-
Position Sensorless Control of Switched ReluctanceMotor Based on
Numerical Method
Fei Peng, Jin Ye, and Ali Emadi,McMaster Institute for
Automotive Research and Technology (MacAUTO)
Electrical and Computer Engineering DepartmentMcMaster
University, Hamilton, Ontario, Canada
Email: [email protected]@[email protected]
Abstract-In this paper, a new position sensorless controlmethod
for switched reluctance motor drives is proposed. Rotorposition is
initially calculated based on the flux Iinkage-position-phase
current characteristics by numerical method. Then, a third-order
phase locked loop considering the acceleration variationis designed
to undermine the impact of current sampling noiseand numerical
residual error on the estimated rotor position.Simulation and
experimental results show that the proposed po-sition sensorless
control method has achieved sufficient accuracyin terms of position
and speed estimation.
Index Terms-Position sensorless control, Numerical method,Phase
locked loop, Switched reluctance motor (SRM).
I. INTRODUCTION
Switched reluctance motor (SRM) is an attractive candidateto
variable speed drive applications. Compared to the widelyused
brushless DC (BLDC) machine and induction machine(1M) drive
systems, SRM has features such as simple, robustand low-cost
structure, high reliability and satisfactory highspeed performance
[1].
A typical SRM drive system is shown in Fig. 1. Nor-mally an SRM
is driven by asymmetric half bridges. Currentcontroller is employed
to generate switching signals for theasymmetric half bridges
according to the current reference androtor position. The current
reference is either given by a speedcontroller or a torque
distributer. If the current reference comesdirectly from a speed
controller, flat top chopping current foreach phase is employed.
Due to the strong nonlinearity, insome cases, the flat top chopping
current regulation mightnot provide satisfactory performance.
Therefore, torque sharingcontrol is used to produce constant torque
[2]-[7].
According to Fig. 1, both the current controller and thetorque
distributer need the rotor position information. The
Fig. 1. A typical SRM control diagram.
978-1-5090-0737-0/16/$31.00 ©2016 IEEE
rotor position is often obtained through external sensors suchas
encoder, resolver, hall sensors or optical couplers. Thesesensors
increase the cost of the SRM system and reduce thesystem
reliability. In order to compete with the widely usedposition
sensorless controlled BLDC and 1M drive system interms of cost and
reliability, the sensorless control method forSRM drive has to be
developed.
There are two categories of position sensorless controlmethods
for SRMs: flux-linkage based methods and inductancebased methods.
Since phase inductance is a function of rotorposition, rotor
position is detected through injecting currentpulses to the
inactive phase in [8], [9]. Commutation happenswhen the injected
current peak exceeds a certain threshold.However, current injection
methods are limited at higher speed.In [10]-[14] the phase
inductance is measured through thecurrent and voltage on the active
phase, which relies on theinstant measurement of current
derivatives. Therefore, thismethod suffers from the measurement
noise. In [15]-[21], therotor position is detected based on flux
linkage-current-positioncharacteristics. The current observer or
flux observer or hy-brid observer can be designed to estimate the
rotor positionindirectly. In [22], [23] instead of comparing the
estimatedrotor position with the commutation angles, the estimated
fluxis compared with the commutation flux. The flux or
currentobserver methods work well at constant speed, but will
havesignificant error during acceleration and deceleration. In
[24],[25], rotor position is calculated directly based on flux
linkage-position-current characteristics with either lookup table
ornumerical method, which also suffers from measurement noise.
In this paper, a new position sensorless control methodfor SRM
is proposed. The new method is a combination ofdirect calculation
method and flux observer method. Rotorposition is firstly
calculated by numerical method through therelationship among
position, phase current and flux linkage.Then the motion of the SRM
including acceleration is modeledand a phase locked loop (PLL)
based on this model is designedto estimate the rotor according to
the numerically calculatedresults. The dynamic response of this
method is improvedthrough the motion model and the impact of
measurementnoise and residual error could be reduced through
parameterselection of the PLL. Both simulation and experimental
resultsare provided to verify the performance of the proposed
positionsensorless control method.
