Embed Size (px)
DESCRIPTION
This Book is useful for final year Electronics Engineering.
Citation preview

PLACEMENT HAND-BOOK
2012 – 2013
Complied by
Mr.U.Ragavendran
ECE

ACKNOWLEDGEMENT
This is our privilege and pleasant task to express our sincere
gratitude to our respected Director Dr.C.Muthamizhchelvan, Faculty of
Engineering and Technology from whom we had received support and
guidance in the process of this book.
We record our sincere thanks to Dr. S. Malarvizhi, Head of the
Department, Dept. of Electronics and Communication, SRM University,
for providing us the necessary departmental facilities to publish this book.
We also extend our gratitude to Dr.R.Kumar, Professor, Dept. of
Electronics and Communication, SRM University for his useful
instructions and guidance to complete this book.
We deliver our heartfelt gratitude to Mr. P.Vijayakumar
Assistant Professor (Sr.G), Dept. of Electronics and Communication,
SRM University and Placement Team Members for the encouragement
and support they gave in preparation of this book.
We sincerely thank all the Teaching and Non- Teaching Staffs for
their support.
Authors

INDEX
CHAPTER
NUMBER TITLE
PAGE
NUMBER
1 BASIC ELECTRONICS Mr.R.Ramesh
1
2 MICROPROCESSOR & MICRO
CONTROLLER Mrs.R.Vinolee
15
3 DIGITAL ELECTRONICS Mrs.K.Suganthi
52
4 DATA COMMUNICATION &
COMPUTER NETWORK Mrs.V.Nithya & Mr. M. Aravindan
77
5 HARDWARE DESCRIPTION
LANGUAGE Mrs. K. Ferents Koni Jiavana
94
6 COMPUTER ARCHITECTURE Mrs. A. Vinnarasi
159

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 1
CHAPTER 1
BASIC ELECTRONICS

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 2
1. What is the color code for a 220 5 % resistor?
A.Red, Red, Brown, Gold
B.Orange, Orange, Black, Gold
C.Red, Red, Black, Gold
D.Red, Red, Brown, Silver
2. If 60 J of energy are available for every 15 C of charge, what is the voltage?
A.4 V
B.60 V
C.15 V
D.0.25 V
3. An atom's atomic number is determined by the number of:
A.neutrons minus protons
B.protons
C.electrons
D.neutrons
4. Which resistive component is designed to be temperature sensitive?
A.Thermistor
B.Rheostat
C.Potentiometer
D.Photoconductive cell
5. In practical applications, battery voltage:
A. is restored as soon as disconnect occurs
B. is lowered as the load increases
C. may be stored indefinitely
D. will be reduced to zero as power is drawn
6. A voltmeter is used:
A. to measure current
B. in series with the circuit
C. in parallel with the circuit
D. to measure coulombs
7. If the current in a circuit equals 0 A, it is likely that the
A. voltage is too high
B. resistance is too low
C. circuit has a short
D. circuit is open
8. Which voltage source converts chemical energy to electrical energy?
A. Electrical generator
B. Battery
C. Solar cell
D. Electronic power supply

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 3
9. In which states may matter may be found?
A. solid, liquid, or mineral
B. solid, gas, or liquid
C. mineral, gas, or liquid
D. plastic, solid, or gas
10. How many valence shell electrons are there in semiconductor atoms?
A. 16 B. 8
C. 4 D. 2
11. When considering conventional current versus electron current flow:
A. electron current flow came first
B. protons move in conventional current flow
C. conventional current flow came first
D. the direction of current is the same in both methods
12. The center frequency of a band-pass filter is always equal to the
A. bandwidth
B. –3 dB frequency
C. bandwidth divided by Q
D. geometric average of the critical frequencies
13. A zero-level detector is a
A. comparator with a sine-wave output
B. comparator with a trip point referenced to zero
C. peak detector
D. limiter
14. A digital-to-analog converter is an application of the
A. scaling adder
B. voltage-to-current converter
C. noninverting amplifier
D.adjustable bandwidth circuit
15. If the input to a comparator is a sine wave, the output is a
A. ramp voltage
B. sine wave
C. rectangular wave
D. sawtooth wave
16. A basic series regulator has
A. an error detector
B. a load
C. a reference voltage
D. both an error detector and a reference voltage
17. A comparator is an example of a(n)
A. active filter
B. current source

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 4
C. linear circuit
D. nonlinear circuit
18. An ideal operational amplifier has
A. infinite output impedance
B. zero input impedance
C. infinite bandwidth
D. All of the above
19. Another name for a unity gain amplifier is:
A. difference amplifier
B. comparator
C. single ended
D. voltage follower
20. If ground is applied to the (+) terminal of an inverting op-amp, the (–) terminal will:
A. not need an input resistor
B. be virtual ground
C. have high reverse current
D. not invert the signal
21. An astable multivibrator is also known as a:
A. one-shot multivibrator
B. free-running multivibrator
C. bistable multivibrator
D. monostable multivibrator
22. With negative feedback, the returning signal:
A. aids the input signal
B. is proportional to output current
C. opposes the input signal
D. is proportional to differential voltage gain
23. A circuit whose output is proportional to the difference between the input signals is
considered to be which type of amplifier?
A. common-modeB. darlington
C. differentialD. operational
24. The voltage follower has a:
A. closed-loop voltage gain of unity
B. small open-loop voltage gain
C. closed-loop bandwidth of zero
D. large closed-loop output impedance
25. The ratio between differential gain and common-mode gain is called:
A. amplitude
B. differential-mode rejection
C. common-mode rejection
D. phase
26. If the input to a comparator is a sine wave, the output is a:
A. ramp voltage
B. sine wave

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 5
C. rectangular wave
D. sawtooth wave
27. An instrumentation amplifier has a high
A. output impedance
B. power gain
C. CMRR
D. supply voltage
28. Circuits that shift the dc level of a signal are called
A. limiters
B. clampers
C. peak detectors
D. dc converters
29. The major difference between ground and virtual ground is that virtual ground is only a:
A. voltage reference
B. current reference
C. power reference
D. difference reference
30. The Schmitt trigger is a two-state device that is used for:
A. pulse shaping
B. peak detection
C. input noise rejection
D. filtering
31. When a capacitor is used in place of a resistor in an op-amp network, its placement
determines:
A. open- or closed-loop gain
B. integration or differentiation
C. saturation or cutoff
D. addition or subtraction
32. The common-mode voltage gain is
A. smaller than differential voltage gain
B. equal to voltage gain
C. greater than differential voltage gain
D. None of the above
33. An output that is proportional to the addition of two or more inputs is from which type of
amplifier?
A. differentiator
B. difference
C. summing
D. analog subtractor
34. An ideal amplifier should have:
A. high input current
B. zero offset
C. high output impedance
D. moderate gain

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 6
35. What is the difference between common-mode and differential-mode input signals?
A. phase relationship
B. voltage
C. current
D. apparent power
36. What is a varistor?
A. a voltage-dependent resistor
B. a voltage-dependent diode
C. a current-dependent resistor
D. a current-dependent diode
37. Which type of transformer is required to create a 180 degree input to a rectifier?
A. center-tapped secondary
B. step-down secondary
C. stepped-up secondary
D. split winding primary
38. Since diodes are destroyed by excessive current, circuits must have:
A. higher voltage sources
B. current limiting resistors
C. more dopants
D. higher current sources
39. A diode for which you can change the reverse bias, and thus vary the capacitance is called
a
A. varactor diode
B. tunnel diode
C. zener diode
D. switching diode
40. When a diode is forward biased, the voltage across it
A. is directly proportional to the current
B. is inversely proportional to the current
C. is directly proportional to the source voltage
D. remains approximately the same
41. Why is heat produced in a diode?
A. due to current passing through the diode
B. due to voltage across the diode
C. due to the power rating of the diode
D. due to the PN junction of the diode
42. The arrow in the schematic symbol of a diode points to
A. the n-type material, which is called the anode
B. the n-type material, which is called the cathode
C. the p-type material, which is called the anode
D. the p-type material, which is called the cathode
43. The diode schematic arrow points to the:
A. trivalent-doped material
B. positive axial lead

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 7
C. anode lead
D. cathode lead
44. Rectifier output polarity depends upon:
A. cycles of input
B. capacitor polarity
C. half or full wave
D. diode installation
45. The conduction band is closest to the valence band in
A. semiconductors
B. conductors
C. insulators
D. The distance is the same for all of the above.
46. Which of the following circuits would require the least amount of filtering?
A. A half-wave rectifier
B. A full-wave rectifier
C. A bridge rectifier
D. A full-wave rectifier and a bridge rectifier
47. The voltage where current may start to flow in a reverse-biased pn junction is called the
A. breakdown voltage
B. barrier potential
C. forward voltage
D. biasing voltage
48. The area at the junction of p-type and n-type materials that has lost its majority carriers is
called the
A. barrier potential
B. depletion region
C. n region
D. p region
49. At any given time in an intrinsic piece of semiconductor material at room temperature
A. electrons drift randomly
B. recombination occurs
C. holes are created
D. All of the above
50. List three diode packages:
A. clip package, DIP, small current package
B. DIP, small current package, large current package
C. small current package, large current package, and SIP
D. small current package, large current package, clip package
51. When transistors are used in digital circuits they usually operate in the:
A. active region
B. breakdown region
C. saturation and cutoff regions
D. linear region

