Embed Size (px)
Citation preview

CHAPTER 7
Polyhedral curvature
As I mentioned earlier, the differences between spherical/elliptic geometry, Eu-
clidean geometry, and hyperbolic geometry can be characterized in terms of curva-
ture. Having done this, we will have a much more general and complete collection
of geometries. To get you thinking, note that the Euclidean plane is flat, the sphere
is round, and the hyperbolic plane is wrinkly (see [Bonola, p 133]). Things at least
look that way through our Euclidean eyes.
As a preview, I can show you how well curvature unifies geometry, and believe
me, it unifies amazingly well. Recall that the angle sum of a triangle was different
in spherical, Euclidean, and hyperbolic geometry. For a triangle with angles α, β,
and γ and area A, we saw that in spherical geometry
(206) α + β + γ = π +A,
in Euclidean geometry
(207) α+ β + γ = π,
and in hyperbolic geometry
(208) α+ β + γ = π −A.
Eventually, we will define something called Gauss curvature, and it will turn out
that the Gauss curvature for the unit sphere is K = 1, for the Euclidean plane is
K = 0, and for the hyperbolic plane is K = −1. With this, we can combine these
three formulas into one with
(209) α+ β + γ = π +KA.
We’re obviously looking at something quite fantastic. In fact, this last formula is
starting to reveal something, that was not obvious before. The deviation of the angle
sum of a triangle from π is not so much a function of area, but of the amount of
curvature inside the triangle.
122

1. WHAT DID DESCARTES SEE? 123
The Gauss curvature can be thought of as a rate of curvature. It is a rate of
another kind of curvature, which I’ll call Cartesian curvature (I’m making up this
name), and this is what we’ll focus on first. As an example, the unit sphere has
Gauss curvature K = 1. As a rate, this can be interpreted as one unit of Cartesian
curvature per unit area. Since the unit sphere has area 4π, that’s how much Cartesian
curvature it has.
If we use C for Cartesian curvature, then the Gauss and Cartesian curvatures are
related by
(210) K =C
A,
or
(211) C = KA.
Our angle sum formula, could then be written
(212) α+ β + γ = π + C,
where C is the amount of Cartesian curvature inside the triangle.
1. What did Descartes see?
In general, I will use the word curvature to describe how something is not flat.
Figure 1. You can fold paper without stretching, crinkling, or tearing it.
A piece of paper is flat. It has a Euclidean geometry1. You can fold it (as in
Figure 1) without much trouble, but you really can’t smoothly bend it into the shape
of a sphere. Gauss curvature and Cartesian curvature (I haven’t defined either one)
both measure the inability to flatten a surface.
1That is, flat paper has the same geometry as the Euclidean plane

1. WHAT DID DESCARTES SEE? 124
Figure 2. Cut this out, and tape it together to make a cube.

1. WHAT DID DESCARTES SEE? 125
You can take a pair of scissors and some tape, cut out Figure 2, and tape it
together to build a cube. After you start taping, it is no longer possible to flatten it
back out without tearing or pulling the tape off. A cube, therefore, must have some
curvature, and it’s not in the edges (the folds). Therefore, it must all be in the corners.
Descartes found a simple, and amazingly useful, way of measuring this curvature. At
each corner of the cube, the corners of three square disks come together. Each angle
of the square measures π2
radians, and the three angles around each vertex sum to 3π2
radians. Now, the corners of a cube will not lay flat, because their geometry is not
Euclidean. In the Euclidean plane, where four squares coming together would lay
flat, there is always 2π radians around every point. The corners of a cube don’t lay
flat, because they are missing π2
radians. Descartes, therefore, called this an angle
defect of π2
radians. The term angle defect, I think, is the common term used today,
but actually, Descartes called it the angulum externum, which might be translated
from Latin as the external angle (I’m thinking that he didn’t write in English very
often) [Federico, p 44].
Let’s do some math. We have a cube, and we know the angle defect at each
corner. It’s π2. There are eight corners, so the total of the angle defects is
(213) 8 · π2
= 4π.
We’ve seen this number before. It’s the area of the unit sphere, and more importantly,
it’s the total amount of Cartesian curvature on the sphere.
Let’s do that again for something else. A regular tetrahedron (just the surface
as always) is also called a triangular-based pyramid. It is made up of four equilateral
triangles. How many vertices does it have? 4. What is the angle defect at each
vertex? 2π − 3 · π3
= π. What is the total angle defect? 4 · π = 4π Is a pattern
developing?
Conjecture 3. For any polyhedron that is a topological sphere, the total angle
defect will always be 4π.
If this conjecture is true, then it seems likely that the total Cartesian curvature
we talked about before is the same as the total angle defect.

2. PROOF OF CONJECTURE: TOTAL ANGLE DEFECT FOR A SPHERE IS 4π 126
2. Proof of Conjecture: Total angle defect for a sphere is 4π
Suppose we have a polyhedron that is a topological sphere. In the context of angle
defects, we will always assume that the faces are flat. Furthermore, we will assume
that all the faces are triangular disks.
Since the faces are all flat triangular disks, we know that the angle sum is π
radians. Since this is a sphere, we also know that χ = f − e+ v = 2.
The number of faces is f . If we add up all the angles from all the faces, then we
get πf .
The number of corners is the same as the number of vertices v. If every vertex
were flat, there would be angles totalling 2π surrounding each vertex, and all these
angles would add up to 2πv. If there is an angle defect at any corner, then the angles
that are there subtracted from 2π would be the angle defect. We can’t compute these
individually, because we don’t have enough information for that. We can, however,
compute all the angle defects at once. All the 2π’s minus all the angles of all the
faces is the total angle defect. That is, the total angle defect is
(214) total angle defect = 2πv − πf = (2v − f)π.
This is a sphere, so every edge must be shared by exactly two faces. Since every
face has three edges, and each edge is used twice, we know that
(215) e =3f
2.
Now, using the fact that χ = 2, we know that
(216) 2 = f − e+ v,
and so substituting equation (215) into this, we get
(217) 2 = f − 3f
2+ v = v − f
2.
Now, multiply this by 2. We get
(218) 4 = 2v − f.
Substitute this into equation (214) to get
(219) total angle defect = (2v − f)π = 4π.
How could that work so nicely?