-
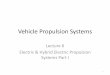
Fig. 2. Flux linkage profile of the studied SRM
II. MODEL OF SRM
By neglecting mutual coupling between phases, the phasevoltage
equation of SRM is given as:
_ R . d'¢(O, i)U w - w· ~ + dt (1)
where U w is the phase voltage applied on the phase winding;R w
is the winding resistance; '¢ is the flux linkage; 0 is therotor
position and i is the phase current. Due to its doublesalient
structure and saturation, '¢ is a nonlinear function ofboth i and
O. Fig. 2 shows the flux linkage profile of the studiedSRM in this
paper. i could be measured directly, but 0 is notavailable without
position sensor. In order to obtain the rotorposition, '¢ has to be
measured by integrating (1):
Fig. 3. 9 for different currents and its simplification.
III. PROPOSED SENSORLESS CONTROL METHOD
A. Position estimation
Since current is directly measured, 6i could be taken as
zero.Then, (3) could be written as
With the flux linkage profile shown in Fig. 2, ,¢, and
iobtained, 0 could be calculated either directly by lookup tableor
by numerical method. In this paper, numerical method isadopted to
calculate the rotor position.
Since '¢(0, i) is a function of 0 and i, in a small
neighbor-hood of a point in Fig. 2, there is
~(klk-l)=1P(O(klk-l),i(k)) (6)
(7)e(k) = () (klk) - () (klk - 1)
= BO I . (1P (k) - ~ (k Ik - 1))B'¢ i(k)
According to (4), there is
Since the controller is digitally implemented, the
estimatedposition for current sampling step comes from the
previoussampling step and is donated as 0 (k Ik - 1). Then the
corre-sponding estimated flux is obtained as
(3)
(2)
B'¢I . B'¢I6'¢ = -. . 6~ + - .60B~ ()=const BO i=const
where w is the angular speed, a is the angular acceleration.a is
determined by factors such as torque production, loadcondition,
load inertia, and fraction.
where () (k Ik) is the estimated rotor position of current
stepand e(k) is the estimation error.
9 = g~ is the iteration gain of the numerical calculation,whose
values at different currents are shown in Fig.3(a). Itis shown that
9 varies a lot with rotor position. Normally,the values are stored
in a lookup table for use. In order tosave time and space of the
digital controller, only the smallestvalue at each current is taken
as shown in Fig.3(b). Thisapproach will not lead to large errors
considering relativelyflat curve when the phase is turned on.
Smaller gain may leadto slower convergence, which will not affect
the stability ofthe numerical iteration.
(4)
(5)w=a
() - 0= ;~ I i=const . (1P - ~)where () is the estimated rotor
position near the real positionand "j; is the corresponding
estimated flux linkage.
The motion equations of the SRM is:
O=w
-
B. PLL design TABLE I. CALCULATING THE ESTIMATED POSITIONS AT
THE END OFSTART UP STAGE.
In order to reduce the impact of measurement noise andnumerical
residual error, a PLL is designed according to (5):
iJ == w+ koe~ == (} + kwe& == kae
(8)
If
Oa > Ob,Oa > Oe,Ob > Oeoa < Ob,Oa > Oe,Ob >
oeOa < Ob,Oa < Oe,Ob > OeOa < Ob,Oa < Oe,Ob <
Oeoa > Ob,Oa < Oe,Ob < oeOa > Ob,Oa > Oe,Ob <
Oe
Then
oa = 360 - 0a, 0e = 360 - 0eOa = 360 - Oa
Oa = 360 - Oa,Ob = 360 - ObOb = 360 - Ob
Ob = 360 - Ob, Oe = 360 - OeOe = 360 - Oe
(10)
Combing (10) and (7), the proposed position estimation
isobtained.
According to (8) and (5), the transfer function of the
errordynamics of the system becomes
where (), wand (} are the estimated position, angular speedand
angular acceleration respectively. e is the estimation error.
(13)()a == ()b + 120()b == ()e + 120
Therefore, a more accurate rotor position could be obtainedby
averaging the three calculated positions:
() == ()a + ()b + 120 + ()e + 240 (14)3
IV. DIGITAL IMPLEMENTATION
A. Start Up
Since there is no information about the rotor position
beforestart up, a start up sequence is required. On start up,
currentpulses are injected to all three phases of the SRM for a
shortperiod of time. The position estimators of the three phases
startto estimate rotor positions at the same time. Since Fig. 2
issymmetric between (0,180] and (180,360], the three
estimatorsshould only estimate the rotor position among (180,360]
inthis stage. After the estimated positions converges and
becomestable, the rotor position is calculated through the
estimatedvalues according to TABLE I.
