-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
1/18
Playing games with the development of
machine vision algorithms using ViPER
Presented by:
Benjamin WheelerNAVAL SURFACE WARFARE CENTER DAHLGREN
DIVISION
UNMANNED AND ROBOTIC SYSTEMS INTEGRATION BRANCH (G82)
540.653.6030 (office phone)
540.642.2973 (mobile phone)
[email protected]
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
2/18
Introduction to Concept, and Motivation Dev. of machine vision
for UxS is often dependent on data from real systems.
This work investigates the use of virtual environments to create
synthetic datato feed perception system algorithms in robotic
systems.
Background and Virtual Prototyping Utilization of open source,
freeware, and govt owned simulation tools.
Demonstrates integration with existing machine vision code used
in the
SUMET UGV program (Office of Naval Research Code 30).
Experiment Design and Setup Built a real and virtual experiment
setup to generate stereo disparity images.
Compared real and synthetic imagery.
Results and Application Created stereo disparity images with an
average disparity difference of 3.5
pixels between real and synthetic data for 656x492 pixel
images.
Use of simulation can be effective when the world is
sufficiently modeled.
OUTLINE: What are we talking about?
Utilizing M&S for computer vision
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
3/18
INTRO to CONCEPT: Virtual imagery for dev. of machine vision for
UxS
Current development of machine vision for UxS is highly
dependent on access to the platform and real data. Size and
complexity of UxS systems is ever increasing.
Test and development of algorithms for these systems is a
technical and
resource challenge due to the multi-disciplinary nature and
complexity of
current state-of-the-art robotic systems.
Progress is often bottlenecked by resource limitations,making
synthetic data an attractive alternative. A simulated system would
reduce resource requirements, speed
development time, and lower overall development cost.
However, it is difficult to correlate the true benefit of this
approach, and the
ease at which high-fidelity simulated data may be created.
To test feasibility, using a real UxS perception system, we
attempted to create identical real and virtual data sets
Limited resources bottleneck development
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
4/18
ViPER enables software-in-the-loop dev.
The ViPER simulation was created under the SAF-T program
by ONR, to create a new paradigm in fire-control for RWS.
It was designed to integrate with Software-in-the-Loop
capability, and implements a preliminary design of the
autonomous target detection, integrated with a Linux-based
embedded system implementing semi-autonomous fire control.
In Sept. 2013, the initial baseline of ViPER for SAF-T was
usedto conduct a user experiment to compare human performance
differences between tele-operated and semi-autonomous fire-
control modalities.
V i P E R
ViRT
UALPROTOTYPINGENVIRONMENTforROBOTICS
INTRO to CONCEPT: Virtual Prototyping Environment for Robotics
(ViPER)
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
5/18
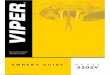
This work demonstrates the abili ty to create near identical
disparity maps using an existing UGV perception system.
Real Imagery Synthetic Imagery
Average of 3.5 pixel difference per dispari ty calculation
INTRO to CONCEPT: Virtual imagery for dev. of machine vision for
UxS
Investigate use of fake imagery for real algo.
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
6/18
Serious Gaming is a focus area for training and system dev.,
often
leveraging the commercial gaming industry Examples include: VBS
II, DSTS, OneSAF, Army Gaming Studio,
Delta3D,
Dev. examples include: RIVET, MODSIM (FCS), EODRS,
Many open-source, freeware, and low-cost game engines have
beendeveloped for aspiring game creators
For warfighter-centric systems, todays games share many of
the
features necessary for rapid virtual prototyping and virtual
demonstration of user-intensive systems.
Real-enough physics make interaction with the world
believable
High fidelity graphics create an immersive environment for
free
Easy to manipulate game environments enable creation of
tailor-made
experiments, and the ability to rapidly test different system
designs.
VIRTUAL PROTOTYPING: Why use a video game?
Allows creation of system-in-a-box
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
7/18
Utilize M&S to perform RWS vs.
supervised autonomous RWS (saRWS)experiments to generate
requirements and
inform system design
In simulated world, information is known a-priori, allowing
precise modeling of varying
levels of object detection, and creation of
training and test data.
Algorithms transition into ROS from
simulation, allowing concurrent
development of the real system
Record MoEs to generate KPPs
VIRTUAL PROTOTYPING:Why use a video game?
