Embed Size (px)
Citation preview

Power Electronics for Electric Drive Vehicles
Fall 2013
1

2
• Co‐developed and maintained by multiple universities• USU: Prof. Regan Zane (lead for 2013)• CU‐Boulder: Prof. Dragan Maksimovic• University of Cantabria, Spain: Prof. Francisco Azcondo
• Content provided by all campuses• Lectures, assignments, supplementary video and materials
• Local support: office hours, grading, location specific details• Benefits
• Course content maintained relevant and up‐to‐date• Leading experts brought in from around the world• Online content available to all students for review• Discussions exchanged across campuses via course blog
Course Offered Jointly

3
CU‐Boulder Instructor: Professor Dragan Maksimovic
• Office:• OT346, 3rd floor office tower• phone: 303‐492‐4863
• Office hours• Monday, Wednesday 1‐2:30pm
• Class blog• E‐mail: [email protected]
• Please use 5017 in the subject line

Materials and Textbook• Course website
– http://ecee.colorado.edu/~ecen5017/– Lecture slides & notes, assignments, additional materials
• Textbook– R. Erickson, D. Maksimovic, Fundamentals of Power Electronics, Springer 2001 (Chapters 1‐5); on‐line access available from CU network
• MATLAB/Simulink is required– Student version is sufficient
• Prerequisites– undergraduate circuits sequence, microelectronics,
Laplace transforms, linear systems
4

Assignments
5
• Weekly homeworks (11‐12 total), 50% of the grade
• Midterm exam (open book/notes, take‐home), 20% of the grade
• Final exam (comprehensive, open book/notes, take‐home), 30% of the grade
• All assignments and due dates posted on the course web site
• All work must be submitted via D2L system as a single, easily readable PDF file; use black‐an‐white scanning, reasonable file size
• Deadlines are enforced by D2L and are the same for all students, on‐campus and off‐campus
• Late work will not be accepted except in cases of documented emergencies

Assignment Policy
6
Homeworks
• You are encouraged to talk to other students taking the class about homework problems; collaboration is allowed
• Use the class blog to ask and answer questions
• You must turn in your own work. Copying someone else’s work is not allowed
Exams
• Take‐home, open‐book, open notes exams
• Absolutely no collaboration allowed in any form
Any policy violations would lead to severe consequences, starting with an immediate F in the class, for all parties involved

7

How to succeed in this course• Keep up: follow all materials available online• Actively participate: speak up in class, post questions and answers to blog– Class attendance is required
• Plan on a significant effort in the weekly homework assignments
• Review for the mid‐term and final exams similar to any other exam
• Plan on increased effort during the one‐week take home exams
8

Introduction• Objectives
– Architectures, modeling and simulations of electric drivetrains– Modeling, analysis and design of vehicle power electronics
9
• One of the four courses in Graduate Certificate in Electric Drivetrain Technology offered by UCCS

Course Outline• Transportation electrification• System overview
– Vehicle dynamics, MATLAB/Simulink modeling– Architectures of hybrid (HEV), plug‐in hybrid (PHEV) and electric vehicles (EV)– Rating and sizing of drivetrain components
• Electric drivetrain components: analysis, modeling, simulations and design considerations
– Battery systems, battery management electronics– Bidirectional DC‐DC converters– Inverters and AC motor drives– Battery chargers
• Complete system modeling and simulations
10

System Architectures, Modeling and Simulations
11
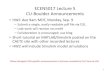
Top-level model of EV for use in ECEN 5017 course. Drivingcycle is a velocity-vs-time profile for the vehicle, operating on
flat ground. Driver uses gas pedal to track the reference velocity.
Top-Level EV Model
m
Vref
speeds
Forces
Iinv
Ebat
dist
Unit Conversion Scope
Electric VehicleDriver model
Driv ing cy cleRef erence Speed
Torque command(Gas & brake pedals)
Vehicle Monitoring
Vehicle Speed
• Vehicle dynamics, MATLAB/Simulink modeling• Architectures of hybrid (HEV), plug‐in hybrid (PHEV) and electric vehicles (EV)
• Rating and sizing of drivetrain components

Vehicle Subsystems
12
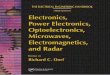
Vehicle Systems Model
Model for a sample vehicle system during driving cycle. Model consistsof Battery, DC-DC, Inverter, three-phase Permanent-Magnet AC
(PMAC) motor, drive shaft gearing, and vehicle tires
4
Fdrive
3
SOC 2
Iabc
1
Iinv
Tire
PMAC Motor: FunctionalMotor Drive Inverter:Functional
Gearing
EV Battery Model:Functional
DC-DC Converter:Functional
Vbus_ref
Bus VoltageReference
2
Vev
1
TcommandBattery Voltage
Battery Current
Rotor Phase Angle
Inv erter Input Current
DC Bus Voltage
Motor Input Power
Motor Torque
Wheel Torque
Wheel Angular Speed
Rotor Angular Speed
SimulinkModel View
Electrical Model View

Energy Storage System (Battery)
13
• An introduction to battery electro‐chemistry
• Types and characteristics of battery cells, energy, power, cycle life, calendar life, cost
• Cell charge/discharge characteristics, electrical circuit modeling
• Battery management system, cell balancing
• Modeling and simulations of battery systems
Battery dynamic modeling and control are covered in IDEATE courses at UCCSECE 5710: Modeling, Simulation, and Identification of Battery Dynamics (Fall)ECE 5720: Battery Management and Control (Spring)

Bidirectional DC‐DC Converter
14
• Introduction to switched‐mode power converters
• Steady‐state operation, analysis and simulations
• Introduction to power semiconductor switching devices: diodes, IGBTs, MOSFETs
• Modeling of losses and efficiency• Simulations
• This course provides a self‐contained introduction and covers additional topics specific to electric‐drivetrain applications
• Topics covered in more detail in ECEN 5797: Introduction to Power Electronics