There is known relationship among the three phase posi-tions,
which is:
(9)e 1Q s3 + kos2 + kvs + ka
() (k + 11 k) == () (k Ik - 1) +w(k Ik - 1) . T + ko . e (k) .
Tw(k + 11 k) == w(k Ik - 1) + (} (k Ik - 1) . T + kw . e (k) .
T&(k + 11 k) == (} (k Ik - 1) + ka . e (k) . T
(9) is a third order system and is stable as long as the gainsof
the PLL are positive.
Since the controller is implemented in digital processor, (8)has
to be digitalized:
C. Relationship Between Previous Sensorless Control Methods
The proposed position sensorless control method is similarto
some previous1Y proposed sensorless control method. Forexample, if
the g item is removed from (7), and the PLL isreduced to
secon~order, then the position estimator becomes:
¢ (klk -1) = 1jJ (0 (klk -1) ,i (k))e (k) = (1jJ (k) - ¢ (klk -
1))
() (k + 11 k) == () (k Ik - 1) +w(k Ik - 1) . T + ko . e (k) .
Tw(k + 11 k) == w(k Ik - 1) + kw . e (k) . T
(11)
which is a typical flux observer based position estimator.
With () obtained, the SRM could be started by keepingturning on
the active phase and turning off the inactive phases.
B. Low Speed
Since the flux linkage is calculated by (2) by integrationin a
open loop manner, it will lose its accuracy when speedis low and
the integration time is long. In this case, currentpulses are
injected into the inactive phases to help estimatingthe rotor
position and the position estimator of the active phaseis
disabled.
C. High Speed
After the SRM gets into higher speed, the calculated fluxlinkage
is accurate enough. In this stage, the pulse injection isstopped.
Rotor position is estimated by the active phase.
which is a numerical method based direct calculation method.
Therefore, the proposed method could be considered as
thecombination of observer based method and direct
calculationmethod.
If the third order PLL is removed, then (7) becomes
~ ~ B() I ( ~ )B(k)=B(k-1)+ 81jJ i(k)· 1jJ(k)-1jJ(k-1) (12)
V. SIMULATION RESULTS
Simulation is performed in MATLAB/SIMULINK to verifythe
effectiveness of the proposed position sensorless controlmethod.
Since speed control and torque control is not themain concern of
this paper, only current control is applied. PIcurrent controller
is adopted at start up and low speed, whileproportional flux
controller with feed-forward is adopted athigh speed. The
controller enters high speed mode when thespeed is higher than 410
RPM. Considering the sampling noise
-
Fig. 4. Diagram of the proposed sensorless control method.
TABLE II. PARAMETERS OF THE EXPERIMENTAL PLANT
Symbol Parameter valueR w SRM winding resistance 0.3 nis
switching frequency 20 kHzT Sampling period 0.0001 s
UDC DC bus voltage 300 VBon Tum on angle 216 0
Boff Turn off angle 3300
iref Reference current IDAko PLL gain ko 1000k v PLL gain k v
100000k a PLL gain k a 100000K p Proportional gain of the PI
current controller 5Ki Integral gain of the PI current controller
0.01
Kf Proportional gain of the flux controller 0.3
in practice, the control diagram of the system is shown in
Fig.4.Speed is controlled by varying the load torque and the
speedis control to ramp from zero to 4,500 RPM within 1 second.
The parameters of the system as well as the proposed PLLare
shown in TABLE II. The roots of (9) are -887.4438, -111.5460 and
-1.0102. They are all located on the negativereal axis which means
the response of error does not haveovershoot. The bode diagram of
(9) is shown in Fig. 5 withthe parameters shown in TABLE II. It is
shown from Fig. 5that the error is significantly attenuated.
A. Start Up and Low Speed
Fig.6 shows the three phase currents and estimated
rotorpositions during start up and low speed. The reference
currentof 10 A is injected to all three phases. The estimated
positionshave well converged after current exceed 5 A in all
three
Fig. 5. Bode diagram of (9).
phases. Then the calculation in TABLE I is performed andthe
controller enters low speed region. It is shown that thestart up
period is very short (about 1ms), which doesn't havemuch impact on
the torque production of the SRM.
