Embed Size (px)
Citation preview

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization and Polar codes
Emre Telatar
EPFL
Hong Kong — January, 2013

Setting Brick Mortar Polar Speed Complexity Sincerely,
Extremal Channels
Among all channels, there are two classes for which it is easy tocommunicate optimally:
The perfect channels: the output Y determines the input X .
The useless channels: the output Y is independent of theinput X .
Arıkan’s polar coding is a technique to convert any binary-inputchannel to a mixture of binary-input extremal channels.
The technique is information lossless, and of low complexity?.
I am not the inventor of this technique.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Extremal Channels
Among all channels, there are two classes for which it is easy tocommunicate optimally:
The perfect channels: the output Y determines the input X .
The useless channels: the output Y is independent of theinput X .
Arıkan’s polar coding is a technique to convert any binary-inputchannel to a mixture of binary-input extremal channels.
The technique is information lossless, and of low complexity?.
I am not the inventor of this technique.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Extremal Channels
Among all channels, there are two classes for which it is easy tocommunicate optimally:
The perfect channels: the output Y determines the input X .
The useless channels: the output Y is independent of theinput X .
Arıkan’s polar coding is a technique to convert any binary-inputchannel to a mixture of binary-input extremal channels.
The technique is information lossless, and of low complexity?.
I am not the inventor of this technique.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Extremal Channels
Among all channels, there are two classes for which it is easy tocommunicate optimally:
The perfect channels: the output Y determines the input X .
The useless channels: the output Y is independent of theinput X .
Arıkan’s polar coding is a technique to convert any binary-inputchannel to a mixture of binary-input extremal channels.
The technique is information lossless, and of low complexity?.
I am not the inventor of this technique.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Extremal Channels
Among all channels, there are two classes for which it is easy tocommunicate optimally:
The perfect channels: the output Y determines the input X .
The useless channels: the output Y is independent of theinput X .
Arıkan’s polar coding is a technique to convert any binary-inputchannel to a mixture of binary-input extremal channels.
The technique is information lossless, and of low complexity?.
I am not the inventor of this technique.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Extremal Channels
Among all channels, there are two classes for which it is easy tocommunicate optimally:
The perfect channels: the output Y determines the input X .
The useless channels: the output Y is independent of theinput X .
Arıkan’s polar coding is a technique to convert any binary-inputchannel to a mixture of binary-input extremal channels.
The technique is information lossless, and of low complexity?.
I am not the inventor of this technique.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
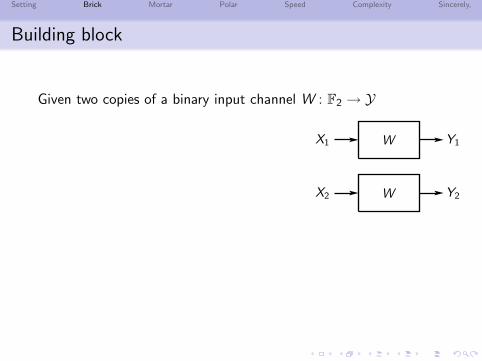
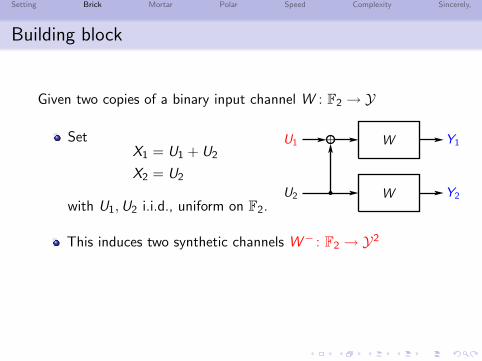
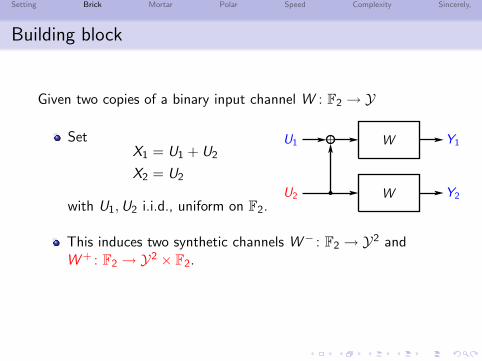
Given two copies of a binary input channel W : F2 → Y
SetX1 = U1 + U2
X2 = U2
with U1,U2 i.i.d., uniform on F2.
W
WX1
X2
Y1
Y2
This induces two synthetic channels W− : F2 → Y2
andW + : F2 → Y2 × F2.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Given two copies of a binary input channel W : F2 → Y
SetX1 = U1 + U2
X2 = U2
with U1,U2 i.i.d., uniform on F2.W
WU1
U2
+ Y1
Y2
This induces two synthetic channels W− : F2 → Y2
andW + : F2 → Y2 × F2.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Given two copies of a binary input channel W : F2 → Y
SetX1 = U1 + U2
X2 = U2
with U1,U2 i.i.d., uniform on F2.W
WU1
U2
+ Y1
Y2
This induces two synthetic channels W− : F2 → Y2
andW + : F2 → Y2 × F2.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Given two copies of a binary input channel W : F2 → Y
SetX1 = U1 + U2
X2 = U2