3. WHAT DESCARTES WROTE 127
Now, we’ve got the theorem for a triangulation. For a decomposition into poly-
gons, we simply add diagonals to get a triangulation. The diagonals simply subdivide
the existing angles, so the sum of the angles stays the same, and we get the same
result. This completes the proof, so we now have the following.
Descartes’ Theorem. For a polyhedron that is a topological sphere, the total
angle defect is always 4π radians.
3. What Descartes wrote
The stuff we typically see in mathematics has been rewritten and redefined a
number of times, and we rarely get to see where they came from. Here’s a look.
Federico says that Descartes wrote the original manuscript sometime in the early
17th century. After he died, his papers were collected, accidentally dropped in a river,
and hung to dry. They were kept for awhile, and Leibniz apparently got a chance to
see them, and he copied some stuff out of it. Leibniz’ copy is shown in the book. It
looks mostly like a bunch of scribbling. The first sentence is recognizable [Federico,
p 11], “Progymnasmata de Solidorum Elementis excerpta ex Manuscripto Cartesii.”
The translation given by Federico is [Federico, p 43], “Preliminary Exercises on the
Elements of Solids Taken from a Manuscript of Descartes.” In the middle of the
fourth line, begins the statement of Descartes’ theorem [Federico, p 44]:
Sicut in figura plana omnes anguli externi, simul sumti, aequales sunt
quatuor rectis: ita in corpore solido omnes anguli solidi externi, simul
sumti, aequales sunt octo solidis rectis. Per angulum externum intel-
ligo curvaturam seu inclinationem planorum ad invicem, quam metiri
oportet ex angulis planis angulum solidum comprehendentibus. Nam
illa pars qua aggregatum ex omnibus angulis planis unum angulum
solidum facientibus, minus est quam quatuor anguli recti planum fa-
cientes, designat angulum externum solidum.
I can’t read Latin (I believe that’s what this is), but I can match up a lot of the words
from the translation given by Federico [Federico, p 44].
As in a plane figure all the exterior angles, taken together, equal four
right angles, so in a solid body all the exterior solid angles, taken to-
gether, equal eight solid right angles. By exterior angle I mean the

4. ANGLE SUMS OF TRIANGLES ON CONES 128
mutual bending or inclination of the planes, which is to be measured
with the help of the plane angles which comprise the solid angle. For
the part by which the sum of all the plane angles forming a solid angle
is less than the four right angles which form a plane, designates the
exterior solid angle.
Our very important number, 4π, is there in Liebniz’ handwriting, “aequales sunt octo
solidus rectis.” That’s “equal eight solid right angles”
4. Angle sums of triangles on cones
I plan on coming back to extensions of Descartes’ theorem, but first, I want to
talk about how it sheds light on the geometries of Gauss/Bolyai/Lobachevski, Euclid,
and Riemann (“The Big Three geometries”).
We could say that the point of Hilbert’s axiom system is to precisely characterize
the properties of a straight line. The existence of non-Euclidean geometries illustrate
the fact that the concept of a straight line isn’t as simple as we might have thought.
The differences between the Euclidean and non-Euclidean geometries lie well outside
of our practical experiences. One property that lines in all these geometries have is
that they minimize distance. In particular, given two nearby points, the curve joining
the points with the shortest possible length is a line segment. Again, this is true in
all of the Big Three.
On a curved surface (and flat ones as well) the term geodesic (“gee uh DEZ
ick”) is used for curves that minimize distance. The lines of spherical, Euclidean,
and hyperbolic geometry are all geodesics, and we’ll even think of the geodesics of a
surface as the lines for the geometry belonging to that surface. In my mind, there is
no mathematical distinction between the words line and geodesic.
Take out a piece of paper, and mark two points A and B on it, as in Figure 3.
With a ruler, draw a straight line through the two points. We know the segment
between A and B is the shortest curve joining A and B, because the geometry of
paper is Euclidean, and the shortest distance occurs along a straight line. Now roll
the paper into a cylinder as in Figure 3. Of all the curves between A and B that
lie on the cylinder, the shortest distance must be along the straight line you drew,
which is now curved with the surface, because we haven’t changed any of the small
distances measured along the paper.

4. ANGLE SUMS OF TRIANGLES ON CONES 129
A
B
A
B
Figure 3. We can roll up a piece of paper to make a cylinder.
The line on the flat piece of paper becomes a curve on the cylinder that minimizes
distances, so the line is a geodesic. All geodesics on the cylinder can be determined
this way. Most of the geodesics on the cylinder turn out to be helixes (I guess you’re
supposed to say “helices”). The others can be seen as degenerate helixes. Vertical
lines are geodesics, and horizontal circles are also geodesics.
Since the geodesics are the lines for the geometry of the cylinder, the things we’ll
call triangles will have three sides that are segments from geodesics (i.e., geodesic
segments). For a relatively small triangle, we know that when flattened, the angle
sum is 180◦ or π radians. The measures of the angles don’t change when we roll the
paper into a cylinder, so the angle sum will still be 180◦.
The local geometry of the cylinder is Euclidean. The global geometry is different,
of course. We have lines that are circles, for example. We also have that pairs of
points can have more than one line through them. Can you see any examples?
This is an example of taking one geometry, and creating a new one with different
global structure by changing its topology. Since it is easy for us to work in Euclidean
geometry, I think it’s important that we can make a rich variety of geometries out of
paper (at least theoretically).
Basic Principle 5. For any surface we can make out of paper, it is easy to find
geodesics.

