Embed Size (px)
Citation preview

Pore pressure estimation by using a modified boundary element methodWildney W. S. Vieira, Egor Sibiryakov∗, Boris Sibiryakov∗ and Lourenildo W. B. Leite, UFPA, Brazil, RAS-NSU∗, Russia∗
Copyright 2017, SBGf - Sociedade Brasileira de Geofısica.
This paper was prepared for presentation at the 15th International Congress of theBrazilian Geophysical Society, held in Rio de Janeiro, Brazil, 31 July to 3 August, 2017.
Contents of this paper were reviewed by the Technical Committee of the 15th
International Congress of The Brazilian Geophysical Society and do not necessarilyrepresent any position of the SBGf, its officers or members. Electronic reproductionor storage of any part of this paper for commercial purposes without the written consentof The Brazilian Geophysical Society is prohibited.
Abstract
This paper resumes a research for solving numericallya three-dimensional problem of elastic stationaryoscillations, with a particular application to the casepore pressure in sedimentary rocks. The methodcan be used not only for applications in oil and gasexploration, but also for modeling buried structuresand structural components such as foundations,tunnels, trenches, cavities, etc. The basis of thismethod is the construction of integral equationskernels as a response to an analogue Delta loading,or to its derivatives. The finiteness of the kernelsgives the possibility to increase accuracy in manyorders, and to solve the elastic problem in the caseof discontinuity in the normal vector to the contouringS surface to the goal volume V . As an example, weshow that the variation of the characteristics of thestatic stress state under the influence of pore pressuredepends essentially on the contact geometry, and alittle on the type of boundary condition at the contact.
Introduction
This paper concerns the application of the theory ofthe linear elastic mixed boundary value problem (MBVP)of solids aiming at geological basin modeling withapplications to oil and gas exploration, as decribed bySibiriakov et al. (2016). We look, among other goals,for mapping low and high pressure zones that serve asnatural suction pumps, where a reservoir is necessarilyrelated to a low pressure zone in the subsurface, besidesthe necessary geological conditions. We also deal severalaspects of the theory for a typical reservoir model as anumerical experiment about effective pore pressure, andthe specific application in this paper is the problem ofthe effective pressure (peff) and anomalous high porouspressure (ppor).
The problem is to calculate the stress-strain distribution insolids, modeling a sedimentary basin, using maps of vP(x)and vS(x) velocities, and density ρ(x).
The real data can be obtained from special surveyswith 3D sensor components, where a large amount of Pwave information is conventional. The S wave velocityinformation can also be obtained from VSP technology, andby petrophysical measurements (Biondi, 2010; Galperin,1985).
To solve the elastic problem is necessary to know theboundary geometries, and the distribution of the elasticparameters in the subsurface. The present modelconsiders only isotropic layers, and the model is discretizedin an uniform 3D grid, where the layer cells forming thegeological structure have constant elastic parameters.
Methodology
The construction of the physical problem starts withthe elastodynamic wave propagation equation in theCartesian system with (i = 1,2,3;x,y,z), where u(t,x) is thedisplacement vector with components ui(t,x), consideringthe case of oscillatory temporal condition ui =Uieiωt :
∆Ui + k2Ui +λ +µ
µGradiDivU = 0, (k2 =
ρ
µω
2), (1)
where ∆Ui is the Laplace operator on the displacement uiand Ui; λ and µ are the Lame linear elastic strain-stressmoduli; ρ is the body volume density; and ω the angularfrequency of stationary oscillations.
The loading vector components, pi = σin0 (traction orcompression), are the pressure (force per unit area)components expressed by the formula
pi =k=3
∑k=1
σiknk = σin0 , (2)
where σik is the stress tensor, nk is the projection cosinealong the unit normal vector n to the S surface, and σin0
can be calculated by Hooke’s law, and also by the rule oftensor projections; therefore, the loading is not defined bythe simple normal stress. A complementary expression forσik is given by
σik = λDivUδik +µ(∂Ui
∂xk+
∂Uk
∂xi), (3)
DivU = θ =∂Ui
∂xi+
∂U j
∂x j+
∂Uk
∂xk. (4)
In practical terms, if we have a reservoir at depth z0(say, 2000m) we can calculate the loading pi = σiknk ifwe have the displacement vector to calculate the straintensor, and by Hooke’s law calculate the loading pi. Wecan also use the effect of the gravity weight to calculatethe loading, because in this case, we are solving for thenonhomogeneous equation of equilibrium given by
µ∆Ui +(λ +µ)GradiDivU =−ρgδiz, (5)
under the condition that pi = 0 at the surface (z = 0). But,the atmospheric pressure can be assigned to the normalcomponent, and zeros to the tangential components.
