Embed Size (px)
Citation preview

NNeewwss ffoorr,, bbyy,, aanndd aabboouutt AAmmaatteeuurr AAssttrroonnoommeerrss aarroouunndd tthhee wwoorrlldd!! Spring 2008
Observing Mars * Star Party Calendar * Crepuscular Rays * Shorts From Down Under * Star Conference *Solar Observing & Sketching * A Night on Mount Wilson * Defenders of Earth * The Selenographers * NoPhotoshop, No Problem * Mellowing Out with Didy Shots * HOA Star Party * Deep Sky Observing with a60mm Refractor * Reader’s Forum *Short Subjects *Star People *The Gallery
The Portable 0.7-Meter CDK Portable 0.7-Meter CDK Alt-Az Alt-Az TTelescopeelescope
AmateurAstronomy 57

2 Amateur Astronomy #57 Spring 2008
IInnttrroodduuccttiioonn
The 5-meter Hale telescope on Mt. Palomar, completedover a half century ago (1948), remains the largest equa-torially-mounted telescope ever built. There are now
some 18 larger telescopes ranging in aperture from the 6-meterZelentchouk telescope on Mt. Pastukhov to the two 10-meterKeck telescopes on Mauna Kea. Every single one of these largemountaintop telescopes employs an altitude-azimuth (alt-az)mount for two fundamental reasons. First, alt-az mounts arevery compact as compared with equatorial mounts. Second,unlike equatorial telescopes, the forks and azimuth structuresof alt-az telescopes do not change their orientation with respectto local gravity, while their optical tube assemblies (OTAs)only change their orientation in one plane (altitude) instead oftwo (right ascension and declination). As a result, the cost oflarge alt-az telescopes and their enclosures is greatly reducedas compared to equivalent aperture equatorial telescopes.
We recognize that equatorial telescopes have certain advan-tages. Tracking only requires a constant-rate drive in one axis.An alt-azimuth telescope requires constantly changing driverates in three axes: altitude, azimuth, and field orientation.However, since low cost, off the shelf microcomputer-basedalt-az telescope control systems are now readily available, thequestion that interests us is whether or not the alt-azimuth rev-olution that began with large-aperture telescopes can now beextended to research-grade telescopes in the 0.5- to 1.0-meteraperture range?
Would such economical, modest aperture alt-az telescopesbe scientifically useful if they could be developed? Largerobotic survey telescopes are now uncovering thousands ofinteresting objects whose true nature can only be revealedthrough extensive follow-up observations. There simply is notenough large telescope time for such observations, so this taskfalls to modest aperture research telescopes. If the cost of suchmodest aperture telescopes could be significantly reduced,their numbers could increase, and the more extensive follow-up observations they could make would enhance our scientificunderstanding to the benefit of the astronomical community.
Of course, several thousand telescopes in the 0.5- to 1.0-meter class already exist; these are the classic Dobsoniandesign constructed by amateur astronomers. These telescopeshave been optimized for visual observing and feature excep-tionally low cost construction. Furthermore, hundreds of equa-torially mounted 0.5- to 1.0-meter class telescopes in observa-tories around the world represent a proven design for researchand imaging. We are tapping both of these knowledgeable,well established "telescope communities" for applicable ideas.
Our overall objective is to build a similar "community ofknowledge" with respect to the development of low cost, mod-est aperture, research-grade alt-azimuth telescopes. As thisopen source knowledge base expands, it could spur both com-mercial production and individual construction of innovative,modest aperture, alt-az telescopes. Our objective is to encour-age discussion and receive feedback from those interested insuch designs, and to entice others to join in our developmentefforts or initiate their own.
In an earlier paper (Genet et al 2007) we suggested that"…the combination of low-cost alt-azimuth telescope controlsystems and affordable aerospace materials had reached a pointwhere a revolutionary new class of lightweight, highly capablealt-azimuth telescopes is emerging." In this paper, we movebeyond such generalities to a conceptual design for a 0.7-meterportable alt-azimuth telescope.
OOuurr ggooaallss ffoorr tthhiiss ddeemmoonnssttrraattiioonn tteellee-ssccooppee iinncclluuddee::
1.) Wide-field photo-visual optics for science, imaging, andvisual observing.2.) Ease of manufacture, implying that the telescope will below in cost.3.) Component cost budgeting that allocates money for per-formance.4.) Go-to pointing with sufficient accuracy to satisfy research
Article by Dave Rowe, Russ Genet, Dan Gray, Rick Hedrick, Bob Peasley, Tong Liu,Ty Safreno, John Ridgely, Howard Banich, Tom Krajci, Tom Smith, Jim Widmann,Xiao-Hua Yu, Joe Habermann, Richard Berry, Mel Bartels, Richard Kay, CraigBreckenridge, and Jolyon Johnson
Portable 0.7-Meter CDK Portable 0.7-Meter CDK Alt-AzAlt-AzTTelescopeelescope
forResearch, Astrophotography, and Visual Observation
ATM Corner

Spring 2008 Amateur Astronomy 3
requirements.5.) Open-loop tracking to satisfy research and imaging require-ments.6.) Field de-rotation with sufficient accuracy to allow wide-field imaging.7.) Structural stiffness to resist wind pressure and gravitationalloading.8.) A high precision, wide bandwidth control system to counterwind pressure.9.) Flexible, maintainable computer-standards-compliant con-trol software.10.) Portability.
WWhhyy WWee CChhoossee aa 00..77-mm NNaassmmyytthh CCDDKK
The optical tube assembly (OTA) of the telescope is one ofthe principal drivers for the telescope design. The OTA's
width, length, and moment of inertia determine many of themechanical properties of the mount. The width is determinedby the aperture of the telescope, but the length and moment ofinertia are determined by the optical design.