5. THE CARTESIAN CURVATURE OF CONES 130
5. The Cartesian curvature of cones
Most of what I’ve come to understand about geometry has come from playing
with cones. They have a Euclidean geometry almost everywhere, so they are easy to
work with, but there is curvature in the vertex, so we can see how curvature affects
the behavior of geodesics (i.e., you can see how the geometry works). Because of this,
I believe that an introduction to geometry should start with cones.
Figure 4. Plans for a cone and two geodesics on the cone.
5.1. Exercises.
–1– We can make a cone by removing a wedge from a piece of paper, and taping
the edges together. Cut out Figure 4, and tape the edges together to make
a cone. (There are extra copies of some of these figures at the end of this
print out.)
–2– The piece of paper you started with was flat, so there were 2π radians around
the vertex. How much did you remove? What was the angle defect?
–3– I’ve drawn a pair of geodesics on your cone. Do these geodesics behave more
like the lines of the sphere, the Euclidean plane, or the hyperbolic plane?

5. THE CARTESIAN CURVATURE OF CONES 131
We saw earlier that it looked like angle defects and Cartesian curvature should be
the same. Let’s go ahead and make that explicit.
Definition 1. If we remove a θ-radian wedge to form a cone, then the Cartesian
curvature at the vertex of the cone is defined to be θ. At non-vertex points, the
Cartesian curvature is zero.
On the sphere, lines seem to turn towards each other. For example, there were
2-gons (bounding lunes) on the sphere. If you start at one angle of a 2-gon and move
away, the two sides move away from each other. They eventually start getting closer
together, however, and meet again at the other angle. This could be described as the
lines turning towards each other, one to the left and the other to the right. Consider
one line on the sphere (i.e., a great circle). Does it really make sense to say it turns
to the left or right?
This cone provides another interpretation of what happens on the sphere. The
lines don’t turn towards each other so much as the space between them gets smaller.
On the cone, we actually went in and removed a chunk of the space (the wedge).
On the hyperbolic plane, lines seem to move away from each other, and this
made it much easier for lines to be parallel. We can cause geodesic behavior like this
on a cone by adding a wedge.
Figure 5. A cone with an added wedge. Cut along the wavy lines to
separate the two pieces. Cut along the dotted lines. Tape the extra
wedge along the dotted lines.
Cut out Figure 5, including the extra wedge. Cut along the slit and tape the
wedge in. You should now have a saddle-shaped cone with an extra 45◦ around the
5. THE CARTESIAN CURVATURE OF CONES 132
vertex. If removing a wedge gives you a positive angle deficit, then it makes sense to
think of adding a wedge as creating a negative angle defect.
Definition 2. If we add a θ-radian wedge to form a (saddle-shaped) cone, the
Cartesian curvature is defined to be −θ.
Basic Principle 6. We will associate positive Cartesian curvatures with elliptic
geometries (e.g., spherical geometry) and negative Cartesian curvatures with hyper-
bolic geometry.
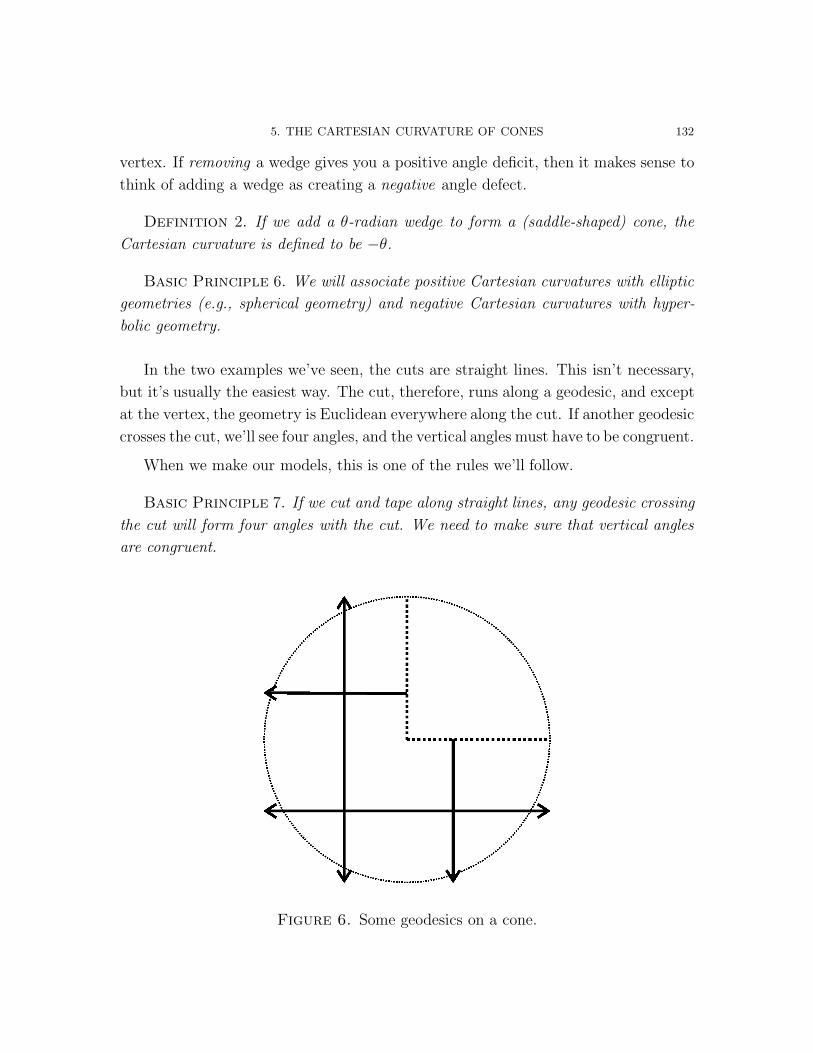
In the two examples we’ve seen, the cuts are straight lines. This isn’t necessary,
but it’s usually the easiest way. The cut, therefore, runs along a geodesic, and except
at the vertex, the geometry is Euclidean everywhere along the cut. If another geodesic
crosses the cut, we’ll see four angles, and the vertical angles must have to be congruent.
When we make our models, this is one of the rules we’ll follow.
Basic Principle 7. If we cut and tape along straight lines, any geodesic crossing
the cut will form four angles with the cut. We need to make sure that vertical angles
are congruent.
Figure 6. Some geodesics on a cone.