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 8
52. To operate properly, a transistor's base-emitter junction must be forward biased with
reverse bias applied to which junction?
A. collector-emitterB. base-collector
C. base-emitterD. collector-base
53. The C-B configuration is used to provide which type of gain?
A. voltageB. current
C. resistanceD. power
54. A transistor may be used as a switching device or as a:
A. fixed resistor
B. tuning device
C. rectifier
D. variable resistor
55. With low-power transistor packages, the base terminal is usually the:
A. tab end
B. middle
C. right end
D. stud mount
56. When a silicon diode is forward biased, what is VBE for a C-E configuration?
A. voltage-divider bias
B. 0.4 V
C. 0.7 V
D. emitter voltage
57. With a PNP circuit, the most positive voltage is probably:
A. groundB. VC
C. VBED. VCC
58. Most of the electrons in the base of an NPN transistor flow:
A. out of the base lead
B. into the collector
C. into the emitter
D. into the base supply
59. In a transistor, collector current is controlled by:
A. collector voltage
B. base current
C. collector resistance
D. all of the above
60. Total emitter current is:
A. IE – IC
B. IC + IE
C. IB + IC
D. IB – IC

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 9
61. For a C-C configuration to operate properly, the collector-base junction should be reverse
biased, while forward bias should be applied to which junction?
A. collector-emitterB. base-emitter
C. collector-baseD. cathode-anode
JUNCTION FIELD EFFECT TRANSISTORS (JFET)
62. Junction Field Effect Transistors (JFET) contain how many diodes?
A. 4B. 3
C. 2D. 1
63. In the constant-current region, how will the IDS change in an n-channel JFET?
A. As VGS decreases ID decreases.
B. As VGS increases ID increases.
C. As VGS decreases ID remains constant.
D. As VGS increases ID remains constant.
64. A MOSFET has how many terminals?
A. 2 or 3
B. 3
C. 4
D. 3 or 4
65. A very simple bias for a D-MOSFET is called:
A. self biasing
B. gate biasing
C. zero biasing
D. voltage-divider biasing
66. With the E-MOSFET, when gate input voltage is zero, drain current is:
A. at saturation
B. zero
C. IDSS
D. widening the channel
67. How will electrons flow through a p-channel JFET?
A. from source to drain
B. from source to gate
C. from drain to gate
D. from drain to source
68. When VGS = 0 V, a JFET is:
A. saturated
B. an analog device
C. an open switch
D. cut off
69. When the JFET is no longer able to control the current, this point is called the:

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 10
A. breakdown region
B. depletion region
C. saturation point
D. pinch-off region
70. Which type of JFET bias requires a negative supply voltage?
A. feedback
B. source
C. gate
D. voltage divider
71. In an n-channel JFET, what will happen at the pinch-off voltage?
A. the value of VDS at which further increases in VDS will cause no further increase in ID
B. the value of VGS at which further decreases in VGS will cause no further increases in ID
C. the value of VDG at which further decreases in VDG will cause no further increases in ID
D. the value of VDS at which further increases in VGS will cause no further increases in ID
72. A TRIAC:
A. can trigger only on positive gate voltages
B. can trigger only on negative gate voltages
C. cannot be triggered with gate voltages
D. can be triggered by either a positive or a negative gate voltage
73. What does a hall effect sensor sense?
A. temperature
B. moisture
C. magnetic fields
D. pressure
74. What causes the piezoelectric effect?
A. heat or dissimilar metals
B. pressure on a crystal
C. water running on iron
D. a magnetic field
75. A UJT has:
A. two base leads
B. one emitter lead
C. two emitter leads and one base lead
D. one emitter lead and two base leads
76. The only way to close an SCR is with:
A. a trigger input applied to the gate
B. forward breakover voltage
C. low-current dropout
D. valley voltage
77. What is an SCR?
A. a PNPN thyristor with 3 terminals
B. a PNPN thyristor with 4 terminals
C. a PNP thyristor with 3 terminals
D. an NPN thyristor with 3 terminals

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 11
78. What type of application would use a photovoltaic cell?
A. an automobile horn
B. a TI 92 calculator
C. a magnetic field detector
D. a remote power source
79. The smallest amount of current that the cathode-anode can have, and still sustain
conduction of an SCR is called the:
A. maximum forward current
B. maximum forward gate current
C. holding current
D. reverse gate leakage current
80. Once a DIAC is conducting, the only way to turn it off is with:
A. a positive gate voltage
B. a negative gate voltage
C. low-current dropout
D. breakover
81. The DIAC is a:
A. transistor
B. unidirectional device
C. three-layer device
D. bidirectional device
82. A transducer's function is to:
A. transmit electrical energy
B. convert energy
C. produce mechanical energy
D. prevent current flow
83. Intrinsic semiconductor material is characterized by a valence shell of how many
electrons?
A. 1B. 2
C. 4D. 6
84. What causes the depletion region?
A. doping
B. diffusion
C. barrier potential
D. ions
85. What is an energy gap?
A. the space between two orbital shells
B. the energy equal to the energy acquired by an electron passing a 1 V electric field
C. the energy band in which electrons can move freely
D. an energy level at which an electron can exist
86. In "n" type material, majority carriers would be:

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 12
A. holesB. dopants
C. slowerD. electrons
87. Elements with 1, 2, or 3 valence electrons usually make excellent:
A. conductorsB. semiconductors
C. insulatorsD. neutral
88. A commonly used pentavalent material is:
A. arsenicB. boron
C. galliumD. neon
89. Which material may also be considered a semiconductor element?
A. carbonB. ceramic
C. micaD. argon
90. What can a semiconductor sense?
A. magnetism
B. temperature
C. pressure
D. all of the above
91. When an electron jumps from the valence shell to the conduction band, it leaves a gap.
What is this gap called?
A. energy gap
B. hole
C. electron-hole pair
D. recombination
92. Forward bias of a silicon P-N junction will produce a barrier voltage of approximately
how many volts?
A. 0.2B. 0.3
C. 0.7D. 0.8
93. Which semiconductor material is made from coal ash?
A. germaniumB. silicon
C. tinD. carbon
94. When and who discovered that more than one transistor could be constructed on a single
piece of semiconductor material:
A. 1949, William Schockley
B. 1955, Walter Bratten
C. 1959, Robert Noyce
D. 1960, John Bardeen
95. When is a P-N junction formed?
A. in a depletion region
B. in a large reverse biased region
C. the point at which two opposite doped materials come together
D. whenever there is a forward voltage drop

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 13
96. What is a type of doping material?
A. extrinsic semiconductor material
B. pentavalent material
C. n-type semiconductor
D. majority carriers
97. Minority carriers are many times activated by:
A. heat
B. pressure
C. dopants
D. forward bias
98. Which of the following cannot actually move?
A. majority carriers
B. ions
C. holes
D. free electrons
99. What electrical characteristic of intrinsic semiconductor material is controlled by the
addition of impurities?
A. conductivity
B. resistance
C. power
D. all of the above
100. Base 10 refers to which number system?
A. binary coded decimal
B. decimal
C. octal
D. hexadecimal

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 14
ANSWER
1 A 26 C 51 C 76 B
2 A 27 C 52 D 77 A
3 B 28 B 53 A 78 D
4 A 29 A 54 D 79 D
5 B 30 A 55 B 80 C
6 C 31 B 56 C 81 D
7 D 32 A 57 A 82 B
8 B 33 C 58 B 83 C
9 B 34 B 59 B 84 D
10 C 35 A 60 C 85 A
11 C 36 A 61 A 86 D
12 D 37 A 62 D 87 A
13 B 38 B 63 A 88 A
14 A 39 A 64 D 89 A
15 C 40 D 65 C 90 D
16 D 41 A 66 B 91 B
17 D 42 C 67 A 92 C
18 C 43 D 68 A 93 A
19 D 44 D 69 A 94 C
20 B 45 B 70 C 95 C
21 B 46 D 71 A 96 B
22 C 47 A 72 D 97 A
23 C 48 B 73 C 98 C
24 A 49 D 74 B 99 A
25 C 50 D 75 D 100 B

