structure
Rieffel J.A., Valero-Cuevas, F. J., and Lipson, H., 2010. "Morphological communication: exploiting coupled dynamics in a complex mechanical structure to achieve locomotion". Journal of the Royal Society interface, 7(45), April, pp.613-621.

Shape Change Self-stress forces must be maintained during motion
Sultan C. and Skelton R. E., 2003 "Deployment of tensegrity structures“, International Journal of Solids and Structures, 40(18), September, pp. 4637–4657.van de Wijdeven J. and de Jager B., 2005 "Shape change of tensegrity structures: design and control“, in American Control Conference.
Equilibrium manifoldFinal configuration
Initial configurationEquilibrium path
(b)(a)
Sultan and skeleton (2003)
The method is based on the identification of an equilibrium manifold.
Van de Wijdeven and de Jager (2005)
The nodal positions of the tensegrity structure are found at every sub-shape by solving a constrained optimization problem.
Motion is divided into many steps

Assur Trusses
Definition
Assur truss Not an Assur truss
An Assur truss is a determinate truss, in which applying an external force at any joint, results in forces in all the rods of the truss.
√ X

Assur Trusses In general - determinate trusses cannot have self-stress
Assur trusses have a configuration in which there is:
1. An infinitesimal mechanism 2. A single self-stress in all elements.
This configuration is termed singular configuration (Servatius et al., 2010)
BC
A
O1 O2O3
BC
A
O2
O3O1
Singular configuration Generic configuration
Servatius, B., Shai, O., and Whiteley, W.,2010. “Geometric properties of Assur graphs”. European Journal of Combinatorics, 31(4), May, pp. 1105-1120.

Assur Tensegrity
Tensioned elements Compressed elements
CablesStruts
Assur Tensegrity structure is a statically determinate structure
Assur truss in a singular configuration can turn into tensegrity structure.

Shape change of Assur Tensegrity
it is possible to make any Assur truss configuration into a singular one simply by changing the length of any one of its ground elements
Shai O., 2010. "Topological Synthesis of All 2D Mechanisms through Assur Graphs" in Proceedings of the ASME Design Engineering Technical Conferences.

Shape change of Assur Tensegrity
The algorithm:(Bronfeld, 2010)
Bronfeld A., 2010 "Shape change algorithm for a tensegrity device," M.S. thesis, Tel-Aviv University, Tel-Aviv, Israel.
Activate the device controllers.
One ground element is defined a the force-controlled element. All other elements are position-controlled elements.
For the force-controlled element select a desired force in. For the position controlled elements generate a desired trajectory.

Caterpillar model
CablesStrut
Bars
Each caterpillar segment is represented by a 2D tensegrity triad consisting of two bars connected by two cables and a strut.

Leg
Caterpillar model
Parameters of each segment:
Mass : 0.182 (g)Height : 5 (mm)Length : 4.55 (mm) (in rest)
The complete model consists of eight segments connected in series.

Caterpillar model
Caterpillar Model Biological caterpillarUpper cable DL1
Strut Hydrostatic skeletonLower cable VL1
Bar Antecostae
VL1
DL1

Area conservation
The internal air cavity that can be emptied constitutes 3-10% of body volume (Lin et al., 2011)
Lin H. T., Slate D. J., Paetsch C. R., Dorfmann A. L. and Trimmer B. A., 2011 "Scaling of caterpillar body properties and its biomechanical implications for the use of hydrostatic skeleton“, The Journal of Experimental Biology, 214(7), April , pp. 1194-1204.
g
g
𝜑𝐵 𝜑𝑆
Bending Shearing

Area conservation
Lin H. T., Slate D. J., Paetsch C. R., Dorfmann A. L. and Trimmer B. A., 2011 "Scaling of caterpillar body properties and its biomechanical implications for the use of hydrostatic skeleton“, The Journal of Experimental Biology, 214(7), April , pp. 1194-1204.
𝑀 𝑖=−𝑐 ∙𝜑𝑆
Ф2Ф1
M M
Internal toque:
The internal torque enables a small (but not negligible) shear angle
The internal air cavity that can be emptied constitutes 3-10% of body volume (Lin et al., 2011)

Control Scheme
Level 1Central Control
Level 2 localized control
Leg Controllers
Cable Controllers
Strut controllersGr
ound
co
ntac
t se
nsor
High level control
Low level control
Brain
Hydrostatic pressure
Ganglia
Muscle behavior
Leg behavior

Low Level Control
Impedance Control:
The biological caterpillar muscles have large, nonlinear, deformation range and display viscoelastic behavior (Woods et al., 2008)
Cables Controller Muscles behavior
𝐹 0 ,𝑘𝑙 ,𝑣 𝑇 𝑐𝑎𝑏𝑙𝑒
𝑇 𝑐𝑎𝑏𝑙𝑒=−𝐹 0
2+𝑘 ( 𝑙−𝑙0 ) −𝑏𝑣
Initial tensionStatic term
Damping term
Output tension
Woods, W.A., Fusillo, S.J., and Trimmer, B.A., 2008. "Dynamic properties of a locomotory muscle of the tobacco hornworm Manduca sexta during strain cycling and simulated natural crawling". Journal of Experimental Biology, 211(6), March, pp. 873-82.