6. ANGLE SUMS OF TRIANGLES WITH POSITIVE CURVATURE 133
In Figure 6, note that I have four lines meeting at right angles. Two of the lines hit
the cut at right angles, and they will come together when you cut and tape. These will
come together to form a single geodesic. We have, therefore, three geodesics coming
together to form a triangle with three right angles. The angle sum is 3π2
, which isπ2
more than what we would expect in the Euclidean plane. We might suspect that
there must be Cartesian curvature totalling π2
inside the triangle, and we would, of
course, be correct.
θ
ϕ
ϕα
β
γ
Figure 7. This is a triangle with positive Cartesian curvature θ inside.
6. Angle sums of triangles with positive curvature
We’ve seen that the presence of curvature in the interior of a triangle affects the
triangle’s angle sum. Furthermore, this happens in a nice way. In this section, I’m
going to have you derive formulas for the angle sum of a triangle on a cone.
In Figure 7, I’ve drawn a fairly typical triangle around the vertex. I want to relate
the angle sum of the triangle and the Cartesian curvature θ. Let’s just go straight to
the computations. In Figure 8, I’ve subdivided the figure into triangles.

6. ANGLE SUMS OF TRIANGLES WITH POSITIVE CURVATURE 134
θ
ϕ
ϕα1α2
β1 β2
γ1
γ2
123
4
567
Figure 8. In this subdivision, all the triangles are Euclidean.
6.1. Exercises.
–1– All of the triangles that look like triangles in Figure 8 are Euclidean triangles.
In radians, what is the following sum?
(220) α1 + α2 + β1 + β2 + γ1 + γ2 + ϕ+ ∠1 + ∠2 + ∠3 + ∠4 + ∠5 + ∠6 + ∠7 + θ.
–2– What is ∠4 + ∠5 + ∠6 + ∠7 + θ?
–3– Therefore, what is α1 + α2 + β1 + β2 + γ1 + γ2 + ϕ+ ∠1 + ∠2 + ∠3?
–4– What is ϕ+ ∠3?
–5– What is ∠1 + ∠2 in terms of θ?
–6– You should now have enough information to find α + β + γ in terms of θ.
What do you get?
You have proven the following theorem.
Theorem 14. For a triangle around the vertex of a cone with positive Cartesian
curvature θ, the angle sum is given by the formula α + β + γ = π + θ.

8. ANGLE SUM OF A TRIANGLE 135
θϕ
ϕψ
ψ
α
β
γ1
2
3
456
Figure 9. The figure corresponding to Figure 8
7. Angle sum of a triangle with negative curvature
The picture looks a little different with negative Cartesian curvature, but we get
a similar result.
7.1. Exercises.
–1– Look at Figure 9 Following a strategy similar to the one used in the previous
section, you should be able to find the angle sum α + β + γ in terms of θ.
Do the math.
Theorem 15. For a triangle around the vertex of a cone with negative Cartesian
curvature −θ, the angle sum of the triangle is α + β + γ = π − θ.
8. Angle Sum of a Triangle
The theorems of the last two sections say the same thing. We therefore have the
following.

8. ANGLE SUM OF A TRIANGLE 136
Theorem 16. For a triangle around the vertex of a cone with Cartesian curvature
θ, the angle sum of the triangle is α + β + γ = π + θ. The number θ may be positive
or negative.
8.1. Exercises.
–1– Is this last theorem true for a Cartesian curvature of θ = 0? What kind of
surface is this?

9. THE ANGLE SUM OF A POLYGON 137
Figure 10. Copy of Figure 4.
Figure 11. Copy of Figure 5. Cut along the wavy lines. Cut along
the dotted lines. Tape the extra wedge along the dotted lines.
9. The angle sum of a polygon
The principle theme lately is that the amount of curvature inside a triangle de-
termines that triangle’s angle sum. This holds equally for the total amount of Gauss
curvature (which we haven’t defined), Cartesian curvature, and angle defects. In fact,
I claim that these are all the same thing. Another theme is that the angle sum of

9. THE ANGLE SUM OF A POLYGON 138
Figure 12. Copy of Figure 6.
a triangle is intimately tied to the kind of geometry we are considering (hyperbolic,
Euclidean, or elliptic).
Before we continue on, I would like to talk more about the angle sum of a triangle.
There is no doubt that a triangle’s angle sum captures something fundamental about
geometry, it’s not quite the right thing, however. Let me direct your attention back
to Descartes’ statement of Descartes’ theorem. Descartes said, [Federico, p 44]
As in a plane figure all the exterior angles, taken together, equal four
right angles, so in a solid body all the exterior solid angles, taken to-
gether, equal eight solid right angles.
“Eight solid right angles” is 4π steradians in modern terminology. A steradian is a
unit of measure for solid angles such as the corner of a cube or the vertex of a cone.
I’ll talk about them later. The second part of this sentence is Descartes’ theorem.
Descartes also refers to another theorem,
Theorem 17. In a plane figure, all the exterior angles, taken together, equal four
right angles (i.e., 2π radians).
This is a lower-dimensional version of Descartes’ theorem, and it suggests a better
object of focus than the angle sum of a triangle. That’s what we’ll do now.