Our first major decision, therefore, was to pick an apertureand optical design. Because we were interested in telescopes inthe 0.5- to 1.0-meter range, we selected an aperture at the geo-metric middle of that range: i.e., 0.70 meters.
At first, we considered a Newtonian parabolic configurationwith a Wynne corrector. This combination has worked well for
many telescopes. Low cost parabolic correctors are availablefrom TeleVue, Baader, and Lumicon, and larger diameterWynne correctors are available from Keller. This tried-and-trueapproach has much to commend it, and it is entirely appropri-ate for smaller apertures and lightweight instruments such asCCD cameras. However, most of these correctors have limitedbackfocus distance, which may preclude the use of both an off-axis guider and deviator plate or other backfocus-hungryinstrumental combinations, although a Keller corrector with alonger backfocus distance is available from DreamScopes.
We then considered a Newtonian configuration with ahyperbolic primary mirror and a two-element corrector. Unlikethe Wynne design, correctors for hyperbolic mirrors are specif-ic to the focal length of the primary. Nonetheless, the correctedhyperbolic system can simultaneously provide generous back-focus and large, well corrected flat fields. In addition, the cor-rector lenses for these systems can be manufactured in largediameters at reasonable cost. Their generous backfocus facili-tates the incorporation of a deviator plate, off-axis guider, fil-ters, and other instrumentation as needed. The large field ofview allows, simultaneously, both large format cameras andaccess to a wide selection of guide stars, necessary if onedesires a bright guide star for high frequency deviator plate cor-rections. We highly recommended this configuration for 0.5meter class telescopes.
As the aperture increases, access to a Newtonian focus viaincreasingly tall ladders becomes unattractive even for most
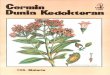
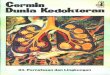
Two views of our 0.7-meter alt-az conceptual design. The combination of an alt-az mount, lightweight structure,and dual Nasmyth foci could provide a compact, portable, low cost, easy to use, research-grade telescope.
Renderings by Bob Peasely

4 Amateur Astronomy #57 Spring 2008
experienced visual observers, not to mention educators withyoung students. Furthermore, placing large scientific instru-ments at the Newtonian focus increases the moment of inertiaof the OTA and lowers its natural resonant frequency. Suchinstrument placement also adds to the wind cross-section at itsmost leveraged point.
For these reasons, we chose for our 0.7-meter telescope'sbasic optical configuration a Nasmyth focus with a tertiary mir-ror. eyepiece and instruments are at the pivot point of the alti-tude axis, so even with large changes ininstrument loads, no counterweights arerequired and the instrument's moment ofinertia is minimized. A tertiary mirror,admittedly a significant complication, isrequired because a compact, portable alt-azconfiguration is not well suited for accessat the Cassegrain focus.
A Nasmyth focus is inappropriate for asmall aperture telescope because the nativefocal plane will be located too close to theground for convenient use. However, as theaperture is increased, a comfortable sittingheight is eventually reached. This mini-mum natural height is achieved at approxi-mately 0.7 meters of aperture, althoughsmaller telescopes could use piers or othermethods to raise the height of the focalplane. At larger apertures, such as 1.0meters, there are comfortable standing-height eyepiece positions.
Three optical systems meet the criteria forour Nasmyth-focus telescope: the classicalCassegrain, Ritchey Chrétien, and correctedDall Kirkham Cassegrain. We chose the cor-rected Dall Kirkham (CDK) for its wide,well corrected flat field, generous backfo-cus, and its relative insensitivity to second-ary mirror lateral misalignment (the secondary mirror is spher-ical). PlaneWave Instruments manufactures an OTA with CDKoptics designed by one of the authors (Rowe); this design hasproven to work well for demanding, wide field astrophotogra-phy.
OOppttiiccaall DDeessiiggnn
The optical layout of the 0.7-meter CDK is shown inDiagram 1. The tertiary mirror can rotate 180 degrees mak-
ing both Nasmyth focus locations available.We selected this optical configuration for the following rea-sons:1.) It has a wide, flat, well-corrected field over a very broadwavelength region.2.) The spherical secondary has no optical center, making thetelescope easier to collimate than other Cassegrains. In addi-tion, a sphere is easier and much less expensive to figure thanthe convex hyperboloid needed in other Cassegrain designs.3.) The under-corrected primary is easier and less expensive tofigure than its counterparts.4.) The CDK can be designed with long back focus distancebetween the corrector and the focal plane, making it ideal for a
Nasmyth configuration where the light must pass through thealtitude bearings and field de-rotator.
Two very common Schott glasses, BK7 and SK11, are usedin the two-element corrector. The prolate ellipsoidal primarymirror is 64% corrected from a sphere to a paraboloid. Atƒ/6.45, the telescope is quite fast for a Cassegrain configura-tion, providing the user with excellent etendue (the product ofthe collecting area and field solid angle) when a large imagingsensor is used. This well corrected field supports the largest
commercially available CCD sensors avail-able today, and should continue to do sowell into the future. The large, flat field isvery useful for a variety of off-axis guider(OAG) configurations.
OOppttiiccaall MMaannuuffaaccttuurriinngg
We considered several approaches tomanufacturing the 0.7-meter, f/3.0
primary mirror blank. Traditional slumpedor flat "full thickness" (55-mm) Pyrex hasworked well for mirrors of this size whensupported by 18- or 27-point whiffletreesand would be a good choice. However,faster initial thermal cooling and bettertemperature tracking can be achieved withmirrors with lower mass and greater aircontact area. Examples include cast open-back mirrors, fused cellular mirrors such asthose made by Hextec and Wangness, andfused sandwich mirrors such as those madeby Hubble Optics.