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 15
CHAPTER 2
MICROPROCESSOR
&
MICROCONTROLLER

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 16
Definition:
Microprocessor is a program-controlled device, which fetches the instructions from memory,
decodes and executes the instructions. . A semiconductor device manufactured by using LSI
technique, including ALU, register arrays & control circuits on a single chip, also known as
MPU (microprocessor unit).
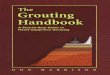
8085 ARCHITECTURE
Fig.1 Architecture of 8085
Control Unit
Generates signals within µP to carry out the instruction, which has been decoded. In reality
causes certain connections between blocks of the µP to be opened or closed, so that data goes
where it is required, and so that ALU operations occur.
Arithmetic Logic Unit
The ALU performs the actual numerical and logic operation such as ‗add‘, ‗subtract‘, ‗AND‘,
‗OR‘, etc. Uses data from memory and Accumulator to perform arithmetic operations.
Always stores result of operation in Accumulator.
Registers
The 8085/8080A-programming model includes six registers, one accumulator, and one flag
register, as shown in Figure. In addition, it has two 16-bit registers: the stack pointer and the
program counter. They are described briefly as follows.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 17
The 8085/8080A has six general-purpose registers to store 8-bit data; these are identified as
B,C,D,E,H, and L as shown in the figure. They can be combined as register pairs - BC, DE,
and HL - to perform some 16-bit operations. The programmer can use these registers to store
or copy data into the registers by using data copy instructions.
Accumulator
The accumulator is an 8-bit register that is a part of arithmetic/logic unit (ALU). This register
is used to store 8-bit data and to perform arithmetic and logical operations. The result of an
operation is stored in the accumulator. The accumulator is also identified as register A.
Flags
The ALU includes five flip-flops, which are set or reset after an operation according to data
conditions of the result in the accumulator and other registers. They are called Zero(Z), Carry
(CY), Sign (S), Parity (P), and Auxiliary Carry (AC) flags; they are listed in the Table and
their bit positions in the flag register are shown in the Figure below. The most commonly
used flags are Zero, Carry, and Sign. The microprocessor uses these flags to test data
conditions.
Program Counter (PC)
This 16-bit register deals with sequencing the execution of instructions. This register is a
memory pointer. Memory locations have 16-bit addresses, and that is why this is a 16-bit
register.
The microprocessor uses this register to sequence the execution of the instructions. The
function of the program counter is to point to the memory address from which the next byte is
to be fetched. When a byte (machine code) is being fetched, the program counter is
incremented by one to point to the next memory location
Stack Pointer (SP)
The stack pointer is also a 16-bit register used as a memory pointer. It points to a memory
location in R/W memory, called the stack. The beginning of the stack is defined by loading
16-bit address in the stack pointer.
Instruction Register/Decoder
Temporary store for the current instruction of a program. Latest instruction sent here from
memory prior to execution. Decoder then takes instruction and ‗decodes‘ or interprets the
instruction. Decoded instruction then passed to next stage.
Memory Address Register
Holds address, received from PC, of next program instruction. Feeds the address bus with
addresses of location of the program under execution.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 18
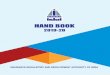
8085 Pin description
It is a 8 bit microprocessor.
It is manufactured with N-MOS technology.
It has 16-bit address bus and hence can address up to 216 = 65536 bytes (64KB) memory
locations through A0-A
15.
The first 8 lines of address bus and 8 lines of data bus are multiplexed AD0
– AD7.
Data bus is a group of 8 lines D0
– D7.
It supports external interrupt request.
A 16 bit program counter (PC)
A 16 bit stack pointer (SP)
Six 8-bit general purpose register arranged in pairs: BC, DE, HL.
It requires a signal +5V power supply and operates at 3.2 MHZ single phase clock.
It is enclosed with 40 pins DIP (Dual in line package).
Fig 2 Pin Diagram of 8085
A6 - A1s (Output 3 State)
Address Bus; The most significant 8 bits of the memory address or the 8 bits of the I/0
address,3 stated during Hold and Halt modes.
AD0 - 7 (Input / Output 3state)
Multiplexed Address/Data Bus; Lower 8 bits of the memory address (or I/0 address) appear
on the bus during the first clock cycle of a machine state. It then becomes the data bus during
the second and third clock cycles. 3 stated during Hold and Halt modes.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 19
ALE (Output)
Address Latch Enable: It occurs during the first clock cycle of a machine state and enables
the address to get latched into the on chip latch of peripherals. The falling edge of ALE is set
to guarantee setup and hold times for the address information. ALE can also be used to strobe
the status information. ALE is never 3stated.
SO, S1 (Output)
S1 S0
O O HALT
0 1 WRITE
1 0 READ
1 1 FETCH
S1 can be used as an advanced R/W status.
RD (Output 3state)
READ; indicates the selected memory or 1/0 device is to be read and that the Data Bus is
available for the data transfer.
WR (Output 3state)
WRITE; indicates the data on the Data Bus is to be written into the selected memory or 1/0
location. Data is set up at the trailing edge of WR. Hold and Halt modes have three states.
READY (Input)
If Ready is high during a read or write cycle, it indicates that the memory or peripheral is
ready to send or receive data. If Ready is low, the CPU will wait for Ready to go high before
completing the read or write cycle.
HOLD (Input)
HOLD indicates that another Master is requesting the use of the Address and Data Buses. The
CPU, upon receiving the Hold request, will relinquish the use of buses as soon as the
completion of the current machine cycle. Internal processing can continue. The processor can
regain the buses only after the Hold is removed. When the Hold is acknowledged, the
Address, Data, RD, WR, and IO/M lines are 3 states.
HLDA (Output)
HOLD ACKNOWLEDGE indicates that the CPU has received the Hold request and that it
will relinquish the buses in the next clock cycle. HLDA goes low after the Hold request is
removed. The CPU takes the buses one half clock cycle after HLDA goes low.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 20
INTR (Input)
INTERRUPT REQUEST is used as a general purpose interrupt. It is sampled only during the
next to the last clock cycle of the instruction. If it is active, the Program Counter (PC) will be
inhibited from incrementing and an INTA will be issued. During this cycle a RESTART or
CALL instruction can be inserted to jump to the interrupt service routine. The INTR is
enabled and disabled by software. It is disabled by Reset and immediately after an interrupt is
accepted.
INTA (Output)
INTERRUPT ACKNOWLEDGE is used instead of (and has the same timing as) RD during
the Instruction cycle after an INTR is accepted. It can be used to activate the 8259 Interrupt
chip or some other interrupt port.
RST 5.5
RST 6.5 - (Inputs)
RST 7.5
RESTART INTERRUPTS; These three inputs have the same timing as I NTR except they
cause an internal RESTART to be automatically inserted.
RST 7.5 ~~ Highest Priority
RST 6.5
RST 5.5 o Lowest Priority
The priority of these interrupts is ordered as shown above. These interrupts have a higher
priority than the INTR.
TRAP (Input)
Trap interrupt is a nonmaskable restart interrupt. It is recognized at the same time as INTR. It
is unaffected by any mask or Interrupt Enable. It has the highest priority of any interrupt.
RESET IN (Input)
Reset sets the Program Counter to zero and resets the Interrupt Enable and HLDA flipflops.
None of the other flags or registers (except the instruction register) are affected The CPU is
held in the reset condition as long as Reset is applied.
RESET OUT (Output)
Indicates CPlJ is being reset. Can be used as a system RESET. The signal is synchronized to
the processor clock.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 21
X1, X2 (Input)
Crystal or R/C network connections to set the internal clock generator X1 can also be an
external clock input instead of a crystal. The input frequency is divided by 2 to give the
internal operating frequency.
CLK (Output)
Clock Output for use as a system clock when a crystal or R/ C network is used as an input to
the CPU. The period of CLK is twice the X1, X2 input period.
IO/M (Output)
IO/M indicates whether the Read/Write is to memory or l/O Tristated during Hold and
Halt modes.
SID (Input)
Serial input data line the data on this line is loaded into accumulator bit 7 whenever a RIM
instruction is executed.
SOD (output)
Serial output data line. The output SOD is set or reset as specified by the SIM instruction.
Registers
Accumulator or A register is an 8-bit register used for arithmetic, logic, I/O and load/store
operations.
Flag Register has five 1-bit flags.
Sign - set if the most significant bit of the result is set.
Zero - set if the result is zero.
Auxiliary carry - set if there was a carry out from bit 3 to bit 4 of the result.
Parity - set if the parity (the number of set bits in the result) is even.
Carry - set if there was a carry during addition, or borrow during
subtraction/comparison/rotation.
General Registers
8-bit B and 8-bit C registers can be used as one 16-bit BC register pair. When used as a
pair the C register contains low-order byte. Some instructions may use BC register as a data
pointer.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 22
8-bit D and 8-bit E registers can be used as one 16-bit DE register pair. When used as a
pair the E register contains low-order byte. Some instructions may use DE register as a data
pointer.
8-bit H and 8-bit L registers can be used as one 16-bit HL register pair. When used as a
pair the L register contains low-order byte. HL register usually contains a data pointer used to
reference memory addresses.
Stack pointer is a 16 bit register. This register is always decremented/incremented by 2
during push and pop.
Program counter is a 16-bit register.
Instruction Set
8085 instruction set consists of the following instructions:
Data moving instructions.
Arithmetic - add, subtract, increment and decrement.
Logic - AND, OR, XOR and rotate.
Control transfer - conditional, unconditional, call subroutine, return from subroutine and
restarts.
Input/output instructions.
Other - setting/clearing flag bits, enabling/disabling interrupts, stack operations, etc.
Addressing mode
The instructions MOV B, A or MVI A, 82H are to copy data from a source into a destination.
In these instructions the source can be a register, an input port, or an 8-bit number (00H to
FFH). Similarly, a destination can be a register or an output port. The sources and destination
are operands. The various formats for specifying operands are called the ADDRESSING
MODES.
For 8085, they are:
Immediate addressing.
Register addressing.
Direct addressing.
Indirect addressing.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 23
Immediate addressing
Data is present in the instruction. Load the immediate data to the destination provided.
Example: MVI R , data
Register addressing
Data is provided through the registers. E.g.: MOV Rd, Rs
Direct addressing
Used to accept data from outside devices to store in the accumulator or send the data stored in
the accumulator to the outside device. Accept the data from the port 00H and store them into
the accumulator or Send the data from the accumulator to the port 01H. (E.g) IN 00H or OUT
01H
Indirect Addressing
This means that the Effective Address is calculated by the processor. And the content of the
address (and the one following) is used to form a second address. The second address is
where the data is stored. Note that this requires several memory accesses; two accesses to
retrieve the 16-bit address and a further access (or accesses) to retrieve the data this is to be
loaded into the register.
8086 Microprocessor
It is a 16-bit μp.
8086 has a 20 bit address bus can access up to 220 memory locations (1 MB).
It can support up to 64K I/O ports.
It provides 14, 16 -bit registers.
It has multiplexed address and data bus AD0- AD15 and A16 – A19.
It requires single phase clock with 33% duty cycle to provide internal timing.
8086 is designed to operate in two modes, Minimum and Maximum.
It can prefetches up to 6 instruction bytes from memory and queues them in order to speed
up instruction execution.
It requires +5V power supply.
A 40 pin dual in line package
Minimum and Maximum Modes:
The minimum mode is selected by applying logic 1 to the MN / MX input pin. This is a
single microprocessor configuration.
The maximum mode is selected by applying logic 0 to the MN / MXinput pin. This is a
multi micro processors configuration.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 24
Local Bus Control Signal – Request / Grant Signals: In a maximum mode configuration,
the minimum mode HOLD, HLDA interface is also changed. These two are replaced by
request/grant lines RQ/ GT0 and RQ/ GT1, respectively. They provide a prioritized bus
access mechanism for accessing the local bus.
Internal Registers of 8086
The 8086 has four groups of the user accessible internal registers. They are the instruction
pointer, four data registers, four pointer and index register, four segment registers.
The 8086 has a total of fourteen 16-bit registers including a 16 bit register called the status
register, with 9 of bits implemented for status and control flags.
Most of the registers contain data/instruction offsets within 64 KB memory segment.
There are four different 64 KB segments for instructions, stack, data and extra data. To
specify where in 1 MB of processor memory these 4 segments are located the processor uses
four segment registers:
Code segment (CS) is a 16-bit register containing address of 64 KB segment with
processor instructions. The processor uses CS segment for all accesses to instructions
referenced by instruction pointer (IP) register. CS register cannot be changed directly. The
CS register is automatically updated during far jump, far call and far return instructions.
Stack segment (SS) is a 16-bit register containing address of 64KB segment with program
stack. By default, the processor assumes that all data referenced by the stack pointer (SP) and
base pointer (BP) registers is located in the stack segment. SS register can be changed
directly using POP instruction.
Data segment (DS) is a 16-bit register containing address of 64KB segment with program
data. By default, the processor assumes that all data referenced by general registers (AX, BX,