with U1,U2 i.i.d., uniform on F2.W
WU1
U2
+ Y1
Y2
This induces two synthetic channels W− : F2 → Y2 andW + : F2 → Y2 × F2.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W−
W +
We already begin to see some extremalization: W + is betterthan W , while W− is worse.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− has input U1, output (Y1,Y2) =
W +
We already begin to see some extremalization: W + is betterthan W , while W− is worse.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− has input U1, output (Y1,Y2) = (U1 + U2,U2)
W +
We already begin to see some extremalization: W + is betterthan W , while W− is worse.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− has input U1, output (Y1,Y2) = (U1 + U2, ? )
W +
We already begin to see some extremalization: W + is betterthan W , while W− is worse.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− has input U1, output (Y1,Y2) = ( ? ,U2)
W +
We already begin to see some extremalization: W + is betterthan W , while W− is worse.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− has input U1, output (Y1,Y2) = ( ? , ? )
W +
We already begin to see some extremalization: W + is betterthan W , while W− is worse.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− is a BEC(2p − p2).
W +
We already begin to see some extremalization: W + is betterthan W , while W− is worse.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− is a BEC(2p − p2).
W + has input U2, output (Y1,Y2,U1) =
We already begin to see some extremalization: W + is betterthan W , while W− is worse.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− is a BEC(2p − p2).
W + has input U2, output (Y1,Y2,U1) = (U1 + U2,U2,U1)
We already begin to see some extremalization: W + is betterthan W , while W− is worse.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
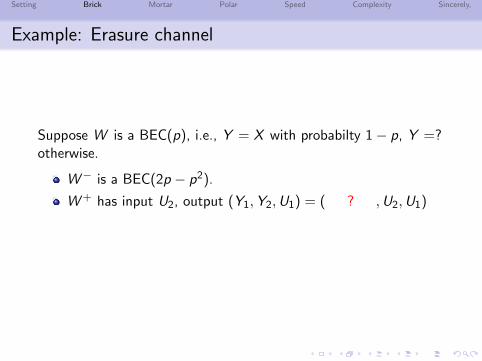
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− is a BEC(2p − p2).
W + has input U2, output (Y1,Y2,U1) = ( ? ,U2,U1)
We already begin to see some extremalization: W + is betterthan W , while W− is worse.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− is a BEC(2p − p2).
W + has input U2, output (Y1,Y2,U1) = (U1 + U2, ? ,U1)
We already begin to see some extremalization: W + is betterthan W , while W− is worse.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
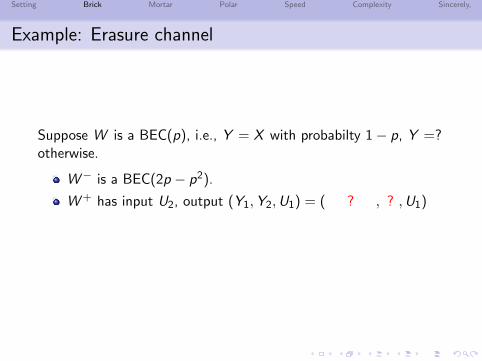
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− is a BEC(2p − p2).
W + has input U2, output (Y1,Y2,U1) = ( ? , ? ,U1)
We already begin to see some extremalization: W + is betterthan W , while W− is worse.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− is a BEC(2p − p2).
W + is a BEC(p2).
We already begin to see some extremalization: W + is betterthan W , while W− is worse.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Example: Erasure channel
Suppose W is a BEC(p), i.e., Y = X with probabilty 1− p, Y =?otherwise.
W− is a BEC(2p − p2).
W + is a BEC(p2).
We already begin to see some extremalization: W + is betterthan W , while W− is worse.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
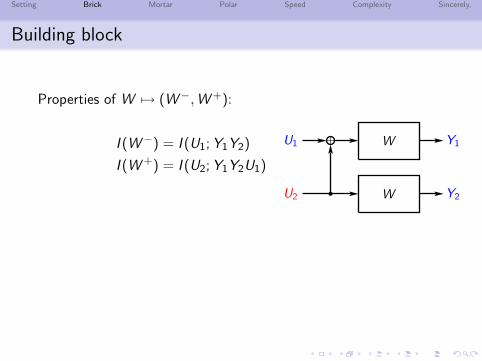
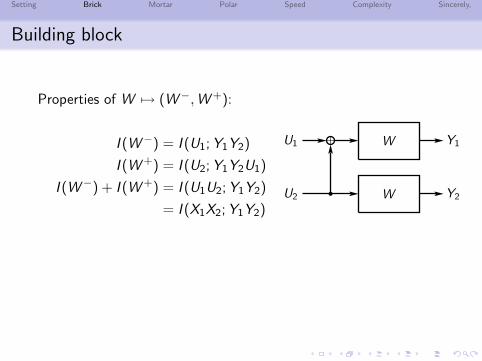
Properties of W 7→ (W−,W +):
I (W−) = I (U1; Y1Y2)
I (W +) = I (U2; Y1Y2U1)
I (W−) + I (W +) = I (U1U2; Y1Y2)
= I (X1X2; Y1Y2)
W
WU1
U2
+ Y1
Y2
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W )
≥ I (W−).
Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
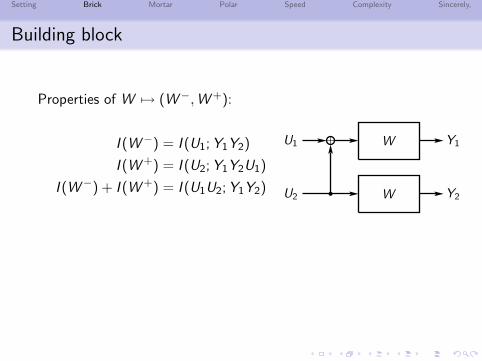
Properties of W 7→ (W−,W +):
I (W−) = I (U1; Y1Y2)
I (W +) = I (U2; Y1Y2U1)
I (W−) + I (W +) = I (U1U2; Y1Y2)
= I (X1X2; Y1Y2)
W
WU1
U2
+ Y1
Y2
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W )
≥ I (W−).
Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Properties of W 7→ (W−,W +):
I (W−) = I (U1; Y1Y2)
I (W +) = I (U2; Y1Y2U1)
I (W−) + I (W +) = I (U1U2; Y1Y2)
= I (X1X2; Y1Y2)
W
WU1
U2
+ Y1
Y2
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W )
≥ I (W−).
Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Properties of W 7→ (W−,W +):
I (W−) = I (U1; Y1Y2)
I (W +) = I (U2; Y1Y2U1)
I (W−) + I (W +) = I (U1U2; Y1Y2)
= I (X1X2; Y1Y2)W
WU1
U2
+ Y1
Y2
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W )
≥ I (W−).

Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Properties of W 7→ (W−,W +):
I (W−) = I (U1; Y1Y2)
I (W +) = I (U2; Y1Y2U1)
I (W−) + I (W +) = I (U1U2; Y1Y2)
= I (X1X2; Y1Y2)W
WU1
U2
+ Y1
Y2
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W )
≥ I (W−).

Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Properties of W 7→ (W−,W +):
I (W−) = I (U1; Y1Y2)
I (W +) = I (U2; Y1Y2U1)
I (W−) + I (W +) = I (U1U2; Y1Y2)
= I (X1X2; Y1Y2)W
WU1
U2
+ Y1
Y2
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W )
≥ I (W−).

Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Properties of W 7→ (W−,W +):
I (W−) = I (U1; Y1Y2)
I (W +) = I (U2; Y1Y2U1)
I (W−) + I (W +) = I (U1U2; Y1Y2)
= I (X1X2; Y1Y2)W
WU1
U2
+ Y1
Y2
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W ) ≥ I (W−).

Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
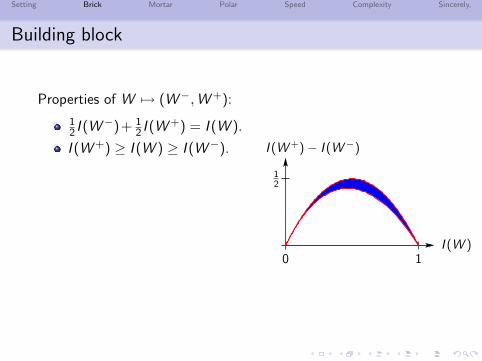
Properties of W 7→ (W−,W +):
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W ) ≥ I (W−).
‘Guaranteed progress’ unlessalready extremal:
|I (W±)− I (W )| < δ implies
I (W ) 6∈ (ε, 1− ε),
with ε(δ)→ 0 as δ → 0.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Properties of W 7→ (W−,W +):
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W ) ≥ I (W−).
‘Guaranteed progress’ unlessalready extremal:
|I (W±)− I (W )| < δ implies
I (W ) 6∈ (ε, 1− ε),
with ε(δ)→ 0 as δ → 0.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Properties of W 7→ (W−,W +):
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W ) ≥ I (W−).
‘Guaranteed progress’ unlessalready extremal:
|I (W±)− I (W )| < δ implies
I (W ) 6∈ (ε, 1− ε),
with ε(δ)→ 0 as δ → 0.
I (W +)− I (W−)
I (W )0 1
12

Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Properties of W 7→ (W−,W +):
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W ) ≥ I (W−).
‘Guaranteed progress’ unlessalready extremal:
|I (W±)− I (W )| < δ implies
I (W ) 6∈ (ε, 1− ε),
with ε(δ)→ 0 as δ → 0.
I (W +)− I (W−)
I (W )0 1
12

Setting Brick Mortar Polar Speed Complexity Sincerely,
Building block
Properties of W 7→ (W−,W +):
12 I (W−) + 1
2 I (W +) = I (W ).
I (W +) ≥ I (W ) ≥ I (W−).
‘Guaranteed progress’ unlessalready extremal:
|I (W±)− I (W )| < δ implies
I (W ) 6∈ (ε, 1− ε),
with ε(δ)→ 0 as δ → 0.
I (W +)− I (W−)
I (W )0 1
12