For our 0.7-meter prototype tele-scope, we chose to utilize a two plateHubble Optics fused sandwich mirror withone intermediate layer of circular spacers(patents pending in both China and theUnited States). Each plate and the spacer
layer is 19 mm thick, for an overall thickness of 57 mm (2 ¼inches). There are 372 spacers, each 16 mm in diameter, dis-tributed in 9 rings. The mirror will weigh about 70 lbs., whichis less than an equivalent solid 0.7-meter 55-mm thick Pyrexmirror. With correct air flow, this blank will equilibrate muchfaster than a solid equivalent. In addition, we expect it to haveless self-weight deformation.
MMiiccrrooccoommppuutteerr CCoonnttrroolllleedd TTeelleessccooppeess,, tthheeHHiissttoorriiccaall PPeerrssppeeccttiivvee
Several of us have been involved, over the years, in thedevelopment of microcomputer controlled telescopes.
Genet's 1982 Real Time Control with the TRS-80 was, perhaps,the first book on real time control with microcomputers. In1983, Louis Boyd and Genet achieved totally automatic opera-tion with a telescope that continued in use for 25 years.Microcomputer Control of Telescopes by Mark Trueblood andGenet was published in 1985. It featured amateur built systemsalong with analyses, circuitry, software, and formulae. Anupdated version of Trueblood and Genet's book, TelescopeControl, is still available.
The Nasmyth optical configuration pro-vides a convenient, fixed height eyepiecefor visual observations, as well as aninstrument location at the altitude axis thatdoes not require rebalancing even withinstruments of widely differing weights.

Spring 2008 Amateur Astronomy 5
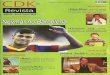
Diagram 1
The optical layout of the 0.7-meter CDK telescope. The optical axis and altitude axis are coincident-oftencalled the Nasmyth-focus configuration. The telescope is fully baffled over a 60-mm diameter image cir-cle. The linear central obstruction is 41% (17% in area) and the effective focal ratio is f/6.45. The auxil-iary disk baffle prevents undesired illumination of the focal plane from the opposite side of the telescope.
Radius 1 Thickness Radius 2 Aperture Diameter Spacing
Primary -4200 mmSC=-0.64 700 mm 1250 mm
Secondary Baffle 284 mm 50 mm
Secondary Mirror -3000 mm SC=0 270 mm 550 mm
Tertiary Baffle 188 mm 500 mm
Tertiary Mirror Flat 135 mm Minor axis 372 mm
Lens 1 - BK 7 -1203 mm 12 mm -356 mm 100 mm 1 mm
Lens 2 - SK 11 143.3 mm 7 mm -109.3 mm 100 mm 274.3 mm
Focal Surface Flat
The optical prescription of the 0.7-meter CDK telescope. SC is the conic deformation constant. The primary is aprolate ellipsoid that is 64% corrected from a sphere to a paraboloid. The secondary mirror and all four lenssurfaces are spherical. The secondary and tertiary baffle dimensions and locations are provided.

6 Amateur Astronomy #57 Spring 2008
Bartels began developing his com-puter controlled telescope in 1988. Thesystem incorporated two innovations.First, he altered the chipset of x86 com-puters for real-time control in order tomicro-step two stepper motors by gener-ating eight concurrent pulse width mod-ulation (PWM) signals in software. Thedigital PWM information was outputtedvia the parallel port to a simple and inex-pensive current switching circuit.Second, the stepper motor control wastied to a precision coordinate translationengine with error correction for alt-azmounts running on a 286 or 386 person-al computer. Currently, we estimate thatover 1,000 telescopes worldwide arerunning versions of this system.
Servos have gained in popularity withthe introduction of Gary Myers'ServoCAT and Gray's SiderealTechnology controller in the past severalyears. These systems feature small boxmicroprocessors capable of interfacingwith PC and Mac software based on theASCOM initiative. ASCOM offers a setof interface standards and instrumentdrivers, encouraging open source shar-ing that allows astronomical softwareapplications to control a variety ofmotors, encoders, mounts, focusers andcameras.
TTeelleessccooppee MMoottiioonn aannddCCoonnttrrooll
For small to intermediate telescopesoperating within a dome or outside
under mild conditions, simple open-loopstepper control systems-or their servoequivalent with low resolution encoderson the back of gearhead servomotors-areoften adequate when used to drive tele-scopes through worm gears, belts, orfriction drives. In these cases, pure tele-scope mass and the stiffness provided bythe gearing can help resist the occasion-al wind gust. Even then, backlash andgear train compliance can easily ruin animaging session under moderate windconditions. It doesn't take much winddisturbance to cause significant trailingduring an exposure.
A portable telescope, almost by defini-tion, cannot fight external disturbancesby being massive. It can, however, fightwind gusts by utilizing "electronic stiff-ness" provided by a fast servo controlloop. Such lightweight telescopes, ifthey have stiff structures and low
Clear Aperture 700 mmEffective Focal Length 4516 mmEffective Focal Ratio f/6.45Back Focus 274 mmCentral Obstruction 41%Fully Baffled Field Diameter 60 mmPolychromatic RMS Spot 8 micronsDiameter at Field Edge from 0.36 arcsecondsRay Trace (400mm - 800mm)Vignetting at Field edge 7.5%
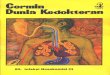
The polychromatic geometrical ray trace of the 0.7-meter CDK at threeoff-axis distances and three different wave lengths. Each small gridsquare is one-half arc second. The wavelengths used in the ray trace were400 nm, 550 nm, and 800 nm. The telescope is very well corrected over abroad band, and will be seeing limited under almost all situations.
The main performance characteristics of the 0.7-meter CDK telescope.