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 25
CX, DX) and index register (SI, DI) is located in the data segment. DS register can be
changed directly using POP and LDS instructions.
Accumulator register consists of two 8-bit registers AL and AH, which can be combined
together and used as a 16-bit register AX. AL in this case contains the low-order byte of the
word, and AH contains the high-order byte. Accumulator can be used for I/O operations and
string manipulation.
Base register consists of two 8-bit registers BL and BH, which can be combined together
and used as a 16-bit register BX. BL in this case contains the low-order byte of the word, and
BH contains the high-order byte. BX register usually contains a data pointer used for based,
based indexed or register indirect addressing.
Count register consists of two 8-bit registers CL and CH, which can be combined together
and used as a 16-bit register CX. When combined, CL register contains the low-order byte of
the word, and CH contains the high-order byte. Count register can be used in Loop,
shift/rotate instructions and as a counter in string manipulation,.
Data register consists of two 8-bit registers DL and DH, which can be combined together
and used as a 16-bit register DX. When combined, DL register contains the low-order byte of
the word, and DH contains the high-order byte. Data register can be used as a port number in
I/O operations. In integer 32-bit multiply and divide instruction the DX register contains
high-order word of the initial or resulting number.
The following registers are both general and index registers:
Stack Pointer (SP) is a 16-bit register pointing to program stack.
Base Pointer (BP) is a 16-bit register pointing to data in stack segment. BP register is
usually used for based, based indexed or register indirect addressing.
Source Index (SI) is a 16-bit register. SI is used for indexed, based indexed and register
indirect addressing, as well as a source data address in string manipulation instructions.
Destination Index (DI) is a 16-bit register. DI is used for indexed, based indexed and
register indirect addressing, as well as a destination data address in string manipulation
instructions.
Other registers:
Instruction Pointer (IP) is a 16-bit register.
A flag is a 16-bit register containing 9 one bit flags.
Overflow Flag (OF) - set if the result is too large positive number, or is too small negative
number to fit into destination operand.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 26
Direction Flag (DF) - if set then string manipulation instructions will auto-decrement
index registers. If cleared then the index registers will be auto-incremented.
Interrupt-enable Flag (IF) - setting this bit enables maskable interrupts.
Single-step Flag (TF) - if set then single-step interrupt will occur after the next
instruction.
Sign Flag (SF) - set if the most significant bit of the result is set.
Zero Flag (ZF) - set if the result is zero.
Auxiliary carry Flag (AF) - set if there was a carry from or borrow to bits 0-3 in the AL
register.
Parity Flag (PF) - set if parity (the number of "1" bits) in the low-order byte of the result
is even.
Carry Flag (CF) - set if there was a carry from or borrow to the most significant bit
during last result calculation.
Addressing Modes
Implied - the data value/data address is implicitly associated with the instruction.
Register - references the data in a register or in a register pair.
Immediate - the data is provided in the instruction.
Direct - the instruction operand specifies the memory address where data is located
Register indirect - instruction specifies a register containing an address, where data is
located. This addressing mode works with SI, DI, BX and BP registers.
Based:- 8-bit or 16-bit instruction operand is added to the contents of a base register (BX
or BP), the resulting value is a pointer to location where data resides.
Indexed:- 8-bit or 16-bit instruction operand is added to the contents of an index register
(SI or DI), the resulting value is a pointer to location where data resides
Based Indexed:- the contents of a base register (BX or BP) is added to the contents of an
index register (SI or DI), the resulting value is a pointer to location where data resides.
Based Indexed with displacement:- 8-bit or 16-bit instruction operand is added to the
contents of a base register (BX or BP) and index register (SI or DI), the resulting value is a
pointer to location where data resides.
Memory Program, data and stack memories occupy the same memory space. As the most
of the processor instructions use 16-bit pointers the processor can effectively address only 64
KB of memory.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 27
To access memory outside of 64 KB the CPU uses special segment registers to specify
where the code, stack and data 64 KB segments are positioned within 1 MB of memory (see
the "Registers" section below).
16-bit pointers and data are stored as: address: low-order byte address+1: high-order byte
Program memory - program can be located anywhere in memory. Jump and call
instructions can be used for short jumps within currently selected 64 KB code segment, as
well as for far jumps anywhere within 1 MB of memory.
All conditional jump instructions can be used to jump within approximately +127 to -127
bytes from current instruction.
Data memory - the processor can access data in any one out of 4 available segments,
which limits the size of accessible memory to 256 KB (if all four segments point to different
64 KB blocks).
Accessing data from the Data, Code, Stack or Extra segments can be usually done by
prefixing instructions with the DS:, CS:, SS: or ES: (some registers and instructions by
default may use the ES or SS segments instead of DS segment).
Stack memory can be placed anywhere in memory. The stack can be located at odd
memory addresses, but it is not recommended for performance reasons (see "Data Memory"
above).
Interrupts
The processor has the following interrupts:
INTR is a maskable hardware interrupt. The interrupt can be enabled/disabled using
STI/CLI instructions or using more complicated method of updating the FLAGS register with
the help of the POPF instruction.
When an interrupt occurs, the processor stores FLAGS register into stack, disables further
interrupts, fetches from the bus one byte representing interrupt type, and jumps to interrupt
processing routine address of which is stored in location 4 * <interrupt type>. Interrupt
processing routine should return with the IRET instruction.
NMI is a non-maskable interrupt. Interrupt is processed in the same way as the INTR
interrupt. Interrupt type of the NMI is 2, i.e. the address of the NMI processing routine is
stored in location 0008h. This interrupt has higher priority then the maskable interrupt.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 28
MICROCONTROLLER
4K bytes internal ROM
128 bytes internal RAM
Four 8-bit I/O ports (P0 - P3).
Two 16-bit timers/counters
One serial interface
On-ChipMemory
Internal RAM
SPECIAL FUNCTION REGISTER:
P0 (PORT 0, ADDRESS 80H, BIT-ADDRESSABLE): This is input/output port 0. Each bit
of this SFR corresponds to one of the pins on the microcontroller. For example, bit 0 of port 0
is pin P0.0, bit 7 is pin P0.7. Writing a value of 1 to a bit of this SFR will send a high level on
the corresponding I/O pin whereas a value of 0 will bring it to a low level.
SP (stack pointer, address 81h): This is the stack pointer of the microcontroller. This SFR
indicates where the next value to be taken from the stack will be read from in Internal RAM.
If you push a value onto the stack, the value will be written to the address of SP + 1. That is
to say, if SP holds the value 07h, a PUSH instruction will push the value onto the stack at
address 08h. This SFR is modified by all instructions which modify the stack, such as PUSH,
POP, LCALL, RET, RETI, and whenever interrupts are provoked by the microcontroller
DPL/DPH (DATA POINTER LOW/HIGH, ADDRESSES 82H/83H): The SFRs DPL and
DPH work together to represent a 16-bit value called the Data Pointer. The data pointer is
used in operations regarding external RAM and some instructions involving code memory.
Since it is an unsigned two-byte integer value, it can represent values from 0000h to FFFFh
(0 through 65,535 decimal).

