Embed Size (px)
Citation preview

Poster: BlueSense - Designing an extensible platform forwearable motion sensing, sensor research and IoT applications
Daniel RoggenUniversity of Sussex
Arash PouryazdanUniversity of Sussex
Mathias CilibertoUniversity of Sussex
AbstractWe present an extensible sensor research platform for
wearable and IoT applications. The result is a 30x30mmplatform capable of 500Hz motion and orientation sensingusing 98mW when logging the data. The platform can wakeup at programmed intervals using only 70uW in hardware offmode. A maximum 0.6ppm time deviation between nodes al-lows usage in a network for whole body movement sensing.1 Introduction
Our work is motivated by sensor-based human activityrecognition which is key to smart-assistive systems. It ad-dresses issues we experienced in prior work collecting largescale datasets for human activity recognition [7] and takesinto account experiences reported by other researchers. Thekey observations are: i) some applications require real-timerecognition and thus data streaming, whereas others performoffline analysis which requires data logging; ii) multiple sen-sors are generally improving recognition performance, thustheir recordings must be synchronised [4]; iii) using limb co-ordinates instead of raw motion data is well suited for finegesture recognition, which thus requires orientation sensing[8]; iv) some applications require high sample rate, espe-cially in sports [2]; v) activity recognition can benefit fromnovel sensors [5], and thus a platform should be extensible.
A secondary motivation is measurements over extendedperiods of time at low sample rate (e.g. once per day), whichis common in Internet of Things (IoT) applications. Insteadof hardware event detectors [9] we combine true hardwareoff with programmed wake-up through a real-time clock.2 Hardware
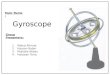
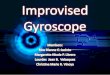
The platform (fig. 1) comprises an ATmega1284p micro-controller at 11MHz, 3V regulator and LiPo battery charger,Micro SD slot, a single-chip 3D accelerometer, gyroscopeand magnetometer (MPU9250), a coulomb counter, and
USB and Bluetooth 2 interfaces. Classic Bluetooth allowsenough bandwidth for real-time analytics. It has a one ofthe highest accuracy real-time clock (RTC) on the market(DS3232M), with ±5 ppm accuracy over the entire temper-ature range. It is used to timestamp the recordings of inde-pendent nodes. We measured the drift of the RTC to be lessthan 0.6ppm when nodes are at room temperature. Overall,the platform is 30x30mm. It accepts extension boards on topor bottom (fig. 2). One connector comprises the program-ming interface, SPI interface, regulated power, USB power,two GPIO which can also be used as ADC inputs, and anopen-drain line which can be used to wake up the systemfrom hardware off. This may be used to implement event de-tectors using low-power analog circuitry [9]. The other con-nector comprises the I2C interface, analog and battery powerand 5 GPIO pins, 3 of which can be used as ADC inputs.
True hardware off is achieved by turning off the powerregulator (LTC3553 in fig. 1). The system can wake up fromthis mode when the power button is pressed, when a real-time clock alarm occurs, or when a pin on the expansionconnector is pulled low. The logic to wake up the system(power logic in fig. 1) is powered by the battery directly.
30mm
30mm
+X
+Z
+Y
Figure 2. PCBs and node fitted with a 160mAh battery.
3 FirmwareThe firmware offers a terminal-based interface over USB
and Blueooth to setup the node and start and stop data ac-quisition. We designed the firmware to achieve high samplerate with low jitter. No operating system is used to min-imise overheads. However a comprehensive library abstractsthe user application from the hardware details. Most libraryfunctions related to I/O rely on interrupt routines to receiveor send data from or to a peripheral. The interrupt routinesstores or reads the data from memory buffers to which thelibrary functions called from user code can also access. TheSD card interface however is not interrupt driven and SDcard writes are blocking.

AuTmega1284p
LiPo
USB
Vbus
Vbus
Vbat
CPU
Vccio Vcc3V3out
I2C FT200XI2C-USB
D+D-
D+D-GND
VbusVccA VccB
Vcc
I2CBI2CA
I2C transl.TCA9406
RTCDS3232M INT#I2C
Vbat Vcc
VccVbat
I2C bus
I2C
Sens+Sens-
Coulomb ctrLTC2942 LTC3553
Pwr reg/chrgRegOnPBON#
Vbus
Vbat
Vbat
Power logicRTC wakeup
RTCIntCPUon
Pon
Filters
VccAVcc
Vcc
Vbat VccLDOout
I/O
Vcc AVcc
I/O
I/OAVccVccReset#
Ext1 / ProgRTCInt
VbusVcc
XIO/ADC3XIO/ADC7Reset# I2C
I2CSPI
VbatAVcc
Ext2
I/OI/O
XIO/ADC(2:0) XIO/AIN(1:0)SPI
USART1
I/O
I/O
USART0
UART
Ctrl
SPI
Int
MPU9250Motion sensor
RN41Bluetooth
uSD
Vcc
SPI
Figure 1. Extensible sensing platform for wearable and IoT applications.