The diffraction performance of the 0.7-meter CDK at 550 nm. Each smallgrid square is 0.2 arc seconds. The 41% central obstruction has beenincluded in the simulation. The on-axis Strehl ratio is greater than 0.97.In other words, there is less than 3% degradation in the peak intensity ofthe full diffraction image versus the theoretical value. The Strehl ratioremains greater than 0.8 over a 20 mm field diameter.

Spring 2008 Amateur Astronomy 7
moments of inertia, allow wind gusts tobe countered-one gust at a time-on mil-lisecond time scales by the servos. Thisrequires very stiff and low inertia OTAsand mounts, ultra-high resolutionencoders on both telescope axes, andresponsive, stiff drives free of backlashand compliance.
Since gear backlash is effectivelyimpossible to counter in a high band-width servo loop, one is left with twooptions: (1) one or two stages of frictionreduction driven by a moderate-torquemotor, or (2) a direct drive systemwhere a high torque motor is mountedon each axis itself. It should be noted that
both of these approaches have been usedto good effect on large alt-az telescopes,and both should work well on smallersystems. It is, however, worth quotingPierre Bely from his classic The Designand Construction of Large OpticalTelescopes:
In contrast to all other drive mecha-nisms, in which the force is concentratedon a pinion or wheel, direct drives dis-tribute the thrust along the structure,thus minimizing localized deformationand maximizing the structural stiffness.This results in the highest drive stiffnesspossible. … Another key advantage ofdirect drives is their insensitivity tomechanical misalignment, dramaticallyreducing telescope installation time.
While challenging, we elected to usedirect drive motors and ultra-high resolu-tion encoders directly coupled to the axisand controlled by fast (wide bandwidth)servo electronics. We feel that the reduc-tion in mechanical complexity, align-ment, and maintenance afforded bydirect drive may be worth the cost of thelarge diameter motors.
Since our telescope will use tightly cou-pled motors and encoders, the servo soft-ware becomes the heart of the telescope'smotion control. As our point of depar-ture, we have chosen the current versionof Sidereal Technology's control system.The existing software is ASCOM com-pliant, so it works well with high-level"planetarium" software such as MaximDL and TheSky. We are adding hardwareand software to support the operation ofthe ultra-high resolution encoders andAC synchronous brushless motors.
DDiirreecctt DDrriivvee MMoottoorrss
Large diameter, frameless, direct drivemotors are available off the shelf.
They are, however, somewhat expensive,typically costing several thousand dol-lars per motor. They are designed to han-dle large loads at high RPM with excel-lent efficiency. For those who wish toconstruct telescopes on a limited budget,these off-the-shelf motors may beoverkill for our very low speed, modesttorque requirements. We are fortunate,however, that the permanent magnetsand coils required to construct a simple,axial flux direct drive motor are quiteinexpensive-less than $300 for a motorthat is adequate for the 0.7-meter tele-scope.
The overall performance of the telescope as a function of off-axis distance.Vignetting is in percent and the polychromatic geometric RMS image diame-ter is in microns. The performance of the telescope is excellent over a 70-mmcircle, and remains usable over an 80-mm diameter. This graph details thegeometric polychromatic RMS spot size and vignetting of the fully baffled tel-escope. The simulated wavelength range is 400 to 800 nm. It should be notedthat one arcsecond is 20 microns at the image plane for this telescope.
The primary mirror blank wil l be a fused sandwich s tructure con-sis t ing of three layers . The internal spacer layer is composed ofcircular glass disks fused to the inner and outer glass plates .

8 Amateur Astronomy #57 Spring 2008
The motors must supply sufficient torque at reasonable cur-rent to overcome wind gusts and static imbalance while accel-erating the telescope axis at the highest desired slew rate. TheNasmyth-focus configuration completely eliminates altitudeaxis imbalance associated with instruments and eyepiece, eas-ing the direct drive torque requirement for this telescope.
TToorrqquuee RReeqquuiirreemmeennttss ffoorr tthhee 00..77-mmeetteerrtteelleessccooppee
Motor drive electronics are inexpensive for peak currentsup to 5 amps, and portable telescope control systems can
be powered by two 12-volt batteries in series, so we designedour direct drive motor for 5-amps per phase at 24 volts. Undernormal usage conditions of light wind, sidereal tracking, andgood balance, the torque needed will be quite low. Thus the DCcurrent draw will also be low, eliminating the need for expen-sive, high-efficiency motors.
Although radial-flux motors have the highest efficiency andmotor constants, they also require stamped and laminated coresand machined rotors and stators. An alternative, lower cost (butlower efficiency) approach is to employ an axial-flux configu-ration with a large diameter rotor and stator. The large diame-ter is needed to supply the requisite torque. The 0.7-meter tel-escope has ample room, so no penalty is incurred for a large-diameter motor. To simplify the motor and its assembly, steel isused only under the magnets; the stator has no magnetic corematerial.
AACC SSyynncchhrroonnoouuss MMoottoorr DDrriivveerr
Most modern direct drive motors are three phase brushless,with current supplied to the phases via solid state linear
amplifiers or pulse width modulated (PWM) switches. Motor
position Hall-effect sensors often supply the position informa-tion needed by the controller to correctly phase these switches.Washing machines, air conditioning compressors, and manyother machines now use brushless DC motors. However, thissimple motor control scheme is not adequate for our situation.
For telescopes, the motors must be operated in an AC syn-chronous, servo-control mode. The position of the telescope issensed with ultra-high precision encoders on the two telescopeaxes, the position error is calculated, and the torque feedbackis computed. The three phases of the motor are then energized
based on this feedback torque. One of us (Gray) has modifiedhis Sidereal Technology control system to drive brushless ACsynchronous motors.
