Embed Size (px)
DESCRIPTION
Here the DC drive is being controlled using a Fuzzy Logic controller and shown how it is improved in comparison to a PID controller.
Citation preview

Position Control of DC Servo Drive Using Fuzzy Logic Controller
R.Manikandan Department of EEE
The Kavery Engineering College Salem, Tamil Nadu.
R.Arulmozhiyal
Department of EEE Sona College of Technology
Salem, Tamil Nadu. [email protected]
Abstract- This paper presents the position control scheme of DC servo motor drive. The fuzzy PI controller is developed for controlling the position of DC servo motor drive. The DC servo motors are highly preferred because of high power rating and speed of the motor. The proposed technique is a closed loop real time control scheme where the position control is obtained through position sensor, it is coupled with the motor shaft for provide a feedback position signal. The position control scheme of DC servo motor drive incorporating the fuzzy logic control which is experimentally implemented using a digital signal peripheral interface controller dspic 30F2010. The performances of the proposed fuzzy logic controller based DC servo motor drive were investigated and it is compared with conventional PI controller based drive. The simulated and experimental results of conventional and fuzzy controller is compared and results illustrates that the FLC gives better dynamic performance also it is more robust for industrial position control drive applications.
Keywords - DC servo motor, position control, fuzzy logic controller, PI controller, dspic, MATLAB.
I. INTRODUCTION
In recent years DC motors are used in high performance drive system because of its advantages. A DC servo motor which is usually a DC motor of low power rating is used as an actuator to drive a load. It is having high ratio of starting torque to inertia and faster dynamic response. Because of their high reliability, flexibility and low cost, DC servo motors are widely used in industrial applications, robot manipulators and home appliances where speed and position control of motor are required [1-4]. It is a common actuator in control system, it is directly provides the rotary and transitional motion. In this paper permanent magnet DC motor is preferred. Here the field excitation is by permanent magnet and remains constant under all operating conditions. DC servo drive systems normally use the full four quadrant operations which allow bidirectional speed control with regenerative braking capabilities [5-8]. This paper demonstrates the position control based drive by conventional and fuzzy PI controller. The conventional methods have the following difficulties, it depends on the accuracy of the mathematical model of the system and the expected performance is not met due to the load disturbances. The classical linear control shows good performance only at one operating speeds. Fuzzy logic is a technique to embody human like thinking into a control system [9-12]. Fuzzy control has been primarily applied to the control of processes through fuzzy linguistic performances. The fuzzy controller gives the better dynamic performance as well as error reduction.
The first section gives the introduction and importance about the paper. The second section of the paper discuss about the DC position servo drive concept. Design of speed/position controller with conventional and fuzzy technique is discussed in the third section of the paper. The fourth section deal with the simulation work carried through MATLAB environment. The fifth section explains the experimental implementation. The sixth section is about the results and discussions. The final section present in this paper is the conclusion.
II. DC POSITION SERVO DRIVE
The DC position servo drive is depicted in the fig1. The position and speed control is obtained with conventional or fuzzy logic controller. The block diagram consists of four quadrant chopper with bidirectional control drive it drives the dc servo motor. The supply to the 4-quadrant chopper is derived from the diode rectifier. The chopper circuit contains four MOSFET’s. The gate pulse for the MOSFET is obtained from PWM generator. Device 1&2 is for forward direction, 3&4is for reverse direction of the motor. So that the motor can able to run in 4-quadrants such as forward motoring, forward braking, reverse motoring, and reverse braking.
Fig 1 Block diagram of DC position servo drive
The block diagram shows the shaft of the motor is coupled with the position sensor. The position sensor is used to obtain the actual position of the motor. It is then compared to set position, the difference between two generates an error. If the set position is greater than the actual position then the position error output of the comparator is positive else it will be negative. The position error so obtained is processed in position PI controller and its output sets the position angle then it is fed to limiter. It controls the speed range from higher to lower limited value, here the carrier and reference signal are controlled and modulated up to desired values. This PWM pulses is fed to the four quadrant chopper.
By varying the duty cycle of the pulses the motor voltage can be varied. The position of the motor is obtained by

indirect form of measurement by integrating the speed of the motor.
∫= dtωθ (1)
Where, θe= θs – θr (2)
The above equations describes θe- position error, θs -set position, θr -actual position of the motor. By varying the duty cycle of the chopper, the output voltage gets controlled. The output voltage of the chopper is given as,
Vo= Vdc*(Ton-Toff)/T (3) If the duty cycle is 50%, both on and off time same so the motor is not in operating condition. At same time if we increasing or decreasing the pulse width the drive will operates either in forward or reverse manner.