The solution for equation (1) is found in the form of aconvolution with a kernel that satisfies the equation at any
Fifteenth International Congress of The Brazilian Geophysical Society

SEISMIC WAVES IN POROUS MEDIA 2
fixed point x0 of a closed volume V , that can be arbitrarilyclose to the enclosing S surface. The integration is carriedout over the position variable x, and calculated with asurface element dSx; i.e.,
Ui(x0) =∫
SMik(x0,x)Fk(x)dSx, (6)
where Mik(x0,x) is the Green’s tensor (also called Green’sdyadic) function, F corresponds to the called the potentialvector, or fitting boundary vector, and the displacementvector U is calculated such that the displacement satisfiesequation (1), and the boundary conditions (Eskola, 1992).
One classical description for the tensor Mik in formula (6) isgiven by Kupradze (1963) for a 3D full-space (free-space),as the tensor of the fundamental solution for equation (1)given by
Mik(x0,x) = 1µ
(cos(kr)
r δik +1k2
∂ 2
∂xi∂x j
[cos(kr)
r − cos(γkr)r
]), (7)
where δik is the Kronecker delta, and
r =√(x0− x)+(y0− y)+(z0− z) (8)
is the distance between the fixed, x0, and integration,x, points; γ = vS
vP=√
µ
λ+2µvelocity ratio, and xi are the
projections of the vector r directed from the fixed point x0 tothe integration point x for the Cartesian coordinate system(x,y,z). For the static case, i. e., for kr� 1, the full-spacetensor (7) is simplified to the a fundamental solution withthe form
Mik(x0,x) = 12µ(λ+2µ)
[(λ +µ) ∂ r
∂xi∂ r∂xk
+(λ +3µ)δik
]1
r(x0 ,x), (9)
that has several disadvantages due to non-integrablesingularities, except for the term with the Kronecker δikfunction.
The loading Pik(x0,x) is obtained with respect to the stresstensor Mik of formula (9), and it is given by
Px0{Mik}(x0,x) = 2µ
∂Γik∂n0
+λn0Divx0(Γik)
+µ[n0,Rotx0 Γik],(10)
where the essence being to calculate the loading vector atthe fixed point x0, the first term is the directional derivative( ∂
∂n0), the middle term includes the divergence of Γik,
and the last term is the cross product between n0 andRotx0(Γik), that results in
Pik(x0,x) = 1λ+2µ
{[µδik +3(λ +µ) ∂ r
∂xi
∂ r∂xk
]∂
∂n01r
+µ
[cos(n0,xk)
∂
∂xi
1r − cos(n0,xi)
∂
∂xk
1r
]},
(11)where n0 is the unit normal vector at a fixed point x0 on theS surface.
The loading tensor (11) gives the possibility to find asolution for the MBVP of the second kind, where theloading vector pi is known on the boundary, what isnecessary to find the displacement vector in the volume V .In this case the problem is reduced to finding a solutionfor the system of the 2D integral equations that are notregular, but singular integral equations; i.e., the kernels are
not integrable, and the integrals should be calculated in thePrinciple Value (P.V.) sense, and the last term in the loadingtensor (11) causes this mentioned singularity. In practice,the use of such type of kernels are the cause for loosingaccuracy.
