Embed Size (px)
Citation preview
PocketDelta Robot
Operating manual
Document ROBOT-POC_Operating_Manual_E
000.100.518
Version A3 Date 13.02.2013


PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Introduction Version: A3
000.100.518 PocketDelta Robot - Operating manual 3/36
Table of Contents
1. INTRODUCTION ............................................................................................................................... 5
1.1. GENERALITIES .......................................................................................................................... 5
1.2. SAFETY PRECAUTIONS ............................................................................................................. 6
1.2.1. General safety precaution ................................................................................................... 6
1.2.2. Specific warnings .................................................................................................................. 7
1.3. WARRANTY INFORMATION ........................................................................................................ 9
1.4. CE INFORMATION ..................................................................................................................... 9
1.5. RELATED MANUALS .................................................................................................................. 9
2. DESCRIPTION ................................................................................................................................ 10
2.1. FIRST GLIMPSE AT THE PRODUCT........................................................................................... 10
2.2. GENERAL CHARACTERISTICS ................................................................................................. 11
2.2.1. Technical features .............................................................................................................. 11
2.2.2. Overall dimensions (in mm) .............................................................................................. 12
2.2.3. Visual signals ...................................................................................................................... 13
2.3. PERFORMANCE ....................................................................................................................... 14
2.3.1. Workspace ........................................................................................................................... 14
2.3.2. Cycle time ............................................................................................................................ 16
2.3.3. Repeatability ........................................................................................................................ 17
2.3.4. Force capability ................................................................................................................... 17
2.4. ELECTRIC INTERFACES .......................................................................................................... 18
2.4.1. Overview .............................................................................................................................. 18
2.4.2. Power connection (A) ......................................................................................................... 19
2.4.3. Main stop switch (B) ........................................................................................................... 19
2.4.4. Input/Output connector (C) ................................................................................................ 20
2.4.5. RJ 45 connector (D) ........................................................................................................... 21
2.5. MECHANICAL INTERFACES ..................................................................................................... 22
2.5.1. Attachment of the robot ..................................................................................................... 22
2.5.2. Mechanical Interface for robot tool ................................................................................... 23
2.6. ACCESSORIES AND OPTIONAL MODULES ............................................................................... 24
2.6.1. Vision-kit .............................................................................................................................. 24
2.6.2. Embedded vertical compliance module .......................................................................... 24
3. TRANSPORTATION, HANDLING AND INSTALLATION ....................................................... 25
3.1. PACKAGING OF THE PRODUCT, TRANSPORTATION AND HANDLING ....................................... 25
3.2. BEFORE UNPACKING ............................................................................................................... 25
3.3. UNPACKING INSTRUCTIONS .................................................................................................... 26
3.4. INSTALLATION AND STORAGE ENVIRONMENT ......................................................................... 28
3.4.1. Installation environment ..................................................................................................... 28

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Introduction Version: A3
000.100.518 PocketDelta Robot - Operating manual 4/36
3.4.2. Storage environment .......................................................................................................... 28
4. MAINTENANCE AND REPARATION ......................................................................................... 29
4.1. SAFETY PRECAUTIONS ........................................................................................................... 29
4.1.1. General safety precautions ............................................................................................... 29
4.1.2. Specific warnings ................................................................................................................ 29
4.2. PERSONNEL RESPONSIBLE FOR MAINTENANCE OR REPARATION .......................................... 29
4.3. MAINTENANCE ........................................................................................................................ 30
4.3.1. Periodic maintenance schedule ....................................................................................... 30
4.3.2. Cleaning robot ..................................................................................................................... 31
4.3.3. Optical parts cleaning ........................................................................................................ 31
4.3.4. Controlling the parallel structure ....................................................................................... 32
4.3.5. Controlling the engine group ............................................................................................. 32
4.3.6. Inspection of the control box ............................................................................................. 32
4.4. REPARATION ........................................................................................................................... 33
4.5. TECHNICAL SUPPORT ............................................................................................................. 34
4.5.1. For better service … ........................................................................................................... 34
4.5.2. Contact ................................................................................................................................. 34

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Introduction Version: A3
000.100.518 PocketDelta Robot - Operating manual 5/36
1. Introduction
1.1. Generalities
The following document is the property of Asyril S.A. and may not be copied or circulated
without permission. The information contained in this document is subject to change without
notice for the purpose of product improvement. Before operating your product, please read
this document in order to ensure a correct use of the product. Nevertheless, if you meet
difficulties during the operation or the maintenance, please, feel free to contact Asyril
customer service.
In this manual, the safety precautions that you must respect are classified as: “Danger”,
“Warning” and “Note”; the following symbols are used :
DANGER!
Failure to observe the instruction may result in death or serious injury.
DANGER!
Failure to observe the instruction may result in electrocution or serious injury due to
electric shock
WARNING!
Failure to observe the instruction may result in injury or property damage.
NOTE :
The user should read carefully this information to ensure the correct use of the product,
although failure to do so would not result in injury.
REFER TO …
For more information on a specific subject, the reader should read other manual, or refer to
other paragraph.
WARNING!
Asyril shall not be liable whatsoever for any loss or damage arising from a failure to observe
the items specified in “Safety Precautions.” The customer is responsible to provide the
necessary instruction to the persons concerned.
NOTE :
All dimensions in this document are expressed in millimeters
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Introduction Version: A3
000.100.518 PocketDelta Robot - Operating manual 6/36
1.2. Safety precautions
1.2.1. General safety precaution
1.2.1.1. Transport
DANGER !
Be aware of the weight and take care when transporting the system. For more
information, please refer to chapter 3 “Transportation, handling and installation”
1.2.1.2. General
DANGER !
Be sure that all power sources and other cables to the unit are disconnected before
working on the product.
DANGER !
Only qualified personnel (trained by Asyril and with professional experience) are
authorized to work on this device.
DANGER !
Do not unscrew the housing of the system controls. Serious injury or death could
result from electric shock. Only authorized personnel from Asyril SA are allowed to
access this part of the system for maintenance or for repair.
DANGER !
Do not plug or unplug cables of the system unless it is switched off.
DANGER !
Never modify the product. Unauthorized modification may cause the product to
malfunction, resulting in injury, electric shock, fire, etc.
DANGER !
Turn off the power to the product in the event of power failure. Failure to do so may
cause the product to suddenly start moving when the power is restored.
DANGER !
Do not use the product in a place where the main unit or controller may come in
contact with water or oil droplets.