III. DESIGN OF POSITION / SPEED CONTROLLER A. conventional position/speed controller The conventional PI controller block model is given in fig 2. It is one of the most common approaches for position/speed control in industrial electrical drives. in general, because of its simplicity, and the clear relationship existing between its parameters and the system response specifications a very common method to determine the Kp and Ki constants of the PI controller is the method of Ziegler-Nichols.
Fig.2 Conventional PI controller
Based on the rules Ziegler-Nichols, the values of Kp and Ki are found out as 0.5 and 0.05 respectively. The main drawback in this controller it depends on the accuracy of the mathematical model of the system and also the expected performance is not met due to the load disturbance. To overcome this drawback we are going to implement the fuzzy controller in the proposed technique. B. Fuzzy PI controller
Fig.3 Fuzzy PI controller
To determine a fuzzy rule from each input-output data pair,
the first step is to find the degree of each data value in every membership region of its corresponding fuzzy domain. The variable is then assigned to the region with the maximum degree, when each new rule is generated from the input-output data pairs, a rule degree or truth is assigned to that rule, where this rule degree is defined as the degree of confidence that the
rule does in fact correlate to the function relating voltage and current to angle. Fig3 shows the block model of fuzzy PI controller the position/speed error is calculated with comparison between reference speed/position. Speed error and speed error changing are fuzzy controller inputs. The Input variables are normalized with a range of membership functions specified and the normalization factors are named as K1, K2 and K3 is the denormalization factor. These factors play a vital role for the FLC. The factors K1and K2 are chosen to normalize the speed error’e’ and the change of speed error ‘ce’. K3 are chosen denormalize the PWM width. The fuzzy logic controller initially converts the crisp error and change in error variables into fuzzy variables and then are mapped into linguistic labels. Membership functions of input ‘e’, ‘ce’ and ‘pwm’ are shown in fig 4 which consist of two inputs and one output. The triangular membership functions are used for all the fuzzy set of the input and output vectors. There are seven MFs for the input e, ce, and output u as pwm. All the MFs are symmetrical for positive and negative values of the variables. The linguistic labels are divided into seven groups.
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
Deg
ree
of m
embe
rshi
p
z ps pmnl nsnm pl
Fig.4 Membership Functions of ‘e’ ‘ce’ ‘u’
They are nl - negative large, nm - negative medium, ns - negative small, z- zero, ps- positive small, pm - positive medium, pl - positive large.
The fuzzy-rule-based matrix used for the proposed DC servo motor specific FLC algorithm is shown in table I. The top row and left column of the matrix indicate the fuzzy set of the variables ‘e’ and ‘ce’ respectively, and the MFs of the output variable ‘pwm’ are shown in the body of the matrix. There are 7*7=49 possible rules in the matrix. Mamdani type inference is used for inference engine. The surface view of the fuzzy PI controller is shown in Fig5, where as the x-axis is error ‘e’ and y-axis change is error ‘ce’ and z-axis is output ‘u’ as command PWM.
TABLE I- Fuzzy rule-based matrix
e
ce nl nm ns z ps pm pl
nl nl nl nl nl nm ns z nm nl nl nl nm ns z ps ns nl nl nm ns z ps pm z nl nm ns z ps pm pl ps nm ns z ps pm pl pl pm ns z ps pm pl pl pl pl z ps pm pl pl pl pl

-1-0.5
00.5
1
-1-0.5
0
0.51-1
-0.5
0
0.5
1
ece
u
Fig.5 Surface View
IV. SIMULATION
The name MATLAB stands for matrix laboratory MATLAB is a high performance language for technical computing. It integrates computation, visualization, and programming in an easy-to-use environment where problems and solutions are expressed in familiar mathematical notation. Simulink model for the position control of DC servo motor drive is depicted in fig 6.It elucidate the overall operation of this module. The circuit model has a DC motor drive with H-bridge. Fig 7 a and b demonstrates the subsystem block for conventional and fuzzy PI Speed/Position controller. It is controlled by manual switch as below in block model.
rd>rpm
30/pi
rd>rmp
-K-
rd>deg
-K-
Discrete,Ts = 2e-006 s.
integrator
1/s
Vdc
Va
TL
0
Speed ControllerPI & Fuzzy PI
S_E S_U
Set Position
Scope2
Position ControllerPI & Fuzzy PI
P_E P_U
Limiter_2Limiter_1
H-Bridge
MI
+Vdc
-Vdc
+ve
-ve
Gear Ratio10:1
1/10
Display1
-0.003628
0
Display
-1.536
DiscreteDC Machine
TLm
A+ F+
A- F-
dc
<Speed wm (rad/s)>
Fig.6 Simulation Circuit for position control
(a) Block for conventional PI
(b) Block for fuzzy PI controller Fig.7 Subsystem for Position/Speed Controller
The fuzzy logic controller initially converts the crisp error and change in error variables into fuzzy variables. There are two input ‘e’, ‘ce’ and only one output as ‘u’ for PWM. The triangular membership functions are used to generate the control signals in this proposed technique.