AC Motor Drive
15
• An introduction to AC machine operation and models*
• Permanent magnet synchronous machine
• Induction machine• DC‐to‐AC inverter operation and controls
• AC drive modeling and simulations
* Topics covered in more detail in ECEN 5737: Adjustable Speed AC Drives offered in Spring 2014 at CU Boulder

Complete System Model and Simulations
16
Top-level model of EV for use in ECEN 5017 course. Drivingcycle is a velocity-vs-time profi le for the vehicle, operating on
flat ground. Driver uses gas pedal to track the reference velocity.
Top-Level EV Model
m
Vref
speeds
Forces
Iinv
Ebat
dist
Unit Conversion Scope
Electric VehicleDriver model
Driv ing cy cleRef erence Speed
Torque command(Gas & brake pedals)
Vehicle Monitoring
Vehicle Speed
• Integration of developed subsystem models into a complete vehicle model
• System evaluation and design considerations
Speed
Forces
Inverter current
Battery energy
The course includes

Transportation Electrification
17
Motivation
• Improve efficiency: reduce energy consumption
• Displace petroleum as primary energy source
• Reduce impact on environment
• Reduce cost
EIA:• Transportation accounts for 28% of total U.S. energy use
• Transportation accounts for 33% of CO2 emissions
• Petroleum comprises 93% of US transportation energy use

0 100 200 300 400 500 600-60
-40
-20
0
20
40
60
80
Pv [
kW]
time [s]
18
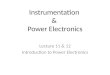
Example: US06 driving cycle
0 100 200 300 400 500 6000
20
40
60
80
100
v [m
ph]
Example: Prius‐sized vehicle
Vehicle speed [mph]
Propulsion power [kW]
10‐min8 miles

19
Average power and energy
0 100 200 300 400 500 600-60
-40
-20
0
20
40
60
80
Pv [
kW]
time [s]
Prius‐sized vehicle
Dissipative braking
Pvavg = 11.3 kW
235 Wh/mile
Regenerative braking
Pvavg = 7.0 kW
146 Wh/mile
0 100 200 300 400 500 6000
20
40
60
80
100
v [m
ph]

20
Conventional versus Electric Vehicle(Prius‐sized vehicle example)
Tank + Internal Combustion Engine (ICE)
Electric Vehicle (EV)Battery + Inverter + AC machine
Gasoline energy content12.3 kWh/kg, 33.7 kWh/gallon
Tank‐to‐wheel efficiency
20%
1.2 kWh/mile, 28 mpg
85%
0.17 kWh/mile, 200 mpg equiv.
Regenerative braking NO YES
Energy storage LiFePO4 battery0.1 kWh/kg, 0.8 kWh/gallon
Refueling 5 gallons/minute11 MW, 140 miles/minute
Level I (120Vac): 1.5 kW, <8 miles/hourLevel II (240Vac): 6 kW, <32 miles/hourLevel III (DC): 100 kW, <9 miles/minute
Cost
CO2 emissions (tailpipe, total)
12 ¢/mile [$3.50/gallon]
(0, 120) g CO2/mile[current U.S. electricity mix]300, 350) g CO2/mile
2 ¢/mile [$0.12/kWh]

Electric‐Drive Vehicle Technologies• Internal Combustion Engine (ICE) vehicle
– Gasoline powered only
• Hybrid Electric Vehicle (HEV)– Combination of a gasoline‐powered ICE and electric drive,– HEV efficiency improvements
• Regenerative braking• “Downsizing:” a smaller, more efficient ICE, relatively small battery• ICE operated around the most efficient operating point• No idling required when the vehicle stops, keep ICE off
• Plug‐In Hybrid Electric Vehicle (PHEV)– Same efficiency improvements as HEV– Larger battery for an all‐electric range
• Electric Vehicle (EV), All electric vehicle (AEV), (BEV)– No ICE, (much) larger battery
21

PHEV example, new EPA stickers
22
Chevy Volt
1720 kg62 kW (83 hp) ICE55 kW generator110 kW (149 hp) electric drive16 kWh Li‐Ion battery (175 kg)
65% usable, 35 mi EV range8 years, 100,000 miles warranty
MPGequivalent = Trip length [miles]
Total energy consumed [kWh]33.7 kWh/gallonx
EPA miles‐per‐gallon‐equivalent calculation for All Electric

EV example
23
Nissan Leaf
1527 kg80 kW (110 hp) electric drive24 kWh Li‐Ion battery
Cells: 140 Wh/kg300 kg battery pack(8 years, 100,000 miles warranty)

CO2 emissions and oil displacement study
24
Well‐to‐Wheel Analysis of Energy Use and Greenhouse Gas Emissions of PHEVs (2010 report by Argonne National Lab)

CO2 emissions Over Full LifetimePreparing for a Life Cycle CO2 Measure (2011 report by Ricardo)

Trends and Challenges• Paths to electrified (personal) transportation
– Hybrid electric vehicles (HEV)– Plug‐in hybrid electric vehicles (PHEV)– All electric vehicles (AEV, BEV)– Hydrogen + fuel cell electric vehicles (FCV)
• Electricity generation mix: shift to renewables• Challenges
– Batteries– Engineering of electric drivetrain components, including efficient, high‐density, reliable power electronics
– Charging infrastructure
26

A Vision: Renewable Sources + Battery Electric Vehicles
27
• Zero GHG emissions, no petroleum• High efficiencies are feasible: 80% grid‐to‐wheel• Challenges
• Battery technology: cost, cycle life, power and energy density• Efficient, reliably and cost‐effective drivetrain components• Need for charging infrastructure• Limited Pchg, long charge‐up times
Pchg