Embed Size (px)
DESCRIPTION
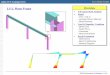
first we develop stiffness matrix for beam, then include axial nodal displacement degree of freedom and combine to form stiffness matrix.
Citation preview

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 181
Plane Frame and Grid Equations
Introduction
Many structures, such as buildings and bridges, are composed of frames and/or grids. This chapter develops the equations and methods for solution of plane frames and grids. First, we will develop the stiffness matrix for a beam element arbitrarily oriented in a plane. We will then include the axial nodal displacement degree of freedom in the local beam element stiffness matrix. Then we will combine these results to develop the stiffness matrix, including axial deformation effects, for an arbitrarily oriented beam element. We will also consider frames with inclined or skewed supports.
Two-Dimensional Arbitrarily Oriented Beam Element
We can derive the stiffness matrix for an arbitrarily oriented beam element, shown in the figure below, in a manner similar to that used for the bar element. The local axes x and y are located along the beam element and transverse to the beam element, respectively, and the global axes x and y are located to be convenient for the total structure.
The transformation from local displacements to global displacements is given in matrix form as:

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 182
θθ
sincos
ˆˆ
==
−
=
SC
dd
CSSC
dd
y
x
y
x
Using the second equation for the beam element, we can relate local nodal degrees of freedom to global degree of freedom:
1
1 1
1 1
22
22
2
ˆ 0 0 0 0ˆ 0 0 1 0 0 0 ˆ
ˆ 0 0 0 00 0 0 0 0 1ˆ
φ φ
φφ
− = = − + −
X
y y
y x yXy
y
dd dS C
d Sd CddS Cdd
For a beam we will define the following as the transformation matrix:
−
−
=
10000000000001000000
CS
CS
T
Notice that the rotations are not affected by the orientation of the beam. Substituting the above transformation into the general form of the stiffness matrix
TkTk T ˆ= gives:
Let’s know consider the effects of an axial force in the general beam transformation.
2 2
2 2
2 2
3 2 2
2 2
2 2
12 12 6 12 12 612 12 6 12 12 66 6 4 6 6 212 12 6 12 12 6
12 12 6 12 12 66 6 2 6 6 4
− − − − − − − −
= − −
− − − − − −
S SC LS S SC LSSC C LC SC C LCLS LC L LS LC LEIk
L S SC LS S SC LSSC C LC SC C LCLS LC L LS LC L

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 183
Recall the simple axial deformation, define in the spring element:
−−
=
x
x
x
x
dd
LAE
ff
2
1
2
1
ˆˆ
11
11
ˆˆ
Combining the axial effects with the shear force and bending moment effects, in local coordinates, gives:
where
321 LEIC
LAEC ==
11 1 1
11 2 2 2 22 2
1 2 2 2 2 1
1 1 22
2 2 2 222 2 2
2 2 2 22 2
ˆˆ 0 0 0 0ˆˆ 0 12 6 0 12 6ˆˆ 0 6 4 0 6 2
ˆ ˆ0 0 0 00 12 6 0 12 6 ˆˆ0 6 2 0 6 4ˆ ˆ
φ
φ
− − − = − − − −
−
xx
xy
xx
yy
df C Cdf C LC C LC
m LC C L LC C LC C df
C LC C LC dfLC C L LC C Lm

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 184
Therefore:
−−−−
−−−
−
=
222
222
2222
11
222
222
2222
11
460260612061200000
26046061206120
0000
ˆ
LCLCLCLCLCCLCC
CCLCLCLCLC
LCCLCCCC
k
The above stiffness matrix include the effects of axial force in the x direction, shear force in the y , and bending moment about the z axis. The local degrees of freedom may be related to the global degrees of freedom by:
−
−
=
2
2
2
1
1
1
2
2
2
1
1
1
1000000000000000010000000000
ˆˆˆˆˆˆ
φ
φ
φ
φ
y
x
x
x
y
x
x
x
dd
dd
CSSC
CSSC
dd
dd
where the transformation matrix, including axial effects is:
−
−
=
1000000000000000010000000000
CSSC
CSSC
T

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 185
Substituting the above transformation into the general form of the stiffness matrix TkTk T ˆ= gives:
The analysis of a rigid plane frame can be undertaken by applying stiffness matrix. A rigid plane frame is defined here as a series of beam elements rigidly connected to each other; that is, the original angles made between elements at their joints remain unchanged after the deformation. Furthermore, moments are transmitted from one element to another at the joints. Hence, moment continuity exists at the rigid joints. In addition, the element centroids, as well as the applied loads, lie in a common plane. We observe that the element stiffnesses of a frame are functions of E, A, L, I, and the angle of orientation θ of the element with respect to the global-coordinate axes.
EkL
=

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 186
Rigid Plane Frame Example
Consider the frame shown in the figure below.
The frame is fixed at nodes 1 and 4 and subjected to a positive horizontal force of 10,000 lb applied at node 2 and to a positive moment of 5,000 lb-in. applied at node 3. Let E = 30 x 106 psi and A = 10 in.2 for all elements, and let I = 200 in.4 for elements 1 and 3, and I = 100 in.4 for element 2. Element 1: The angle between x and x is 90°
10 == SC where
( )32
22 0.10120
)200(66167.0120
)200(1212 inLIin
LI
====
3
6
/000,250120
1030 inlbLE
=×
=

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 187
Therefore, for element 1:
(1)
1 1 1 2 2 2
0.167 0 10 0.167 0 100 10 0 0 10 010 0 800 10 0 400
250,0000.167 0 10 0.167 0 10
0 10 0 0 10 010 0 400 10 0 800
φ φ
− − − − −
= − −
−
d d d dx y x y
lbk in
Element 2: The angle between x and x is 0°
01 == SC
( )32
22 0.5120
)100(660835.0120
)100(1212 inLIin
LI
====
Therefore, for element 2:
inlbk
yd
xd
yd
xd
−−−
−−
−
=
400502005050835.0050835.00
00100010200504005050835.0050835.0000100010
000,250)2(
333222φφ
Element 3: The angle between x and x is 270°
10 −== SC
( )32
22 0.10120
)200(66167.0120
)200(1212 inLIin
LI
====
3
6
/000,250120
1030 inlbLE
=×
=