We have chosen to use 10-bit PWM current switches overlinear amplifiers for reasons of cost, simplicity and power effi-ciency. Although PWM drives can cause undesirable jitter atthe telescope's axes if their resolution is too low, initial analy-ses showed that a 10-bit PWM has sufficient resolution forservo bandwidths of 10 Hz or greater.
The other difficulty with high current switching is the noiseconducted on signal, power, and ground lines, and also the
The fused-sandwich mirror FEA results. In this modelthe mirror is being supported by an 18-point whiffle-tree. The peak-to-peak deformation of the mirror’ssurface is approximately 11 nm, i.e. about 1/50 of awavelength, well within the desired tolerance.
Maximum Rotational Inertia 16 kg-m2
Maximum Desired Acceleration 0.25 radians / sec2
Torque Needed for Acceleration 4 N-mApprox Torque to overcome Wind Gusts 8 N-mTorque Due top Imbalance 2 N-mPeak Torque Needed from Motor incl margin 20 N-m
The plan view of the motor. The poles of the magnets alter-nate between North and South. The coils are connected inseries in three phases, where the phases are given by thenumbers. The outside diameter of the coil support is 20 inch-es (0.5 meters). The magnets are 0.5" X 1.0" X 2.0".

Spring 2008 Amateur Astronomy 9
electromagnetic interference introducedinto nearby, sensitive components, suchas encoder read heads or CCD cameras.We will design the motor driver boardwith edge control, so that the high-fre-quency switching components will begreatly attenuated before leaving the con-troller.
EEnnccooddeerrss
Positioning errors due to wind gusts,bearing cogging, and other external
torques are removed via the servo controlsystem. The error is sensed by comparingthe desired position with the actual posi-tion, and is removed by the application ofa counteracting torque. To do so, the tel-escope must first move very slightly, andthis slight movement must be sensedbefore the correcting torque can beapplied by the control system. Typically,several encoder resolution units (ticks)must be sensed as the correction is beingapplied. Thus for sub-arc second trackingaccuracy, an encoder resolution of rough-ly 0.1 arc seconds is required (about 10million ticks / telescope revolution).
We considered two basic approachesto obtaining the requisite encoder resolu-
tion. The first was to mechanically stepup, via a large friction disk drive, a medi-um resolution encoder such as the Gurley230,000 ticks/revolution encoder. One ofus (Gray) has tried this encoder on his 14-inch alt-az telescope. One problem withthis approach, which has not beenresolved, is the periodic error induced bythe run-out of the gearing and encoder.Other issues with this approach are relia-bility (slipping and dirt) and the require-ment for the large mechanical step up.
The second approach is to place highresolution encoders directly on the tele-scope's axes. An good encoder for this isthe Mercury II made by MicroE Systems.It uses a high degree of interpolation toachieve the required resolution.
Somewhat lower in cost are stripedtapes with their associated read heads,such as those made by Heidenhain andRenishaw. Adhesive-backed stainlesssteel tapes with closely spaced lines canbe adhered to the outer edge of a disk andread by an optical read head. The diskcan have a large diameter (approximately12 inches in our case, as we have plentyof room). This naturally provides a highangular resolution.
One difficulty of using a tape inazimuth is the break in the tape. The tel-escope cannot maintain precise trackingwhen it passes over a break. There are atleast two solutions. One is to purchase acontinuous tape (somewhat expensive,and requires placement on an exact diam-eter wheel). The other is to allow the tele-scope's OTA to rotate in altitude 180degrees instead of just 90 degrees, i.e.,allow the OTA to rotate nearly horizon-to-horizon, completely passing throughthe forks. With this capability and a sim-ple software algorithm, the telescope canbe pre-positioned such that any objectcan be tracked across the sky withoutencountering the azimuth break, thusavoiding the alt-az equivalent of a GEM'smeridian flip. We plan to take this lattercourse for our telescope even though itplaces an additional requirement on themirror cell.
We have chosen to use a Renishawtape and read head on our first experi-mental motor/encoder/controller test set-up. Heidenhain or Renishaw linearencoders with 100-nm resolution on 12-inch diameter disks will be used on theprototype telescope. Such encoders willhave approximately 10 million counts perrotation-a resolution of about 0.125 arcseconds.
IInnssttrruummeenntt DDeerroottaattoorraanndd OOffff-AAxxiiss GGuuiiddeerr
For imaging, photometry, and spec-troscopy, the focal plane of an alt-az
telescope requires de-rotation. For ourpurposes it is sufficient to simply calcu-late the desired angular position as afunction of time and drive the instrumentplatform to that position. We plan to usea simple geared servo motor for drivingthe rotator.
The instrument rotator can be used topre-position an off-axis guider's (OAG's)pickoff mirror or prism on a bright guidestar. By providing a large, well-correctedfield of view (FOV), our telescope opticscan support both a large format maincamera and a large pickoff region for asizeable guide camera.
Guide-star position information can beused for low rate corrections via the tele-scope's drive system. If the guide star isbright enough, the integration time can bereduced to a fraction of a second, and
A portion of the cross section of the axial-flux motor. The coils are 0.25" thick andthe gap is 0.12". For the highest flux through the coils, the gap should be kept assmall as possible. The soft steel annulus provides a return path for the magneticflux. In this version of the motor, the coil support is non-magnetic. Higher fluxcan be achieved if the coil support is also soft steel, but this makes the motor hard-er to assemble and disassemble, and increases the thrust load on the bearings.