V. EXPERIMENTAL IMPLEMENTATION The proposed FLC based position control of DC servo
motor drive is experimentally implemented using dspic 30F2010 through both hardware and Matlab software. Fig 8 shows the block diagram of such hardware implementation. It has two potentiometers, one is coupled with the motor shaft to sense the actual position of the motor, and another one is used for set position. The difference between two are compared in the dspic controller. It produces the PWM pulse signal. These PWM signals are fed to the bi-directional drive. The bidirectional drive contains four MOSFETS. These devices are triggered by PWM signals generated by the dspic controller to operate the drive in required modes.
DSPIC CONTROLLER
BI-DIRECTIONAL DRIVE (H-BRIDGE)
PWM PULSE
POTPOT
+5V
+12V
+5V+5V
M
POT=10K Ω
Fig.8 Hardware Block Diagram
Programming of dspic through Matlab/simulink using novel technique is depicted in fig 9. It contains ADC input block which has 2 Analog inputs. It produces +5V signal. In two analog inputs one is for AN0 is for set value and AN1 for actual value of position. These signals are fed to the conversion block. The conversion block must be in double. Then it is multiplied with gain for getting 360°, output equivalent to 5V signal. When we vary the voltage (0-5v) the position also varies. Then the converted signal is fed to the comparator. It evaluates and delivers the error output. Then it is controlled by fuzzy logic controller to generate PWM width.
Fig.9 Programming dspic through Matlab/Simulink
The summer enhances the signal with the constant value 2000. Then this is fed to PWM generating block. When the two values are equal the motor doesn’t rotate. When the value is positive the motor rotates in forward direction else in negative direction. From the Investigation of simulation the fuzzy PI controller is more reliable and accurate than conventional PI. So that the hardware implementation is made
PWM_Motor
EN
Periode
PWM1
dsPIC MASTER30f2010
20.00 MIPS
Master
Compile for dsPIC(double-cl ick)
Generate Code
0.3515625
Gain1
0.3515625
Gain
Fuzzy Logic Control ler
double
D_3
double
D_2uint16
D_1
double
D
2000
1
2000
ADC
AN_0
AN_1
ADC Input

up of only fuzzy PI controller. Fig10 shows the photo view of hardware implementation.
Fig.10 Experimental setup photo view
VI. RESULTS AND DISCUSSION
Several tests were performed to evaluate the performance of the proposed FLC based position control of DC servo motor drive system both simulated and experimentally. To evaluate the performance of the system, series of measurements have been accomplished.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-90
0
90
180
270
Pos
ition
(T
heta
)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-150
-100
-50
0
50
100
150
Time (sec)
Spe
ed (
rpm
)
Act-Position
Set-Position
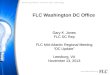
Fig.11 Simulation response at position (0-180-0) in
conventional PI
Fig 11 shows the position and speed versus time curve of motor under no load condition with an angle of (0-180-0) degrees in conventional PI controller response. From the response it is understood that the speed increases gradually at the time of starting and maintain constant maximum set limited speed until position reaches the desired position then gets gradually decreases to zero. Conventional PI response settles the position at 0.8 sec. After 1 second the set position change to 180 to 0 degree then the speed of motor goes to reverse tends to reach the zero point of desired position. The settling time of response 0.8sec and have 2.7% of error.
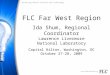
Fig 12 shows the position and speed versus time curve of motor under no load condition with an angle of (0-180-0) in fuzzy PI controller response. From the response it is understood that the fuzzy PI response settles the position at 0.5 sec. After 1 second the set position change to 180 to 0 degree then settling time of response is again 0.5sec and there is have very less 0.25% of acceptable error.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-90
0
90
180
270
Pos
ition
(T
heta
)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-150
-100
-50
0
50
100
150
Time (sec)
Spe
ed (
rpm
)
Act-Position
Set-Position
Fig.12Simulation response at position (0-180-0) in
fuzzy PI controller
From the above result we understood that the fuzzy PI has settled earlier when compared to conventional PI. It gives better dynamic response. The complete comparison shown in table 2.
TABLE-II Simulation results comparison
The simulated results are verified by the experimental results. Fig 13 shows the position versus time curve of motor under no load condition with a voltage of (0-5-0) v for angle of (0-300-0) degree in fuzzy PI controller responses. From the response it is understood that position is changed 0 to 300degree at 5 sec, the actual position settles after 4 sec for 0 to 5v.