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Introduction Version: A3
000.100.518 PocketDelta Robot - Operating manual 7/36
1.2.1.3. Disposal
When the product becomes no longer usable or necessary, dispose of it properly as an
industrial waste.
WARNING!
Observe the valid legal regulation for appropriate disposal protecting environment.
1.2.2. Specific warnings
1.2.2.1. Safety Equipment for Operators
No safety equipment is required to use the PocketDelta robot
NOTE :
It is the customer’s responsibility to evaluate the dangers of its specific process and install the
appropriated signs.
1.2.2.2. Intervention groups
The following table defines the roles affected to each professional involved on the machine at
any time during its life cycle.
Operator Fitter Engineer Support
Carrier
agent Dismantler
Construction X
Transportation X
Installation X X
Commissioning X
Use X
Setting & Programming X
Operation X
Cleaning X X
Recherche de défauts X
Maintenance X
Decommissioning
Dismantling X
Table 1-1: Intervention groups
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Introduction Version: A3
000.100.518 PocketDelta Robot - Operating manual 8/36
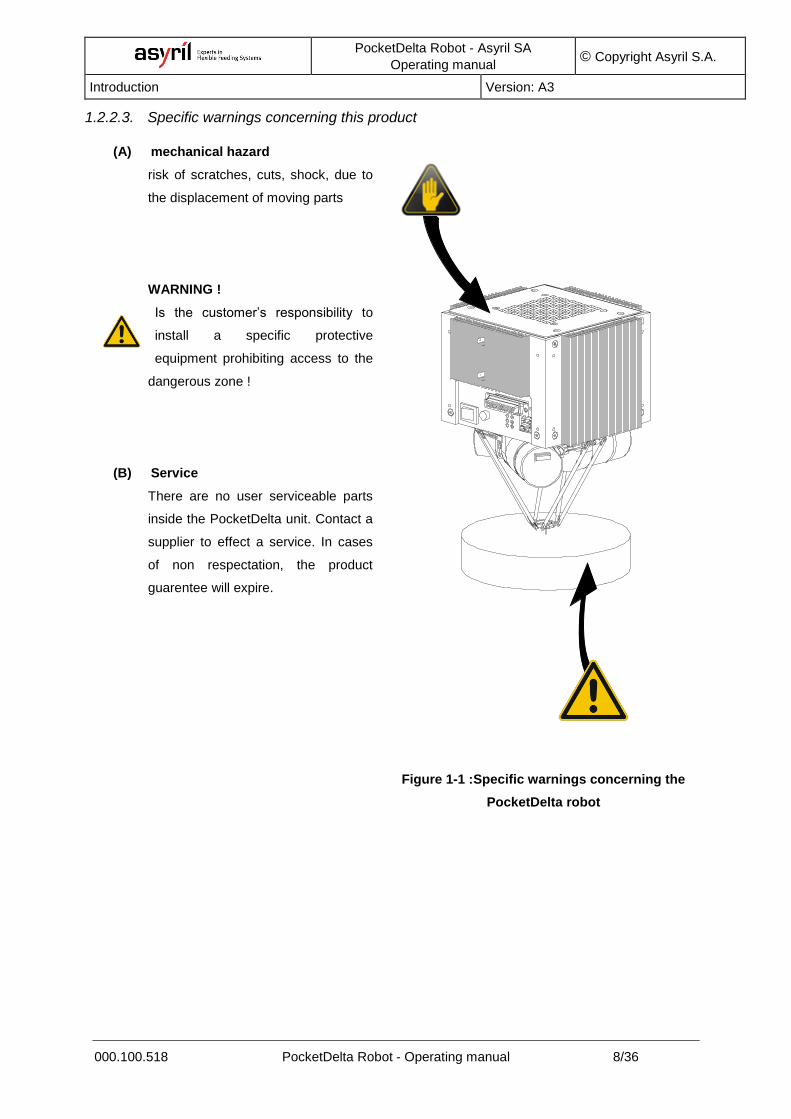
1.2.2.3. Specific warnings concerning this product
(A) mechanical hazard
risk of scratches, cuts, shock, due to
the displacement of moving parts
WARNING !
Is the customer’s responsibility to
install a specific protective
equipment prohibiting access to the
dangerous zone !
(B) Service
There are no user serviceable parts
inside the PocketDelta unit. Contact a
supplier to effect a service. In cases
of non respectation, the product
guarentee will expire.
Figure 1-1 :Specific warnings concerning the
PocketDelta robot
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 9/36
1.3. Warranty information
You will find all the Asyril warranty information (duration, scope of warranty …) on the general
conditions of sale.
1.4. CE information
The original CE certificate for your
product is supplied at the time of
product delivery. “Figure 1-2 :
Specimen of a CE certificate”
provides an example of what your CE
certificate should look like.
Figure 1-2 : Specimen of a CE certificate
1.5. Related manuals
As described in the Table 1-2, this manual is an integral part of the Asyfeed documentation
set. This manual covers the installation, a technical description, the maintenance, and the
reparation of your system. Information on the transport and safety precautions are also
included in this manual.
Manual Title Manual reference Description of the
content
PocketDelta
Operating
manual
ROBOT-POC-01_Operating_Manual_E THIS MANUAL
PocketDelta
Programming
guide
ARL__-XXX-XX_Programming_Guide_F Describes in detail the
way of programming a
PocketDelta robot.
Table 1-2 : related manuals
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 10/36
2. Description
2.1. First glimpse at the product
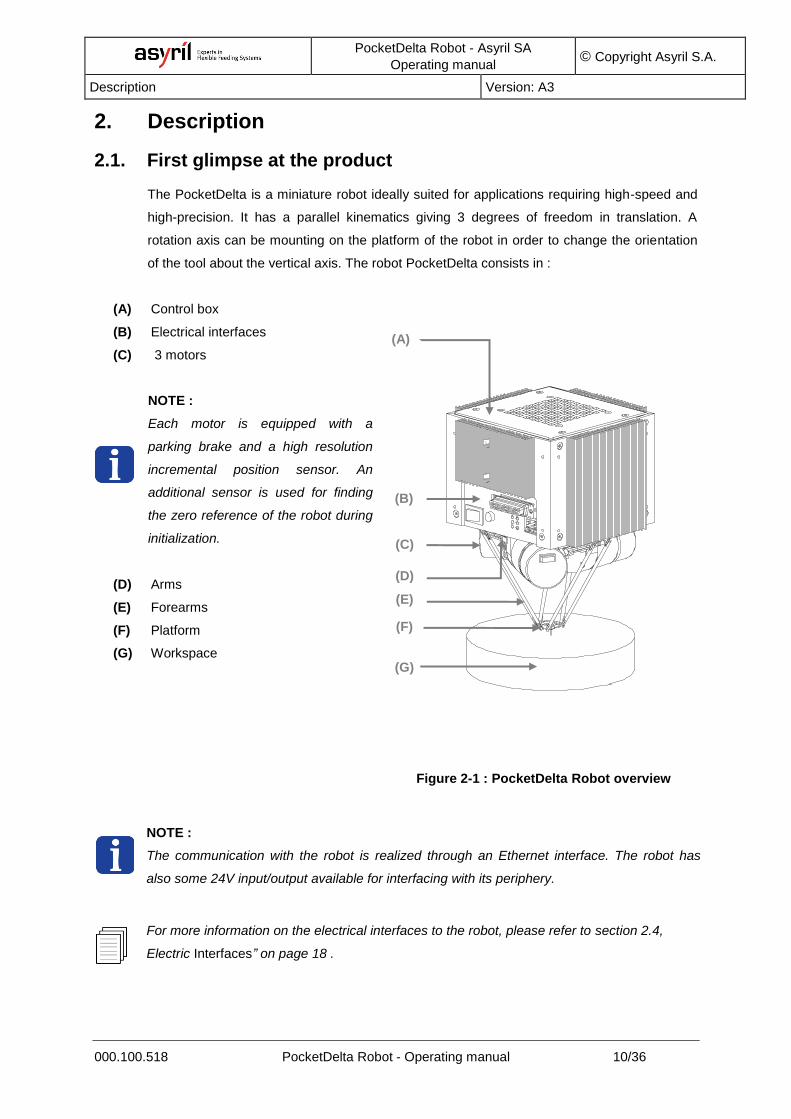
The PocketDelta is a miniature robot ideally suited for applications requiring high-speed and
high-precision. It has a parallel kinematics giving 3 degrees of freedom in translation. A
rotation axis can be mounting on the platform of the robot in order to change the orientation
of the tool about the vertical axis. The robot PocketDelta consists in :
(A) Control box
(B) Electrical interfaces
(C) 3 motors
NOTE :
Each motor is equipped with a
parking brake and a high resolution
incremental position sensor. An
additional sensor is used for finding
the zero reference of the robot during
initialization.
(D) Arms
(E) Forearms
(F) Platform
(G) Workspace
Figure 2-1 : PocketDelta Robot overview
NOTE :
The communication with the robot is realized through an Ethernet interface. The robot has
also some 24V input/output available for interfacing with its periphery.
For more information on the electrical interfaces to the robot, please refer to section 2.4,
Electric Interfaces” on page 18 .
(C)
(A)
(E)
(D)
(F)
(G)
(B)
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 11/36
2.2. General Characteristics
WARNING !
Do not use the product outside the specifications. In particular, observe the maximum loading
capacity. In cases of non-respectation, the product guarantee will expire.
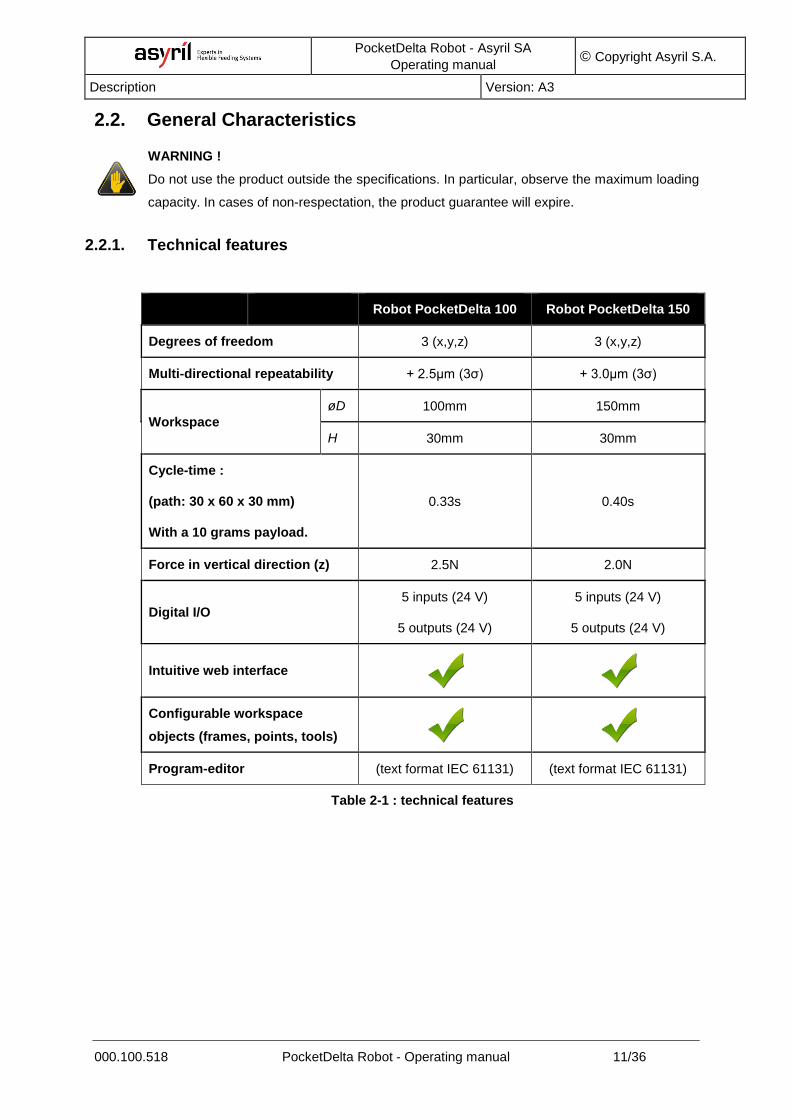
2.2.1. Technical features
Robot PocketDelta 100 Robot PocketDelta 150
Degrees of freedom 3 (x,y,z) 3 (x,y,z)
Multi-directional repeatability + 2.5µm (3σ) + 3.0µm (3σ)
Workspace
øD 100mm 150mm
H 30mm 30mm
Cycle-time :
(path: 30 x 60 x 30 mm)
With a 10 grams payload.
0.33s 0.40s
Force in vertical direction (z) 2.5N 2.0N
Digital I/O 5 inputs (24 V)
5 outputs (24 V)
5 inputs (24 V)
5 outputs (24 V)
Intuitive web interface
Configurable workspace
objects (frames, points, tools)
Program-editor (text format IEC 61131) (text format IEC 61131)
Table 2-1 : technical features
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 12/36
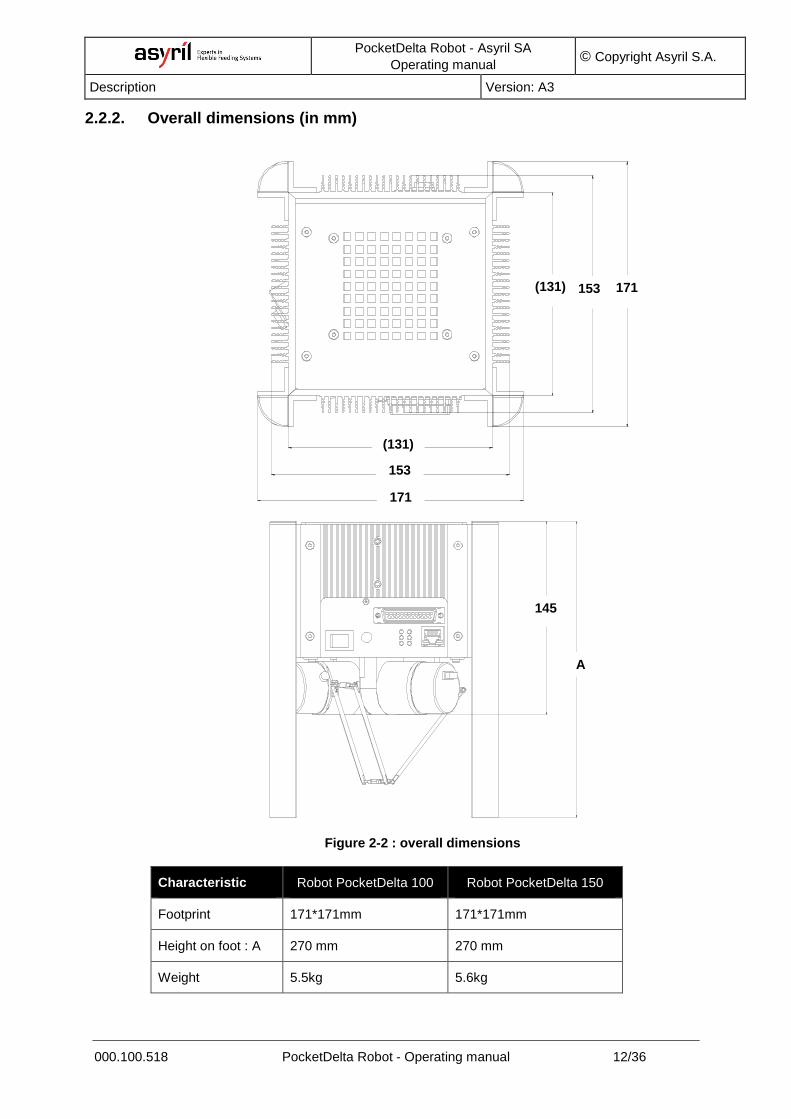
2.2.2. Overall dimensions (in mm)
Figure 2-2 : overall dimensions
Characteristic Robot PocketDelta 100 Robot PocketDelta 150
Footprint 171*171mm 171*171mm
Height on foot : A 270 mm 270 mm
Weight 5.5kg 5.6kg
171
171
145
A
(131)
153
153 (131)