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 29
PCON (Power Control, Addresses 87h): The Power Control SFR is used to control the
8051's power control modes. Certain operation modes of the 8051 allow the 8051 to go into a
type of "sleep" mode which requires much less power. These modes of operation are
controlled through PCON. Additionally, one of the bits in PCON is used to double the
effective baud rate of the 8051's serial port.
TCON (Timer Control, Addresses 88h, Bit-Addressable): The Timer Control SFR is used
to configure and modify the way in which the 8051's two timers operate. This SFR controls
whether each of the two timers is running or stopped and contains a flag to indicate that each
timer has overflowed. Additionally, some non-timer related bits are located in the TCON
SFR. These bits are used to configure the way in which the external interrupts are activated
and also contain the external interrupt flags which are set when an external interrupt has
occurred.
TMOD (Timer Mode, Addresses 89h): The Timer Mode SFR is used to configure the mode
of operation of each of the two timers. Using this SFR your program may configure each
timer to be a 16-bit timer, an 8-bit autoreload timer, a 13-bit timer, or two separate timers.
Additionally, you may configure the timers to only count when an external pin is activated or
to count "events" that are indicated on an external pin.
TL0/TH0 (Timer 0 Low/High, Addresses 8Ah/8Ch): These two SFRs, taken together,
represent timer 0. Their exact behaviour depends on how the timer is configured in the
TMOD SFR; however, these timers always count up. What is configurable is how and when
they increment in value.
TL1/TH1 (Timer 1 Low/High, Addresses 8Bh/8Dh): These two SFRs, taken together,
represent timer 1. Their exact behaviour depends on how the timer is configured in the
TMOD SFR; however, these timers always count up. What is configurable is how and when
they increment in value.
P1 (Port 1, Address 90h, Bit-Addressable): This is input/output port 1. Each bit of this SFR
corresponds to one of the pins on the microcontroller. For example, bit 0 of port 1 is pin P1.0,
bit 7 is pin P1.7. Writing a value of 1 to a bit of this SFR will send a high level on the
corresponding I/O pin whereas a value of 0 will bring it to a low level.
SCON (Serial Control, Addresses 98h, Bit-Addressable): The Serial Control SFR is used
to configure the behaviour of the 8051's on-board serial port. This SFR controls the baud rate
of the serial port, whether the serial port is activated to receive data, and also contains flags
that are set when a byte is successfully sent or received.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 30
SBUF (Serial Control, Addresses 99h): The Serial Buffer SFR is used to send and receive
data via the on-board serial port. Any value written to SBUF will be sent out the serial port's
TXD pin. Likewise, any value which the 8051 receives via the serial port's RXD pin will be
delivered to the user program via SBUF. In other words, SBUF serves as the output port
when written to and as an input port when read from.
P2 (Port 2, Address A0h, Bit-Addressable): This is input/output port 2. Each bit of this
SFR corresponds to one of the pins on the microcontroller. For example, bit 0 of port 2 is pin
P2.0, bit 7 is pin P2.7. Writing a value of 1 to a bit of this SFR will send a high level on the
corresponding I/O pin whereas a value of 0 will bring it to a low level.
IE (Interrupt Enable, Addresses A8h): The Interrupt Enable SFR is used to enable and
disable specific interrupts. The low 7 bits of the SFR are used to enable/disable the specific
interrupts, where as the highest bit is used to enable or disable ALL interrupts. Thus, if the
high bit of IE is 0 all interrupts are disabled regardless of whether an individual interrupt is
enabled by setting a lower bit.
P3 (Port 3, Address B0h, Bit-Addressable): This is input/output port 3. Each bit of this
SFR corresponds to one of the pins on the microcontroller. For example, bit 0 of port 3 is pin
P3.0, bit 7 is pin P3.7. Writing a value of 1 to a bit of this SFR will send a high level on the
corresponding I/O pin whereas a value of 0 will bring it to a low level.
IP (Interrupt Priority, Addresses B8h, Bit-Addressable): The Interrupt Priority SFR is
used to specify the relative priority of each interrupt. On the 8051, an interrupt may either be
of low (0) priority or high (1) priority. An interrupt may only interrupt interrupts of lower
priority. For example, if we configure the 8051 so that all interrupts are of low priority except
the serial interrupt, the serial interrupt will always be able to interrupt the system, even if
another interrupt is currently executing. However, if a serial interrupt is executing no other
interrupt will be able to interrupt the serial interrupt routine since the serial interrupt routine
has the highest priority.
PSW (Program Status Word, Addresses D0h, Bit-Addressable): The Program Status
Word is used to store a number of important bits that are set and cleared by 8051 instructions.
The PSW SFR contains the carry flag, the auxiliary carry flag, the overflow flag, and the
parity flag. Additionally, the PSW register contains the register bank select flags which are
used to select which of the "R" register banks are currently selected.
ACC (Accumulator, Addresses E0h, Bit-Addressable): The Accumulator is one of the
most-used SFRs on the 8051 since it is involved in so many instructions. The Accumulator
resides as an SFR at E0h, which means the instruction MOV A,#20h is really the same as

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 31
MOV E0h,#20h. However, it is a good idea to use the first method since it only requires two
bytes whereas the second option requires three bytes.
B (B Register, Addresses F0h, Bit-Addressable): The "B" register is used in two
instructions: the multiply and divide operations. The B register is also commonly used by
programmers as an auxiliary register to temporarily store values

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 32
OBJECTIVE TYPE
QUESTION

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 33
1. Which interrupt has the highest priority?
a. INTR
b. TRAP
c. RST6.5
d. RST 7.5
2. In 8085 name the 16 bit registers?
a. Stack pointer
b. Program counter
c. Both a & b
d. ACC
3. Which of the following is hardware interrupts?
a. RST5.5, RST6.5, RST7.5
b. INTR, TRAP
c. Both a & b
d. RST 4.5
4. What is the RST for the TRAP?
a. RST5.5
b. RST4.5
c. RST4
d. RST 7.5
5. What are level Triggering interrupts?
a. INTR&TRAP
b. RST6.5&RST5.5
c. RST7.5&RST6.5
d. RST 4.5
6. Which interrupt is not level sensitive in 8085?
a. RST6.5 is a raising edge-trigging interrupt.
b. RST7.5 is a raising edge-trigging interrupt.
c. Both a & b.
d. RST 5.5 is a raising edge-trigging interrupt.
7. What are software interrupts?
a. RST 0 – 7
b. RST 5.5 - 7.5
c. INTR
d. TRAP
8. Which stack is used in 8085?
a. FIFO
b. LIFO
c. FILO
d. LILO

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 34
9. Why 8085 processor is called an 8 bit processor?
a. Because 8085 processor has 8 bit ALU.
b. Because 8085 processor has 8 bit data bus.
c. Both a & b.
d. 8085 processor has 16 bit ALU
10. What is SIM?
a. Select Interrupt Mask
b. Sorting Interrupt Mask
c. Set Interrupt Mask.
11. RIM is used to check whether, ______
a. The write operation is done or not
b. The interrupt is Masked or not
c. Both a &b
d. The read operation is done
12. What is meant by Maskable interrupts?
a. An interrupt which can never be turned off.
b. An interrupt that can be turned off by the programmer.
c. None
d. RST 5.5
13. In 8086, Example for Non maskable interrupts are
a. Trap
b. RST6.5
c. INTR
d. RST 5.5
14. What does microprocessor speed depends on?
a. Clock
b. Data bus width
c. Address bus width
d. Either data bus nor address bus
15. Can ROM be used as stack?
a. Yes
b. No
16. Which processor structure is pipelined?
a. all x80 processors
b. all x85 processors
c. all x86 processors
d. all x82 processors

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 35
17. Address line for RST3 is?
a. 0020H
b. 0028H
c. 0018H
d. 0010H
18. In 8086 the overflow flag is set when
a. The sum is more than 16 bits
b. Signed numbers go out of their range after an arithmetic operation
c. Carry and sign flags are set
d. During subtraction
19. The advantage of memory mapped I/O over I/O mapped I/O is,
a. Faster
b. Many instructions supporting memory mapped I/O
c. Require a bigger address decoder
d. All the above
20. BHE of 8086 microprocessor signal is used to interface the
a. Even bank memory
b. Odd bank memory
c. I/O
d. DMA
21. In 8086 microprocessor the following has the highest priority among all type interrupts.
a. NMI
b. DIV 0
c. TYPE 255
d. OVER FLOW
22. In 8086 microprocessor one of the following statements is not true.
a. Coprocessor is interfaced in MAX mode
b. Coprocessor is interfaced in MIN mode
c. I/O can be interfaced in MAX / MIN mode
d. Supports pipelining
23. 8088 microprocessor differs with 8086 microprocessor in
a. Data width on the output
b. Address capability
c. Support of coprocessor
d. Support of MAX / MIN mode
24. Address line for TRAP is?
a. 0023H
b. 0024H
c. 0033H
d. 0034H

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 36
25. In which T-state does the CPU sends the address to memory or I/O and the ALE signal
for de-multiplexing
a. T1
b. T2
c. T3
d. T4
26. In a DMA write operation the data is transferred
a. from I/O to memory.
b. from memory to I/O.
c. from memory to memory.
d. from I/O to I/O.
27. A certain SRAM has CS = 0 , WE = 0 and OE = 1. In which of the following modes this
SRAM is operating
a. Read
b. Write
c. Stand by
d. None of the above
28. Which of the following is true with respect to EEPROM?
a. contents can be erased byte wise only.
b. contents of full memory can be erased together.
c. contents can be erased using ultra violet rays
d. contents cannot be erased
29. What will be the contents of register AL after the following has been executed
MOV BL, 8C
MOV AL, 7E
ADD AL, BL
a. 0A and carry flag is set
b. 0A and carry flag is reset
c. 6A and carry flag is set
d. 6A and carry flag is reset
29. A Bus cycle is equal to how many clocking periods
a. Two
b. Three
c. Four
d. Six
30. In the instruction FADD, F stands for
a. Far.
b. Floppy.
c. Floating.
d. File.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 37
31. The Pentium microprocessor has______execution units.
a. 1
b. 2
c. 3
d. 4
32. Which of the following statement is true?
a. The group of machine cycle is called a state.
b. A machine cycle consists of one or more instruction cycle.
c. An instruction cycle is made up of machine cycles and a machine cycle is
d. made up of number of states.
e. None of the above
33. 8251 is a
a. UART
b. USART
c. Programmable Interrupt controller
d. Programmable interval timer/counter
34. 8088 microprocessor has
a. 16 bit data bus
b. 4 byte pre-fetch queue
c. 6 byte pre-fetch queue
d. 16 bit address bus
35. The memory data bus width in Pentium is
a. 16 bit
b. 32 bit
c. 64 bit
d. None of these
36. Which microprocessor pins are used to request and acknowledge a DMA transfer?
a. reset and ready
b. ready and wait
c. HOLD and HLDA
d. None of these
37. Which of the following statement is false?
a. RTOS performs tasks in predictable amount of time
b. Windows 98 is RTOS
c. Interrupts are used to develop RTOS
d. Kernel is the one of component of any OS

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 38
38. The flash memory is programmed in the system by 12 V programming pulse.
a. TRUE
b. FALSE
39. The no. of address lines required to address a memory of size 32 K is
a. 15 lines
b. 16 lines
c. 18 lines
d. 14 lines
40. Data rate available for use on USB is
a. 12 Mbits per second
b. 1.5 Mbits per second
c. Both (a) and (b)
d. No restriction
41. In 80186, the timer which connects to the system clock is
a. timer 0
b. timer 1
c. timer 2
d. Any one can be connected
42. The 8051 microcontroller is of ___pin package as a ______ processor.
a. 30, 1byte
b. 20, 1 byte
c. 40, 8 bit
d. 40, 8 byte
43. The SP is of ___ wide register. And this may be defined anywhere in the ______.
a. 8 byte, on-chip 128 byte RAM.
b. 8 bit, on chip 256 byte RAM.
c. 16 bit, on-chip 128 byte ROM
d. 8 bit, on chip 128 byte RAM.
44. After reset, SP register is initialized to address________.
a) 8H
b) 9H
c) 7H
d) 6H
45. What is the address range of SFR Register bank?
a) 00H-77H
b) 40H-80H
c) 80H-7FH
d) 80H-FFH