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 188
Therefore, for element 3:
inlbk
yd
xd
yd
xd
−−
−−−−
−−
=
80001040001001000100100167.0100167.0
40001080001001000100
100167.0100167.0
000,250)3(
444333φφ
The boundary conditions for this problem are:
0414411 ====== φφyxyx dddd After applying the boundary conditions the global beam equations reduce to:
−−−−
−−
−−
×=
3
3
3
2
2
2
5
12005102005050835.10050835.00
100167.10001020050120051050835.0050835.1000010100167.10
105.2
000,50000000,10
φ
φ
y
x
y
x
dd
dd
Solving the above equations gives:
2
2
2
3
3
3
0.2110.00148
0.001530.209
0.001480.00149
φ
φ
−
= −
−
x
y
x
y
d ind in
radd ind in
rad

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 189
Element 1: The element force-displacement equations can be obtained using dTkf ˆˆ = . Therefore, dT is:
−−
=
−===
===
−
−
=
radinin
radind
ind
dd
dT
y
x
y
x
00153.0211.0
00148.0000
00153.000148.0
211.0000
100000001000010000000100000001000010
2
2
2
1
1
1
φ
φ
Recall the elemental stiffness matrix is:
−−−−
−−−
−
=
222
222
2222
11
222
222
2222
11
460260612061200000
26046061206120
0000
ˆ
LCLCLCLCLCCLCC
CCLCLCLCLC
LCCLCCCC
k
Therefore, the local force-displacement equations are:
−−
−−−−
−−
−−
×==
radinin
dTkf
00153.0211.0
00148.0000
80010040010010167.0010167.00
10010001040010080010010167.0010167.0000100010
105.2ˆˆ 5)1(
Simplifying the above equations gives:
⋅−
⋅
−
=
inklblbinklblb
mffmff
y
x
y
x
223990,4700,3
376990,4700,3
ˆ
ˆˆˆ
ˆˆ
2
2
2
1
1
1

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 190
Element 2: The element force-displacement equations are:
−−
−
−
=
−=−==
−===
=
radinin
radinin
radind
indradind
ind
dT
y
x
y
x
00149.000148.0
209.000153.0
00148.0211.0
00149.000148.0209.0
00153.000148.0
211.0
100000010000001000000100000010000001
3
3
3
2
2
2
φ
φ
Therefore, the local force-displacement equations are:
−−
−
−−−−
−−
−−
×==
radinin
radinin
dTkf
00149.000148.0
209.000153.0
00148.0211.0
400502005050833.0050833.00
00100010200504005050833.0050833.0000100010
105.2ˆˆ 5)2(
Simplifying the above equations gives:
⋅−
−⋅−
−
=
inklblbinklblb
mffmff
y
x
y
x
221700,3010,5
223700,3010,5
ˆ
ˆˆˆ
ˆˆ
3
3
3
2
2
2
Element 3: The element force-displacement equations are:
−=
===
−=−==
−
−
=
000
00149.0209.0
00148.0
000
00149.000148.0209.0
100000001000010000000100000001000010
4
4
4
3
3
3
radin
in
dd
radind
ind
dT
y
x
y
x
φ
φ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 191
Therefore, the local force-displacement equations are:
−
−−−−
−−
−−
×==
000
00149.0209.0
00148.0
80010040010010167.0010167.00
10010001040010080010010167.0010167.0000100010
105.2ˆˆ 5)3( radin
in
dTkf
Simplifying the above equations gives:
⋅−−
⋅=
inklblbinklblb
mffmff
y
x
y
x
375010,5700,3
226010,5700,3
ˆ
ˆˆˆ
ˆˆ
4
4
4
3
3
3
Rigid Plane Frame Example
Consider the frame shown in the figure below.
The frame is fixed at nodes 1 and 3 and subjected to a positive distributed load of 1,000 lb/ft applied along element 2. Let E = 30 x 106 psi and A = 100 in.2 for all elements, and let I = 1,000 in.4 for all elements.

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 192
First we need to replace the distributed load with a set of equivalent nodal forces and moments acting at nodes 2 and 3. For a beam with both end fixed, subjected to a uniform distributed load, w, the nodal forces and moments are:
kwLff yy 202
40)000,1(232 −=−=−==
inkftlbwLmm ⋅=⋅−=−=−=−= 600,133,13312
40)000,1(12
22
32
If we consider only the parts of the stiffness matrix associated with the three degrees of freedom at node 2, we get: Element 1: The angle between x and x is 45º
707.0707.0 == SC where
( )3
222
36
78551.1123012)000,1(66
0463.023012)000,1(1212/93.58
5091030
inLI
inL
IinlbLE
=×
=
=×
==×
=
Therefore, for element 1:
−−=400033.833.8
33.802.5098.4933.898.4902.50
93.58)1(
222
k
dd yx φ
Simplifying the above equation:
2 2 2
(1)
2,948 2,945 4912,945 2,948 491491 491 235,700
φ
= − −
x yd d
k

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 193
Element 2: The angle between x and x is 0°
01 == SC where
( )3
222
36
5.124012
)000,1(66
0521.04012
)000,1(1212/5.62480
1030
inLI
inL
IinlbLE
=×
=
=×
==×
=
Therefore, for element 2:
inlbk
dd yx
=
000,45.1205.12052.00
0010050.62)2(
222 φ
Simplifying the above equation:
inlbk
dd yx
=
000,25025.781025.78125.30
00250,6)2(
222 φ
The global beam equations reduce to:
=
⋅−−
2
2
2
700,485290491290951,2945,2491945,2198,9
600,1200
φy
x
dd
inkk
Solving the above equations gives:
−−=
radin
indd
y
x
0033.00097.0
0033.0
2
2
2
φ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 194
Element 1: The element force-displacement equations can be obtained using dTkf ˆˆ = . Therefore, dT is:
−−−
=
−−
−
−
=
radinin
radin
indT
0033.00092.0
00452.0000
0033.00097.0
0033.0000
1000000707.0707.00000707.0707.00000001000000707.0707.00000707.0707.0
Recall the elemental stiffness matrix is a function of values C1, C2, and L
( ) ink
ink
LEIC
LAEC 2273.0
23012
)000,1(1030893,5230121030)100(
3
6
32
6
1 =×
×===
××
==
Therefore, the local force-displacement equations are:
(1)
5,893 0 10 5,893 0 0 00 2.730 694.8 0 2.730 694.8 0
10 694.8 117,900 0 694.8 117,000 0ˆ ˆ5,893 0 0 5,983 0 0 0.00452
0 2.730 694.8 0 2.730 694.8 0.00920 694.8 117,000 0 694.8 235,800 0.0033
− − −
= = − − − − − −
− −
f kTdin
inrad
Simplifying the above equations gives:
1
1
1
2
2
2
ˆ 26.64ˆ 2.268ˆ 389.1ˆ 26.64
2.268ˆ778.2ˆ
− − ⋅ = −
− ⋅
x
y
x
y
f kf km k in
kfkf
k inm