Magnets (32) Type N42 NdFeB, 0.5" X 1.0" X 2.0" Coils (24) 20 AWG 100-turn, L=10 cm / turnAverage Magnetic Field in Coil 0.29 TeslaForce Constant (per phase) 23 N/amp per phaseAverage Radius 0.23 metersTorque Constant 5 N-m/amp per phaseWinding Resistance 5 ohms per phase
Direct drive motor performance parameters .

10 Amateur Astronomy #57 Spring 2008
high-frequency corrections can be fed toa low-inertia deviator plate to counterthe effects of wind gusts and drive irreg-ularities not handled by the telescope'sbasic control system. Our optical designhas sufficient back focus to allow bothan autoguider pick off and a deviatorplate in the optical path.
If the autoguiding camera's FOV issmall, or if the available annulus aroundthe main camera's FOV is large, it maybe worthwhile to place the autoguidingcamera and its pickoff on a motorizedradial slide, allowing the autoguidingcamera to be moved in two dimensions,radially and rotationally. We plan onimplementing an OAG system employ-ing both of these motions.
SSttrruuccttuurree
Our 0.7-meter portable telescoperequires an especially high ratio of
stiffness to weight. Along with the usualconsiderations of precise and repeatablemotion, weight and stiffness are primaryconsiderations in our structural design.The requirement for light weight is morestringent than that of a typical mountain-top alt-az telescope, because most largetelescopes are under a dome or otherstructure that gives them significant pro-tection against the wind-typically reduc-ing wind gusts by an order of magnitude.Our 0.7-meter telescope, on the otherhand, is designed for portable or roll-offobservatory operation out in the openwhere telescopes are exposed to thewind.
In order to be portable, our telescopeneeds to be lightweight. Yet to achieveprecise pointing and tracking the tele-scope structure must also be very stiff.The stiffness requirement is manifest intwo ways. First, the structure must notbend enough to significantly degradeimage quality when subjected to distur-bances such as wind gusts. Deflectionsof the optical tube and fork cannot besensed and compensated for by the con-trol system (unless autoguiding is beingperformed by sensing guide star posi-tion). It is our goal to have the telescopeprecisely track for 5 minutes withoutautoguiding. Second, the structure mustbe stiff enough to force all mechanicalvibration frequencies to be out of theservo control bandwidth, otherwise cou-pling instabilities may result.Preliminary goals are to design a struc-
ture: (1) that will hold the telescopepointing angle to within 1 arcsecondRMS for wind gusts from 0 to 10 knots,(2) where all vibration frequencies aregreater than 10 Hz, and (3) that willallow unguided exposures of 5 minuteswith 1 arc second accuracy.
The tolerances for the structure canbe divided into two categories: thosewhich cause repeatable errors and thosewhich cause non-repeatable errors. Wecan relax our tolerances with respect tothe former somewhat, as the trackingsoftware can be programmed to compen-sate for repeatable errors such as theflexure of the optical tube as a functionof altitude. Non-repeatable errors, suchas the slipping of bolted joints or run-outin bearings, must be designed out of thesystem and will receive close attention.
Although the details of the tele-scope's optical and control systemdesigns are firming up, the structuraldesign is just beginning. At this point intime, we expect that the top ring of theOTA and the truss tubes will be madefrom carbon fiber composite, which hasthe highest stiffness-to-weight ratio ofany readily available material. The OTAmidsection and forks will likely be madefrom either welded metal plate or carbonfiber composite. The choice will be atradeoff between the lower cost and eas-ier fabrication of metal, or the higherstiffness per weight of a carbon fibercomposite structure.
IInnssttrruummeennttaattiioonn
Our multi-use telescope must bedesigned to accommodate a variety
of instruments. In typical applicationsenvisioned for this telescope, we expectthat one of the Nasmyth ports will be uti-lized for CCD cameras and eyepiece,while the other port will host largerinstruments such as spectrographs.
Specialized instruments are oftenquite bulky and heavy-one reason wewent with a Nasmyth optical configura-tion-but their complexity and require-ment for precise adjustment precludethem from being repeatedly installed andremoved from the telescope, hence therequirement for two Nasmyth ports.
VViissuuaall AApppplliiccaattiioonn
Newtonian optics have long been themainstay of amateur Dobsonians,
but the height of the eyepiece discour-ages some observers. In contrast, foldedCassegrain designs offer an eyepieceposition that allows seated observing atthe Nasmyth focus. Perhaps its onlydrawback is a small loss of light by thethird reflection from the tertiary mirror,but the increased comfort of seatedobserving should make this a good trade-off.
PPoorrttaabbiilliittyy
We are currently evaluating threeways to design the telescope to be
portable: Our requirement for the 0.7-meter alt-az telescope is easy setup andtakedown by two people using a pickuptruck, van, or trailer for transportation.
1.) Break down the telescope into small,lightweight parts that are easily carriedand readily assembled. In this approachthe maximum weight for a single unit

Spring 2008 Amateur Astronomy 11
would be about 100 pounds. Althoughthis implies that a large scope could betransported in a relatively small vehicle,it would also require the most assemblyand disassembly time. In addition, thestructure of the connection points wouldneed to stand up to repeated use. Userswho are well versed in putting togetherand taking apart the scope could makethis a viable option, but it may be theleast attractive way to make it trulyportable.
2.) Keep the largest and heaviest partstogether and move this assembly ondeployable casters. In this scenario, onlythe upper cage and truss tubes would beassembled and disassembled, much likelarge Dobsonian telescopes. Deploymentwould either need two people or a winchor Tommy Gate to mechanize the lifting.One of the benefits of this method wouldbe that the optics are moved while hori-zontal, and thus are well supported andprotected by their respective cells.Noting that Dobsonians up to 1 meterhave been moved this way, a feasibleupper weight limit is perhaps 500pounds. Using a wheelbarrow-likeapproach has a manageable upper limitof about 300 pounds if two people areavailable for setup and breakdown.