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 39
46. Which pin of port 3 is has an alternative function as write control signal for external data
memory?
a) P3.8
b) P3.3
c) P3.6
d) P3.1
47. What is the Address (SFR) for TCON, SCON, SBUF, PCON and PSW respectively?
a) 88H, 98H, 99H, 87H, 0D0H.
b) 98H, 99H, 87H, 88H, 0D0H
c) 0D0H, 87H, 88H, 99H, 98H
d) 87H, 88H, 0D0H, 98H, 99H
48. Match the following:
1) TCON i) contains status information
2) SBUF ii) timer / counter control register.
3) TMOD iii) idle bit, power down bit
4) PSW iv) serial data buffer for Tx and Rx.
5) PCON v) timer/ counter modes of operation.
a) 1->ii, 2->iv, 3->v, 4->i, 5->iii.
b) 1->i, 2->v, 3->iv, 4->iii, 5->ii.
c) 1->v, 2->iii, 3->ii, 4->iv, 5->i.
d) 1->iii, 2->ii, 3->i, 4->v, 5->iv.
49. Which of the following is of bit operations?
i) SP ii) P2 iii) TMOD iv) SBUF v) IP
a) ii, v only
b) ii, iv, v only
c) i, v only
d) iii, ii only
50. Serial port interrupt is generated, if ____ bits are set
a) IE
b) RI, IE
c) IP, TI
d) RI, TI
51.Which of the following instruction perform as of indirect RAM to accumulator?
a) MOV A, Rn
b) MOV @Ri, A
c) MOV A, @Ri
d) MOV Rn, A

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 40
52. ACALL instruction allows specifying ______address in the instruction and calling
subroutine within ______ program memory block.
a) 2byte, 3K
b) 11bit, 2K
c) 9bit, 2K
d) 1byte, 3K
53. Which of the following instruction perform the move accumulator to external RAM of
16bit address?
a) MOV @ DPTR, A
b) MOVX @ Ri, A
c) MOV A, @ Ri
d) MOVX @ DPTR, A
54. Which of the following instruction perform jump indirect relative to DPTR ?
a) JMP A+DPTR
b) JMP DPTR
c) JMP @A+DPTR
d) SJMP A+DPTR
55. Which of the following instruction is wrong?
a) INC DPTR
b) MOV @DPTR, A
c) MOV A, @A+DPTR
d) DEC DPTR
56. Which of the following instruction is of logical instructions?
i) CPL A ii) JC rel iii) DA A iv) ANL A, Rn v) RR A vi) CPL bit
a) i, v
b) v, iii, I
c) iv, ii
d) v, iii, ii
57. What instruction performs Compare immediate to indirect and jump if not equal.
a) CJNE A, #data, rel
b) CJNE Rn, #data, rel
c) CJNE @ Ri, #data, rel
d) CJNE A, data, rel
58. What is the Result of RR A instruction if accumulator contains 1000 0000.
a) 0000 0001
b) 0000 0000
c) 0100 0000
d) 0000 0010

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 41
59. What is the location value of R0 and the content at that place?
MOV R0, 45H
INC R0
MOV @R0, #30
a) 45H, 4F
b) 50H, 30H
c) 30H, 50H
d) 50H, 45H
60. Which of the following is of type memory initialized Directive?
i) DS ii) SET iii) DW iv) DBIT
a) i, iii
b) ii
c) iii
d) iv, ii
61. Which of the following is not a program linking directive
i) EXTRN ii) SEGMENT iii) NAME iv) PUBLIC
v) USING
a) iv, v
b) ii, iii
c) i, iii
d) ii, v
62. SP of 8051 is of ___ wide and it is loaded with the default value of ___ after reset.
a) 2 byte, 08H
b) 8 bit, 07H
c) 1 byte, 09H
d) 8 bit, 06H
63. Which of the following instruction is used to set bit port directly?
a) SET P1.0
b) MOV P1.0, bit
c) SETB P1.0
d) JB P1.0, bit
64. MOV A, #56H
MOV R1, #50H
MOV 50H, # 45H
XCHD A, @R1
What is the result at A, R1?
a) 56H, 45H
b) 45H, 50H
c) 50H, 56H
d) 45H, 56H
65. The internal RAM memory of the 8051 is;
a) 32 bytes
b) 64 bytes
c) 128 bytes
d) 256 bytes

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 42
66. Data transfer from I/O to external data memory can only be done with the MOVX
command.
a. TRUE b.False
67. The contents of different registers are given below. Form Effective addresses for
different addressing modes are as follow : Offset = 5000H
[AX]- 1000H, [BX]- 2000H, [SI]- 3000H, [DI]- 4000H, [BP]- 5000H,
[SP]- 6000H, [CS]- 0000H, [DS]- 1000H, [SS]- 2000H, [IP]- 7000H.
I. MOV AX, [5000H]
a) 5000H b) 15000H c) 10500H
68. The conditional branch instruction JNS performs the operations when if __
a) ZF =0 b) SF=0 c) PF=0 d) CF=0
69. Vector address of TRAP
a) 24H b) 36H c) 24 d) 18H
70. SOD pin can drive a D flip-flop?
a) SOD cannot drive any flip-flops.
b) SOD cannot drive D flip-flop, but can drive any other flop-flops.
c) Yes, SOD can drive D flop-flop.
d) No, SOD cannot drive any other flop-flops except D flop-flop.
71. IDIV and DIV instructions perform the same operations for?
a) Unsigned number
b) b) Signed number
c) c) Signed number & Unsigned number
d) d) none of above.
72. What is the output of the following code
AL=88 BCD, CL=49 BCD
ADD AL, CL
DAA
a) D7, CF=1
b) 37, CF=1
c) 73, CF=1
d) 7D, CF=1

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 43
73. What is the output of the following code
AL= 49 BCD, BH= 72 BCD
SUB AL, BH
DAS
a) AL=D7, CF=1.
b) AL=7D, CF=1.
c) AL=77, CF=1
d) none of them.
74.What is the output of the following code
AL= -28 decimal, BL=59 decimal
IMUL BL
AX=? , MSB=?
a) AX= F98CH, MSB=1.
b) AX= 1652, MSB=1.
c) BX F9C8H, MSB=1.
d) BX= 1652, MSB=1.
75. What is the output of the following code
AL= 00110100 BL= 00111000
ADD AL, BL
AAA
a) AL = 6CH
b) 12H
c) 12
d) C6H
76. What is the output of the following code
AL=00110101 BL= 39H
SUB AL, BL AAS
a) AL= 00000100, CF=1
b) BL=00000100, CF=0
c) AL=11111100 CF=1
d) BL= 00000100, CF=1
77. What is the output of the following code
CF =0, BH = 179
RCL BH, 1
a) CF=0, OF= 1, BH= 01100101
b) CF=1, OF=1, BH=01100110
c) CF=1, OF =0, BH= 01001101
d) CF=0, OF=0, BH=00101100

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 44
78. What is the output of the following code
SI=10010011 10101101, CF=0
SHR SI, 1
a) 37805, CF=1, OF=1
b) 18902, CF=1, OF=1
c) 19820, CF=1, OF=1
d) 53708, CF=1, OF=1
79. What is the output of the following code
BX=23763 CL=8
ROL BX, CL
a) 0101110011010011, CF=0
b) 1101001101011100, CF=0
c) 0110100010011101, CF=1
d) 1011100110001100, CF=1
80. What is the output of the following code PUSH AL
a) Decrement SP by 2 & push a word to stack
b) Increment SP by 2 & push a word to stack
c) Decrement SP by 2 & push a AL to stack
d) Illegal
81. What is the output of the following code
AX = 37D7H, BH = 151 decimal
DIV BH
a) AL = 65H, AH= 94 decimal
b) AL= 5EH, AH= 101 decimal
c) AH= E5H, AL= 5EH
d) AL= 56H, AH= 5EH
82. In 8086 microprocessor one of the following instructions is executed before an arithmetic
operation
a) AAM
b) AAD
c) DAS
d) DAA
83.An alternate function of port pin P3.4 in the 8051 is:
a) Timer0
b) Timer 1
c) Interrupt 0
d) Interrupt 1

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 45
84. The I/O ports that are used as address and data for external memory are:
a) Ports 1 and 2
b) Ports 1and 3
c) Ports 0and 2
d) Ports 0 and 3
85. Which of the following statements will add the accumulator and register 3?
a.ADD @R3, @A
b.ADD@A,R3
c.ADD R3,AADD A,R3
86. The special function registers can be referred to by their hex addresses or by their register names.
a. True b. false
87. Which of the following commands will copy the contents of RAM whose address is in register 0 to port 1?
a. MOV @ P1, R0
b. MOV @ R0, P1
c. MOV P1, @ R0
d. MOV P1, R0
88. Which of the following commands will copy the contents of location 4H to the accumulator?
a. MOV A, 04H
b. MOV A, L4
c. MOV L4, A
d. MOV 04H, A
89. Which of the following instructions will load the value 35H into the high byte of timer 0?
a. MOV TH0, #35H
b. MOV TH0, 35H
c. MOV T0, #35H
d. MOV T0, 35H
90. Bit-addressable memory locations are:
a. 0000 to FFFFH
b. 000 to FFFH
c. 00 to FFH
d. 0 to FH
91.T he I/O port that does not have a dual-purpose role is:
a. port 0
b. port 1
c. port 2
d. port3
92. How many buses are connected as part of the 8085A microprocessor?
a. 2
b. 3
c. 5
d. 8