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 13/36
2.2.3. Visual signals
The leds give important information
on the state of the PocketDelta robot :
Led State Meaning
1 Red Drive 1 on
2 Red Drive 2 on
3 Red Drive 3 on
4 X Not wired
5 X Not wired
6 Green Power on
Figure 2-3 : PocketDelta Indicator LED’s
4
5
6
1
2
3
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 14/36
2.3. Performance
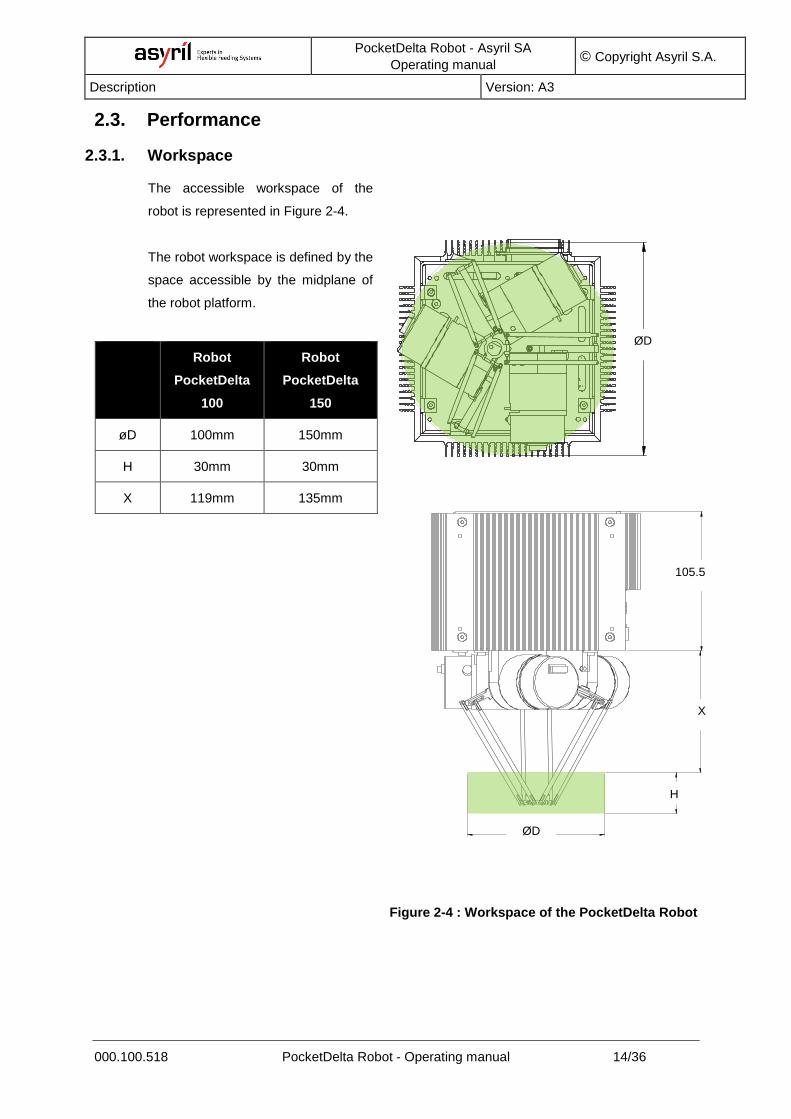
2.3.1. Workspace
The accessible workspace of the
robot is represented in Figure 2-4.
The robot workspace is defined by the
space accessible by the midplane of
the robot platform.
Robot
PocketDelta
100
Robot
PocketDelta
150
øD 100mm 150mm
H 30mm 30mm
X 119mm 135mm
Figure 2-4 : Workspace of the PocketDelta Robot
ØD
ØD
H
X
105.5