9. THE ANGLE SUM OF A POLYGON 139
Bad!!
Figure 13. This pentagonal disk is not convex. There is at least one
pair of points, where the segment joining them lies partly outside of
the disk.
In Euclidean geometry, the angle sum of a triangle is π radians. A polygonal disk
is convex, if any two points in the disk can be connected by a segment that stays
inside the disk. The pentagonal disk shown in Figure 13 is not convex, and a pair of
points that cannot be connected by a segment inside the pentagon is shown.
Figure 14. A pentagonal disk subdivided into three triangular disks.
It is relatively easy to find the angle sum of a convex polygon. For example, the
convex pentagon shown in Figure 14 has been subdivided into three triangles. Now,
the sum of the nine angles of the three triangles must be exactly the same as the sum
of the five angles of the pentagon. Right? The angle sum of the pentagon, therefore,
must be 3π. We can play this same game with any convex polygon.
9.1. Exercises.
–1– What is the angle sum of a convex n-gon?
–2– What is the angle sum of the non-convex pentagon in Figure 13?

10. TRIANGULATING POLYGONAL DISKS 140
–3– Is convexity a topological invariant? That is, does a topological deformation
always preserve convexity?
You can draw in diagonals for the pentagon in Figure 13 to subdivide it into
three triangles, but it is far from clear that you can do this with just any non-convex
polygon. I believe that it’s possible in general, but I’m not absolutely sure. If we
define a diagonal to be a segment from one vertex to another non-adjacent vertex
that lies entirely within the polygonal disk, could you prove that any polygonal disk
has a diagonal? Again, I think this is true, but I can’t think of a way to prove it. I
also don’t care about it enough to look it up.
What I do care about, however, is finding a formula for the angle sum of any
polygonal disk (convex or not), and I also want you to wrestle with triangulations at
least once. Concepts in both geometry and topology have seemed to me more and
more to distill down to questions about triangulations.
10. Triangulating polygonal disks
As I’ve just said, I believe that you can always triangulate a polygonal disk with
diagonals. If you could prove that, that would be great. The argument we’re going
to pursue, however, is sufficient for our needs, and I think the argument itself is more
general.
Theorem 18. Polygonal disks can always be triangulated. In particular, we can
subdivide any polygonal disk into a finite number of triangular disks with straight
edges.
We will come up with a scheme that will produce a triangulation. This triangu-
lation will not be the most efficient possible, but it will make the proof easy. The
basic idea is contained in Figures 15 and 16. Given a polygonal disk, we lay it out in
the xy-plane, and impose a system of grid lines. This is shown in Figure 15. At each
vertex, we add a horizontal and a vertical grid line (unless they’re already there) to
ensure that each vertex is at an intersection of grid lines. This is shown in Figure
16. In Figure 16, the polygonal disk has been subdivided into smaller polygonal disks
by the new grid lines. Some of these disks are rectangular. They’re all triangles or
convex quadrilaterals. For each quadrialateral, we only have to add a diagonal to
subdivide it into a triangle.

10. TRIANGULATING POLYGONAL DISKS 141
Figure 15. A grid system is imposed on the polygonal disk.
Figure 16. Additional grid lines are added to ensure that vertices of
the polygonal disk correspond to intersections of grid lines.
A
B
C
Figure 17. Dotted lines indicate the shortest distance between the
heavy line segments.
I will want to use the notion of the shortest distance between two line segments.
In Figure 17, we have segments A, B, and C. The shortest distance between segments
A and B occurs between the upper endpoints on each. The shortest distance between

10. TRIANGULATING POLYGONAL DISKS 142
segments B and C occurs between an interior point of B and an endpoint of C. Note
that except for parallel line segments, the shortest distance between two segments
cannot be between two interior points.
OK. Let’s do the proof in general.
Suppose we have a polygonal disk lying in the xy-plane.
The shortest distance between adjacent edges is zero.
The shortest distance between non-adjacent edges must be strictly positive.
Suppose there are n edges (and therefore n vertices). Pick an edge. There are
n−3 edges that are not adjacent to this edge, so there are n−3 pairs of non-adjacent
edges including this one. We can do this n times, but we would be counting every
pair twice, so there are
(221)n · (n − 3)
2
possible pairs of non-adjacent edges total. The exact number isn’t important, but
there surely are only finitely many pairs. Therefore, we have a finite set of positive
minimum distances between pairs of non-adjacent edges. We can say, therefore, that
there is a pair of non-adjacent edges a positive distance apart, and no other pair is
closer together.
Let’s say that the shortest distance between the closest pair of non-adjacent edges
is ε, and ε is positive.
Is it possible for an ε by ε square to contain parts of two non-adjacent edges?
Well, yes. The distance between opposite corners is√
2ε > ε. Dividing by√
2 makes
the square small enough.
Therefore, if we impose a system of grid lines with spacings less than ε√2, then
we know for sure that each grid square will contain a part of one edge, parts of two
adjacent edges, or no part of any edge. If we add horizontal and vertical grid lines
through each of the vertices, then we will have grid squares and grid rectangles, but
we will know that vertices of the polygonal disk are only at the corners.
OK. We now have the polygonal disk subdivided into small polygonal disks. If
we can triangulate each of the small polygonal disks, then we have a triangulation of
the original polygonal disk.

11. THE ANGLE SUM OF AN N-GON 143
All of the grid rectangles that lie completely outside of the polygonal disk are not
needed. We don’t care about them. Some of the grid rectangles lie completely inside
the polygonal disk. We can triangulate these rectangles with a diagonal line.
All of the other rectangles have an edge or two running through them. We need
to address each possible case.
10.1. Exercises.
–1– If a grid rectangle has a single edge running through it, what shape can the
resulting small polygonal disk take? (I think there are six cases and three
kinds of shape (i.e., triangular, quadrangular, etc.)) Draw a picture of each
case.
–2– If a grid rectangle has two edges running through it, it must have a vertex at
one of its corners. What shapes can we get for the small polygonal disks this
way? Draw the cases. (I think there are six cases here, as well. It’s possible
that two small disks are generated.)
This completes the proof of the theorem. Topologists speak of something called the
Hauptvermutung. This is a German word, and many German words are compound
words. Haupt means something like primary and vermutung can mean supposition.
The Hauptvermutung, therefore, is the big conjecture asking if “everything” has a
triangulation. In a few cases, it isn’t true, but it seems to be true most of the time.
You’ve just proven the Hauptvermutung for flat polygonal disks.
11. The angle sum of an n-gon
You showed earlier that the angle sum of a convex n-gon is π(n−2). In one fairly
general case, you saw that a non-convex pentagon satisfied this same formula. This
alone should give us great confidence that this formula holds for all n-gons, so let’s
prove it.
Suppose we have an n-gonal disk and a triangulation of it. This might look
something like Figure 18. Since this is a disk, we know that the Euler characteristic
is χ = f − e+ v = 1. It will be convenient to separate the vertices and edges in the
triangulation into different types. We are most interested in the original vertices of
the n-gon. I’m going to call these, the vertices like A or D, the corner vertices. There