Now we discuss the shortcomings of the fundamentalsolutions. If the loading vector pi is known on the S surface,it is possible to calculate the correspondent potentialvector, Fk, (k = 1,2,3), by solving the system of integralequations of the Fredholm type of the second kind given inthe form
pi(x0) = Fi(x0)−1
2π
∫S
Pik(x0,x)Fk(x)dSx, (12)
then as a result it becomes easier to calculate thedisplacement vector U by using the integral (6). Thequantity pi is given by formula (2), and Pik by formula (11).
The displacement means the amplitude responses for thehalf-space, under the condition that the surface normal δ -loading, pn = δ (S), is given by
δ (S) =− 12π
∫∞
0krJ0(krrτ )dkr, (13)
where kr is the mnemonic integration variable (k is theeffective spatial frequency corresponding to the S waves).Also, all the dimensions of the involved quantities, δ (S),pi, Mik, Pik, Γik, are compensated by the dimension of thepotential vector F.
The finite analogue of Delta function can be written as
δ1(S) =−1
2π
∫ kr=N
kr=0krJ0
(rτ
√k2
r +2k2)
dkr. (14)
The limits of integration is now from 0 to the inverse of thesampling interval, i. e., N ∼ h−1. Formally, the finitenessof the kernel causes the necessity to solve the Fredholmequation of the first kind (loosing conditioning) for findingthe potential vector, and also loosing completeness.
On the contact skeleton-fluid the normal component ofthe loading vector is equal to the fluid pressure, and thetangential components of the loading vector are equal tozero (pn = p0, pτ1 = pτ2 = 0). On the interface betweentwo solid bodies, there are two main types of boundaryconditions, rigid and slip.
The rigid contact means that there are no net forceson the interface and, despite of the interface existence,the displacement vector is continuous, and the vectorsummation of the loading vector is null. Taking into accountthat the external normal vector changes sign, and thetangential vectors coincide on the upper and lower layers,it means that:
1. U+n =−U−n , U+
τ1 =U−τ1, U+
τ2 =U−τ2,
2. p+n = p−n , p+τ1 =−p−
τ1, p+τ2 =−p−
τ2.
The symbols “+” and “-” stand for the upper and lowerlayers with respect to the S surface.
The slip contact (that can have a modification to includea friction coefficient) means that the tangential forces arezero, and only the normal component of the displacementvector is continuous, that is:
Fifteenth International Congress of The Brazilian Geophysical Society

VIEIRA ET AL. 3
1. U+n =−U−n ,
2. p+n = p−n , p+τ1 =−p−
τ1 = 0, p+τ2 =−p−
τ2 = 0.
It should be clear enough that the mixed type of boundaryconditions (with rigid and slip conditions) are the mostimportant ones for geophysics.
The Static MBVP
The new displacement tensor components give results forthe static case (k→ 0) for the half-space in the form:
Mnn =∫ N
0J0(krrτ )
exp(−|x1|kr)
4πµ(1− γ2)
(1+ kr|x1|(1− γ
2))
dkr, (15)
Mnr =∫ N
0−J′0(krrτ )
exp(−|x1|kr)
4πµ(1− γ2)
(−γ
2 + kr|x1|(1− γ2))
dkr, (16)
Mrn =∫ N
0−J′0(krrτ )
exp(−|x1|kr)
4πµ(1− γ2)
(γ
2 + kr|x1|(1− γ2))
dkr, (17)
Mrr =∫ N
0
[2J0(krrτ )(1− γ
2)+ J′′0 (krrτ )(1−2γ2)
+kr|x1|(1− γ2)J′′0 (krrτ )] exp(−|x1|kr)
4πµ(1−γ2)dkr,
(18)
Mϕϕ =∫ N
0
[J0(krrτ )− J′′0 (krrτ )(1−2γ
2)
−kr |x1|(1− γ2)(J0(krrτ )+ J′′0 (krrτ ))] exp(−|x1 |kr)
4πµ(1−γ2)dkr .
(19)
Solving the MBVP, the boundary conditions should besatisfied. In the first step (and in the main ones) ofcomputing the potential vector, the fixed point, x0, is on thesurface (on the volume boundary). If the potential vector,Fk, is already known, for computing the other parameters(strains or stress), then the fixed point is inside the volumeV . It may be difficult to digest that inside the volumeV of a homogeneous medium there are no normal andtangential vector components, and in this case (i. e., for thecalculation of displacements or strains inside the volume)these components have the meaning of a virtual (not real)surface inside the volume.