Table 1. Power use in various modes.Logging Streaming Idle
500Hz 100Hz 500Hz 100Hz No conn. BT conn. Off98mW 94mW 200mW 184mW 18mW 92mW 70µW
Data logging uses an optimised a FAT32. Log files arepre-allocated contiguously on the SD card. This allows toemploy SD card “pre-erase” and “multi block writes” com-mands which allow streaming writes of data, without havingto regularly update the FAT entries and cluster link. Onlywhen a file is closed is the FAT updated to reflect the size ofthe file. With this we achieved 1KHz ADC sample rate withjitter less than ±30µS [5].
The motion sensor data is converted into orientationquaternions using a variation of Madgwick’s algorithm [3],where the corrective step using the accelerometer and mag-netometer is carried out at a fixed 12.5Hz. This allows tokeep the computation time below 1100µS and is instrumen-tal to achieve 500Hz motion sensing. We did not observeadverse effects thanks to the low noise of the gyroscope.
Timekeeping is obtained from a combination of an inter-nal AVR timer and the RTC. The AVR timer provides a timeresolution of 1ms. A 1Hz RTC signal is used to regularlyreset the AVR timer. This ensures that the timekeeping erroris bound by the RTC timekeeping accuracy.
4 CharacterisationWe minimised CPU power consumption by sleeping the
processor wherever busy-looping. In idle mode (i.e. the nodewaits for user commands), the dominant power contributionis the Bluetooth radio, which we minimised by modifyingthe inquiry and page scan window and duty cycling. Thisdecreased idle power by 19mW at the expense of slightlylonger discovery and connection time. In hardware off mode,the only components directly powered by the battery are thecoulomb counter, the RTC and the power-up logic. The typeof SD card used has a significant influence on power use dur-ing logging. Table 4 shows power use with a 32GB SamsungEVO+ SD card; using a 32GB SanDisk Extreme instead in-creased power use by 40mW.
5 ConclusionBlueSense offers a better tradeoff and versatility for wear-
able sensing applications compared to many other platforms
[6], inluding highly miniaturised ones [1] or commercialones (e.g. xsens, Shimmer, x-io technologies). True hard-ware off also allows usage in IoT applications.
An AVR processor was used to reduce development timeby exploiting our large existing code base. The firmwaredevelopment time was nevertheless significantly underesti-mated due to the highly specific needs of this platform re-quiring a large number of new software modules. A lessonlearned for embedded systems development is that a moremodern microcontroller could have been used (e.g. an ARMCortex-M) while incurring only a very limited increase indevelopment time. The platform will be open-hardware1.6 References[1] H. Harms, R. Winkler, J. Schumm, M. Kusserow, and G. Troester.
ETHOS: Miniature orientation sensor for wearable human motion anal-ysis. In IEEE Sensors, pages 1037–1042, 2010.
[2] M. Lapinski, E. Berkson, T. Gill, M. Reinold, and J. Paradiso. A dis-tributed wearable, wireless sensor system for evaluating professionalbaseball pitchers and batters. In Proc Int Symp on Wearable Comput-ers, pages 131–138, 2009.
[3] S. Madgwick, A. Harrison, and R. Vaidyanathan. Estimation of imuand marg orientation using a gradient descent algorithm. In IEEE IntConf on Rehabilitation Robotics, 2011.
[4] S. Munzner, P. Schmidt, A. Reiss, M. Hanselmann, and R. Stiefelhagen,Durichen. Cnn-based sensor fusion techniques for multimodal humanactivity recognition. In Proc Int Symp Wearable Computers, pages 158–165, 2017.
[5] A. Pouryazdan, R. J. Prance, H. Prance, and D. Roggen. Wearable elec-tric potential sensing: a new modality sensing hair touch and restless legmovement. In Proc. ACM Int Joint Conf on Pervasive and UbiquitousComputing: Adjunct, pages 846–850, 2016.
[6] D. Rodrıguez-Martın. A wearable inertial measurement unit for long-term monitoring in the dependency care area. Sensors, 13(10):14079–14104, 2013.
[7] D. Roggen, A. Calatroni, M. Rossi, T. Holleczek, K. Forster, G. Troster,P. Lukowicz, D. Bannach, G. Pirkl, A. Ferscha, J. Doppler, C. Holz-mann, M. Kurz, G. Holl, R. Chavarriaga, M. Creatura, and J. del R.Millan. Collecting complex activity data sets in highly rich networkedsensor environments. In 7th Int. Conf. on Networked Sensing Systems,pages 233–240. IEEE Press, 2010.
[8] T. Stiefmeier, D. Roggen, G. Ogris, P. Lukowicz, and G. Troster. Wear-able activity tracking in car manufacturing. IEEE Pervasive ComputingMagazine, 7(2):42–50, April-June 2008.
[9] F. Sutton, R. Da Forno, D. Gschwend, T. Gsell, R. Lim, J. Beutel,and L. Thiele. The design of a responsive and energy-efficient event-triggered wireless sensing system. In Proc Int Conf on Embedded Wire-less Systems and Networks, pages 144–155, 2017.
1http://github.com/droggen/BlueSense2