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization construction
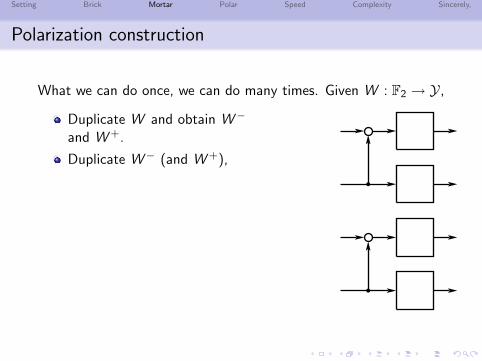
What we can do once, we can do many times.
Given W : F2 → Y,
Duplicate W and obtain W−
and W +.
Duplicate W− (and W +),
and obtain W−− and W−+
(and W +− and W ++).
Duplicate W−− (and W−+,W +−, W ++) and obtainW−−− and W−−+ (andW−+−, W−++, W +−−,W +−+, W ++−, W +++).
. . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization construction
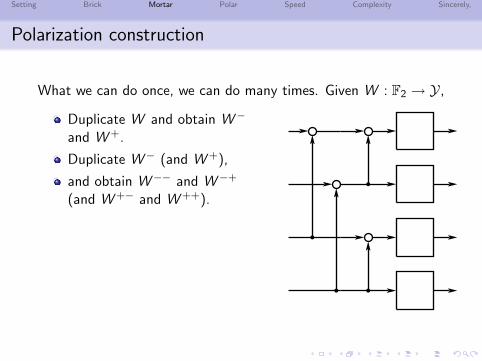
What we can do once, we can do many times. Given W : F2 → Y,
Duplicate W and obtain W−
and W +.
Duplicate W− (and W +),
and obtain W−− and W−+
(and W +− and W ++).
Duplicate W−− (and W−+,W +−, W ++) and obtainW−−− and W−−+ (andW−+−, W−++, W +−−,W +−+, W ++−, W +++).
. . .
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization construction
What we can do once, we can do many times. Given W : F2 → Y,
Duplicate W and obtain W−
and W +.
Duplicate W− (and W +),
and obtain W−− and W−+
(and W +− and W ++).
Duplicate W−− (and W−+,W +−, W ++) and obtainW−−− and W−−+ (andW−+−, W−++, W +−−,W +−+, W ++−, W +++).
. . .
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization construction
What we can do once, we can do many times. Given W : F2 → Y,
Duplicate W and obtain W−
and W +.
Duplicate W− (and W +),
and obtain W−− and W−+
(and W +− and W ++).
Duplicate W−− (and W−+,W +−, W ++) and obtainW−−− and W−−+ (andW−+−, W−++, W +−−,W +−+, W ++−, W +++).
. . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization construction
What we can do once, we can do many times. Given W : F2 → Y,
Duplicate W and obtain W−
and W +.
Duplicate W− (and W +),
and obtain W−− and W−+
(and W +− and W ++).
Duplicate W−− (and W−+,W +−, W ++) and obtainW−−− and W−−+ (andW−+−, W−++, W +−−,W +−+, W ++−, W +++).
. . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization construction
What we can do once, we can do many times. Given W : F2 → Y,
Duplicate W and obtain W−
and W +.
Duplicate W− (and W +),
and obtain W−− and W−+
(and W +− and W ++).
Duplicate W−− (and W−+,W +−, W ++) and obtainW−−− and W−−+ (andW−+−, W−++, W +−−,W +−+, W ++−, W +++).
. . .
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization construction
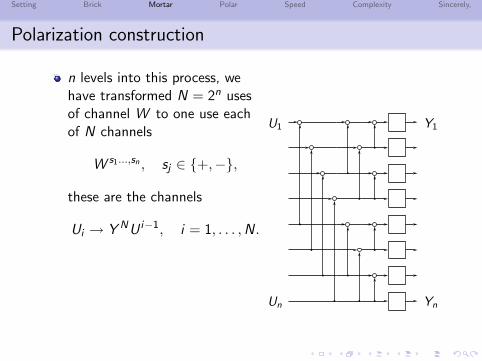
n levels into this process, wehave transformed N = 2n usesof channel W to one use eachof N channels
W s1...,sn , sj ∈ {+,−},
these are the channels
Ui → Y NU i−1, i = 1, . . . ,N.
The quantities{I (W s1...sn)
}are
exactly the N quantities
I (Ui ; YnU i−1), i = 1, . . . ,N
U1 Y1
Un Yn

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization construction
n levels into this process, wehave transformed N = 2n usesof channel W to one use eachof N channels
W s1...,sn , sj ∈ {+,−},
these are the channels
Ui → Y NU i−1, i = 1, . . . ,N.
The quantities{I (W s1...sn)
}are
exactly the N quantities
I (Ui ; YnU i−1), i = 1, . . . ,N
U1 Y1
Un Yn

Setting Brick Mortar Polar Speed Complexity Sincerely,
Are the synthetic channels ‘real’?On successive decoding
The quantities I (Ui ; YNU i−1) are
relevant for a genie-aided decoder:
U1 = φ1(Y N)
U2 = φ2(Y N ,U1)
U3 = φ3(Y N ,U2)
. . .
UN = φN(Y N ,UN−1)
vs
Standalone decoder:
U1 = φ1(Y N)
U2 = φ2(Y N , U1)
U3 = φ3(Y N , U2)
. . .
UN = φN(Y N , UN−1).
If the genie-aided decoder makes no errors, then, the standalonedecoder makes no errors: the synthetic channels are real.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Are the synthetic channels ‘real’?On successive decoding
The quantities I (Ui ; YNU i−1) are
relevant for a genie-aided decoder:
U1 = φ1(Y N)
U2 = φ2(Y N ,U1)
U3 = φ3(Y N ,U2)
. . .
UN = φN(Y N ,UN−1)
vs
Standalone decoder:
U1 = φ1(Y N)
U2 = φ2(Y N , U1)
U3 = φ3(Y N , U2)
. . .
UN = φN(Y N , UN−1).
If the genie-aided decoder makes no errors, then, the standalonedecoder makes no errors: the synthetic channels are real.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Are the synthetic channels ‘real’?On successive decoding
The quantities I (Ui ; YNU i−1) are
relevant for a genie-aided decoder:
U1 = φ1(Y N)
U2 = φ2(Y N ,U1)
U3 = φ3(Y N ,U2)
. . .
UN = φN(Y N ,UN−1)
vs
Standalone decoder:
U1 = φ1(Y N)
U2 = φ2(Y N , U1)
U3 = φ3(Y N , U2)
. . .
UN = φN(Y N , UN−1).
If the genie-aided decoder makes no errors, then, the standalonedecoder makes no errors: the synthetic channels are real.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization
Polarization refers to the phenomenon that in the limit,almost all channels are extremal, i.e.,
1
N#{i : I (Ui ; Y
NU i−1) ∈ (ε, 1− ε)}→ 0
as N = 2n gets large.
If this happens, the good limiting synthetic channels can beused to transmit uncoded data bits — the inputs to the otherchannels can be frozen to fixed values. Since thetransformation is information lossless, The fraction of goodchannels (i.e., data rate) must be I (W ).
The decoder can decode U1, U2, . . . , UN successively.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization
Polarization refers to the phenomenon that in the limit,almost all channels are extremal, i.e.,
1
N#{i : I (Ui ; Y
NU i−1) ∈ (ε, 1− ε)}→ 0
as N = 2n gets large.
If this happens, the good limiting synthetic channels can beused to transmit uncoded data bits — the inputs to the otherchannels can be frozen to fixed values. Since thetransformation is information lossless, The fraction of goodchannels (i.e., data rate) must be I (W ).
The decoder can decode U1, U2, . . . , UN successively.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization
Polarization refers to the phenomenon that in the limit,almost all channels are extremal, i.e.,
1
N#{i : I (Ui ; Y
NU i−1) ∈ (ε, 1− ε)}→ 0
as N = 2n gets large.
If this happens, the good limiting synthetic channels can beused to transmit uncoded data bits — the inputs to the otherchannels can be frozen to fixed values. Since thetransformation is information lossless, The fraction of goodchannels (i.e., data rate) must be I (W ).
The decoder can decode U1, U2, . . . , UN successively.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization happens
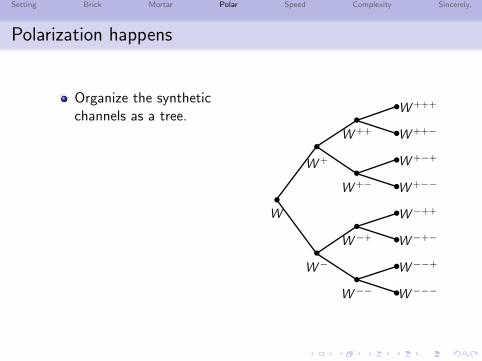
Organize the syntheticchannels as a tree.
Pick a random path.
The I (·) sequence weencounter form a boundedmartingale.
This sequence converges foralmost all paths.
Can’t converge to anon-extremal value becauseof the ‘guaranteed progress’property.
W
W−
W +
W−−
W−+
W +−
W ++
W−−−
W−−+
W−+−
W−++
W +−−
W +−+
W ++−
W +++