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 15/36
The robot workspace is defined by the space accessible by the midplane of the robot
platform. When a tool (or compliance) is mounted on the robot, the workspace will be
translated down as much as the length of the tool (or compliance). The following example
illustrates this phenomenon :
Figure 2-5 : Compliance height
9.5

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 16/36
2.3.2. Cycle time
The cycle time is defined as an a/b/c pick and place motion with an elevation of a, an
horizontal motion of b and a down motion on a distance c as defined on the figure below :
Figure 2-6 : Trajectory used for the cycle time measurement
NOTE
The cycle time depends not only on the distance travelled by the robot’s platform but also on
the load carried by the robot.
The table below summarizes the result of these measures:
a/b/c cycle
[mm]
Payload
[gram]
Cycle time
[s]
10/60/10 10 0.250
10/60/10 20 0.300
10/60/10 30 0.500
10/60/10 40 1.000
øD
h
b
ca

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 17/36
2.3.3. Repeatability
The pose repeatability and the multi-directional pose accuracy variation have been measured
as presented in the International Standard (ISO 9283).
2.3.3.1. Pose repeatability
Pose repeatability expresses the closeness of agreement between the attained poses after n
repeat visits to the same command pose in the same direction.
The repeatability of the pocket delta robot is of + 2.5µm
NOTE
The “3σ” mention means that in 99.73% of the cases, the robot repeatability at the point Pi
will be at least equal to the value in the table above.
2.3.4. Force capability
The robot PocketDelta force capability
strongly depends on the point of
application. Thus, we can define three
regions :
(1) Centered in the middle of the workspace ;
(2) Intermediary position;
(3) In the extremity of the workspace.
The general behavior of the force applied
by the gripper is shown on the Figure 2-8
And the associated numerical value are
summarized in the table below :
PocketDelta 150
Application
place
F1
[N]
F2
[N]
Δs
[s]
(1) 4 2.5 1.75
(2) 3.75 2.25 1.5
(3) 3.5 2 1.5
Figure 2-7 : Disposition of the force application
place in the robot workspace
Figure 2-8 : PocketDelta Robot force
x
y
Motor shaft 1
(1)
(2)
(3)
Δs
Time [s]
Force [N]
F1
F2

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 18/36
PocketDelta 100
Application
place
F1
[N]
F2
[N]
Δs
[s]
(1) 5 2.75 2
(2) 4.5 2.5 1.5
(3) 4.5 2.5 1.5
NOTE :
These data correspond to the minimum
achievable forces. It can vary depending
on the height (z) of the point of application
of force.
Figure 2-9 : PocketDelta Robot force
2.4. Electric Interfaces
2.4.1. Overview
All electrical interfaces are located in
the back side of the robot. The
function of the connectors and
indicators are explained on the figure
below.
(A) Power supply
(B) Main switch
(C) IO connector
(D) RJ 45 connector
All these interfaces are described in
detail during the following sections.
Figure 2-10 : Electrical interfaces to the
PocketDelta Robot
Δs
Time [s]
Force [N]
F1
F2
(C)
(D) (B)
(A)