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 195
Element 2: The element force-displacement equations are:
−−
=
−−
=
000
0033.00097.0
0033.0
000
0033.00097.0
0033.0
100000010000001000000100000010000001
radin
in
radin
in
dT
Recall the elemental stiffness matrix is a function of values C1, C2, and L
( ) ink
ink
LEIC
LAEC 2713.0
4012)000,1(1030250,6
40121030)100(
3
6
32
6
1 =×
×===
××
==
Therefore, the local force-displacement equations are:
(2)
6,250 0 0 6,250 0 0 0.00330 3.25 781.1 0 3.25 781.1 0.00970 781.1 250,000 0 781.1 125,000 0.0033ˆ ˆ
6,250 0 0 6,250 0 0 00 3.25 781.1 0 3.25 781.1 00 781.1 125,000 0 781.1 250,00 0
− − − − − −
= = − − − −
−
inin
radf kTd
Simplifying the above equations gives:
⋅−
−⋅−
−
=
inkkkinkkk
dk
50.41258.263.20
57.83258.263.20
ˆˆ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 196
To obtain the actual element local forces, we must subtract the equivalent nodal forces.
2
2
2
3
3
3
ˆ 20.63 0 20.63ˆ 2.58 20 17.42ˆ 832.57 1600 767.4ˆ 20.63 0 20.63
2.58 20 22.58ˆ412.50 1600 2,013ˆ
− − − ⋅ − ⋅ ⋅ = − = − − −
− ⋅ ⋅ − ⋅
x
y
x
y
f k kf k k km k in k in k in
k kfk k kfk in k in k inm
Rigid Plane Frame Example
Consider the frame shown in the figure below. In this example will illustrate the equivalent joint force replacement method for a frame subjected to a load acting on an element instead of at one of the joints of the structure. Since no distributed loads are present, the point of application of the concentrated load could be treated as an extra joint in the analysis.
This approach has the disadvantage of increasing the total number of joints, as well as the size of the total structure stiffness matrix K. For small structures solved by computer, this does not pose a problem. However, for very large structures, this might reduce the maximum size of the structure that could be analyzed.

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 197
The frame is fixed at nodes 1, 2, and 3 and subjected to a concentrated load of 15 k applied at mid-length of element 1. Let E = 30 x 106 psi, A = 8 in2, and let I = 800 in4 for all elements. Solution Procedure
1. Express the applied load in the element 1 local coordinate system (here x is directed from node 1 to node 4).

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 198
2. Next, determine the equivalent joint forces at each end of element 1, using the table in Appendix D (see figure below).
3. Then transform the equivalent joint forces from the local coordinate
system forces into the global coordinate system forces, using the equation fTf T ˆ= . These global joint forces are shown below.

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 199
4. Then we analyze the structure, using the equivalent joint forces (plus
actual joint forces, if any) in the usual manner. 5. The final internal forces developed at the ends of each element may be
obtained by subtracting Step 2 joint forces from Step 4 joint forces.
Element 1: The angle between x and x is 63.43°
895.0447.0 == SC where
( )2 3
2212 12(800) 6 6(800)0.0334 8.95
44.7 1244.7 12= = = =
××
I Iin inL L
3
6
/9.55127.44
1030 inlbLE
=×
×=
Therefore, for element 1:
(1)
4 4 4
90.0 178 448178 359 244448 244 179,000
φ
= − −
d dx y
k

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 200
Element 2: The angle between x and x is 116.57°
895.0447.0 =−= SC where
( )2 3
2212 12(800) 6 6(800)0.0334 8.95
44.7 1244.7 12= = = =
××
I Iin inL L
3
6
/9.55127.44
1030 inlbLE
=×
×=
Therefore, for element 2:
(2)
4 4 4
90.0 178 448178 359 244448 244 179,000
φ
− = −
d dx y
k
Element 3: The angle between x and x is 0° (The author of your textbook directed the element from node 4 to 3. In general, as we have discussed in class, we usually number the element numerically or from 3 to 4. In this case the angle between x and x is 180°)
6330 101 0 50 /
50 12×
= = = =×
EC S lb inL
( )2 3
2212 12(800) 6 6(800)0.0267 8.0
50 1250 12= = = =
××
I Iin inL L
Therefore, for element 3:
(2)
4 4 4
400 0 00 1.334 4000 400 160,000
φ
=
d dx y
k

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 201
The global beam equations reduce to:
4
4
4
7.5 582 0 8960 0 719 400
900 896 400 518,000 φ
− = − ⋅
x
y
k dd
k in
Solving the above equations gives:
4
4
4
0.01030.0009560.00172φ
− = −
x
y
d ind in
rad
Element 1: The element force-displacement equations can be obtained using dTkf ˆˆ = . Therefore, dT is:
895.0447.0
1000000000000000010000000000
==
−
−
= SC
CSSC
CSSC
T
0.447 0.895 0 0 0 0 0 00.895 0.447 0 0 0 0 0 00 0 1 0 0 0 0 00 0 0 0.447 0.895 0 0.0103 0.003740 0 0 0.895 0.447 0 0.000956 0.009630 0 0 0 0 1 0.00172 0.00172
−
= = − − − − −
Tdin inin in
rad rad

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 202
Recall the elemental stiffness matrix is:
−−−−
−−−
−
=
222
222
2222
11
222
222
2222
11
460260612061200000
26046061206120
0000
ˆ
LCLCLCLCLCCLCC
CCLCLCLCLC
LCCLCCCC
k
( ) ink
ink
LEIC
LAEC 155.0
72.4412)800(10302.447
72.44121030)8(
3
6
32
6
1 =××
===×
×==
Therefore, the local force-displacement equations are:
−
−
−−−−
−−−
−
==
radinin
dTkf
00172.000963.000374.0
000
000,1795.5000490,895.50005.500868.105.500868.10
0044700447490,895.5000000,1795.5000
5.500868.105.500868.100044700447
ˆˆ)1(
Simplifying the above equations gives:
(1)
1.670.88
158ˆ ˆ ˆ1.670.88
311
− − ⋅
= = − − ⋅
kk
k inf kd
kk
k in
To obtain the actual element local forces, we must subtract the equivalent nodal forces.