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization happens
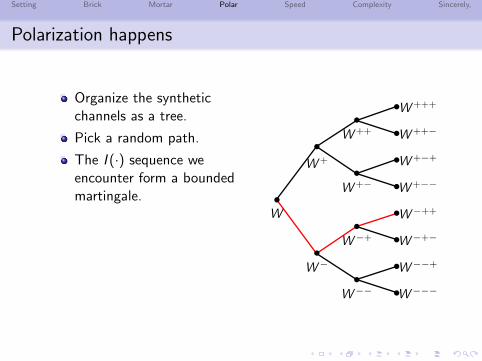
Organize the syntheticchannels as a tree.
Pick a random path.
The I (·) sequence weencounter form a boundedmartingale.
This sequence converges foralmost all paths.
Can’t converge to anon-extremal value becauseof the ‘guaranteed progress’property.
W
W−
W +
W−−
W−+
W +−
W ++
W−−−
W−−+
W−+−
W−++
W +−−
W +−+
W ++−
W +++
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization happens
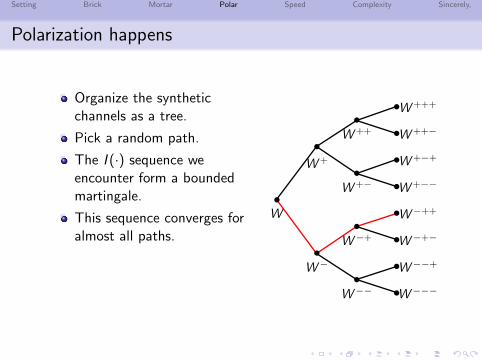
Organize the syntheticchannels as a tree.
Pick a random path.
The I (·) sequence weencounter form a boundedmartingale.
This sequence converges foralmost all paths.
Can’t converge to anon-extremal value becauseof the ‘guaranteed progress’property.
W
W−
W +
W−−
W−+
W +−
W ++
W−−−
W−−+
W−+−
W−++
W +−−
W +−+
W ++−
W +++
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization happens
Organize the syntheticchannels as a tree.
Pick a random path.
The I (·) sequence weencounter form a boundedmartingale.
This sequence converges foralmost all paths.
Can’t converge to anon-extremal value becauseof the ‘guaranteed progress’property.
W
W−
W +
W−−
W−+
W +−
W ++
W−−−
W−−+
W−+−
W−++
W +−−
W +−+
W ++−
W +++

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization happens
Organize the syntheticchannels as a tree.
Pick a random path.
The I (·) sequence weencounter form a boundedmartingale.
This sequence converges foralmost all paths.
Can’t converge to anon-extremal value becauseof the ‘guaranteed progress’property.
W
W−
W +
W−−
W−+
W +−
W ++
W−−−
W−−+
W−+−
W−++
W +−−
W +−+
W ++−
W +++

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization happens
Theorem
For any ε > 0, as N = 2n gets large
1
N#{
(s1, . . . , sn) : I (W s1...sn) ∈ (ε, 1− ε)}→ 0.
Theorem
1
N#{
(s1, . . . , sn) : I (W s1...sn) ∈ (εN , 1− εN)}→ 0.
even when εN = 2−N0.5−

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization happens fast enough
Theorem
For any ε > 0, as N = 2n gets large
1
N#{
(s1, . . . , sn) : I (W s1...sn) ∈ (ε, 1− ε)}→ 0.
Theorem
1
N#{
(s1, . . . , sn) : I (W s1...sn) ∈ (εN , 1− εN)}→ 0.
even when εN = 2−N0.5−