11. THE ANGLE SUM OF AN N-GON 144
A
B
C
D
Figure 18. This is a triangulation of a polygonal disk.
are also new vertices along the outer edges, like C, which I’ll call edge vertices. The
new vertices inside the n-gonal disk, like B, will be called interior vertices. Let vi be
the number of interior vertices, ve the number of edge vertices, and vc the number of
corner vertices. We have that
(222) v = vi + vb + vc.
We actually know what vc is, since these are the corners of our n-gon. We know that
vc = n.
We’ll also differentiate between two types of edges. The edges along the boundary
of the n-gonal disk will be called boundary edges, and the edges lying in the interior
will be called interior edges. There are eb boundary edges and ei interior edges. We
have that
(223) e = ei + eb.
Along the boundary of the n-gonal disk, there are ve + vc = ve +n vertices and eb
edges, and
(224) ve + n = eb,
because the boundary is just a simple closed curve.
Since the Euler characteristic is χ = f − e+ v = 1 in terms of f , vi, vb, vc, ei, and
eb, we have
(225) 1 = χ = f − (ei + eb) + (vc + ve + vi) = f − (ei + eb) + (n + ve + vi).

11. THE ANGLE SUM OF AN N-GON 145
We’re after the angle sum of the n-gon. At each of the corner vertices, like A and
D, the interior angles are subdivided into smaller angles. In Figure 18, there are three
at A and five at D. If we add up the smaller angles at each of the corner vertices,
then we will have the angle sum of the n-gon. This is the ultimate goal. Let’s call
the angle sum Σ.
The sum of all the angles of all the triangles in the triangulation is πf .
We have angles surrounding each of the interior vertices, like B in Figure 18,
totaling 2π. Each of the new vertices on the edges have angles around them, but not
all the way around. The new vertices on the edges are interior to the edge, so these
vertices only have π radians around them. We can now subtract all of the new angles
from the all the angles in the triangulation to get Σ.
(226) Σ = πf − 2πvi − πve.
One last piece of information will make this into an algebra problem. We have f
triangles and each of these triangles has three edges. We must account for 3f edges.
Some of these edges are used twice and some only once. Since each of the interior
edges is shared by two triangles, they are counted twice in 3f . The boundary edges
are only used once, so
(227) 2ei + eb = 3f.
Now, it’s just a matter of mashing these equations together. Getting rid of the
v’s in equation (226) works. Note that there is a ve + n in equation . According to
equation (224), this is equal to eb, and equation (11) becomes
(228) 1 = f − ei − eb + eb + vi.
Solving this for vi gives
(229) vi = 1 − f + ei.

12. EXTERIOR ANGLE SUMS 146
Now, we can substitute this and equation (224) into (226) to get
Σ = πf − 2πvi − πve
= π ( f − 2vi − ve )
= π ( f − 2(1 − f + ei) − (eb − n) )
= π ( 3f − 2ei − eb + n − 2 )
= π ( n− 2 ) ,
(230)
the last step coming from equation (227).
This establishes the following theorem.
Theorem 19. (Euclidean geometry) The angle sum of an n-gon is π(n− 2). The
n-gon need not be convex, but it must bound a disk.
Some assumptions that I haven’t stated explicitly are as follows. An n-gon is a
simple closed curve that consists of n straight line segments lying in a (Euclidean)
plane. It is a topological fact that any simple closed curve lying in the plane will
bound a disk. In particular, there are closed polygonal paths that intersects them-
selves, like a figure-eight curve. We will not call such a thing an n-gon or a polygon.
12. Exterior angle sums
Earlier, I mentioned Descartes’ statement, “As in a plane figure all the exterior
angles, taken together, equal four right angles, . . .” With Theorem 19, it is easy to
prove this fact. First, let’s talk about exterior angles.
For cones, the angle defect (or Cartesian curvature) is 2π − θ, where θ is the
radian measure of the wedge removed. Descartes called this the anguli externi or
external angle. The external angle is a measure of how much the cone is not flat.
If we go down one dimension, a vertex of a polygon is a place where the polygon is
not straight. Right? The angles are bent, and the edges are straight. If an angle
of a polygon measured 2π3
radians, then we would know that it was not a straight
angle, because a straight angle measures π radians. In this case, we would say that
the angle defect is π3
radians, because that’s how far the angle is from being straight.
Descartes called this the external angle.