3.) Transport the fully assembled tele-scope in one piece. This option requires alarge trailer with an excellent suspensionand lift, but is certainly achievable today.In this approach the OTA would likely bepointed horizontally for transportation,which could place uncomfortably largeedge stresses and vibration on mirrorsand their cells.
Taking portability into account dur-ing the design of the telescope is vital.Whether a large telescope is moved afew times or many hardly mattersbecause when portability and ease ofsetup is required, it becomes one of themost important attributes of the tele-scope.
TThhee FFuuttuurree
Over the next six months we plan tofabricate and test the key compo-
nents of the azimuth subsystem: theazimuth bearing, direct drive motor, andhigh resolution disk-tape encoder. Roweis building the motor, while Gray is fab-ricating the driver. The completed unit,including the azimuth bearing fromImpact Bearings, will be tested first at
Sidereal Technology and then at TrustAutomation.
During the same time period, Liu atHubble Optics will be fabricating andtesting the complete optical system (pri-mary, secondary, and tertiary mirrors,and the corrector lenses). Also, Ridgely,Widmann, and their students atCalifornia Polytechnic State Universitywill be designing and fabricating por-tions of the telescope's structure.
At the Small Telescope &Astronomical Research (STAR)Conference, June 19-22, 2008, in SanLuis Obispo, California, we will presenta special session covering most aspectsof the alt-az project and its 0.7-meterprototype (for details, seewww.STARConference.org). Most of thetalks from this special session will beincluded as chapters in the book-lengthconference proceedings. The STAR con-ference will be followed, seven monthslater, by a major conference in Hawaii,Galileo's Legacy: Small Telescope sci-ence 1609 and 2009(www.GalileosLegacy.org).
Looking further into the future weforesee several possibilities. The firstwill be the completion and exhaustivetesting and evaluation of the 0.7-meterprototype. We hope this will be followedwith the manufacture, by one or morefirms, of affordable systems and, hope-fully, the increasing construction of suchtelescopes by amateur telescope makers.
With the 0.7-meter prototype underour belt, we are anticipating that wewould then design, fabricate, and test a1.0-meter prototype-a similar but scaled-up version of the 0.7-meter telescope. Weare also contemplating a 0.5 meterNewtonian prototype with an f/4 hyper-bolic primary and a two element correc-tor. It is our intent to provide usefulinformation not only to manufacturerswho may be able to afford off-the-shelfcomponents, but to amateur telescopemakers who, on a very tight budget,would prefer (and enjoy) making thecomponents themselves.
Whatever the future might hold forour project, we feel that the time is ripefor the alt-az revolution that began withlarge mountaintop telescopes to beextended to modest aperture, lower ele-vation telescopes for research, astropho-tography, and education. We plan to

Spring 200812 Amateur Astronomy
place what we learn in the public domainand welcome others to join our informaldevelopmental group or initiate theirown projects.
RReeffeerreenncceessBely, Pierre. 2003. The Design andConstruction of Large OpticalTelescopes. New York: Springer.Genet, Russ. 1982. Real Time Controlwith the TRS-80. Indianapolis: HowardSams.Genet, Russ, Dan Gray, Howard Banich,Dave Rowe, Tom Smith, and TomKrajci. 2007. Alt-Az AerospaceTelescopes: For Research,Astrophotography, and Education.Amateur Astronomy. 56, Winter.Trueblood, Mark, and Russ Genet. 1985.Microcomputer Control of Telescopes.Richmond: Willmann-Bell.-------, 1995. Telescope Control.Richmond: Willmann Bell.
AAcckknnoowwlleeddggeemmeennttss
We are pleased to thank HubbleOptics for supplying the complete
set of optics for the prototype,PlaneWave Instruments for the donation
of considerable time and effort for theSolid Works 3D model and images, TrustAutomation for supplying a test readhead and encoder tape, and ImpactBearings for supplying the azimuth andaltitude bearings. We are also pleased toacknowledge editing by Vera Wallen.
TThhee AAuutthhoorrss
David Rowe is Chief TechnologyOfficer and Co-founder of Sierra
Monolithics. An avid amateurastronomer, optical designer and ATM,Dave has designed and fabricated manytelescopes, including a corrected Dall-Kirkham, a flat field concentric SchmidtCassegrain, and several Schmidt cam-eras and corrected [email protected]
Russ Genet is Research Scholar inResidence at California Polytechnic
State University, and Adjunct Professorof Astronomy at Cuesta College. Thefounder and former Director of theFairborn Observatory, Russ and LouisBoyd pioneered the development ofrobotic telescopes. Author of severalbooks on astronomy and telescope con-
trol, Russ was the 51st President of theAstronomical Society of the Pacific.www.OrionObservatory.org.
Dan Gray is President and Directorof Engineering of both Technical
Marine Service (TMS), and SiderealTechnology. Dan founded TMS, amarine controls company, in 1987, andSidereal Technology in 2003. He hasinnovatively developed many types ofcontrol systems for ocean-going vesselsas well as telescopes. An active tele-scope maker for 30 years, Dan createdand popularized the "string" telescope.w w w. S i d e r e a l Te c h n o l o g y. c o m ,www.tms-usa.com.
Rick Hedrick is President ofPlaneWave Instruments, which was
founded in 2006 by Rick and JosephHaberman. Rick has over 21 years ofexperience in telescope design. Heworked for 11 years as the ChiefTechnology Officer and previous ownerof Celestron where he was responsiblefor developing Celestron's award win-ning Schmidt-Cassegrain computerizedtelescopes. Getting a product like theCDK into the hands of serious imagersand amateur astronomers has been a

Spring 2008 Amateur Astronomy 13
shared vision of Hedrick and Habermanfor many years. www.planewaveinstru-ments.com.