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 203
1
1
1
4
4
4
ˆ 1.67 3.36 5.03ˆ 0.88 6.71 7.59ˆ 158 900 1,058ˆ 1.67 3.36 1.68
0.88 6.71 5.83ˆ311 900 589ˆ
− − − − ⋅ ⋅ − ⋅ = − = − − −
− ⋅ − ⋅ ⋅
x
y
x
y
f k k kf k k km k in k in k in
k k kfk k kf
k in k in k inm
Element 2: The element force-displacement equations can be obtained using dTkf ˆˆ = . Therefore, dT is:
895.0447.0
1000000000000000010000000000
=−=
−
−
= SC
CSSC
CSSC
T
−
=
−
−
−−−
−−−
=
radinin
radinin
dT
00172.000879.000546.0
000
00172.0000956.0
0103.0000
1000000447.0895.00000895.0447.00000001000000447.0895.00000895.0447.0
Therefore, the local force-displacement equations are:
( ) ink
ink
LEIC
LAEC 155.0
72.4412)800(10302.447
72.44121030)8(
3
6
32
6
1 =××
===×
×==

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 204
−
−−−−
−−−
−
==
radinin
dTkf
00172.000879.000546.0
000
000,1795.5000490,895.50005.500868.105.500868.10
0044700447490,895.5000000,1795.5000
5.500868.105.500868.100044700447
ˆˆ)2(
Simplifying the above equations gives:
(2)
2.440.877
158ˆ ˆ ˆ2.440.877
312
− − ⋅
= = − ⋅
kk
k inf kd
kk
k in
Since there are no applied loads on element 2, there are no equivalent nodal forces to account for. Therefore, the above equations are the final local nodal forces
Element 3: The element force-displacement equations can be obtained using dTkf ˆˆ = . Therefore, dT is:
−
−
=
−
−
=
000
00172.0000956.0
0103.0
000
00172.0000956.0
0103.0
100000010000001000000100000010000001
radinin
radinin
dT

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 205
Therefore, the local force-displacement equations are:
( ) ink
ink
LEIC
LAEC 111.0
5012)800(1030400
50121030)8(
3
6
32
6
1 =×
×===
××
==
−
−
−−−−
−−−
−
==
000
00172.0000956.0
0103.0
000,1604000000,804000400335.10400335.100040000400000,804000000,1604000
400335.10400335.100040000400
ˆˆ)3(
radinin
dTkf
Simplifying the above equations gives:
(3)
4.120.687
275ˆ ˆ ˆ4.120.687
137
− − − ⋅
= = − ⋅
kk
k inf kd
kk
k in
Since there are no applied loads on element 3, there are no equivalent nodal forces to account for. Therefore, the above equations are the final local nodal forces. The free-body diagrams are shown below.

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 206
Rigid Plane Frame Example
Consider the frame shown in the figure below.
The frame is fixed at nodes 2 and 3 and subjected to a concentrated load of 500 kN applied at node 1. For the bar, A = 1 x 10-3 m2, for the beam, A = 2 x 10-3 m2, I = 5 x 10-5 m4, and L = 3 m. Let E = 210 GPa for both elements.
Beam Element 1: The angle between x and x is 0°
01 == SC where
345
252
5
2 103
)105(661067.6)3(
)105(1212 mLIm
LI −
−−
−
=×
=×=×
=
36
6
/10703
10210 mkNLE
×=×
=
Therefore, for element 1:
mkNk
yx dd
×=
20.010.0010.0067.00002
1070 3)1(
111 φ
500 kN

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 207
Bar Element 2: The angle between x and x is 45°
707.0707.0 == SC
where
( )m
kNm
mkNmk
yx dd
×=
−
5.05.05.05.0
24.4/1021010 2623
)2(
11
mkNk
yx dd
×=
354.0354.0354.0354.0
1070 3)2(
11
Assembling the elemental stiffness matrices we obtain the global stiffness matrix
mkNK
×=
20.010.0010.0421.0354.00354.0354.2
1070 3
The global equations are:
×=
−
1
1
13
20.010.0010.0421.0354.00354.0354.2
10700
5000
φy
x
dd
mkNkN
Solving the above equations gives:
−=
radmm
dd
y
x
0113.00225.0
00388.0
1
1
1
φ
Bar Element: The bar element force-displacement equations can be obtained using dTkf ˆˆ = .
−
−=
y
x
y
x
x
x
dddd
SCSC
LAE
ff
3
3
1
1
3
1
0000
1111
ˆˆ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 208
Therefore, the forces in the bar element are:
( ) kNSdCdL
AEf yxx 670ˆ111 −=+=
( ) kNSdCdL
AEf yxx 670ˆ113 =+−=
Beam Element: The beam element force-displacement equations can be obtained using dkf ˆˆˆ = . Since the local axis coincides with the global coordinate system, and the displacements at node 2 are zero. Therefore, the local force-displacement equations are:
32
1
222
222
2222
11
222
222
2222
11
460260612061200000
26046061206120
0000
ˆ
LEIC
LAEC
LCLCLCLCLCCLCC
CCLCLCLCLC
LCCLCCCC
k
=
=
−−−−
−−−
−
=
⋅−
−−−−
−−−
−
×==
000
0113.00225.0
00388.0
20.010.0010.010.0010.0067.0010.0067.00
00200210.010.0020.010.0010.0067.0010.0067.00002002
1070ˆˆˆ 3)1(
mkNmm
dkf
Substituting numerical values into the above equations gives:
⋅−
−
−
=
mkNkNkN
kNkN
mffmff
y
x
y
x
3.785.26
4730.05.26
473
ˆ
ˆˆˆ
ˆˆ
2
2
2
1
1
1

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 209
Rigid Plane Frame Example
Consider the frame shown in the figure below.
The frame is fixed at nodes 1 and 3 and subjected to a moment of 20 kN-m applied at node 2. Assume A = 2 x 10-2 m2, I = 2 x 10-4 m4, and E = 210 GPa for all elements.
Beam Element 1: The angle between x and x is 90°
10 == SC where
344
242
4
2 1034
)102(66105.1)4(
)102(1212 mLIm
LI −
−−
−
×=×
=×=×
=
37
6
/1025.54
10210 mkNLE
×=×
=
Therefore, the stiffness matrix for element 1, considering only the parts associated with node 2, is:
mkNk
yx dd
×=
08.0003.002003.00015.0
1025.5 5)1(
222 φ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 210
Beam Element 2: The angle between x and x is 0°
01 == SC where
344
252
4
2 104.25
)102(66106.9)5(
)102(1212 mLIm
LI −
−−
−
×=×
=×=×
=
37
6
/102.45
10210 mkNLE
×=×
=
Therefore, the stiffness matrix for element 2, considering only the parts associated with node 2, is:
mkNk
yx dd
×=
08.0024.00024.00096.00002
102.4 5)2(
222 φ
Assembling the elemental stiffness matrices we obtain the global stiffness matrix:
mkNK
=
0756.00101.00158.00101.00500.100158.008480.0
106
The global equations are:
=
⋅ 2
2
26
0756.00101.00158.00101.00500.100158.008480.0
1020
00
φy
x
dd
mkN
Solving the above equations gives:
62
62
42
4.95 102.56 102.66 10φ
−
−
−
− × = − ×
×
x
y
d md m
rad