Since speed is low at this time, the model based fluxcalculation
may suffer from integration errors. Fig.7 shows theflux linkage
estimation error at low speed. Estimating rotorposition with the
active phase may cause significant error.Therefore, current pulses
of about 5 A is injected to the inactivephases to estimated the
rotor position.
The estimated rotor position of one phase and the real rotor
Fig. 6. Three phase currents and estimated rotor positions.
Fig. 7. Real and calculated flux linkage during start up and low
speed.
-
posItion are shown in Fig.8. It is shown that the
proposedestimation method has significant accuracy during start up
andlow speed operation.
B. High Speed
The SRM is driven to 4,500 RPM (36,000 RPM in electricspeed) to
test its performance at high speed. Fig.9 showsthe estimated and
real positions during high speed operation.Fig.l0 shows the real
speed and estimated speed from thebeginning. It is indicated that
both the position estimation andspeed estimation are accurate.
C. Current Noise
In practice, the current sampling of ADCs may introducenoises to
the sampled currents. To simulate this case, whitenoise is
introduced to test the performance of the proposedsensorless
control method. Fig.ll shows the estimated rotorposition with the
sampled current and the real rotor position at4,500 RPM in this
case. It is shown that the estimated positionmatches the measured
position very well and is merely effectedby the noise. This is due
to the noise attenuation ability ofthe third order PLL. Fig.12
shows the position estimation
Fig. 8. Real and calculated rotor position during start up and
low speed.
Fig. 9. Three phase currents, estimated and real positions at
4,500 RPM.
Fig. 10. Real and estimated rotor speed from start up.
Fig. 11. The estimated and real positions with current noise at
4,500 RPM.
Fig. 12. The position estimation error with the PLL.
Fig. 13. The position estimation error without the PLL.
error from the beginning. As a comparison, Fig.13 shows
theposition estimation error without the third-order PLL. It
isshown that, compared to Fig.12 the estimation error
increasessignificantly without the PLL.
VI. EXPERIMENTAL RESULTS
Experiments are designed to verify the effectiveness of
theproposed position sensorless control method. The experimentsare
performed on a 12/8 SRM. It's flux linkage profile isshown in Fig.
2. A BLDC with diode rectifier is used as itsload. Fig.14(a) shows
the tested SRM and the load BLDC.A DCIDC converter is connected to
the output of the dioderectifier to adjust the load. Fig.14(b)
shows the power converterfor the SRM and the DCIDC converter and
the load resistor. Aposition sensor is installed on the tested SRM
to measure thereal position and speed. But this position and speed
are onlyused for comparison purpose, and is not used by the
proposedcontroller. The measured and estimated positions and
speedsare sent to a PC for record through USB communication
at10kHz.
Firstly, the rotor is fixed to test whether the proposedmethod
has the ability to start the SRM with heavy load.
-
Fig. 14. Experimental setup.
Fig. 15. Experimental current and position waveforms starting
with standstillrotor.
Fig. 16. The estimated and real positions during start up and
low speed.
The currents of phase A and phase B are sampled and shownin Fig.
15(a). Fig. 15(b) shows the estimated and measuredposition obtained
in the experiment. It is shown that duringthe start up period,
short pules are injected to estimate theinitial position. The
estimated initial position is very close tothe the real position.
The start up period is very short and thusit doesn't have obvious
impact on torque production. Then thecontroller enters low speed
operation and pulses are injectedon the inactive phases to estimate
the rotor position. In theexperiment, the rotor moves a little bit.
At first, phase A isturned on, current pulses are injected to phase
B. Then, phase Bis turned on. At this time, the position is
estimated by injectingcurrent to phase C. Then phase A is turned
off and currentpulses are injected to phase A. The estimated
position is veryclose to the real position.
Secondly, the SRM is controlled to run at 1,000 RPMand 4,500 RPM
respectively to test the effectiveness of theproposed position
sensorless control method. Fig. 16 shows thereal and estimated
position at start up and low speed operation.Due to the large
cogging torque of the load BLDC, the rotorstarts spinning with
vibration. This high dynamic introduceserrors in the beginning.
With the increment of the speed, theinertia of the load smooths out
the vibration and estimatedposition converges to the real position
shortly.