Cables Controller Muscles behavior
Low Level Control
Cable controller𝑙 ,𝑣 𝑇 cable
High Level Command (0 - 1)
00.10.20.30.40.50.60.70.80.91.0 So
ft an
d re
laxe
d ca
ble
Stiff and shrunken cable
Nerve Stimulation
High Level Command

Cables Controller Muscles behavior
Cable controller𝑙 ,𝑣 𝑇 cable
Low pass filter
Low Level Control
High Level Command (0 - 1)
The caterpillar muscles develop force slowly (Woods et al., 2008)
Causes slower cable reaction
Woods, W.A., Fusillo, S.J., and Trimmer, B.A., 2008. "Dynamic properties of a locomotory muscle of the tobacco hornworm Manduca sexta during strain cycling and simulated natural crawling". Journal of Experimental Biology, 211(6), March, pp. 873-82.

Low Level Control
The internal pressure in caterpillars is not isobarometric and the fluid pressure changes do not correlate well with movement (Lin et al., 2011)
𝐹 𝑠𝑡𝑟𝑢𝑡=𝐹 0−𝑏𝑣
Initial forceDamping term
Output force
.
Strut Controller Internal pressure
Lin H.T., Slate D. J., Paetsch C. R., Dorfmann A. L. and Trimmer B. A., 2011. “Scaling of caterpillar body properties and its biomechanical implications for the use of hydrostatic skeleton”. The Journal of Experimental Biology, 214(7), April, pp. 1194-1204.
𝑇 𝑐𝑎𝑏𝑙𝑒=𝐹 0
2+𝑘 (𝑙− 𝑙0 ) −𝑏𝑣

Shape change Without external forces
the cables assume exactly the virtual lengths :
𝑙1=𝑙0 ,1 ,𝑙2=𝑙0 ,2
𝜑𝑏=sin−1( 𝑙0 , 1− 𝑙0 , 2
2h ) ,𝑙𝑠=𝑙0 , 1+ 𝑙0 , 2
2
describing the shape of the triad by and :

Shape change Softness
𝐹 𝑒
𝑙𝑠𝜑𝐵𝑙𝑠𝐹 𝑒
𝜑𝐵𝑙𝑠
𝑀 𝑒
Axial force Bending torque Bending force
As long as the external load is within its limits, the initial force within the segment doesn’t influence segment stiffness

Low Level ControlLeg Controller Leg behavior
Caterpillar legs are used as support rather than levers. When a leg touches the ground it cannot be lifted until it is actively
unhooked and retracted.(Lin and Trimmer, 2010)
Leg controller
Leg position
High Level Command (0 , 1)
Trigger when touching the ground
Ground contact sensorLeg locking
Lin H. T. and Trimmer B. A., 2010. "The substrate as a skeleton: ground reaction forces from a soft-bodied legged animal“, The Journal of Experimental Biology, 213(7), April, pp. 1133-1142.

High Level ControlLevel 1 control Brain (CPG)
H8 H7 H6 H5 H4 H3 H2 H1
Crawling direction
Posterior side
Anterior side
Step 3
Step 4
Step 2
Step 1
Step 5
Step 6
Step 9
Step 7
Step 8
» coordinates motion» activate relevant segments in each step
Swing phaseStance phase

High Level Control
H8 H7 H6 H5 H4 H3 H2 H1 Posterior side
Anterior side
» A new stride starts before the previous stride ends.
» The transition from step to step is triggered by the contact of the legs with the ground.
» In each step, several segments are in various stages of contraction
» Each stride issues the same set of step commands.
L8 L7 L6 L5 L4 L3 L2 L1 L0
Level 1 control Brain (CPG)

High Level ControlLevel 2 control Ganglia
responsible for fitting motion to the terrain shape:
Mode I: Adjusting a segment in stance phase to the terrain shape
Mode II: Adjusting a segment in swing phase to the terrain shape
Mode I:
ࢻ ࢻࢼ�� ࢼ��ࢻ
ࢼ��

High Level ControlLevel 2 control Ganglia
Mode II:
0.7
0.7 0
0.4
+ =
0.9
0.5
Level 1 commands
Stance commands
Output commands
responsible for fitting motion to the terrain shape:
Mode I: Adjusting a segment in stance phase to the terrain shape
Mode II: Adjusting a segment in swing phase to the terrain shape