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 19/36
2.4.2. Power connection (A)
The connector plug device is not
delivered with the robot. Its
specifications must be :
Characteristic Value
Description Power Jacks miniatures
Switchcraft
Model on robot
side
712 A
Model on cable
side
760K / S760K
The PocketDelta robot is powered
with 24VDC/4A. These characteristics
are summarized below :
Characteristic Value
Voltage 24V DC
Current 4 A
Figure 2-11 : power supply connector to the
PocketDelta robot (on robot side)
2.4.3. Main stop switch (B)
WARNING !
- Before supplying power to the product, check that your distribution voltage is the same
as the nominal voltage of the robot.
- Never disconnect the power cables. Always turn the machine off and then cut the power
off.
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 20/36
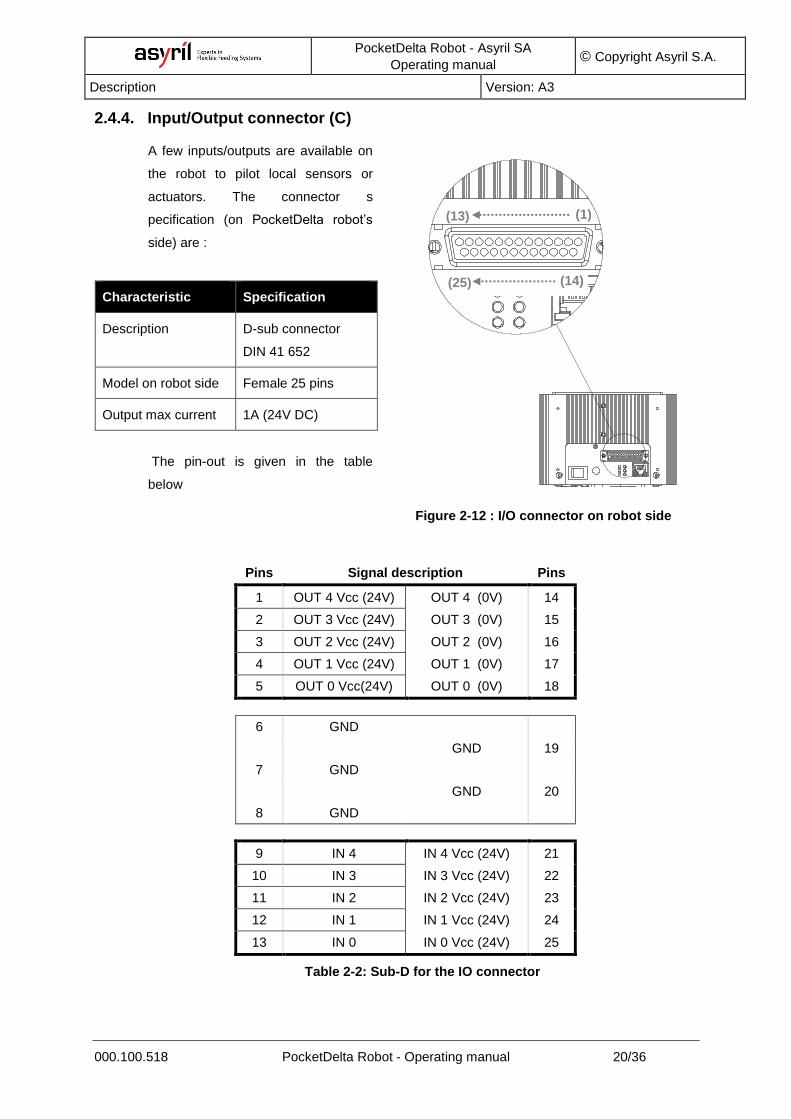
2.4.4. Input/Output connector (C)
A few inputs/outputs are available on
the robot to pilot local sensors or
actuators. The connector s
pecification (on PocketDelta robot’s
side) are :
Characteristic Specification
Description D-sub connector
DIN 41 652
Model on robot side Female 25 pins
Output max current 1A (24V DC)
The pin-out is given in the table
below
Figure 2-12 : I/O connector on robot side
Pins Signal description Pins
1 OUT 4 Vcc (24V) OUT 4 (0V) 14
2 OUT 3 Vcc (24V) OUT 3 (0V) 15
3 OUT 2 Vcc (24V) OUT 2 (0V) 16
4 OUT 1 Vcc (24V) OUT 1 (0V) 17
5 OUT 0 Vcc(24V) OUT 0 (0V) 18
6 GND
GND 19
7 GND
GND 20
8 GND
9 IN 4 IN 4 Vcc (24V) 21
10 IN 3 IN 3 Vcc (24V) 22
11 IN 2 IN 2 Vcc (24V) 23
12 IN 1 IN 1 Vcc (24V) 24
13 IN 0 IN 0 Vcc (24V) 25
Table 2-2: Sub-D for the IO connector
(13) (1)
(25) (14)
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 21/36
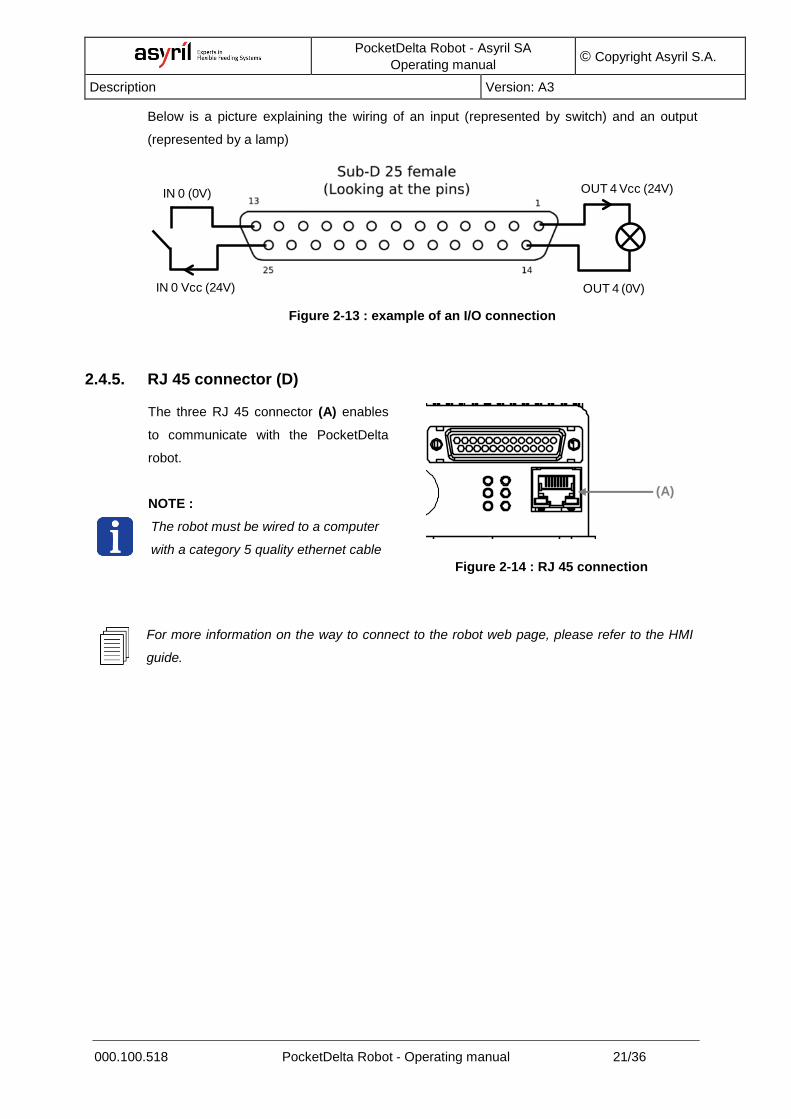
Below is a picture explaining the wiring of an input (represented by switch) and an output
(represented by a lamp)
Figure 2-13 : example of an I/O connection
2.4.5. RJ 45 connector (D)
The three RJ 45 connector (A) enables
to communicate with the PocketDelta
robot.
NOTE :
The robot must be wired to a computer
with a category 5 quality ethernet cable
Figure 2-14 : RJ 45 connection
For more information on the way to connect to the robot web page, please refer to the HMI
guide.
OUT 4 Vcc (24V)
OUT 4 (0V)
IN 0 (0V)
IN 0 Vcc (24V)
(A)