Effective Pressure, Rigid and Slip Contacts
Often, the effective properties, peff, of porous granularmedia does not depend on the confining (external)pressure, pconf, but on the difference between confiningand porous, p0 = ppor, (fluid) pressures, as peff = pconf− p0.
The opinion that porous pressure opposes theapproximation of contacts is not correct, becausepressure is a scalar quantity, and only surface forcescan approximate or separate contacts. Sometimes itis necessary to use a dimensionless factor of unknownnature for peff.
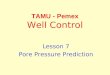
Now, let’s consider the physics for a minimumrepresentative volume which consists of grains withflat contacts (called here platforms) as shown in figure 1.The problem is that porous pressure (p0) in granular mediacan cause two opposite processes. As a first case, it isto increase the distances between grain centers, and thiseffect is significant around the edges (indicated in the rightside of figure 1). As a second case, it is to decrease thedistance between grain centers (indicated in the left side offigure 1). The question that we raise here is, which effectis stronger and prevails?
Figure 1: Geometry of grains with a contact surface, calledplatform by being flat, and the force distribution around thesurface shown by arrows.
In the literal sense, granular media is not continuous.Of course, this means that we can have some averageeffective properties, but it is impossible to understandthe dependence of the effective properties on externalparameters in the framework of continuous medium byusing “average” forces in every point.
In order to analyze the dependence of the effectivepressure (peff) on porous pressure (p0), and on thestructure of the porous state, it is necessary to solve thestatic elastic problem of the mixed boundary type. Theboundary conditions described for the part of the grain(spherical) that is in contact with fluid is obvious; i.e., thenormal component of the loading vector is equal to theporous pressure, and the tangential components are zero.
As for the boundary conditions for contact platforms,between grains, there are two variants: (1st) the rigidcontact (platforms are welded), where the displacementvector is null; (2nd) slip contact, where the normalcomponent of the displacement vector and tangentialcomponents of the loading vector are null. So, the effectivepressure (peff) is composed by the confining pressure,and by the average normal loading vector on the contactplatforms.
Numerical Example
Now, it is interesting to solve this problem for a grain with6 contact surfaces, as described below. This experimentgives an opportunity to test not only the new tensordisplacement formulas (15-19), but also to understand thedependence of the effective properties of granular mediaon the contact area (platforms), and on the type of theboundary conditions.
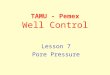
The S surface corresponds to a sphere of unit radius withsix contact platforms, as shown in figure 2. The size ofthe platform is determined by the parameter h0, that isthe distance from the sphere center to the center of thecontact platform. The surface parametric equation for thex-coordinate is, for example, given by if sinθ cosϕ > h0, then x = h0,
else if sinθ cosϕ <−h0, then x =−h0,else x = sinθ cosϕ.
(20)
Similar relations hold for the y and z coordinates. Suchsurface assigning is more convenient than assigning 7surfaces (6 flat platforms and 1 that corresponds to theremaining of the sphere in contact with the fluid). Theplatform contours are not circumferences, instead theyare close to a polygon (see figure 3). To construct the
Fifteenth International Congress of The Brazilian Geophysical Society

SEISMIC WAVES IN POROUS MEDIA 4
Figure 2: The clipped ball model with six flat contactareas (platforms) represented in Cartesian coordinates(x,y,z), and to be submitted to stress loading and boundaryconditions.
surface is necessary to run over the parameter θ from 0to π rd (radians as on spherical coordinates), and over theparameter ϕ from 0 to 2π rd.
Figure 3 is the Indicator surface presented to clarify thenext figures, the role of the parameters θ and ϕ, andh0 = 0.8. The indicator parameter is given by I = 1 for theplatform (solid-solid contact), and by I = 0 for the remainingpart of the sphere (solid-fluid contact).