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
The polarization speed quoted in the previous slide is morethan sufficient to arrest error propagation.
To show such a fantastic speed, introduce
Z (W ) =∑y
√W (y |0)W (y |1)
as a companion to I (W ). Note that this is an upper bound onprobability of error for uncoded transmission over W .
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
The polarization speed quoted in the previous slide is morethan sufficient to arrest error propagation.
To show such a fantastic speed, introduce
Z (W ) =∑y
√W (y |0)W (y |1)
as a companion to I (W ). Note that this is an upper bound onprobability of error for uncoded transmission over W .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
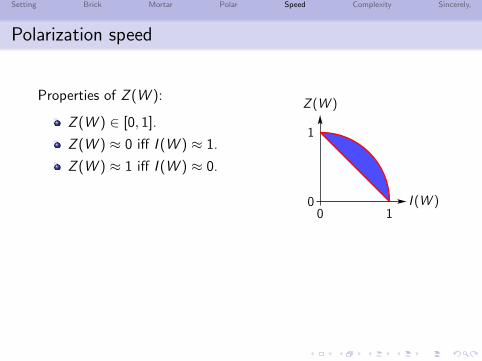
Properties of Z (W ):
Z (W ) ∈ [0, 1].
Z (W ) ≈ 0 iff I (W ) ≈ 1.
Z (W ) ≈ 1 iff I (W ) ≈ 0.
Z (W +) = Z (W )2.
Z (W−) ≤ 2Z (W ).
Since Z (W ) upper bounds on probability of error for uncodedtransmission over W , we can choose the good indices on the basisof Z (W ). The sum of the Z ’s of the chosen channels will upperbound the block error probability. This suggests studying thepolarization speed of Z .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
Properties of Z (W ):
Z (W ) ∈ [0, 1].
Z (W ) ≈ 0 iff I (W ) ≈ 1.
Z (W ) ≈ 1 iff I (W ) ≈ 0.
Z (W +) = Z (W )2.
Z (W−) ≤ 2Z (W ).
Z (W )
I (W )
1
10
0
Since Z (W ) upper bounds on probability of error for uncodedtransmission over W , we can choose the good indices on the basisof Z (W ). The sum of the Z ’s of the chosen channels will upperbound the block error probability. This suggests studying thepolarization speed of Z .
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
Properties of Z (W ):
Z (W ) ∈ [0, 1].
Z (W ) ≈ 0 iff I (W ) ≈ 1.
Z (W ) ≈ 1 iff I (W ) ≈ 0.
Z (W +) = Z (W )2.
Z (W−) ≤ 2Z (W ).
Z (W )
I (W )
1
10
0
Since Z (W ) upper bounds on probability of error for uncodedtransmission over W , we can choose the good indices on the basisof Z (W ). The sum of the Z ’s of the chosen channels will upperbound the block error probability. This suggests studying thepolarization speed of Z .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
Properties of Z (W ):
Z (W ) ∈ [0, 1].
Z (W ) ≈ 0 iff I (W ) ≈ 1.
Z (W ) ≈ 1 iff I (W ) ≈ 0.
Z (W +) = Z (W )2.
Z (W−) ≤ 2Z (W ).
Z (W )
I (W )
1
10
0
Since Z (W ) upper bounds on probability of error for uncodedtransmission over W , we can choose the good indices on the basisof Z (W ). The sum of the Z ’s of the chosen channels will upperbound the block error probability. This suggests studying thepolarization speed of Z .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
Properties of Z (W ):
Z (W ) ∈ [0, 1].
Z (W ) ≈ 0 iff I (W ) ≈ 1.
Z (W ) ≈ 1 iff I (W ) ≈ 0.
Z (W +) = Z (W )2.
Z (W−) ≤ 2Z (W ).
Z (W )
I (W )
1
10
0
Since Z (W ) upper bounds on probability of error for uncodedtransmission over W , we can choose the good indices on the basisof Z (W ). The sum of the Z ’s of the chosen channels will upperbound the block error probability. This suggests studying thepolarization speed of Z .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
Properties of Z (W ):
Z (W ) ∈ [0, 1].
Z (W ) ≈ 0 iff I (W ) ≈ 1.
Z (W ) ≈ 1 iff I (W ) ≈ 0.
Z (W +) = Z (W )2.
Z (W−) ≤ 2Z (W ).
Z (W )
I (W )
1
10
0
Since Z (W ) upper bounds on probability of error for uncodedtransmission over W , we can choose the good indices on the basisof Z (W ). The sum of the Z ’s of the chosen channels will upperbound the block error probability. This suggests studying thepolarization speed of Z .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
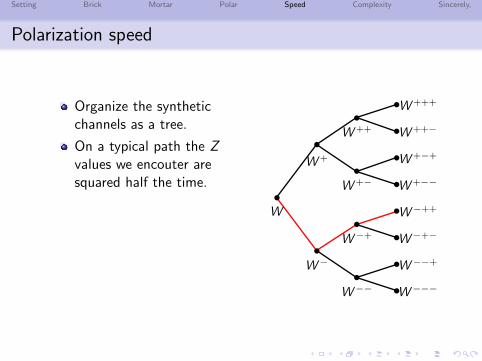
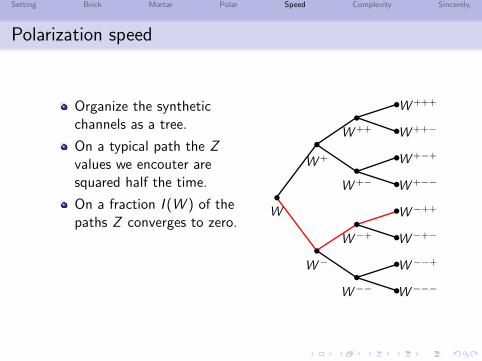
Organize the syntheticchannels as a tree.
On a typical path the Zvalues we encouter aresquared half the time.
On a fraction I (W ) of thepaths Z converges to zero.
On a ‘typical’ such path, Zapproaches zero likeexp(−2n/2).
W
W−
W +
W−−
W−+
W +−
W ++
W−−−
W−−+
W−+−
W−++
W +−−
W +−+
W ++−
W +++
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
Organize the syntheticchannels as a tree.
On a typical path the Zvalues we encouter aresquared half the time.
On a fraction I (W ) of thepaths Z converges to zero.
On a ‘typical’ such path, Zapproaches zero likeexp(−2n/2).
W
W−
W +
W−−
W−+
W +−
W ++
W−−−
W−−+
W−+−
W−++
W +−−
W +−+
W ++−
W +++
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
Organize the syntheticchannels as a tree.
On a typical path the Zvalues we encouter aresquared half the time.
On a fraction I (W ) of thepaths Z converges to zero.
On a ‘typical’ such path, Zapproaches zero likeexp(−2n/2).
W
W−
W +
W−−
W−+
W +−
W ++
W−−−
W−−+
W−+−
W−++
W +−−
W +−+
W ++−
W +++