Results
Stage 1.Stage 2.
Stage 3.𝑳𝟎
𝑯𝟏𝑯 𝟒
𝑳𝟖
Crawling stages

Results Segment length
5 6 7 8 9 10 11 12 13 14 15
3
4
5H8
5 6 7 8 9 10 11 12 13 14 15
3
4
5H7
5 6 7 8 9 10 11 12 13 14 15
3
4
5H6
5 6 7 8 9 10 11 12 13 14 15
3
4
5H5
5 6 7 8 9 10 11 12 13 14 15
3
4
5H4
5 6 7 8 9 10 11 12 13 14 15
3
4
5H3
5 6 7 8 9 10 11 12 13 14 15
3
4
5H2
5 6 7 8 9 10 11 12 13 14 15
3
4
5H1
Seg
men
t len
gth
(mm
)
Time (s)
Time (s)
Segm
ent l
engt
h (m
m) H1
H2
H3
H4
H5
H6
H7
H8
SegmentStance Length (mm)
Min length (mm)
Length change
)%(Stance time (s)
Swing time (s)
Step time (s)
Duty factor)%(
H1 4.55 3.07 32 1.40 0.76 2.16 35H2 4.64 3.08 34 1.26 0.90 2.16 41H3 4.38 3.06 30 1.17 0.99 2.16 46H4 4.42 3.06 31 1.15 1.01 2.16 47H5 4.65 3.05 34 1.20 0.96 2.16 44H6 4.24 3.05 28 1.10 1.06 2.16 49H7 4.36 3.06 30 1.14 1.02 2.16 47H8 4.35 3.07 29 0.97 1.19 2.16 55
Average 4.45 3.06 31 1.17 0.99 2.16 46

Results Crawling parameters
Stride Length (mm)
Duration of one crawl (s)
Velocity (mm/s)
Biological caterpillar 8.52 2.78 3.03
Model caterpillar 4.64 2.71 1.93
-50 -48 -46 -44 -42 -400
1
2
3
4
5
6
C.M. positoin - X axis (cm)
C.M
. pos
ition
- Y
axi
s (c
m)
C.M positionStart of phase 1Start of phase 2Start of phase 3End of stride
Start of phase 3of the i th stride
Start of phase 1of the i+1 th stride
Start of phase 2of the i+1 th stride
(In blue circle)
End of stride i(In red square)
Stride
Stride
Crawling direction

Results Dynamics
Tetanic stimulus of a caterpillar muscle
Caterpillar Model Biological caterpillar
Activation of a model cable
0.27 s 50% of peak force 0.26 s0.41 s 80% of peak force 0.56 s
Woods, W.A., Fusillo, S.J., and Trimmer, B.A., 2008. "Dynamic properties of a locomotory muscle of the tobacco hornworm Manduca sexta during strain cycling and simulated natural crawling". Journal of Experimental Biology, 211(6), March, pp. 873-82.

Results Dynamics
The maximum change in cable forces is only 13.8% relative to resting force
5 6 7 8 9 10 11 12 13 14 150
10
20
30
40
50
60
70
Time (s)
Cab
les'
For
ce (m
N)
Cable 1 Cable 2 Resting Force Min/Max Forces
Maximum change of cableforces relative to the restingforce is 13.8%
The change of cable forces in H3 while crawling