The problem is reduced to the elastic mixed type boundarycondition to calculate the average normal component ofthe loading vector on the platforms (solid-solid contact)for different values of h0 (i.e., different areas of contact),and for different boundary condition (solid-solid, eitherrigid or slip conditions). The average normal componentcorresponds to a second summation to obtain the effectivepressure (peff).
The Lame parameters and the porous pressure were setequal to 1; therefore, the result is proportional to p0. Thegrid was defined with 59 mesh nodes for the parameter θ ,and 60 for the parameter ϕ (i.e., the intervals were hθ = π
60and hϕ = π
30 ). The h0 parameter had values set to: 0.8,0.85, 0.9 and 0.95. Also, the numerically calculation wasperformed for the two mentioned types of conditions (rigidand slip boundaries). The size of the final matrix (for thecalculation of the potential vector by matrix inversion) was10620×10620. This matrix includes either the computationfor
pi(x0) =−∫
SPik(x0,x)Fk(x)dSx,
or forUi(x0) =
12π
∫S
Mik(x0,x)Fk(x)dSx,
and the selection depends on the boundary conditions. Ifthe potential vector F is known, then the loading vectorgiven by
pi(x0) =−∫
SPik(x0,x)Fk(x)dSx,
can be calculated. The average of the normal componentof the loading vector is calculated by integration over thecontact platforms by
pn(x0) =1S
∫S
pn(θ ,ϕ)I(θ ,ϕ)dS, (21)
where S is the total surface area.
Figure 3 stands as another representation of the clippedball model associated with the S surface for analysis ofdiscontinuities. In this case, it is represented in the θ and ϕ
coordinates by the I-indicator, that means: I = 1 for the flatcontact area, and I = 0 for the spherical area. The surfaceparameter height is h0 = 0.8. The boundary conditions forboth I-cases are as follows:
1. if the point is on the spherical side of figure 2, andon the area for I = 0 of figure 3, then the normalcomponent of the loading vector, (pn, equation (2),is equal to the pore pressure (pn = p0), and thetangential components are zero (pτ = 0).
2. if the point is on the flat side of figure 2, and on thearea for I = 1 of figure 3, then the normal componentof the loading vector, (pn, equation (2), is equal zero(pn = 0), and either the tangential components of thedisplacement vector are zero (rigid contact condition,Uτ = 0), or the tangential components of the loadingvector (pτ , equation (2) are zero (for slip contactcondition, pτ = 0).
Figure 3: Discontinuity surface images of the clipped ballmodel with six flat areas of figure 2 in the θ and ϕ
cylindrical coordinates using the I-indicator function, withthe conditions: h0 = 0.8; I = 1 in the flat contact area;and I = 0 on the boundary part with the presence of fluid.The amplitude scale shows 1 and 0, and the six polygonalshapes of the flat contact area. On the two lateral partsI = 1, and have an extended flat form.
The singularity of the kernels (despite of the singularitytype) causes in all cases the necessity for calculatingimproper integrals. This means that it is necessary to addto the numerical summation an additional term based onan analytical calculation (an integral on a small area thatincludes a point of function singularity). But, the accuracyof such additional term is low enough (h2); therefore, itmakes no sense using high order integration formulas; thatmeans, stay with Simpson quadrature.
The finite kernels give the possibility to answer interestingquestions about the dependence of the accuracy of theelastic problem solution, and about the integration formulafor accuracy estimation. The question is: Is it justifiable touse high order formulas for the integral calculation? Theanswer is based on the found results that showed to bevery interesting and surprising.
Different integral formulas give different potential vectors,but the loading vectors (final result of the elastic problem
Fifteenth International Congress of The Brazilian Geophysical Society

VIEIRA ET AL. 5
solution) proved to be identical, and the maximumdifference was in the order of 10−9. The question nowis: What is the reason for this type of result? Theanswer is that in this case the integral is approximatedby a finite summation, also the kernel satisfies theequation of equilibrium exactly, and the dependencebetween displacement and loading vectors are calculatedanalytically, i.e., it is also exact. For example, if in theformula
pi(x0) =−1
2π
∫S
Pik(x0,x)Fk(x)dSx,
we denote Fk(x)dSx as a new Fk(x), it means that theaccuracy of the Ui(pi) does not depend on the order of theintegration formula (of course, if the displacement vectoris calculated by the same integration formula); therefore, itmeans that there is no need to calculate integrals.