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 46
93. The technique of assigning a memory address to each I/O device in the computer system is called:
a. memory-mapped I/O
b. ported I/O
c. dedicated I/O
d. wired I/O
94.PROMs are used to store
a. Bulk information
b. sequential information
c. information to be accessed rarely
d. relatively permanent information
95. In a microprocessor, the register which holds the address of the next instruction to be fetched is.
a. accumulator
b. Program counter
c. stack pointer
d. instructor register
96.the contents of accumulator after the execution of following instruction will be
MVI A,A7H
ORA A
RLC
a. A.CF H
b. B.4F H
c. C.4E H
d. CE H
97.the instruction DAA
a. converts binary to BCD
b. converts BCD to binary
c. decrements accumulator
d. d .add contents of accumulator to accumulator
98.each cell of a station Random access memory contains
a. 6 MOS transistor
b. 4 MOS transistor and 2 capacitors
c. two 2-input NORs and one X-Nor gate
d. XOR gates and shift register
99.In a 8085 microprocessor system with memory mapped I/O
a. I/O devices have 8-bit address
b. I/O devices are accessed using N and out instructions
c. there can be a maximum of 256 inputs devices and 256 output devices
d. Arithmetic and logic operations can be directly performed with the I/O data.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 47
100.consider the execution of the following instruction by 8085
MVI H,01FFH
SHLD 2050H
After execution the contents of memory location 2050h,2051h and register H,L will be respectively
a. 01H,FFH,FFH,01H
b. FFH,01H,FFH,01H
c. FFH,01H,01H,FFH
d. 01H,FFH,01H,FFH

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 48
Answer
1.C 2.C 3.C 4.B 5.B
6.B 7.A 8.B 9.A 10.C
11.B 12.B 13.A 14.C 15.B
16.C 17.C 18.B 19.D 20.B
21.A 22.B 23.A 24.B 25.A
26.A 27.B 28.C 29.C 30.C
31.C 32.B 33.B 34.D 35.C
36.C 37.B 38.A 39.A 40.C
41.C 42.C 43.D 44.C 45.D
46.C 47.A 48.A 49.A 50.D
51.C 52.B 53.D 54.C 55.B
56.A 57.C 58.C 59.B 60.C
61.D 62.B 63.C 64.D 65.C
66.A 67.B 68.B 69.A 70.C
71.B 72.B 73.C 74.A 75.C
76.A 77.B 78.B 79.B 80.D
81.B 82.B 83.A 84.C 85.D
86.C 87.A 88.A 89.A 90.B
91.B 92.B 93.A 94.C 95.B
96.B 97.A 98.A 99.D 100.C

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 49
INTERVIEW QUESTIONS

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 50
1.What are the various registers in 8085? - Accumulator register, Temporary register,
Instruction register, Stack Pointer, Program Counter are the various registers in 8085 .
2.In 8085 name the 16 bit registers? - Stack pointer and Program counter all have 16 bits.
3.What are the various flags used in 8085? - Sign flag, Zero flag, Auxillary flag, Parity flag,
Carry flag.
4.What is Stack Pointer? - Stack pointer is a special purpose 16-bit register in the
Microprocessor, which holds the address of the top of the stack.
5.What is Program counter? - Program counter holds the address of either the first byte of the
next instruction to be fetched for execution or the address of the next byte of a multi byte
instruction, which has not been completely fetched. In both the cases it gets incremented
automatically one by one as the instruction bytes get fetched. Also Program register keeps the
address of the next instruction.
6.Which Stack is used in 8085? - LIFO (Last In First Out) stack is used in 8085.In this type
of Stack the last stored information can be retrieved first.
7.What happens when HLT instruction is executed in processor? - The Micro Processor
enters into Halt-State and the buses are tri-stated.
8.What is meant by a bus? - A bus is a group of conducting lines that carriers data, address, &
control signals.
9.What is Tri-state logic? - Three Logic Levels are used and they are High, Low, High
impedance state. The high and low are normal logic levels & high impedance state is
electrical open circuit conditions. Tri-state logic has a third line called enable line.
10. Give an example of one address microprocessor? - 8085 is a one address microprocessor.
11. In what way interrupts are classified in 8085? - In 8085 the interrupts are classified as
Hardware and Software interrupts.
12. What are Hardware interrupts? - TRAP, RST7.5, RST6.5, RST5.5, INTR.
13. What are Software interrupts? - RST0, RST1, RST2, RST3, RST4, RST5, RST6, RST7.
14. Which interrupt has the highest priority? - TRAP has the highest priority.
15. Name 5 different addressing modes? - Immediate, Direct, Register, Register indirect,
Implied addressing modes.
16. How many interrupts are there in 8085? - There are 12 interrupts in 8085.
17. What is clock frequency for 8085? - 3 MHz is the maximum clock frequency for 8085.
18. What is the RST for the TRAP? - RST 4.5 is called as TRAP.
19. In 8085 which is called as High order / Low order Register? - Flag is called as Low order
register & Accumulator is called as High order Register.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 51
20. What are input & output devices? - Keyboards, Floppy disk are the examples of input
devices. Printer, LED / LCD display, CRT Monitor are the examples of output devices.
21. Can an RC circuit be used as clock source for 8085? - Yes, it can be used, if an accurate
clock frequency is not required. Also, the component cost is low compared to LC or Crystal.
22. Why crystal is a preferred clock source? - Because of high stability, large Q (Quality
Factor) & the frequency that doesn‘t drift with aging. Crystal is used as a clock source most
of the times.
23. Which interrupt is not level-sensitive in 8085? - RST 7.5 is a raising edge-triggering
interrupt.
24. What does Quality factor mean? - The Quality factor is also defined, as Q. So it is a
number, which reflects the lossness of a circuit. Higher the Q, the lower are the losses.
25. What are level-triggering interrupt? - RST 6.5 & RST 5.5 are level-triggering interrupts.
26. What is a Microprocessor?
Microprocessor is a program-controlled device, which fetches the instructions from memory,
decodes and executes the instructions. Most Micro Processor are single- chip devices.
27. What is SIM and RIM instructions?
SIM is Set Interrupt Mask. Used to mask the hardware interrupts.
RIM is Read Interrupt Mask. Used to check whether the interrupt is Masked or not.
28. Define interrupt?
Interrupt is an signal sent or given to the processor in order to interrupt or to stop the current
process/execution and transfer the control to the specified process in order to perform
particular task.
29. Difference between microprocessor and microcontroller?
30. What are the flags in 8086? - In 8086 Carry flag, Parity flag, Auxiliary carry flag, Zero
flag, Overflow flag, Trace flag, Interrupt flag, Direction flag, and Sign flag.
31. Give examples for Micro controller? - Z80, Intel MSC51 &96, Motorola are the best
examples of Microcontroller.
32. What is the difference between 8086 and 8088? - The BIU in 8088 is 8-bit data bus & 16-
bit in 8086.Instruction queue is 4 byte long in 8088and 6 byte in 8086.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 52
CHAPTER 3
DIGITAL
ELECTRONICS