Fig. 17 shows the estimated and real position at 1,000RPM. It is
shown that the position estimation is very accurate.Fig. 18 shows
the estimated and real position at 4,500 RPM.It is shown that even
though there are few sampling point ineach period, the estimated
position is still accurate enough.Fig. 19 shows the real and
estimated speed, Fig. 20 showsthe corresponding position estimation
error. It is shown thatthe estimation response is fast and accurate
enough thatthe estimated speed matches the real speed very well.
Theestimation error is within ±18° and decreases to be in ±9° asthe
speed acceleration decreases.
VII. CONCLUSION
A new position sensorless control method for switchedreluctance
motor drives is proposed in this paper. Rotorposition is initially
calculated by a numerical method. Then,a third-order phase locked
loop considering the accelerationvariation is designed to undermine
the impact of currentsampling noise and numerical residual error on
the estimatedrotor position. The variation of speed acceleration is
consideredin designing the PLL to guarantee tracking accuracy
duringacceleration and deceleration. By applying the PLL, the
impactof current sampling noise on the estimated rotor position
is
-
Fig. 17. The estimated and real positions at 1,000 RPM.
Fig. 18. The estimated and real positions at 4,500 RPM.
Fig. 19. The estimated and real speed at 4,500 RPM.
Fig. 20. The estimated position error.
well attenuated. Simulation and experimental results showthat
the proposed sensorless control method has significantaccuracy on
both position and speed estimation.
ACKNOWLEDGMENT
This research was undertaken, in part, thanks to fundingfrom the
Canada Excellence Research Chairs Program and theNatural Sciences
and Engineering Research Council of CanadaDiscovery Grants
Program.
REFERENCES
[1] T. J. E. Miller, Switched Reluctance Motors and Their
Control. MagnaPhysics Pub., 1993.
[2] Jin-Woo Ahn, Seok-Gyu Oh, Jae-Won Moon, and Young-MoonHwang,
''A three-phase switched reluctance motor with
two-phaseexcitation," IEEE Transactions on Industry Applications,
vol. 35, no. 5,pp. 1067-1075, Oct. 1999.
[3] J.-W. Ahn, S.-J. Park, and D.-H. Lee, "Hybrid excitation of
SRMfor reduction of vibration and acoustic noise," IEEE
Transactions onIndustrial Electronics, vol. 51, no. 2, pp. 374-380,
Apr. 2004.
[4] D.-H. Lee, Z.-G. Lee, and J.-W. Ahn, "Instantaneous torque
controlof SRM with a logical torque sharing method," in Proc. 2007
IEEEPower Electronics Specialists Conference, Orlando, FL, Jun.
2007, pp.1784-1789.
[5] H. Goto, A. Nishimiya, H.-J. Guo, and O. Ichinokura,
"Instantaneoustorque control using flux-based commutation and
phase-torquedistribution technique for SR motor EV," COMPEL: The
InternationalJournal for Computation and Mathematics in Electrical
and ElectronicEngineering, vol. 29, no. 1, pp. 173-186, Jan.
2010.
[6] J. Ye, B. Bilgin, and A. Emadi, "Comparative evaluation of
powerconverters for 6/4 and 6/10 switched reluctance machines," in
Proc.2015 IEEE Transportation Electrification Conference and Expo
(ITEC),Dearborn, MI, Jun. 2012.
[7] Fan Yi and Wen Cai, "Repetitive control-based current ripple
reductionmethod with a multi-port power converter for SRM drive,"
inProc. 2015 IEEE Transportation Electrification Conference and
Expo(ITEC) , Dearborn, MI, Jun. 2015.
[8] Xin Kai, Zhan Qionghua, and Luo Jianwu, ''A new simple
sensorlesscontrol method for switched reluctance motor drives," in
Proc. TheEighth International Conference on Electrical Machines and
System,Nanjing, China, Sep. 2005, pp. 594-598 Vol. 1.
[9] E. Ofori, T. Husain, Y. Sozer, and I. Husain, "A pulse
injectionbased sensorless position estimation method for a switched
reluctancemachine over a wide speed range," in Proc. 2013 IEEE
EnergyConversion Congress and Exposition (ECCE), Denver, CO, Sep.
2013,pp. 518-524.
[10] H. Gao, F. Salmasi, and M. Ehsani, "Inductance
Model-BasedSensorless Control of the Switched Reluctance Motor
Drive at LowSpeed," IEEE Transactions on Power Electronics, vol.