Results Area conservation
5 10 15 200
50
100
150
200
Time (s)
Cat
erpi
llar a
rea
(mm
2 )
Min area = 157.3 mm2
The change in caterpillar area is 6.14%
Max Area = 167.6 mm2
g is only 6.14%
Minimum:
Maximum:
Time
Cate
rpill
ar a
rea
(mm
2 )
The change in caterpillar area while crawling 6.14%
Internal pressure
The model was tested with various levels of internal pressure. As long as is above a certain threshold, crawling is independent of the magnitude of internal pressure
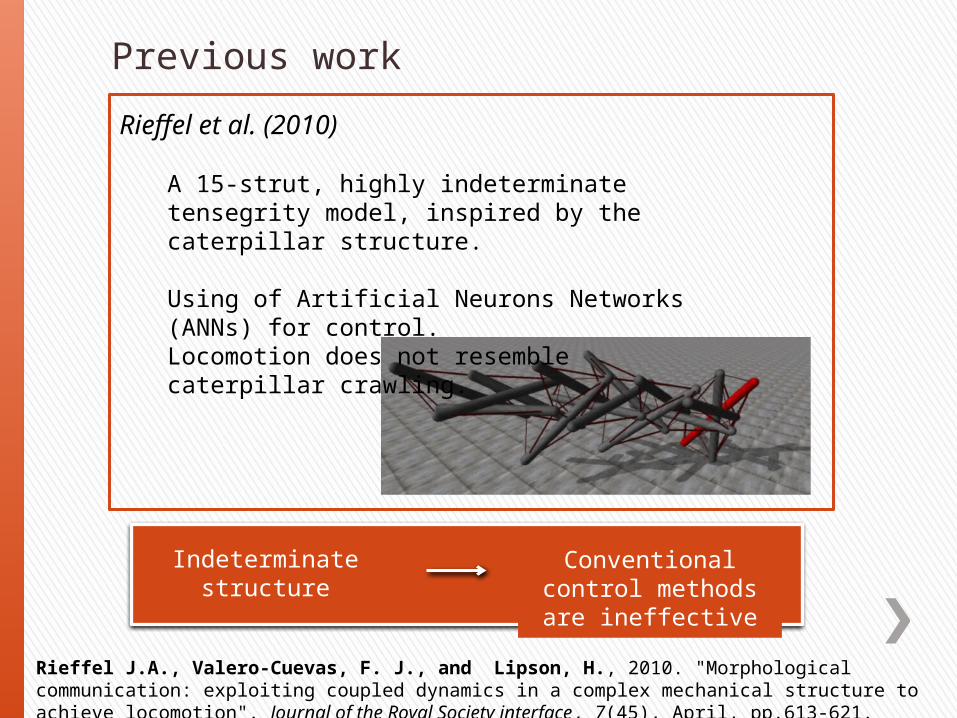
Results Different terrains

Discussion Assur tensegrity + Impedance control
» Stabilityself-stress of the tensegrity structure is always maintained.
» SoftnessTensegrity structures have natural high compliance (softness).Using impedance control, this degree of “softness” can be changed and controlled.
» SimplicityStatically determinate structure & Independent controllers createssimple and intuitive shape change.

Discussion Assur tensegrity + Impedance control
Soft robot Rigid robot
Assur tensegrity

Discussion
The model exhibits several characteristics which are analogous to those of the biological caterpillar:
» Internal PressureDuring growth, body mass is increased 10,000-fold while internal pressure remains constant. In the same way, our model is able to maintain near constant internal forces regardless of size.
» Simple nerve systemMechanical properties of the muscles are also responsible for some of the control tasks. Our model shows that using impedance control for each cable also simplifies the high level control.
» Crawl StagesThe model has demonstrated that effective crawling requires three different stages. Trimmer et al. found kinematic differences between three anatomic parts of the caterpillar.

Discussion
The model exhibits several characteristics which are analogous to those of the biological caterpillar:
» Stride LengthThere is a discrepancy between the stride length of the model and that of the biological caterpillar.
» Stride DurationThe duration of one stride are comparable in both the model and the biological caterpillar.
» Slow Muscle reactionThe caterpillar muscle develop force slowly. Our model show that adding the LP filter, which makes the cable to react slower, ease the high level control and makes the motion smoother

Discussion
The model suggests some characteristics of the biological caterpillar:
» Locomotion energyThe model shows that cables’ force doesn’t significantly change while the caterpillar is in motion. It suggests that Caterpillars don’t invest considerably more energy while crawling than while resting.
» Ground reactionsThe model schedule the motion using signals from the legs when they touch the ground. It suggests that the biological caterpillar also uses ground reaction to coordinate its movements.

Future Research
» Improving the existing model
» Expanding the model to a three dimensional model.
» Building a mechanical model.
Future research can be made in three directions:

Thank You!

potential energy of the system: Δ𝑈=−∫𝑙0
𝑙 𝑓
𝐹 (𝑙 )𝑑𝑙
Choosing triad configuration
If the system is in stable equilibrium, the potential energy function is at its minimum point.
Therefore,to get a stable system, any shift from equilibrium must result in cable lengthening and\or strut shortening.
(a) (b)
Two options:

ݒ ൌ���ή��ଶܤݒ
ݒ
ݒ
� ෝ��� �ෝ��
�critical � �ෝ��
real � �ෝ��
� Ȁ�ݐƸ
� �ෝ��
�ଵǡ��ଶǡ��ଷ
� Ȁ� �ෝ���ݐƸ
4 bar mechanism(In rigid lines)
𝑪 𝑩 𝑨
Tested element(In dashed line) 𝜔
𝑶𝟏𝑶𝟑 𝑶𝟐
Choosing triad configuration

� Ȁ�ݐƸ
lengthen
shorten
�ଵǡ��ଶǡ��ଷreal � �ෝ�� critical � �ෝ��
� �ෝ��� Ȁ� �ෝ��� �ෝ���
�ݐƸ
𝑪 𝑩 𝑨
𝜔𝑶𝟏𝑶𝟑 𝑶𝟐
Choosing triad configuration