12. EXTERIOR ANGLE SUMS 147
Definition 3. If an angle of a polygon measures θ radians, then the external
angle, or the angle defect, is π − θ. Note that if θ is greater than π, then the angle
defect is negative.
We have a nice formula for the angle sum of an n-gon. The exterior angle sum has
even a nicer formula giving some indication that it is a more fundamental quantity.
These last exercises will establish this fact.
12.1. Exercises.
–1– You proved in the last section that the angle sum of an n-gon is π(n − 2).
We would find the angle defect of each of the n angles by subtracting the
measure of the angle from π. What is the sum of the angle defects? (Hint:
You could grind this out. The angles measure θ1, θ2, . . ., θn. The angle sum
is∑θi and the angle defect sum is
∑(π − θi).)
–2– State a good assignment ending theorem.
In this section, we showed that in Euclidean geometry the angle sum of any
polygon is π(n − 2), where n is the number of sides. Even better, you showed that
the external angle sum of any polygon is 2π no matter how many sides it has. The
internal and external angle sums of polygons are generalizations of the angle sum of
a triangle, and we’ve seen how the angle sum of a triangle is different in different
geometries. In particular, if the Cartesian curvature inside of a triangle is C, then
(231) α+ β + γ = π + C.
The external angle sum of this triangle is
(232) (π − α) + (π − β) + (π − γ) = 3π − (α + β + γ) = 3π − (π + C) = 2π − C.
As we’ll see, the internal and external angle sums of polygons are nice in other geome-
tries as well, and they look very much like equations (231) and (232). Once we have
this nailed down, we’ll be able to understand the behavior of geodesics on polyhedral
surfaces pretty well.

13. ANGLE SUMS AROUND THE VERTEX OF A CONE 148
θ
1a
2a2b
3a3b
4a
4b5a 5b
6a6b7a7b
8b8a1b
Figure 19. An octagon around the vertex of a cone with C = θ.
13. Angle Sums Around the Vertex of a Cone
In Figure 19, there is an octagon around the vertex of a cone with angle defect
θ. There is an extra copy of this figure at the end of this chapter. You can cut this
out and tape the dotted edges together. The Cartesian curvature inside the octagon
is C = θ. The angle sum of the octagon is
(233) ∠1a+ ∠1b+ ∠2a+ ∠2b+ · · · + ∠7a+ ∠7b + ∠8a+ ∠8b.
Figure 19 shows a triangulation of the octagonal disk on the cone. There are eight
triangles in this triangulation, therefore, all the angles in the figure sum up to 8π.
Eight of these angles are at the vertex of the cone. These must add up to 2π − θ,
where θ is the measure of the wedge that is removed to make the cone. The angle
sum of the octagon, therefore, must be
(234) Σ = 8π − (2π − θ) = 6π + θ.
Each of the external angles is π minus the internal angle, so the external angle sum
must be
(235) 8π − Σ = 2π + θ.
The external angle sum of an octagon in the Euclidean plane is 2π, and on this cone,
we get 2π + θ.

14. INTERIOR AND EXTERIOR ANGLE SUMS OF POLYGONS 149
13.1. Exercises.
–1– Consider a random hexagon around the vertex of this same cone (angle defect
of θ). Find the exterior angle sum for this hexagon.
–2– Make a conjecture about the exterior angle sum of a polygon around the
vertex of this cone.
14. Interior and exterior angle sums of polygons
Instead of working on cones, we can just as easily prove this in some generality.
Let’s do that. The theorems are as follows.
Theorem 20. For a polygon with total Cartesian curvature C inside, the interior
angle sum is π(n−2)+C, where n is the number of sides, and the exterior angle sum
is 2π − C.
C C C
B B
A
D
E
F F
Figure 20. A pentagon with four points of non-zero Cartesian curva-
ture inside.
Look at Figure 20. There is an extra copy at the end of this chapter.You can cut
this out, if you want, and tape the dotted edges with the same labels together to see
what this looks like. For example, the two segments AB should be taped together.
The points A, B, D, and E are interior points of the pentagon, and they have non-
zero angle defects. At B, the angle defect, and Cartesian curvature, is negative, but
that doesn’t really affect the computations. Let θA, θB, θD, and θE be the angle
defects at these interior points.

14. INTERIOR AND EXTERIOR ANGLE SUMS OF POLYGONS 150
14.1. Exercises.
–1– Since both segments AB are taped together, there is really only one edge
there. The same goes for BC, CD, and EF . Compute the Euler character-
istic for this triangulation.
–2– Is this non-flat pentagonal thing a disk? Does that agree with your answer
to the previous problem?
–3– Using f , ei, eb, vi, ve, and vc for the number of faces, interior edges, boundary
edges, etc., what are the values of each of these for the triangulation of Figure
20?
–4– I’m not giving you the specific angle measurements, just things like θA. The
angles around A must sum up to 2π − θA. Similarly for the angles around
B, D, and E. What do these four quantities add up to? That is, what is the
sum of all the angles around the vertices A, B, D, and E?
–5– The sum of all the angles of all the triangles is 14π, since f = 14. The
interior angle sum is part of this. The angles in the provious problem are
also. The rest are the angles around the edge vertices. Let Σ be the interior
angle sum of this pentagon. Compute Σ in terms of θA, θB, θD, and θE.
–6– What is the exterior angle sum of this pentagon?
I’ll do the general proof. It’s very similar to the argument in the last assignment.
The main difference is that we have an angle defect at each interior vertex to keep
track of.
Here’s the proof. Suppose we have a triangulation of an n-gon, as in Figure 20.
Actually, we’re interested in the n-gonal disk formed after the dotted edges are taped
together. There are ei interior vertices, let’s say that ei = m. At each of these interior
vertices, we may, or may not, have non-zero angle defects. Let’s say that the angle
defects are θ1, θ2, . . . , θm. Some of these angle defects may be negative or zero. The
sum of the angles around each interior vertex would be 2π, if this disk were flat, but
here these angles add up to 2π − θj.
Around each edge vertex, the angles add up to π, since these are straight angles.
The rest of the angles of the triangulation are at the corner vertices, so all together,
these add up to the interior angle sum of the n-gon. Let’s call the angle sum Σ. Since
all the angles of all the triangles in the triangulation add up to πf (f is the number
of faces), we need to subtract off the angles around the interior and edge vertices to