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 22/36
2.5. Mechanical Interfaces
2.5.1. Attachment of the robot
The robot can be used on its original legs or integrated in a mechanical setup using the base
plate to attach it mechanically.
Figure 2-15 : Attachment of the PocketDelta robot
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 23/36
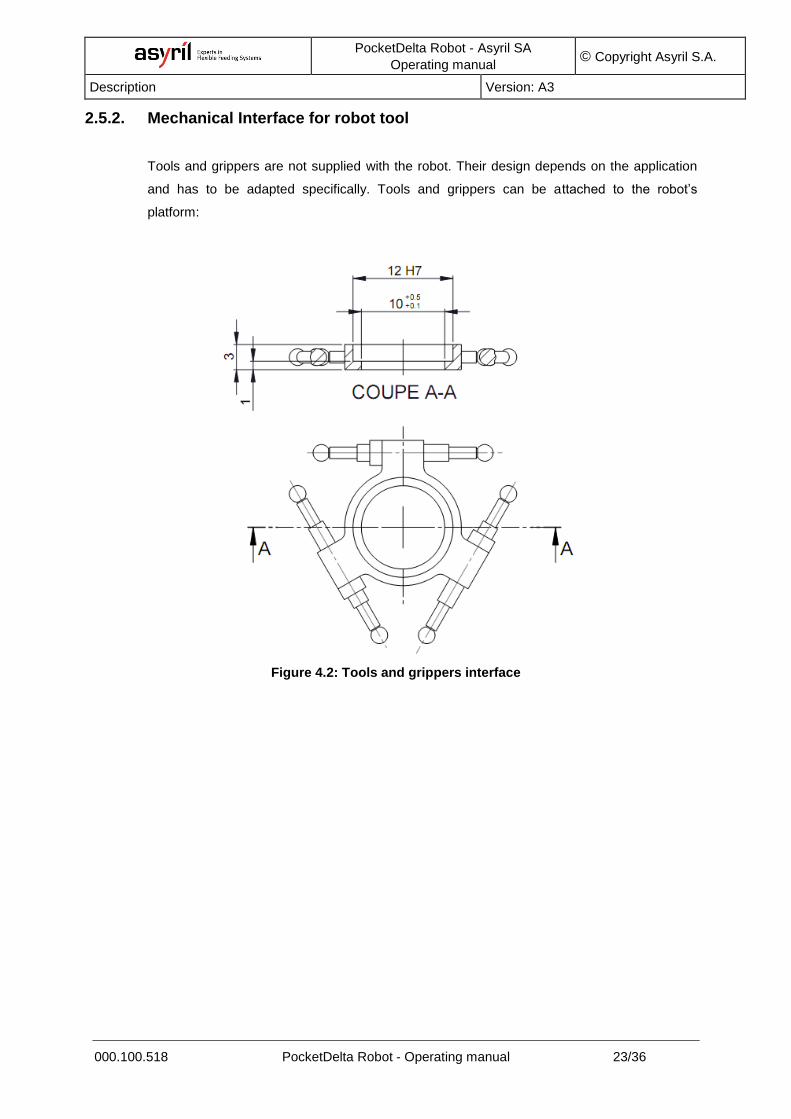
2.5.2. Mechanical Interface for robot tool
Tools and grippers are not supplied with the robot. Their design depends on the application
and has to be adapted specifically. Tools and grippers can be attached to the robot’s
platform:
Figure 4.2: Tools and grippers interface

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Description Version: A3
000.100.518 PocketDelta Robot - Operating manual 24/36
2.6. Accessories and optional modules
2.6.1. Vision-kit
If the option was purchased a specific
mirror (A) is mounted under the
PocketDelta robot control box. Its
specific dimensions are given in the
following table :
Characteristics Value
Length 36 mm
Width 34 mm
Angle 20°
Thickness 5 mm
Figure 2-16 : PocketDelta robot with mirror
For more information on the mirror cleaning, please refer to section 4.3.3 “Optical parts
cleaning” on page 31.
2.6.2. Embedded vertical compliance module
If the option was purchased, the compliance is supplied with the robot, mounted on the robot
platform.
Figure 2-17 : Compliance module
(A)
9.5

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Transportation, handling and installation Version: A3
000.100.518 PocketDelta Robot - Operating manual 25/36
3. Transportation, handling and installation
3.1. Packaging of the product, transportation and handling
The transportation of the product must be made in accordance with the specific terms
indicated on the package (top, bottom and fragile …). In addition, pay particular attention to
the following points :
WARNING !
- Be aware of the weight and take care when transporting the system.
- Always hold the system firmly with two hands on the side bars.
- The operator should not carry heavy shipping boxes by himself.
- If the shipping box is to be left standing, it should be in a horizontal position.
- Do not climb on the shipping box.
- Do not place heavy objects, on top of the shipping box.
The PocketDelta robot is shipped in a cardboard of the following dimensions :
Value
Dimensions l*L*H 23*23*40
Gross weight 6 kg
Table 3-1 : gross weight and dimensions of the product when packaged
3.2. Before unpacking
Before unpacking, look at the ShockWatch Label. As to promote zero-defect shipping, all
Asyril products are shipped with a ShockWatch Label. If this is red, or if any evidence of
damage during transit was to be indicated please :
(A) request that the carrier’s agent be present at the time of
unpacking.
(B) pay special attention to any damage on the exteriors of the product
(C) If any damage has occurred, do not sign the delivery recipit and
contact Asyril
(D) In every cases, make a notation on the delivery recipit
Figure 3-1 : ShockWatch
NOTE :
If the items received do not match to your order, or are damaged, do not sign the receipt,
and contact Asyril as soon as possible.
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Transportation, handling and installation Version: A3
000.100.518 PocketDelta Robot - Operating manual 26/36
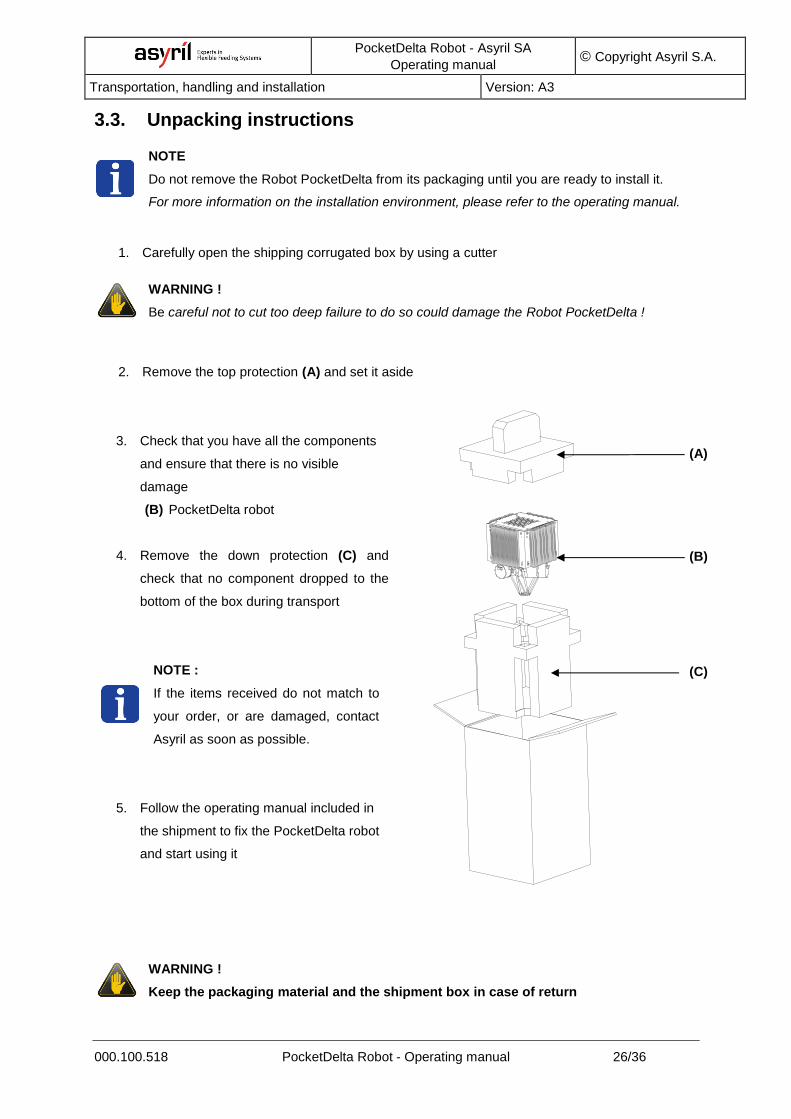
3.3. Unpacking instructions
NOTE
Do not remove the Robot PocketDelta from its packaging until you are ready to install it.
For more information on the installation environment, please refer to the operating manual.
1. Carefully open the shipping corrugated box by using a cutter
WARNING !
Be careful not to cut too deep failure to do so could damage the Robot PocketDelta !
2. Remove the top protection (A) and set it aside
3. Check that you have all the components
and ensure that there is no visible
damage
(B) PocketDelta robot
4. Remove the down protection (C) and
check that no component dropped to the
bottom of the box during transport
NOTE :
If the items received do not match to
your order, or are damaged, contact
Asyril as soon as possible.
5. Follow the operating manual included in
the shipment to fix the PocketDelta robot
and start using it
WARNING !
Keep the packaging material and the shipment box in case of return
(C)
(A)
(B)