19, no. 6, pp.1568-1573, Nov. 2004.
[11] J. Cai and Z. Deng, "Sensorless Control of Switched
Reluctance MotorBased on Dynamic Thresholds of Phase Inductance,"
Electric PowerComponents and Systems, vol. 40, no. 8, pp. 915-934,
Apr. 2012.
[12] Jun Cai and Zhiquan Deng, "Sensorless Control of Switched
ReluctanceMotor Based on Phase Inductance Vectors," IEEE
Transactions onPower Electronics, vol. 27, no. 7, pp. 3410-3423,
Jul. 2012.
[13] J. Cai and Z. Deng, "A Position Sensorless Control of
SwitchedReluctance Motors Based on Phase Inductance Slope," Journal
ofPower Electronics, vol. 13, no. 2, pp. 264-274, Mar. 2013.
[14] J. Ye, B. Bilgin, and A. Emadi, "Elimination of Mutual Flux
Effect onRotor Position Estimation of Switched Reluctance Motor
Drives Con-sidering Magnetic Saturation," IEEE Transactions on
Power Electronics,vol. 30, no. 2, pp. 532-536, Feb. 2015.
[15] J. Lyons, S. MacMinn, and M. Preston, "Flux-current methods
forSRM rotor position estimation," in Proc. The 1991 IEEE
IndustryApplications Society Annual Meeting, vol. 1, Dearborn, MI,
Sep. 1991,pp. 482--487.
-
[16] M. Islam and I. Husain, "Torque ripple minimization with
indirectposition and speed sensing for switched reluctance motors,"
in Proc.The 25th Annual Conference of the IEEE Industrial
ElectronicsSociety, vol. 3, San Jose, CA, Nov. 1999, pp.
1127-1132.
[17] I. Al-Bahadly, "DSP-based sensorless position estimation in
switchedreluctance drives," in Proc. The 25th Annual Conference of
the IEEEIndustrial Electronics Society, vol. 3, San Jose, CA, Nov.
1999, pp.1133-1138.
[18] R. McCann, M. Islam, and I. Husain, ''Application of a
sliding-modeobserver for position and speed estimation in switched
reluctancemotor drives," IEEE Transactions on Industry
Applications, vol. 37,no. 1, pp. 51-58, Feb. 2001.
[19] M. Islam, I. Husain, R. Veillette, and C. Batur, "Design
and performanceanalysis of sliding-mode observers for sensorless
operation of switchedreluctance motors," IEEE Transactions on
Control Systems Technology,vol. 11, no. 3, pp. 383-389, May
2003.
[20] M. Divandarl, A. Koochaki, M. Jazaeri, and H. Rastegar, "A
NovelSensorless SRM Drive via Hybrid Observer of Current Sliding
Modeand Flux linkage," in Proc. 2007 IEEE International Electric
Machines& Drives Conference, Antalya,Turkey, May 2007, pp.
45-49.
[21] I. H. AI-Bahadly, "Examination of a Sensorless
Rotor-Position-Measurement Method for Switched Reluctance Drive,"
IEEETransactions on Industrial Electronics, vol. 55, no. 1, pp.
288-295, Jan. 2008.
[22] B. Fahimi, A. Emadi, and R. Sepe, "Four-Quadrant Position
SensorlessControl in SRM Drives Over the Entire Speed Range,"
IEEETransactions on Power Electronics, vol. 20, no. 1, pp. 154-163,
Jan.2005.
[23] W. Zeng, C. Liu, Q. Zhou, J. Cai, and L. Zhang, "A new
flux/currentmethod for SRM rotor position estimation," in Proc.
2009 InternationalConference on Electrical Machines and Systems,
Tokyo, Japan, Nov.2009.
[24] J. Wolff, R. Rahner, and H. Spath, "Sensorless Speed
Control OfA Switched Reluctance Motor For Industrial Applications,"
in Proc.The 6th International Conference on Optimization of
Electrical andElectronic Equipments, vol. 2, Brasov, Romania, May
1998, pp.457-462.
[25] G. Gallegos-Lopez, P. Kjaer, and T. Miller, "High-grade
positionestimation for SRM drives using flux linkage/current
correctionmodel," IEEE Transactions on Industry Applications, vol.
35, no. 4,pp. 859-869, Aug. 1999.