14. INTERIOR AND EXTERIOR ANGLE SUMS OF POLYGONS 151
get Σ. This gives us
Σ = πf − [(2π − θ1) + (2π − θ2) + · · · + (2π − θm)]− πve
= πf − 2πm+ (θ1 + · · · + θm) − πve.(236)
The total amount of Cartesian curvature (the sum of the angle defects) inside the
n-gon is C = θ1 + · · · + θm, and ei = m. We can rewrite this last equation as
(237) Σ −C = πf − 2πvi − πve.
What we have here is a disk, even though it’s not flat. The Euler characteristic must
be χ = 1. This tells us that
(238) f − ei − eb + vi + ve + n = 1.
Around the boundary of the n-gon, the number of edges and vertices must be the
same. Therefore
(239) ve + n = eb.
Finally, each face contributes three edges, but this counts the interior edges twice.
Therefore,
(240) 3f = 2ei + eb.
OK. Equations (237), (238), (239), and (240) look exactly like equations (226), (11),
(224), and (227), except we have Σ − C in (237), and we had Σ before. Exactly the
same computations, therefore, will lead you to the equation
(241) Σ −C = π(n− 2).
To compute the exterior angle sum, we subtract each of the n interior angles from π.
This means
(242) πn− Σ = πn−C − π(n− 2) = 2π − C.
This proves the theorem.
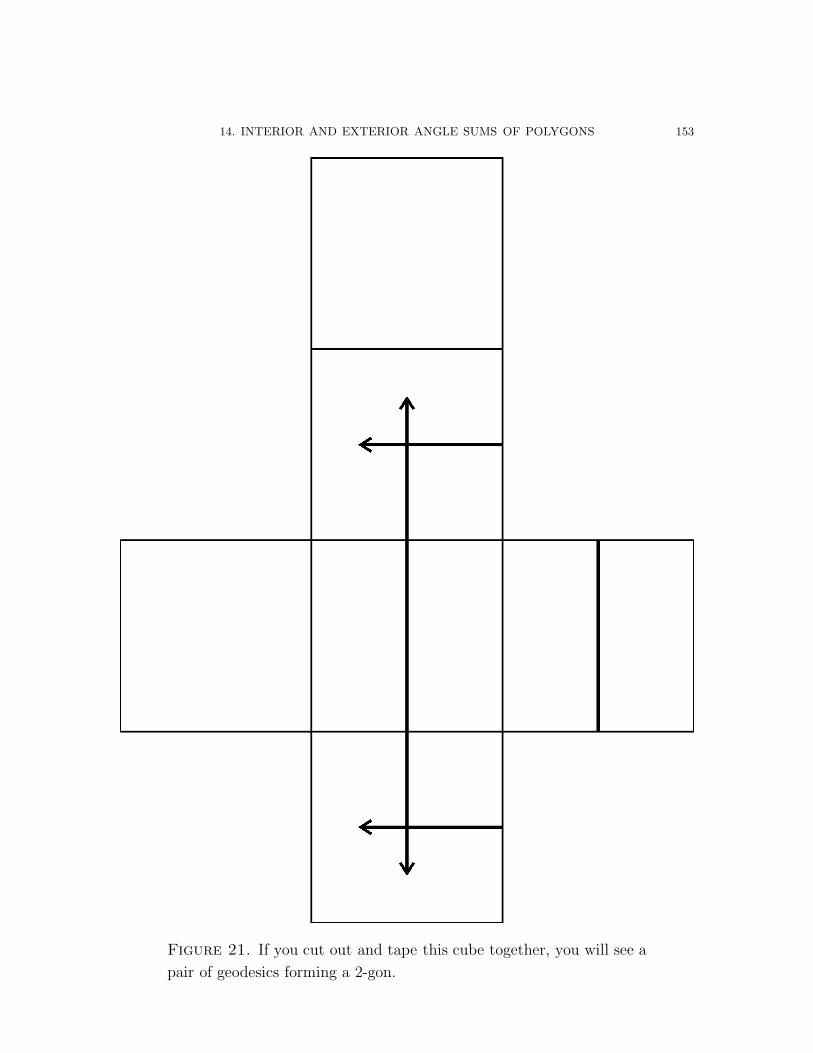
In Euclidean geometry, a 2-gon should have an interior angle sum of 0. On a
polydral surface, if a 2-gon contains Cartesian curvature totalling C, then the angle
sum should be C according to Theorem 20. On the following pages there are figures
(Figures 21 and 22) that can be cut out showing two 2-gons on the cube. Both
contain two vertices, which each have an angle deficit of π2
for a total of C = π, so

14. INTERIOR AND EXTERIOR ANGLE SUMS OF POLYGONS 152
their angle sums should be π. The interior angles on both 2-gons are right angles, so
this is indeed the case.
14.2. Exercises.
–1– On the surface of a cube, the angle defects at each vertex are π2. What is the
interior and exterior angle sum of a quadrilateral that contains two vertices?
–2– Since the cube is a topological sphere, it’s not really clear what the inside of a
quadrilateral is. The quadrilateral divides the cube into two regions (usually
one is smaller than the other). For problem 13, we could say that the region
containing the other six vertices is the interior. Compute the interior and
exterior angle sums with this interpretation.
–3– In my proof of Theorem 20, did I do a lot of algebraic computations? Why?
14. INTERIOR AND EXTERIOR ANGLE SUMS OF POLYGONS 153
Figure 21. If you cut out and tape this cube together, you will see a
pair of geodesics forming a 2-gon.

14. INTERIOR AND EXTERIOR ANGLE SUMS OF POLYGONS 154
Figure 22. Here’s another 2-gon on the cube.

14. INTERIOR AND EXTERIOR ANGLE SUMS OF POLYGONS 155
θ
1a
2a2b
3a
3b
4a
4b
5a 5b
6a
6b
7a7b
8b8a
1b
Figure 23. This is an extra copy of Figure 19. Cut out figure and
tape along dotted edges.

14. INTERIOR AND EXTERIOR ANGLE SUMS OF POLYGONS 156
C C C
B B
A
D
E
F F
Figure 24. This is an extra version of Figure 20. Cut out the figure
and tape the dotted edges together.





