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Transportation, handling and installation Version: A3
000.100.518 PocketDelta Robot - Operating manual 27/36
Locate the identification plate at the
back of the product and ensure that
the product you have received is the
appropriate one.
Important information is on this plate;
such as the power consumption or
the serial number that you will need
for any kind of correspondence with
Asyril.
Figure 3-2 : Product key sticker
The product key gives the product designation as follows:
PRODU - TYP - VE - - AA - BB - CC - DD
Product
ROBOT – Robot Delta
Type
POC - Pocket POW - Power DES - Desktop
Version
01 - Version number AA - Customized
Workspace ø
10 - ø100mm 15 - ø150mm
Axes
03 - 3 axes (x,y,z)
Mount
01- floor with legs 02 - Roof without legs
Option
01- Standard
Figure 3-3 : product key
ASYRIL SA - Switzerland
www.asyril.ch
Article n° : X xxx xxx xxx
Type : PRODU-TYP-VE--AA-BB-CC-DD
Input Voltage : 24VDC
Serial n°: xxxxxxx
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Transportation, handling and installation Version: A3
000.100.518 PocketDelta Robot - Operating manual 28/36
3.4. Installation and storage environment
WARNING !
The Robot PocketDelta must be mounted on a smooth, flat and strong surface. Ensure
yourself that the Robot PocketDelta is not submitted to excessive vibration or mounting
flexure. Failure to do so would degrade feeder performance.
3.4.1. Installation environment
The PocketDelta robot can be used under following conditions:
- Working temperature: +5°C to +40°C
WARNING !
note that variations of temperature might affect the precision of the robot, especially if
precisions below 10 microns are necessary
- Humidity: 30% to 80% max. non-condensing
WARNING !
In the case of extreme humidity, note that it might affect the global performances of the
cell.
- Avoid extreme electromagnetic waves, ultraviolet rays and radiation.
- Avoid using the product in a place where the main unit or controller may be exposed to
water or oil droplets.
- Clean room application: cleanliness class ISO7 and ISO8
WARNING !
Do not use the product in an atmosphere of corrosive gases. Rust may form and reduce
the structural strength of the product.
3.4.2. Storage environment
The storage environment should be similar to the operating environment. In addition, you
should protect the PocketDelta robot against dust
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Maintenance and reparation Version: A3
000.100.518 PocketDelta Robot - Operating manual 29/36
4. Maintenance and reparation
4.1. Safety precautions
4.1.1. General safety precautions
WARNING !
There are no user serviceable parts inside the product. Contact a supplier to effect
maintenance. In cases of non respectation, the product guarantee will expire.
DANGER !
Do not operate the system when it is damaged. Please ensure yourself before use
that now defects are to be noticed.
DANGER !
Power down the system and unplug it from the mains before any kind of
maintenance.
DANGER !
Do not pour water onto the product. Spraying water over the product, washing it
with water or using it in water may cause the product to malfunction, resulting in
injury, electric shock, fire, etc.
4.1.2. Specific warnings
WARNING !
Be sure that the robot’s platform is unloaded before any kind of maintenance.
4.2. Personnel responsible for maintenance or reparation
Maintenance operation must be done by personnel who has a working knowlage of the
system, nevertheless, we can define three kind of staff :
(A) Maintenance technician without any specific formation from Asyril
(B) Maintenance technician with a specific formation from Asyril
(C) Technician from Asyril’s customer service
Make sure that the person who will be working on the maintenance has received and read
this manual, and will be able to work in the manner specified in the following sections. All
personnel must observe the safety precautions listed in this manual.
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Maintenance and reparation Version: A3
000.100.518 PocketDelta Robot - Operating manual 30/36
4.3. Maintenance
WARNING !
For any kind of maintenance, always use Asyril products.
4.3.1. Periodic maintenance schedule
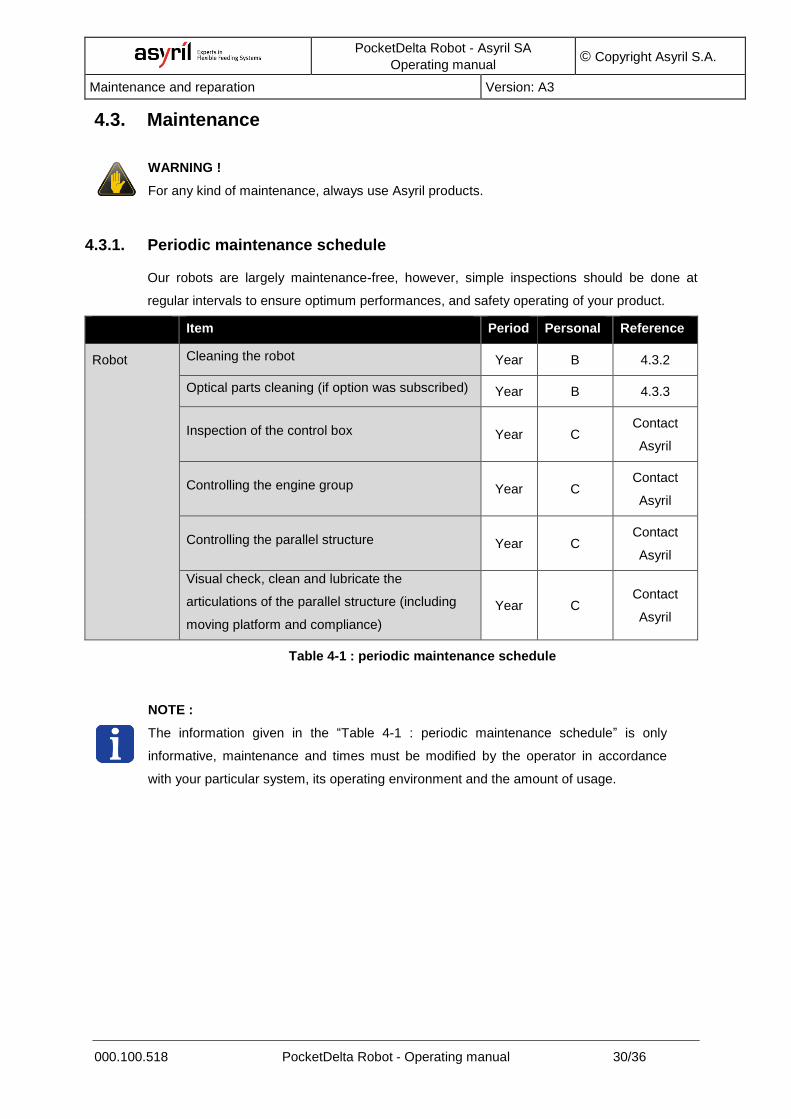
Our robots are largely maintenance-free, however, simple inspections should be done at
regular intervals to ensure optimum performances, and safety operating of your product.
Item Period Personal Reference
Robot Cleaning the robot Year B 4.3.2
Optical parts cleaning (if option was subscribed) Year B 4.3.3
Inspection of the control box Year C Contact
Asyril
Controlling the engine group Year C Contact
Asyril
Controlling the parallel structure Year C Contact
Asyril
Visual check, clean and lubricate the
articulations of the parallel structure (including
moving platform and compliance)
Year C Contact
Asyril
Table 4-1 : periodic maintenance schedule
NOTE :
The information given in the “Table 4-1 : periodic maintenance schedule” is only
informative, maintenance and times must be modified by the operator in accordance
with your particular system, its operating environment and the amount of usage.
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Maintenance and reparation Version: A3
000.100.518 PocketDelta Robot - Operating manual 31/36
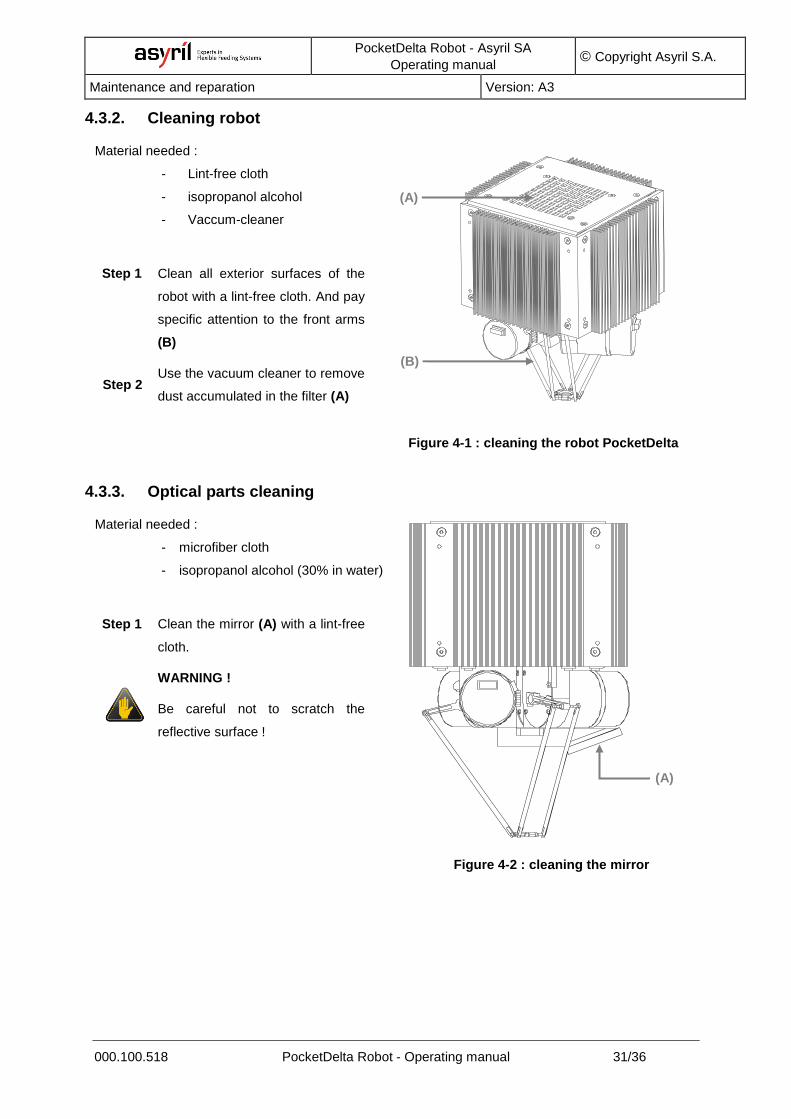
4.3.2. Cleaning robot
Material needed :
- Lint-free cloth
- isopropanol alcohol
- Vaccum-cleaner
Step 1 Clean all exterior surfaces of the
robot with a lint-free cloth. And pay
specific attention to the front arms
(B)
Step 2 Use the vacuum cleaner to remove
dust accumulated in the filter (A)
Figure 4-1 : cleaning the robot PocketDelta
4.3.3. Optical parts cleaning
Material needed :
- microfiber cloth
- isopropanol alcohol (30% in water)
Step 1 Clean the mirror (A) with a lint-free
cloth.
WARNING !
Be careful not to scratch the
reflective surface !
Figure 4-2 : cleaning the mirror
(A)
(B)
(A)