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 211
Element 1: The beam element force-displacement equations can be obtained using dTkf ˆˆ = .
6 6
6 6
4 4
0 1 0 0 0 0 0 01 0 0 0 0 0 0 0
0 0 1 0 0 0 0 00 0 0 0 1 0 4.95 10 2.56 100 0 0 1 0 0 2.56 10 4.95 100 0 0 0 0 1 2.66 10 2.66 10
− −
− −
− −
−
= = − × − × − − × ×
× ×
Tdm mm m
rad rad
Therefore, the local force-displacement equations are:
−−−−
−−−
−
=
222
222
2222
11
222
222
2222
11
460260612061200000
26046061206120
0000
ˆ
LCLCLCLCLCCLCC
CCLCLCLCLC
LCCLCCCC
k
( ) mkN
mkN
LEIC
LAEC
25.6564
)102(10210
1005.14
10210)102(
3
46
32
662
1
=××
==
×=××
==
−
−
×××−
−−−−
−−−
−
×==
−
−
−
radmm
dTkf
4
6
63
)1(
1066.21095.41056.2
000
83043035.1035.10
002000020043083035.1035.100020000200
1025.5ˆˆ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 212
Solving for the forces and moments gives:
⋅−
−⋅
=
mkNkNkNmkN
kNkN
mffmff
y
x
y
x
17.112.4
69.259.5
2.469.2
ˆ
ˆˆˆ
ˆˆ
2
2
2
1
1
1
Element 2: The beam element force-displacement equations can be obtained using dTkf ˆˆ = .
××−×−
=
××−×−
=
−
−
−
−
−
−
radmm
radmm
dT
4
6
6
4
6
6
1066.21056.21095.4
000
1066.21056.21095.4
000
100000010000001000000100000010000001
Therefore, the local force-displacement equations are:
( ) mkN
mkN
LEIC
LAEC
3365
)102(10210
1084.05
10210)102(
3
46
32
662
1
=××
==
×=××
==
−
−
××−×−
−−−−
−−−
−
×==−
−
−
0001066.2
1056.21095.4
840.20440.2040.296.0040.296.00
0020000200440.20840.2040.296.0040.296.000020000200
102.4ˆˆ4
6
6
3)2(
radmm
dTkf

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 213
Solving for the forces and moments gives:
2
2
2
3
3
3
ˆ 4.16ˆ 2.69ˆ 8.92ˆ 4.16
2.69ˆ4.47ˆ
− ⋅ = −
⋅
x
y
x
y
f kNf kNm kN m
kNfkNfkN mm
Inclined or Skewed Supports
If a support is inclined, or skewed, at some angle α for the global x axis, as shown below, the boundary conditions on the displacements are not in the global x-y directions but in the x’-y’ directions.
We must transform the local boundary condition of d’3y = 0 (in local coordinates) into the global x-y system. Therefore, the relationship between of the components of the displacement in the local and the global coordinate systems at node 3 is:

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 214
−=
3
3
3
3
3
3
1000cossin0sincos
'''
φαααα
φy
x
y
x
dd
dd
We can rewrite the above expression as:
{ } { } [ ]
−==
1000cossin0sincos
][' 3333 αααα
tdtd
We can apply this sort of transformation to the entire displacement vector as:
{ } { } { } { }'][or][' dTddTd Tii ==
where the matrix [Ti] is:
=
][]0[]0[
]0[][]0[
]0[]0[][
][
3tI
ITi
Both the identity matrix [I] and the matrix [t3] are 3 x 3 matrices.
The force vector can be transformed by using the same transformation.
{ } { }fTf i ][' = In global coordinates, the force-displacement equations are:
{ } { }dKf ][= Applying the skewed support transformation to both sides of the force-displacement equation gives:
{ } { }dKTfT ii ]][[][ =

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 215
By using the relationship between the local and the global displacements, the force-displacement equations become:
{ } { } { } { }']][][['']][][[][ dTKTfdTKTfT Tii
Tiii =⇒=
Therefore the global equations become:
=
1
3
3
2
2
2
1
1
1
3
3
3
2
2
2
1
1
1
''
]][][[
''
φ
φ
φ
y
x
y
x
y
x
Tii
y
x
y
x
y
x
dd
dd
dd
TKT
MFFMFFMFF
Grid Equations
A grid is a structure on which the loads are applied perpendicular to the plane of the structure, as opposed to a plane frame where loads are applied in the plane of the structure. Both torsional and bending moment continuity are maintained at each node in a grid element. Examples of a grid structure are floors and bridge deck systems. A typical grid structure is shown in the figure below.

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 216
A representation of the grid element is shown below:
The degrees of freedom for a grid element are: a vertical displacement iyd (normal to the grid), a torsional rotation ixφ about the x axis, and a bending rotation izφ about the z axis. The nodal forces are: a transverse force iyf a torsional moment ixm about the x axis, and a bending moment izm about the z axis.
Let’s derive the torsional rotation components of the element stiffness matrix. Consider the sign convention for nodal torque and angle of twist shown the figure below.
A linear displacement function φ is assumed.
xaa ˆ21 +=φ Applying the boundary conditions and solving for the unknown coefficients gives:
xxx x
L 112 ˆˆˆˆ
φφφφ +
−=

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 217
Or in matrix form:
[ ]
==x
xNN2
121 ˆ
ˆˆφφ
φ
where N1 and N2 are the interpolation functions gives as:
LxN
LxN =−= 21
ˆ1
To obtain the relationship between the shear strain γ and the angle of twist φ consider the torsional deformation of the bar as shown below.
If we assume that all radial lines, such as OA, remain straight during twisting or torsional deformation, then the arc length AB is:
φγ ˆˆmax RdxdAB == Therefore;
xdRd
ˆˆ
max
φγ =
At any radial position, r, we have, from similar triangles OAB and OCD:

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 218
( )xxLr
xddr 12
ˆˆˆˆ
φφφγ −==
The relationship between shear stress and shear strain is:
τ γ=G where G is the shear modulus of the material. From elementary mechanics of materials, we get:
ˆ τ=x
JmR
where J is the polar moment of inertia for a circular cross section or the torsional constant for non-circular cross sections. Rewriting the above equation we get:
( )2 1ˆ ˆˆ φ φ= −x x x
GJmL
The nodal torque sign convention gives:
xxxx mmmm ˆˆˆˆ 21 =−= Therefore;
( ) ( )1 1 2 2 2 1ˆ ˆ ˆ ˆˆ ˆφ φ φ φ= − = −x x x x x x
GJ GJm mL L
In matrix form the above equations are:
−
−=
x
x
x
x
LGJ
mm
2
1
2
1
ˆˆ
1111
ˆˆ
φφ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 219
Combining the torsional effects with shear and bending effects, we obtain the local stiffness matrix equations for a grid element.
−−
−−−−
−−
=
z
x
y
z
x
y
LEI
LEI
LEI
LEI
LGJ
LGJ
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LGJ
LGJ
LEI
LEI
LEI
LEI
z
x
y
z
x
y
d
d
mmf
mmf
2
2
2
1
1
1
4626
612612
2646
612612
2
2
2
1
1
1
ˆˆˆˆˆˆ
000000
0000
000000
ˆˆ
ˆˆˆ
ˆ
22
2323
22
2323
φφ
φφ
The transformation matrix relating local to global degrees of freedom for a grid is:
−
−=
CSSC
CSSC
TG
00000000
00100000000000000001
where θ is now positive taken counterclockwise from x to x in the x-z plane: therefore;
Lzz
qSL
xxC ijij −
==−
== sincosθ
The global stiffness matrix for a grid element arbitrary oriented in the x-z plane is given by:
GGT
GG TkTk ˆ=

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 220
Grid Example
Consider the frame shown in the figure below.
The frame is fixed at nodes 2, 3, and 4, and is subjected to a load of 100 kips applied at node 1. Assume I = 400 in.4, J = 110 in.4, G = 12 x 10 3 ksi, and E = 30 x 10 3 ksi for all elements.
To facilitate a timely solution, the boundary conditions at nodes 2, 3, and 4 are applied to the local stiffness matrices at the beginning of the solution.
000
444
333
222
=========
zxy
zxy
zxy
ddd
φφφφφφ
Beam Element 1:
447.036.221020sin894.0
36.22200cos )1(
12)1(
12 =−
=−
==−=−
=−
==L
zzSL
xxC θθ
where
3 3
3 3 2 212 12(30 10 )(400) 6 6(30 10 )(400)7.45 1,000
(22.36 12) (22.36 12)× ×
= = = =× ×
EI EIk kinL L

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 221
3 34 4(30 10 )(400) (12 10 )(110)179,000 4,920(22.36 12) (22.36 12)
× ×= = ⋅ = = ⋅
× ×EI GJk in k inL L
The global stiffness matrix for element 1, considering only the parts associated with node 1, and the following relationship:
GGT
GG TkTk ˆ=
−−−=
−−−=
894.0447.00447.0894.00001
894.0447.00447.0894.00001
TGG TT
inkk
zxyd
=
000,1790000,10920,40
000,1045.7ˆ )1(
111 φφ
Therefore, the global stiffness matrix is
inkk
zxyd
−−
−−=
000,144600,69894600,69700,39447
89444745.7)1(
111 φφ
Beam Element 2:
447.036.22100sin894.0
36.22200cos )2(
13)2(
13 −=−
=−
==−=−
=−
==L
zzSL
xxC θθ
where
3 3
3 3 2 212 12(30 10 )(400) 6 6(30 10 )(400)7.45 1,000
(22.36 12) (22.36 12)× ×
= = = =× ×
EI EIk kinL L

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 222
3 34 4(30 10 )(400) (12 10 )(110)179,000 4,920
(22.36 12) (22.36 12)× ×
= = ⋅ = = ⋅× ×
EI GJk in k inL L
The global stiffness matrix for element 2, considering only the parts associated with node 1, and the following relationship:
GGT
GG TkTk ˆ=
−−−
−−−=
894.0447.00447.0894.00001
000,1790000,10920,40
000,1045.7
894.0447.00447.0894.00001
)2(k
Therefore, the global stiffness matrix is
inkk
zxyd
−−−−
=000,144600,69894600,69700,39447
89444745.7)2(
111 φφ
Beam Element 3:
110
100sin010
2020cos )3(14
)3(14 −=
−=
−===
−=
−==
LzzS
LxxC θθ
where
kLEIink
LEI 000,5
)1210()400)(1030(66/3.83
)1210()400)(1030(1212
2
3
23
3
3=
××
==×
×=
inkL
GJinkLEI
⋅=×
×=⋅=
××
= 000,11)1210(
)110)(1012(000,400)1210(
)400)(1030(44 33
The global stiffness matrix for element 3, considering only the parts associated with node 1, and the following relationship:
GGT
GG TkTk ˆ=

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 223
−
−=
010100
001
000,4000000,50000,110000,503.83
010100001
)3(k
Therefore, the global stiffness matrix is
=
000,11000000,400000,50000,53.83
)3(
111
k
zxyd φφ
Superimposing the three elemental stiffness matrices gives:
1 1 1
98.2 5,000 1,7905,000 479,000 01,790 0 299,000
φ φ
− = −
y x zd
K
The global equations are:
1 1
1 1
1 1
100 98.2 5,000 1,7900 5,000 479,000 00 1,790 0 299,000
φφ
= − − = = = −
y y
x x
z z
F k dMM
Solving the above equations gives:
−
−=
radrad
ind
z
x
y
0169.00295.0
83.2
1
1
1
φφ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 224
Element 1: The grid element force-displacement equations can be obtained using dTkf GG
ˆˆ = .
−−
=
−
−
−−−
−−−
=
000
00192.00339.0
83.2
000
0169.00295.0
83.2
894.0447.00000447.0894.00000001000000894.0447.00000447.0894.00000001
radradin
radradin
dTG
Therefore, the local force-displacement equations are:
−−
−−
−−−−
−−
==
000
00192.00339.0
83.2
000,1790000,1500,890000,10920,400920,40000,1045.7000,1045.7500,890000,1000,1790000,10920,400920,40
000,1045.7000,1045.7
ˆˆ)1(
radradin
dTkf
Solving for the forces and moments gives:
1
1
1
2
2
2
ˆ 19.2ˆ 167ˆ 2,480ˆ 19.2
167ˆ2,260ˆ
− − ⋅ − ⋅ = ⋅
− ⋅
y
x
z
y
x
z
f km k inm k in
kfk inmk inm