Bob Peasley is a MechanicalEngineering Consultant and former
mechanical engineer for Celestron. Bobis also a professional photographer whoprovides images of products forCelestron's brochures and website aswell as other companies in SouthernCalifornia. Bob recently relocated toTaylor, Utah.
Tong Liu is President of OptelEngineering Group Inc. which
includes Hubble Optics (founded in2002). Tong has developed HubbleOptics' innovative lightweight sandwichmirrors. He has broad experience inoptics manufacturing. www.hubble-optics.com.
Ty Safreno is Chief ExecutiveOfficer and Chief Technical Officer
of Trust Automation, an internationalcompany specializing in high precisionservo systems. Trust Automation is theworld leader in linear servo amplifiertechnology. Ty has had an interest inastronomy and telescopes for manyyears. [email protected]
John Ridgely is an associate professorof mechanical engineering at the
California Polytechnic State Universityin San Luis Obispo, California. He spe-cializes in the design of mechanical sys-tems which are controlled by computers.
Howard Banich is a SeniorDevelopment Engineer with Nike,
and has been an ATM since 1969. His28-inch Newtonian portable telescopehas several features relevant to light-weight alt-az telescopes. His telescope iscurrently undergoing general drive andstiffness upgrades based on this article.http://hbanich.googlepages.com.
Tom Krajci (Major, USAF retired) isan amateur scientist specializing in
photometry. He operates theAstrokolkhoz Observatory at an eleva-tion of 9,440 feet near Cloudcroft, NewMexico. Tom is translating severalbooks on telescope making and opticsdesign from Russian into English,including the works of DmitryMaksutov.http://overton2.tamu.edu/aset/krajci/.
Tom Smith is the Director of theDark Ridge Observatory in New
Mexico. Tom is a retired nuclear mainte-nance supervisor and senior softwareprogrammer as well as an advancedamateur astronomer. Tom establishedthe Dark Ridge Observatory as a non-profit organization in Weed, NewMexico, and has been working with stu-dents and faculty from several collegesand universities as a mentor for CCDphotometry and image data reduction.Tom also conducts research on eclipsingbinaries.www.DarkRidgeObservatory.org
Jim Widmann in an associate profes-sor of mechanical engineering at
California Polytechnic State Universityin San Luis Obispo, California. Hisareas of expertise are mechanical engi-neering design, mechanics, fluid powercontrol, and design optimization. Hisindustrial experience includes designengineering at L&F Industries, a worldleader in the design and construction oflarger research-grade optical telescopemounts. Jim organizes and teaches theMechanical Engineering Design Projectcourse at Cal Poly.
Xiao-Hua (Helen) Yu is an associateprofessor in the Dept. of Electrical
Engineering at California PolytechnicState University in San Luis Obispo,California. Her research specialtiesinclude stochastic control systems, com-putational intelligence, and digital signalprocessing.
Joe Haberman Is Vice President ofPlaneWave Instruments. An avid ama-
teur astronomer, Joe started makingoptics in the early 1990s as an amateurtelescope maker. He eventually startedhis own optics company, HabermanOptics, and built a reputation for makinghigh quality, large aperture paraboloidmirrors. Joe went on to become the mas-ter optician at Celestron before co-founding PlaneWave Instruments in2006 with Rick Hedrick.www.planewave.com
Mel Bartels is a software architectand former musician and teacher.
He ran the Amateur Telescope Makerslistserv for six years, a worldwide groupsharing the art of telescope making. In1988 Mel began developing a freely dis-tributed telescope control system that isin use worldwide. He has ground mir-
rors up to 30" in size, leads mirror mak-ing classes, and conducted a workshopwhere attendees figured 16" mirrors.His interest in innovative mountingdesigns led to popularizing ultra-lightswith single upper rings in 1994 andinventing the TriDob in 2003. A speak-er at astronomical conferences eachyear, his telescope walkabouts at theOregon Star Party are a highlight thatattract hundreds annually. TheInternational Astronomical Unionnamed asteroid 17823 Bartels for hiscontributions to amateur astronomy.
Richard Berry is the former editor-in-chief of Astronomy magazine,
the founder and editor of TelescopeMaking magazine, and the author of adozen or so books on amateur astrono-my, including The Handbook ofAstronomical Image Processing (withJim Burnell), The Dobsonian Telescope:A Practical Manual for Building LargeAperture Telescopes (with DavidKriege), and editor of Telescope Optics:A Comprehensive Manual for AmateurAstronomers by Harrie Rutten andMartin van Venroiij. www.wvi.com/~rberry.
Richard Kay is President of ImpactBearings. His company, with six
plants in the Los Angeles area, makesthe bearings that many other bearingcompanies sell. His experience includesbearings for large telescopes and, close-ly related, satellite tracking systems.Richard is an astronomy enthusiast.www.impactbearings.com.
Craig Breckenridge is a designer andSquad Leader at Dynamic Structures
in Port Coquitlam, British Columbia. Hehas participated in the design, fabrication,and construction of some of the world'slargest telescopes and enclosures. He is anactive member of the amateur telescope-making community, having designed andbuilt several small aperture telescopes forhis own use. Craig was instrumental in thedesign and construction of the 0.5-meterCassegrain at the H. R. MacMillan SpaceCenter and is Chairman of the ChrisGraham Robotic Telescope group thatremotely operates a 20" RCOC Cassegrainat New Mexico Skies and a TakahashiEpsilon 210 at Pingelly, Western Australia.
Jolyon Johnson is studying astronomyand is a member of a physics research
seminar at Cuesta College led byProfessor Genet.