It is possible from the beginning to use summations, e.g.,instead of integrals, use a form like
Ui(x0) = ∑S
Mik(x0,x)Fk(x),
where the summation is over the surface integration points.The loading vector depends on the displacement vectoranalytically; i.e.,
pi(x0) =−∑S
Pik(x0,x)Fk(x), (22)
where Pik(x0,x) is the loading vector under the conditionthat Mik is the displacement tensor.
So, by changing the classical Delta function by a finiteanalogue for the numerical methods gives the possibilityto solve the elastic problems with mixed type boundaryconditions (not only the static, the dynamic also), and touse finite summation for the solution instead of integrals.
Results
Figure 4 shows only part of the huge matrix to calculate thepotential vector for the clipped ball calculated by the linearsystem given by the formulas (15-19). The problem is ofthe mixed type, and this figure is a part of the matrix ofthe system, that contains both Mik and Pik and projections,where the mentioned part contains Pik with the large values,and Mik with the smaller values. The model parameter wasset as h0 = 0.85, boundary conditions of rigid contact, andthe result of the matrix inversion was stable and reliable.
Figure 5 shows the normal component of the potentialvector (for the same conditions as in figure 4). The smallabsolute values of the potential vector is caused by usingthe formulas
Ui(x0) = ∑S
Mik(x0,x)Fk(x), (23)
instead of,
Ui(x0) =1
2π
∫S
Mik(x0,x)Fk(x)dSx, (24)
that means the absence of the multiplication by the surfaceelement dSx, that would be compensated by multiplying bythe large values of Mik.
Figure 6 shows the normal component of the loadingvector, pn, under the same conditions as given in figures
4 and 5, as a result of the convolution of the potentialvector, Fk(x), with the modified stress tensor, Pik(x0,x), ofthe fundamental loading; i. e.,
pi(x0) =−∑S
Pik(x0,x)Fk(x). (25)
It is visible that the loading depends slightly on theparameter ϕ, and this means that the contacts areinteracting with each other. With a further decrease in thesize of contacts (i. e., by increasing the parameter h0),the loading (on the upper and lower platforms) ceases todepend on the ϕ coordinate.
700
750
800
700
750
800
0
2
4
x 104
XY
Ma
trix
am
plit
ud
eFigure 4: Fragment of the huge matrix system (15-19)that contains Pik (large values) and Mik (small values) forcalculating the potential vector Fn(θ ,ϕ), for h0 = 0.85 andrigid contact.
00
0
3
x 10−5
θ ϕπ
2π
π
π/2
Fn
Figure 5: Dependence of the normal component of thepotential vector, Fn, for reliability and stability. This resultsays that it is a pleasant fact that the part of the surfacebordered by the fluid, where the normal loading was welldefined, did not change after the numerical calculations forthe potential vector Fn. The values were: h0 = 0.85; and theparameters θ and ϕ: 0≤ θ ≤ π (left axis), 0≤ ϕ ≤ 2π (rightaxis).
In all cases, the normal component of the displacementvector was defined on the contact solid-fluid (on a part ofthe whole surface). Also, the loading vector was computedby using a formula of the type pi =−∑Pik(x0,x)Fk(x) (for thewhole surface, including the part where the loading vector,pi, was defined). From one point of view, the calculatedloading vector on the contact fluid-solid was coincident withthe prescribed conditions, and almost absolutely.
Fifteenth International Congress of The Brazilian Geophysical Society

SEISMIC WAVES IN POROUS MEDIA 6
00
0
1 n
π
p
ππ/2
2π
θ ϕ
Figure 6: The normal component of the loading vector pnfor h0 = 0.85, as a function of the 0 ≤ θ ≤ π (left axis)and 0 ≤ ϕ ≤ 2π (right axis) parameters. The borderswith fluid have loading pi equal to 1. On the platformboundaries, the normal loading and maximum moduluschange rapidly. This result comes from a convolution witha modified potential stress tensor given by formula (25).