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 225
Element 2: The grid element force-displacement equations can be obtained using dTkf GG
ˆˆ = .
−−
=
−
−
−−−
−−−
=
000
0283.00188.0
83.2
000
0169.00295.0
83.2
894.0447.00000447.0894.00000001000000894.0447.00000447.0894.00000001
radradin
radradin
dTG
Therefore, the local force-displacement equations are:
−−
−−
−−−−
−−
==
000
0283.00188.0
83.2
000,1790000,1500,890000,10920,400920,40000,1045.7000,1045.7500,890000,1000,1790000,10920,400920,40
000,1045.7000,1045.7
ˆˆ)2(
radradin
dTkf
Solving for the forces and moments gives:
1
1
1
3
3
3
ˆ 7.23ˆ 92.5ˆ 2,240ˆ 7.23
92.5ˆ295ˆ
− ⋅ − ⋅ =
− ⋅
− ⋅
y
x
z
y
x
z
f km k inm k in
kfk inm
k inm

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 226
Element 3: The grid element force-displacement equations can be obtained using dTkf GG
ˆˆ = .
−
=
−
−
−
−
=
000
0295.00169.0
83.2
000
0169.00295.0
83.2
010000100000
001000000010000100000001
radradin
radradin
dTG
Therefore, the local force-displacement equations are:
−
−−
−−−−
−−
==
000
0295.00169.0
83.2
000,4000000,5000,2000000,50000,1100000,110000,503.83000,503.83000,2000000,5000,4000000,5
0000,1100000,110000,503.83000,503.83
ˆˆ)3(
radradin
dTkf
Solving for the forces and moments gives:
1
1
1
4
4
4
ˆ 88.1ˆ 186ˆ 2,340ˆ 88.1
186ˆ8,240ˆ
− ⋅ − ⋅ = − ⋅
− ⋅
y
x
z
y
x
z
f km k inm k in
kfk inmk inm

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 227
To check the equilibrium of node 1 the local forces and moments for each element need to be transformed to global coordinates. Recall, that:
1ˆˆ −==⇒= TTfTfTff TT Since we are only checking the forces and moments at node 1, we need only the upper-left-hand portion of the transformation matrix TG. Therefore; for Element 1:
1
1
1
1 0 0 19.2 19.20 0.894 0.447 167 1,2600 0.447 0.894 2,480 2,150
− − = − − − ⋅ = ⋅ − − ⋅ ⋅
y
x
z
f k km k in k inm k in k in

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 228
Therefore; for Element 2:
1
1
1
1 0 0 7.23 7.230 0.894 0.447 92.5 1,0800 0.447 0.894 2,240 1,960
− = − − ⋅ = ⋅ − − − ⋅ − ⋅
y
x
z
f k km k in k inm k in k in
Therefore; for Element 3:
1
1
1
1 0 0 88.1 88.10 0 1 2,340 2,3400 1 0 186 186
− − = − ⋅ = − ⋅ − − ⋅ − ⋅
y
x
z
f k km k in k inm k in k in
The forces and moments that are applied to node 1 by each element are equal in magnitude and opposite direction. Therefore the sum of the forces and moments acting on node 1 are:
The forces and moments accurately satisfy equilibrium considering the amount of truncation error inherent in results of the calculations presented in this example.
kF y 07.01.882.1923.71001 =++−−=∑
inkM x ⋅=+−−=∑ 0.0340,2080,1260,11
inkM z ⋅−=++−=∑ 0.4186060,1150,21

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 229
Grid Example
Consider the frame shown in the figure below.
The frame is fixed at nodes 1 and 3, and is subjected to a load of 22 kN applied at node 2. Assume I = 16.6 x 10-5 m4, J = 4.6 x 10-5 m4, G = 84 GPa, and E = 210 GPa for all elements.
To facilitate a timely solution, the boundary conditions at nodes 1 and 3 are applied to the local stiffness matrices at the beginning of the solution.
00
333
111
======
zxy
zxy
dd
φφφφ
Beam Element 1: the local x axis coincides the global x axis
030sin1
33cos )1(
12)1(
12 ==−
====−
==L
zzSL
xxC θθ
where
mkNLEI /1055.1
)3()106.16)(10210(1212 4
3
56
3 ×=××
=−
kNLEI 4
2
56
2 1032.2)3(
)106.16)(10210(66×=
××=
−
mkNLEI ·1065.4
3)106.16)(10210(44 4
56
×=××
=−
mkNL
GJ ·10128.03
)106.4)(1084( 456
×=××
=−

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 230
The global stiffness matrix for element 1, considering only the parts associated with node 2, may be obtained from the following relationship:
GGT
GG TkTk ˆ=
mkNk
−
−
=
100010001
65.4032.20128.0032.2055.1
100010001
104)1(
Therefore, the global stiffness matrix is
mkNk
zxyd
−
−=
65.4032.20128.0032.2055.1
104)1(
222 φφ
Beam Element 2: the local x axis is located from node 2 to node 3
133sin0
30cos )1(
23)2(
23 −=−
=−
====−
==L
zzqSL
xxC θ
The global stiffness matrix for element 2, considering only the parts associated with node 2, may be obtained using:
GGT
GG TkTk ˆ=
mkNk
−
−
−
−=
010100
001
65.4032.20128.0032.2055.1
010100001
104)2(
Therefore, the global stiffness matrix is
mkNk
zxyd
=
128.000065.432.2032.255.1
104)2(
222 φφ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 231
Superimposing the two elemental stiffness matrices gives:
mkNK
zxyd
−
−=
78.4032.2078.432.2
32.232.210.310 4
222 φφ
The global equations are:
−
−=
==
−=
x
x
y
z
x
y d
MM
kNF
2
2
24
2
2
2
78.4032.2078.432.232.232.210.3
1000
22
φφ
Solving the above equations gives:
2
2
2
0.002590.001260.00126
φφ
− = −
y
x
z
d mradrad
Element 1: The grid element force-displacement equations can be obtained using dTkf GG
ˆˆ = .
−
−=
−
−
=
radrad
m
radrad
mdTG
00126.000126.0
00259.0000
00126.000126.0
00259.0000
100000010000001000000100000010000001