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
8/18
BACKGROUND: UGV Perception SystemsSUMET and ROS Small Unity
Mobility Enhancement Technologies (SUMET)
developed an advanced perception system (APS) forunmanned ground
vehicle based on stereo perception algorithms.
The SUMET system is implemented in the Robotic Operating
System
(ROS). ROS is a meta-operating system enabling effective
integration of re-use of software elements common to robotic
systems.
Autonomous off-road navigation
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
9/18
Auto ID,
track & fire-
solution- but -
Operator
decides to
engage
Purpose of SAF-T Weaponization of unmanned systems,
and increase effectiveness of RWS
Autonomously identify, track, and
computes firing solutions for targets
Improved use of RWS requires a new C2 paradigm Systems suffer
from limited SA and latency.
Technologies such as shot detection provide
recognized value-added to the warfighter.
Simulation-based approach used to defineparameters of desired
future system Leveraging commercial video game
software and existing tools
Focus on Warfighter-System interaction
Shoot more stuff, faster, using a computer
BACKGROUND: Advanced Target Detection and Tracking
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
10/18
Unity3D
Unity3D is a video game engine developed by Unity
Technologies,providing a convenient content-oriented editor.
Freeware and low-cost licensing options are available.
Unity3D is being using by the Supervised Autonomous Fires
Technology (SAF-T)
program to virtually prototyped an unmanned weapons system, and
through this
effort has integrated ROS with Unity3D.
Related Works Virtual Environments for Cognitive Architecture
Development (VECAD - ONR)
Robotics Interactive Visualization and Experimentation Toolkit
(RIVET - GDRS)
BACKGROUND: Tools and Related Works
Leverage open source and freeware
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
11/18
EXPERIMENT DESIGN & SETUP
Created test-board in the lab, and virtual world within
Unity3D using the Unity Editor. Created textures for the virtual
world with still photographs of the real scene.
Created real and virtual world
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
12/18
12
EXPERIMENT DESIGN & SETUP
Created test-board in the lab, and virtual world within
Unity3D using the Unity Editor. Cameras implemented using 115mm
baseline, with FOV matching the real
system, with resolution of 656x492 pixels, and 3.5mm (68.82
degree FOV)
Stereo calibration parameters were shared between real and
virtual system.
Created real and virtual world
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
13/18
EXPERIMENT DESIGN & SETUP
Real and Simulated Systems run the same ROS code to
calculate stereo disparity from imagery Real system uses imagery
generated by the stereo camera system Simulated system used imagery
generated by the Unity3D simulation
Unity3D communicates to the ROS system via a custom ROS driver
node that
communicates via the RTP protocol using a UDP Client / Server
relationship.
Real orVirtual
cameras
produce the
same ROS
Topics
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
14/18
Real and Simulated Systems run the same ROS code to
calculate stereo disparity from imagery
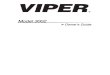
RESULTS & CONCLUSIONS
Real System Synthetic SystemDisparity Difference
Disparity Map
Temporal di ff. over 100
images [1.2 per pixel]
Temporal di ff. over 100
images [~ 0 per pixel]
Disparity MapAverage di ff. over 100
images [3.5 per pixel]
Std. dev. diff. over 100
images [.006 per pixel]
Uncharacterized noise in real-world data
ImageResolu
tion=656x492
pixels:322752
totalpixelsinim
age
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
15/18
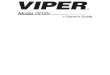
See notes for sl ide explanation
ViPER acts as a synthetic sensor
APPLICATION: ViPER usage in the SAF-T program
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
16/18
Warfighter Workshops Used simulator to motivatetalks with Marine
RWS operators.
Marines played simulator in TO
and SA mode, commentedon concept and design,
informing algorithm requirements
User-based Experimentation
IRB protocol for participants to play scenario in TO and SA
mode. Recording overall measures of performance at di fferent error
levels
to determine necessary false posit ive and false negative rates
of the
detection and tracking pipeline to maintain system capabil
ity
APPLICATION: ViPER usage in the SAF-T Program
Inform system level design requirements
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
17/18
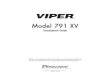
APPLICATION: ViPER usage in the SAF-T Program
Generate synthetic data for algorithm dev.
-
8/9/2019 Playing games with the development of machine vision
algorithms using ViPER
18/18
QUESTIONS:What else would you like to know?
Playing games with the development of
machine vision algorithms using ViPER
Presented by:
Benjamin Wheeler540.653.6030 (office phone)
540.642.2973 (mobile phone)
[email protected]