Results of the dependence of the average normalcomponent of the loading vector, pn, on the porouspressure and on the parameter h0 (under the condition thatthe porous pressure is unit) is presented in Table 1.
h0 rigid contact, pn slip contact, pn0.80 -0.018 -0.0200.85 -0.031 -0.0390.90 -0.075 -0.1030.95 -0.342 -0.416
Table 1: Dependence of the average normal loading, pn,(as effective pressure, peff) on the h0 parameters, and onthe type of boundary contact, with the condition that thepore pressure is equal to 1. From the table, the effectivepressure is proportional to the pore pressure, as can beseen from the increasing negative values on both rightcolumns with respect to the left column.
The main difference, from the mechanical point of view,between the present method and the one by Sibiryakov andSibiryakov (2010), is the interaction between the platformsof the grain contacts, where in the axial symmetric case,there was only two platforms, no dependence on the ϕ
parameter, and the average normal loading was positivefor the case of large enough platforms (it corresponds toreinforcement of the granular medium). But, for the presentcase of six platforms it is proved that the reinforcement ofthe granular medium to be impossible.
The common fact is that, when the area of the contact islarge enough, the dependence of effective pressure (peff)on the porous pressure (ppor) is not significant. The smallerthe grain contact area, the stronger the dependence of theeffective pressure on the porous pressure, and on the typeof the boundary conditions (rigid or slip). In the case ofthe slip contact the influence of the porous pressure on theeffective pressure is larger.
The most probable areas for destruction by increasingthe porous pressure are for the small contact platforms.
The process of destruction will be irreversible, becausethe normal loading at the edge is maximum, and thebeginning of rupture means decreasing of the contact area.The mechanical feedback process is that by decreasingthe contact area causes the increasing of the normalcomponent of the loading vector on the edge of the contactplatform.
Conclusions
The new method applied was developed and numericallytested for the numerical solution of the linear elasticMBVPs. This method can be used to solve static andstationary oscillation problems.
The finite analogue for the dipole potential showed to bereliable and valid method to solve MBVPs.
The advantage of this method is the finiteness and thesmoothness of the integral kernels, that made it possibleto solve the elastic problem on surfaces, where the normalvector may have points of discontinuity.
The method showed not to depend on the accuracy ofthe numerical integration formula. Moreover, the methodmakes it possible to eliminate the use of integral equationsby replacing the integrals by finite summations.
The effective pressure (peff) should have the meaningof an average normal loading, peff = p, for all forms ofcontacts under the influence of pore pressure, instead ofa subtraction (peff = pcon− ppor). In the present conceptualcase, the effective pressure (peff) is proportional to the porepressure (ppor), it has opposite sign, but the proportionalitydepends substantially on the contact area. If the contactarea is sufficiently large, then for the rigid and for theslip contact type, the proportionality is small enough, butby reducing the contact area the proportionality becomeslarge enough, and the effective pressure increases.
References
Biondi, L. B., 2010, 3d Seismic Imaging: Society ofExploration Geophysicists, Tulsa, OK, USA.
Eskola, L., 1992, Geophysical Interpretation Using IntegralEquations: Springer, New York, USA.
Galperin, E. I., 1985, Vertical Seismic Profiling and ItsExploration Potential: D. Reidel Publishing Company,Boston.
Kupradze, V. D., 1963, The Potential Method in Elasticity:Physics and Mathematics Issue, Moscow.
Sibiriakov, E., Sibiryakov, B., Leite, L. W. B., and Vieira, W.W. S., 2016, On a new method for the solution of theelasto-dynamic: Submitted to SEG, Geophysics.
Sibiryakov, E. P., and Sibiryakov, B. P., 2010, The structureof pore space and disjoining pressure in granularmedium: Physical Mesomechanics (Special Issue), 13,40–43.
Acknowledgments
The authors would like to thank the sponsorship of ScienceWithout Borders of MEC/CAPES, the Project INCT-GP, andthe Project ANP-PRH-06. We extend our thanks also to theCNPQ for the scholarship.
Fifteenth International Congress of The Brazilian Geophysical Society