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
Organize the syntheticchannels as a tree.
On a typical path the Zvalues we encouter aresquared half the time.
On a fraction I (W ) of thepaths Z converges to zero.
On a ‘typical’ such path, Zapproaches zero likeexp(−2n/2).
W
W−
W +
W−−
W−+
W +−
W ++
W−−−
W−−+
W−+−
W−++
W +−−
W +−+
W ++−
W +++

Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
Organize the syntheticchannels as a tree.
On a typical path the Zvalues we encouter aresquared half the time.
On a fraction I (W ) of thepaths Z converges to zero.
On a ‘typical’ such path, Zapproaches zero likeexp(−2n/2).
W
W−
W +
W−−
W−+
W +−
W ++
W−−−
W−−+
W−+−
W−++
W +−−
W +−+
W ++−
W +++
Setting Brick Mortar Polar Speed Complexity Sincerely,
Polarization speed
After taking care of the ugly details with ε’s and δ’s,
Theorem
For any β < 1/2,
limn→∞
1
N#{
(s1, . . . , sn) : Z(W s1...sn
)< exp(−Nβ)
}= I (W )

Setting Brick Mortar Polar Speed Complexity Sincerely,
Decoding Complexity
The ‘butterfly’ structure of the encoder ensures O(N log N)encoding complexity.
For the decoding we need to compute
LR(s1, . . . , sn) :=W s1...sn(·|0)
W s1...sn(·|1)
But
LR(s1, . . . , sn−1,+) = LR1(s1, . . . , sn−1) · LR2(s1, . . . , sn−1)1−2ui
LR(s1, . . . , sn−1,−) =LR1(s1, . . . , sn−1) + LR2(s1, . . . , sn−1)
1 + LR1(s1, . . . , sn−1)LR2(s1, . . . , sn−1)
So, the computation of the LR’s is amenable to divide andconquer, and can also be done in N log N effort.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Decoding Complexity
The ‘butterfly’ structure of the encoder ensures O(N log N)encoding complexity.
For the decoding we need to compute
LR(s1, . . . , sn) :=W s1...sn(·|0)
W s1...sn(·|1)
But
LR(s1, . . . , sn−1,+) = LR1(s1, . . . , sn−1) · LR2(s1, . . . , sn−1)1−2ui
LR(s1, . . . , sn−1,−) =LR1(s1, . . . , sn−1) + LR2(s1, . . . , sn−1)
1 + LR1(s1, . . . , sn−1)LR2(s1, . . . , sn−1)
So, the computation of the LR’s is amenable to divide andconquer, and can also be done in N log N effort.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Decoding Complexity
The ‘butterfly’ structure of the encoder ensures O(N log N)encoding complexity.
For the decoding we need to compute
LR(s1, . . . , sn) :=W s1...sn(·|0)
W s1...sn(·|1)
But
LR(s1, . . . , sn−1,+) = LR1(s1, . . . , sn−1) · LR2(s1, . . . , sn−1)1−2ui
LR(s1, . . . , sn−1,−) =LR1(s1, . . . , sn−1) + LR2(s1, . . . , sn−1)
1 + LR1(s1, . . . , sn−1)LR2(s1, . . . , sn−1)
So, the computation of the LR’s is amenable to divide andconquer, and can also be done in N log N effort.