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Maintenance and reparation Version: A3
000.100.518 PocketDelta Robot - Operating manual 32/36
4.3.4. Controlling the parallel structure
- Clean and lubricate the joints of the parallel structure
- Control the front arms wear
- Control the clearance of the robot platform
NOTE :
This maintenance operation can only be performed by a Asyril technician.
For more information on this operation, please contact Asyril customer’s service.
4.3.5. Controlling the engine group
- Control the engine
- Control the brakes
NOTE :
This maintenance operation can only be performed by a Asyril technician.
For more information on this operation, please contact Asyril customer’s service.
4.3.6. Inspection of the control box
- Clean the air filter
NOTE :
This maintenance operation can only be performed by a Asyril technician.
For more information on this operation, please contact Asyril customer’s service.

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Version: A3
000.100.518 PocketDelta Robot - Operating manual 33/36
4.4. Reparation
This section gives a list of the replaceable parts in the system with their product key. The
product must be returned to the manufacturer for any repair work. For exceptional cases, and
after acceptation of Asyril S.A. this work can be performed on the costumer’s site by trained
personnel as defined in section 4.2.
WARNING !
For any kind of reparation, always use Asyril products.
Two kind of parts are defined :
(A) Part way that may be changed every year (wear part)
(B) Part way that may be changed every 5 years
Name of the part Type Product key Article
number
Robot platform A Y 660 830 094
Arm 150 A Y 660 830 102
Front-arm 150 A Y 420 830 330
Foam filter plate B Y 160 830 002
Table 4-2 : Replaceable parts for PocketDelta Robot
NOTE :
For more information on the spare parts and delivery time, please contact Asyril
costumer’s service.
IMORTANT NOTE :
The front arms are wear parts that may be changed every years in the case of a normal
use (8 hours per day and 45 weeks a year)
PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Version: A3
000.100.518 PocketDelta Robot - Operating manual 34/36
4.5. Technical support
4.5.1. For better service …
You have read the check list and the related manuals without finding answers to your
questions ? Before calling the support service, note the following information for your system:
- serial number and product key of your material
- software version
- alarm or error message displayed on the screen
4.5.2. Contact
You can find lot of information on our website : www.asyril.com
You can also contact us by mail or call our support service :
+41 26 653 71 90

PocketDelta Robot - Asyril SA
Operating manual © Copyright Asyril S.A.
Version: A3
000.100.518 PocketDelta Robot - Operating manual 35/36
Review history
Rev. Date Author Comments
A 14.07.09 PeS Initial Version
A1 26.09.12 SiA Update to new model add maintenance, transport, and
unpacking information.
A2 15.10.12 SiA Update replaceable part list
A3 13.02.13 SiA Update Height on foot (§ 2.2.2)

This document is the property of Asyril S.A. and may not be copied or circulated without
permission. The information contained in this document is subject to change without notice for
the purpose of product improvement.
asyril sa
z.i. le vivier 22
ch-1690 villaz-st-pierre
switzerland
tel. +41 26 653 71 90
fax +41 26 653 71 91
www.asyril.com








![Sport Utility Vehicle...Rated output1 (kW [HP] at rpm) XXX XXX XXX XXX XXX Acceleration from 0 to 100 km/h (s) XXX XXX XXX XXX XXX Top speed (km/h) XXX 3XXX XXX 3XXX XXX3 Fuel consumption4](https://img.pdfslide.us/doc/110x75/5e9ad03bae36bf4b5c045c78/sport-utility-vehicle-rated-output1-kw-hp-at-rpm-xxx-xxx-xxx-xxx-xxx-acceleration.jpg)




