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 232
Therefore, the local force-displacement equations are:
−
−
−−
−−−−
−−
==
radrad
mdTkf
00126.000126.0
00259.0000
65.4032.233.2032.20128.000128.0032.2055.132.2055.1
33.2032.265.4032.20128.000128.0032.2055.132.2055.1
10ˆˆ 4)1(
Solving for the forces and moments gives:
1
1
1
2
2
2
ˆ 11.0ˆ 1.50ˆ 31.0ˆ 11.0
1.50ˆ1.50ˆ
− ⋅ ⋅ =
− ⋅
⋅
y
x
z
y
x
z
f kNm kN mm kN m
kNfkN mmkN mm
Element 2: The grid element force-displacement equations can be obtained using dTkf GG
ˆˆ = .
−
=
−
−
−
−
=
000
00126.000126.0
00259.0
000
00126.000126.0
00259.0
010000100000
001000000010000100000001
radrad
m
radrad
m
dTG

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 233
Therefore, the local force-displacement equations are:
−
−−
−−−−
−−
==
000
00126.000126.0
00259.0
65.4032.233.2032.20128.000128.0032.2055.132.2055.1
33.2032.265.4032.20128.000128.0032.2055.132.2055.1
10ˆˆ 4)2(
radrad
m
dTkf
Solving for the forces and moments gives:
2
2
2
3
3
3
ˆ 11.0ˆ 1.50ˆ 1.50ˆ 11.0
1.50ˆ31.0ˆ
− ⋅ − ⋅ = − ⋅
− ⋅
y
x
z
y
x
z
f kNm kN mm kN m
kNfkN mm
kN mm

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 234
Beam Element Arbitrarily Oriented in Space
In this section we will develop a beam element that is arbitrarily oriented in three-dimensions. This element can be used to analyze three-dimensional frames. Let consider bending about axes, as shown below.
The axis y is the principle axis for which the moment of inertia is minimum, Iy. The right-hand rule is used to establish the z axis and the maximum moment of inertia, Iz. Bending in the zx ˆˆ − plane: The bending in the zx − plane is defined by ym . The stiffness matrix for bending the in the x-z plane is:
−−
−−
−−=
3
2
3
2
2
2
3
2
3
2
2
2
4
4626
612612
2646
612612
ˆ
LLLL
LL
LL
LLLL
LL
LL
LEI
k yY
where Iy is the moment of inertia about the y axis (the weak axis).

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 235
Bending in the yx ˆˆ − plane: The bending in the yx − plane is defined by zm . The stiffness matrix for bending the in the yx − plane is:
−−
−−
−−=
3
2
3
2
2
2
3
2
3
2
2
2
4
4626
612612
2646
612612
ˆ
LLLL
LL
LL
LLLL
LL
LL
LEIk z
z
where Iz is the moment of inertia about the z axis (the strong axis).
Direct superposition of the bending stiffness matrices with the effects of axial forces and torsional rotation give:
zyxzyxzyxzyx dddddd 222222111111ˆˆˆˆˆˆˆˆˆˆˆˆ φφφφφφ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 236
The global stiffness matrix may be obtained using:
TkTk T ˆ= where
=
33
33
33
33
x
x
x
x
T
λλ
λλ
where
=
zzzyzx
yzyyyx
xzxyxx
x
CCCCCCCCC
ˆˆˆ
ˆˆˆ
ˆˆˆ
33λ
where the direction cosines,
jiC ˆ , are defined as shown below
The direction cosines of the x axis are:
kjix xzxyxx ˆˆˆ coscoscosˆ θθθ ++= where
nL
zzmL
yylL
xxxzxyxx =
−==
−==
−= 12
ˆ12
ˆ12
ˆ coscoscos θθθ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 237
The y axis is selected to be perpendicular to the x and the z axes is such a way that the cross product of global z with x results in the y axis as shown in the figure below.
jDli
Dm
nml
kji
Dyxz +−===× 1001ˆˆ
where 22 mlD +=
The z axis is determined by the condition that yxz ˆˆˆ ×=
kDjD
mniDnl
lmnmlkji
Dyxz +−−=
−=×=
0
1ˆˆˆ
Therefore, the transformation matrix
=
zzzyzx
yzyyyx
xzxyxx
x
CCCCCCCCC
ˆˆˆ
ˆˆˆ
ˆˆˆ
33λ
becomes
yxz ˆˆ =×

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 238
−
−=
DD
mnDnl
Dl
Dm
nml
x 033λ
There are two exceptions that arise when using the above expressions for mapping the local coordinates to the global system: (1) when the positive x coincides with z; and (2) when the positive x is in the opposite direction as z. For the first case, it is assumed that y is y.
In case two, it is assumed that y is y.
−=
001000100
λ
−=
001000100
λ

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 239
If the effects of axial force, both shear forces, twisting moment, and both bending moments are considered, the stiffness matrix for a frame element is:

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 240
In this case the symbol φ are:
2 2
12 12y zy z
s s
EI EIGA L GA L
φ φ= =
where As is the effective beam cross-section in shear. Recall the shear modulus of elasticity or the modulus of rigidity, G, is related to the modulus of elasticity and the Poisson’s ratio, ν as:
( )2 1
EGν
=+
If φy and φz are set to zero, the stiffness matrix reduces the that shown previously on page 235. This is the form of the stiffness matrix used by SAP2000 for its frame element.

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 241
Example Frame Application
A bus subjected to a static roof-crush analysis. In this model 599 frame elements and 357 nodes are used.
Concept of Substructure Analysis
Sometimes structures are too large to be analyzed as a single system or treated as a whole; that is, the final stiffness matrix and equations for solution exceed the memory capacity of the computer. A procedure to overcome this problem is to separate the whole structure into smaller units called substructures. For example, the space frame of an airplane, as shown below, may require thousands of nodes and elements to completely model and describe the response of the whole structure. If we separate the aircraft into substructures,

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 242
such as parts of the fuselage or body, wing sections, etc., as shown below, then we can solve the problem more readily and on computers with limited memory.

CIVL 7117 Finite Elements Methods in Structural Mechanics Page 243
Problems
14. Do problems 5.3, 5.8, 5.13, 5.28, 5.41, and 5.43 on pages 240 - 263 in your textbook “A First Course in the Finite Element Method” by D. Logan.
15. Do problems 5.23, 5.25, 5.35, 5.39, and 5.55 on pages 240 - 263 in your textbook “A First Course in the Finite Element Method” by D. Logan. You may use the SAP 2000 to do frame analysis.