Setting Brick Mortar Polar Speed Complexity Sincerely,
So far
Polar codes are I (W ) achieving,
encoding complexity is N log N,
with successive decoding, the decoding complexity is N log N,
probability of error decays like 2−√
N .
Moreover, one can identify almost all the ‘good’ channels withN log2+ N computational effort.
. . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
So far
Polar codes are I (W ) achieving,
encoding complexity is N log N,
with successive decoding, the decoding complexity is N log N,
probability of error decays like 2−√
N .
Moreover, one can identify almost all the ‘good’ channels withN log2+ N computational effort.
. . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
So far
Polar codes are I (W ) achieving,
encoding complexity is N log N,
with successive decoding, the decoding complexity is N log N,
probability of error decays like 2−√
N .
Moreover, one can identify almost all the ‘good’ channels withN log2+ N computational effort.
. . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
So far
Polar codes are I (W ) achieving,
encoding complexity is N log N,
with successive decoding, the decoding complexity is N log N,
probability of error decays like 2−√
N .
Moreover, one can identify almost all the ‘good’ channels withN log2+ N computational effort.
. . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
So far
Polar codes are I (W ) achieving,
encoding complexity is N log N,
with successive decoding, the decoding complexity is N log N,
probability of error decays like 2−√
N .
Moreover, one can identify almost all the ‘good’ channels withN log2+ N computational effort.
. . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
So far
Polar codes are I (W ) achieving,
encoding complexity is N log N,
with successive decoding, the decoding complexity is N log N,
probability of error decays like 2−√
N .
Moreover, one can identify almost all the ‘good’ channels withN log2+ N computational effort.
. . .
Setting Brick Mortar Polar Speed Complexity Sincerely,
So far
Polar codes are I (W ) achieving,
encoding complexity is N log N,
with successive decoding, the decoding complexity is N log N,
probability of error decays like 2−√
N .
Moreover, one can identify almost all the ‘good’ channels withN log2+ N computational effort.
. . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Moreover
For symmetric channels the construction is deterministic.There is no “choose from this ensemble and verify” step.
The error probability guarantees are not based on simulations— interesting for very low error probability applications.
Generalizes to channels with arbitrary discrete inputalphabets: a similar ‘two-by-two’ construction, with samecomplexity and error probability bounds. This allows one toachieve true capacity C (W ) rather than I (W ).
With ‘k-by-k ’ constructions the error probability can be madeto decay almost exponentially in blocklength.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Moreover
For symmetric channels the construction is deterministic.There is no “choose from this ensemble and verify” step.
The error probability guarantees are not based on simulations— interesting for very low error probability applications.
Generalizes to channels with arbitrary discrete inputalphabets: a similar ‘two-by-two’ construction, with samecomplexity and error probability bounds. This allows one toachieve true capacity C (W ) rather than I (W ).
With ‘k-by-k ’ constructions the error probability can be madeto decay almost exponentially in blocklength.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Moreover
For symmetric channels the construction is deterministic.There is no “choose from this ensemble and verify” step.
The error probability guarantees are not based on simulations— interesting for very low error probability applications.
Generalizes to channels with arbitrary discrete inputalphabets: a similar ‘two-by-two’ construction, with samecomplexity and error probability bounds. This allows one toachieve true capacity C (W ) rather than I (W ).
With ‘k-by-k ’ constructions the error probability can be madeto decay almost exponentially in blocklength.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Moreover
For symmetric channels the construction is deterministic.There is no “choose from this ensemble and verify” step.
The error probability guarantees are not based on simulations— interesting for very low error probability applications.
Generalizes to channels with arbitrary discrete inputalphabets: a similar ‘two-by-two’ construction, with samecomplexity and error probability bounds. This allows one toachieve true capacity C (W ) rather than I (W ).
With ‘k-by-k ’ constructions the error probability can be madeto decay almost exponentially in blocklength.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Moreover
For symmetric channels the construction is deterministic.There is no “choose from this ensemble and verify” step.
The error probability guarantees are not based on simulations— interesting for very low error probability applications.
Generalizes to channels with arbitrary discrete inputalphabets: a similar ‘two-by-two’ construction, with samecomplexity and error probability bounds. This allows one toachieve true capacity C (W ) rather than I (W ).
With ‘k-by-k ’ constructions the error probability can be madeto decay almost exponentially in blocklength.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Extensions
Dual constructions yield vector quantizers that achieve therate distortion bound.
Yields codes that achieve the secrecy capacity of the Wyner’swiretap channel.
Polarizing each user of a MAC yield sum rate bound achievingcodes.
. . . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Extensions
Dual constructions yield vector quantizers that achieve therate distortion bound.
Yields codes that achieve the secrecy capacity of the Wyner’swiretap channel.
Polarizing each user of a MAC yield sum rate bound achievingcodes.
. . . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Extensions
Dual constructions yield vector quantizers that achieve therate distortion bound.
Yields codes that achieve the secrecy capacity of the Wyner’swiretap channel.
Polarizing each user of a MAC yield sum rate bound achievingcodes.
. . . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Extensions
Dual constructions yield vector quantizers that achieve therate distortion bound.
Yields codes that achieve the secrecy capacity of the Wyner’swiretap channel.
Polarizing each user of a MAC yield sum rate bound achievingcodes.
. . . .
Setting Brick Mortar Polar Speed Complexity Sincerely,
Extensions
Dual constructions yield vector quantizers that achieve therate distortion bound.
Yields codes that achieve the secrecy capacity of the Wyner’swiretap channel.
Polarizing each user of a MAC yield sum rate bound achievingcodes.
. . . .

Setting Brick Mortar Polar Speed Complexity Sincerely,
Remarks
Polar codes are easy to teach.
They give a concrete way to do many things that weotherwise show via indirect arguments.
They may prove practical in certain setups. (E.g., multi-levelmodulation, high reliability applications, rate distortion, ...).
Many basic questions still to answer.
Setting Brick Mortar Polar Speed Complexity Sincerely,
Remarks
Polar codes are easy to teach.
They give a concrete way to do many things that weotherwise show via indirect arguments.
They may prove practical in certain setups. (E.g., multi-levelmodulation, high reliability applications, rate distortion, ...).
Many basic questions still to answer.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Remarks
Polar codes are easy to teach.
They give a concrete way to do many things that weotherwise show via indirect arguments.
They may prove practical in certain setups. (E.g., multi-levelmodulation, high reliability applications, rate distortion, ...).
Many basic questions still to answer.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Remarks
Polar codes are easy to teach.
They give a concrete way to do many things that weotherwise show via indirect arguments.
They may prove practical in certain setups. (E.g., multi-levelmodulation, high reliability applications, rate distortion, ...).
Many basic questions still to answer.

Setting Brick Mortar Polar Speed Complexity Sincerely,
Remarks
Polar codes are easy to teach.
They give a concrete way to do many things that weotherwise show via indirect arguments.
They may prove practical in certain setups. (E.g., multi-levelmodulation, high reliability applications, rate distortion, ...).
Many basic questions still to answer.




















![Soft-Covering Exponent - Princeton Universitycuff/publications/cuff_ita_2019.pdfInspired by [Parizi, Telatar, Merhav 17] Solved exponent for KL-divergence. Features of TV Accepted](https://img.pdfslide.us/doc/110x75/601305915ca1235f3916231a/soft-covering-exponent-princeton-university-cuffpublicationscuffita2019pdf.jpg)