After 14 sec the position is changed from 5-0v which is equivalent to (300-0)degree the settling time takes same 4sec that is position reaches zero degree at 18sec.
Fig.13 Experimental response at position (0-300-0) degree
Set position
Actual position
Conventional PI Fuzzy PI
Ts (sec) % of Error Ts (sec) % of
Error
0-180 0.8 0.87 0.5 0.25
180-0 0.8 2.77 0.5 0.25

Fig.14 Experimental response at position (0-150-300-150-0) degree
To verify the full performance the hardware further tested
at different frequent changing positions. Fig.14 shows the position versus time curve of motor under a condition with a voltage of (0-2.5-5-2.5-0) v which is equivalent to (0-150-300-150-0) degree. From the response curve settling time of fuzzy PI controller is more or less equal and there is less considerable error.
TABLE-III Experimental results
A complete hardware results is given in table III. From the
result we identified % of error and settling time is less in fuzzy controller. Also reduced amount of settling time is in fuzzy controller.
VII. CONCLUSION
The fuzzy logic controller based position control of DC servo motor drive with simulation and real time experimental implementation using dspic30F2010 controller has been presented in this paper. It is found that the position of DC motor can be controlled and return back to desired value easily. In Fuzzy logic control it is not necessary to change the control parameters at any conditions. It does not happen in conventional PI. It is clear that the fuzzy PI controller is more advantageous than conventional PI because the settling time is very low compared to the conventional PI Controller. It gives better dynamic response. This proposed scheme is very suitable for applications of industrial position control drives.
REFERENCES
[1] Ahmed, N.A., 2005. Modeling and simulation of AC-DC buck-boost converter fed dc motor with uniform PWM technique. Elect. Power syst. Res., 73: 363-372.
[2] Dewan, S. B. And Straughen, A., Power semiconductor circuits, john Wiley & sons, New York, 1975.
[3] Ong, C.M., 1998. Dynamic simulation of electric machinery: using MATLAB/SIMULINK. 1st edn. Prentice hall PTR, New Jersey, ISBN: 0137237855, pp: 626.
[4] Dubey, G.K., Power semiconductor controlled drives, prentice-hall international, 1989.
[5] Mohan, N., Undeland, T. M., & Robbins, W.P., Power electronics: converters, applications & design, john Wiley & sons, newyork, 2003.
[6] MPLAB IDE, simulator, editor user’s guide. [7] L.A.Zadeh,”fuzzy sets”, Inform. Control, vol.8, pp.338-353,
1965. [8] Chuen Chien lee, “Fuzzy logic in Control systems: fuzzy logic
controller-part1, 2”1990 IEEE. [9] Fuzzy logic Toolbox user guide.Natick, MA: Math Works,
1997. [10] K. Zhou and J. C. Doyle, Essentials of Robust Control. Upper
Saddle River, NJ: Prentice-Hall, 1998. [11] S. Hara, Y. Yamamoto, T. Omata, and M. Nakano, “Repetitive
controlsystem: A new type servo system for repetitive exogenous signals,”IEEE Trans. Automat. Contr, vol. 33, 1988.
[12] R. W. Erickson, Fundamentals of Power Electronics, 2nd ed. Secaucus,NJ: Kluwer, 2000.
R.Manikandan was born in salem,Tamilnadu, India in 1986. He received B.E degree in Electrical and Electronics Engineering from Mahendra Engineering College at 2008. and also M.E degree in power electronics and drives from Sona College of technology at 2010. He is now working as an
Assistant Professor at the Kavery engineering college. He is currently doing Ph.D based on fuzzy logic speed control drives of BLDC motor drives. He is a life time member of ISTE.
Dr.R.Arulmozhiyal was born in chennai,Tamilnadu, India in 1973. She received the B.E. and M.E. degrees in electrical engineering from University of the Madras, Anna, India, in 1999 and 2006, respectively. and the Ph.D. degree in Electrical engineering from Anna University of technology, Coimabtore, India, in 2011. Since 1999, She has been
with Department of Electrical and Electronics Engineering, Faculty of Engineering, Sona College of Technology, Tamilnadu, India where she is currently a Professor. Her research interests are in the areas of AC Motor Control, AI Techniques to Solid State Drives. Mrs. Arulmozhiyal is a Member in IEEE society, life member in ISTE and member in IE(I).
Set voltage (volt)
Set position (degree)
Actual position (degree)
Ts (sec) % of Error
0-5 0-300 4 0.6
5-0 300-0 4 0.6
0-2.5 0-150 2 0.6
2.5-0 150-0 2 0.6