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 53
Digital electronics represent signals by discrete bands of analog levels, rather than by a
continuous range. All levels within a band represent the same signal state. Relatively small
changes to the analog signal levels due to manufacturing tolerance, signal attenuation or
parasitic noise do not leave the discrete envelope, and as a result are ignored by signal state
sensing circuitry.
In most cases the number of these states is two, and they are represented by two voltage
bands: one near a reference value (typically termed as "ground" or zero volts) and a value
near the supply voltage, corresponding to the "false" ("0") and "true" ("1") values of the
Boolean domain respectively.
Digital techniques are useful because it is easier to get an electronic device to switch into one
of a number of known states than to accurately reproduce a continuous range of values.
Digital electronic circuits are usually made from large assemblies of logic gates, simple
electronic representations of Boolean logic functions.
Advantages:
One advantage of digital circuits when compared to analog circuits is [2]
signals represented
digitally can be transmitted without degradation due to noise. For example, a continuous
audio signal, transmitted as a sequence of 1s and 0s, can be reconstructed without error
provided the noise picked up in transmission is not enough to prevent identification of the 1s
and 0s. An hour of music can be stored on a compact disc using about 6 billion binary digits.
In a digital system, a more precise representation of a signal can be obtained by using more
binary digits to represent it. While this requires more digital circuits to process the signals,
each digit is handled by the same kind of hardware. In an analog system, additional resolution
requires fundamental improvements in the linearity and noise characteristics of each step of
the signal chain.
Computer-controlled digital systems can be controlled by software, allowing new functions to
be added without changing hardware. Often this can be done outside of the factory by
updating the product's software. So, the product's design errors can be corrected after the
product is in a customer's hands.
Information storage can be easier in digital systems than in analog ones. The noise-immunity
of digital systems permits data to be stored and retrieved without degradation. In an analog
system, noise from aging and wear degrade the information stored. In a digital system, as
long as the total noise is below a certain level, the information can be recovered perfectly.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 54
Disadvantages:
In some cases, digital circuits use more energy than analog circuits to accomplish the same
tasks, thus producing more heat which increases the complexity of the circuits such as the
inclusion of heat sinks. In portable or battery-powered systems this can limit use of digital
systems.
For example, battery-powered cellular telephones often use a low-power analog front-end to
amplify and tune in the radio signals from the base station. However, a base station has grid
power and can use power-hungry, but very flexible software radios. Such base stations can be
easily reprogrammed to process the signals used in new cellular standards.
Digital circuits are sometimes more expensive, especially in small quantities.
Most useful digital systems must translate from continuous analog signals to discrete digital
signals. This causes quantization errors. Quantization error can be reduced if the system
stores enough digital data to represent the signal to the desired degree of fidelity. The
Nyquist-Shannon sampling theorem provides an important guideline as to how much digital
data is needed to accurately portray a given analog signal.
In some systems, if a single piece of digital data is lost or misinterpreted, the meaning of
large blocks of related data can completely change. Because of the cliff effect, it can be
difficult for users to tell if a particular system is right on the edge of failure, or if it can
tolerate much more noise before failing.
Digital fragility can be reduced by designing a digital system for robustness. For example, a
parity bit or other error management method can be inserted into the signal path. These
schemes help the system detect errors, and then either correct the errors, or at least ask for a
new copy of the data. In a state-machine, the state transition logic can be designed to catch
unused states and trigger a reset sequence or other error recovery routine.
Digital memory and transmission systems can use techniques such as error detection and
correction to use additional data to correct any errors in transmission and storage.
On the other hand, some techniques used in digital systems make those systems more
vulnerable to single-bit errors. These techniques are acceptable when the underlying bits are
reliable enough that such errors are highly unlikely. A single-bit error in audio data stored
directly as linear pulse code modulation (such as on a CD-ROM) causes, at worst, a single
click. Instead, many people use audio compression to save storage space and download time,
even though a single-bit error may corrupt the entire song.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 55
Design issues in digital circuits:
Digital circuits are made from analog components. The design must assure that the analog
nature of the components doesn't dominate the desired digital behavior. Digital systems must
manage noise and timing margins, parasitic inductances and capacitances, and filter power
connections.
Bad designs have intermittent problems such as "glitches", vanishingly-fast pulses that may
trigger some logic but not others, "runt pulses" that do not reach valid "threshold" voltages, or
unexpected ("undecoded") combinations of logic states.
Additionally, where clocked digital systems interface to analogue systems or systems that are
driven from a different clock, the digital system can be subject to metastability where a
change to the input violates the set-up time for a digital input latch. This situation will self-
resolve, but will take a random time, and while it persists can result in invalid signals being
propagated within the digital system for a short time.
Since digital circuits are made from analog components, digital circuits calculate more slowly
than low-precision analog circuits that use a similar amount of space and power. However,
the digital circuit will calculate more repeatably, because of its high noise immunity. On the
other hand, in the high-precision domain (for example, where 14 or more bits of precision are
needed), analog circuits require much more power and area than digital equivalents.
Structure of digital systems:
Engineers use many methods to minimize logic functions, in order to reduce the circuit's
complexity. When the complexity is less, the circuit also has fewer errors and less
electronics, and is therefore less expensive.
The most widely used simplification is a minimization algorithm like the Espresso heuristic
logic minimizer within a CAD system, although historically, binary decision diagrams, an
automated Quine–McCluskey algorithm, truth tables, Karnaugh maps, and Boolean algebra
have been used.
Representations are crucial to an engineer's design of digital circuits. Some analysis methods
only work with particular representations.
The classical way to represent a digital circuit is with an equivalent set of logic gates.
Another way, often with the least electronics, is to construct an equivalent system of
electronic switches (usually transistors). One of the easiest ways is to simply have a memory
containing a truth table. The inputs are fed into the address of the memory, and the data
outputs of the memory become the outputs.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 56
For automated analysis, these representations have digital file formats that can be processed
by computer programs. Most digital engineers are very careful to select computer programs
("tools") with compatible file formats.
To choose representations, engineers consider types of digital systems. Most digital systems
divide into "combinational systems" and "sequential systems." A combinational system
always presents the same output when given the same inputs. It is basically a representation
of a set of logic functions, as already discussed.
A sequential system is a combinational system with some of the outputs fed back as inputs.
This makes the digital machine perform a "sequence" of operations. The simplest sequential
system is probably a flip flop, a mechanism that represents a binary digit or "bit".
Sequential systems are often designed as state machines. In this way, engineers can design a
system's gross behavior, and even test it in a simulation, without considering all the details of
the logic functions.
Sequential systems divide into two further subcategories. "Synchronous" sequential systems
change state all at once, when a "clock" signal changes state. "Asynchronous" sequential
systems propagate changes whenever inputs change. Synchronous sequential systems are
made of well-characterized asynchronous circuits such as flip-flops, that change only when
the clock changes, and which have carefully designed timing margins.
The usual way to implement a synchronous sequential state machine is to divide it into a
piece of combinational logic and a set of flip flops called a "state register." Each time a clock
signal ticks, the state register captures the feedback generated from the previous state of the
combinational logic, and feeds it back as an unchanging input to the combinational part of the
state machine. The fastest rate of the clock is set by the most time-consuming logic
calculation in the combinational logic.
The state register is just a representation of a binary number. If the states in the state machine
are numbered (easy to arrange), the logic function is some combinational logic that produces
the number of the next state.
In comparison, asynchronous systems are very hard to design because all possible states, in
all possible timings must be considered. The usual method is to construct a table of the
minimum and maximum time that each such state can exist, and then adjust the circuit to
minimize the number of such states, and force the circuit to periodically wait for all of its
parts to enter a compatible state (this is called "self-resynchronization"). Without such careful
design, it is easy to accidentally produce asynchronous logic that is "unstable", that is, real
electronics will have unpredictable results because of the cumulative delays caused by small

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 57
variations in the values of the electronic components. Certain circuits (such as the
synchronizer flip-flops, switch debouncers, arbiters, and the like which allow external
unsynchronized signals to enter synchronous logic circuits) are inherently asynchronous in
their design and must be analyzed as such.
As of 2005, almost all digital machines are synchronous designs because it is much easier to
create and verify a synchronous design—the software currently used to simulate digital
machines does not yet handle asynchronous designs. However, asynchronous logic is thought
to be superior, if it can be made to work, because its speed is not constrained by an arbitrary
clock; instead, it runs at the maximum speed of its logic gates. Building an asynchronous
circuit using faster parts makes the circuit faster.
Many digital systems are data flow machines. These are usually designed using synchronous
register transfer logic, using hardware description languages such as VHDL or Verilog.
In register transfer logic, binary numbers are stored in groups of flip flops called registers.
The outputs of each register are a bundle of wires called a "bus" that carries that number to
other calculations. A calculation is simply a piece of combinational logic. Each calculation
also has an output bus, and these may be connected to the inputs of several registers.
Sometimes a register will have a multiplexer on its input, so that it can store a number from
any one of several buses. Alternatively, the outputs of several items may be connected to a
bus through buffers that can turn off the output of all of the devices except one. A sequential
state machine controls when each register accepts new data from its input.
In the 1980s, some researchers discovered that almost all synchronous register-transfer
machines could be converted to asynchronous designs by using first-in-first-out
synchronization logic. In this scheme, the digital machine is characterized as a set of data
flows. In each step of the flow, an asynchronous "synchronization circuit" determines when
the outputs of that step are valid, and presents a signal that says, "grab the data" to the stages
that use that stage's inputs. It turns out that just a few relatively simple synchronization
circuits are needed.
The most general-purpose register-transfer logic machine is a computer. This is basically an
automatic binary abacus. The control unit of a computer is usually designed as a micro
program run by a micro sequencer. A micro program is much like a player-piano roll. Each
table entry or "word" of the micro program commands the state of every bit that controls the
computer. The sequencer then counts, and the count addresses the memory or combinational
logic machine that contains the micro program. The bits from the micro program control the

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 58
arithmetic logic unit, memory and other parts of the computer, including the micro sequencer
itself.
In this way, the complex task of designing the controls of a computer is reduced to a simpler
task of programming a collection of much simpler logic machines.
Computer architecture is a specialized engineering activity that tries to arrange the registers,
calculation logic, buses and other parts of the computer in the best way for some purpose.
Computer architects have applied large amounts of ingenuity to computer design to reduce
the cost and increase the speed and immunity to programming errors of computers. An
increasingly common goal is to reduce the power used in a battery-powered computer system,
such as a cell-phone. Many computer architects serve an extended apprenticeship as micro
programmers.
"Specialized computers" are usually a conventional computer with a special-purpose micro
program.
BOOLEAN ALGEBRA:
Basic operations
After values, the next ingredient of any algebraic system is its operations. Whereas
elementary algebra is based on numeric operations multiplication xy, addition x + y, and
negation −x, Boolean algebra is customarily based on logical counterparts to those
operations, namely conjunction: x∧y or Kxy (AND); disjunction: x∨y or Axy (OR); and
complement or negation: ¬x or Nx (NOT). In electronics, the AND is represented as a
multiplication, the OR is represented as an addition, and the NOT is represented with an over
bar: x ∧ y and x ∨ y, therefore, become xy and x + y.
Conjunction is the closest of these three to its numerical counterpart: consider 0 and 1 = 0,
and 1 and 1 = 1; it is multiplication. As a logical operation the conjunction of two
propositions is true when both propositions are true, and otherwise is false. The first column
of Figure 1 below tabulates the values of x∧y for the four possible valuations for x and y;
such a tabulation is traditionally called a truth table.
Disjunction, in the second column of the figures, works almost like addition, with one
exception: the disjunction of 1 and 1 is neither 2 nor 0 but 1. Thus the disjunction of two
propositions is false when both propositions are false, and otherwise is true. This is just the
definition of conjunction with true and false interchanged everywhere because of this we say
that disjunction is the dual of conjunction.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 59
Logical negation however does not work like numerical negation at all. Instead it corresponds
to incrementation: ¬x = x+1 mod 2. Yet it shares in common with numerical negation the
property that applying it twice returns the original value: ¬¬x = x, just as − (−x) = x. An
operation with this property is called an involution. The set {0, 1} has two permutations, both
involuntary, namely the identity, no movement, corresponding to numerical negation mod 2
(since +1 = −1 mod 2), and SWAP, corresponding to logical negation. Using negation we can
formalize the notion that conjunction is dual to disjunction via De Morgan's laws, ¬ (x∧y) =
¬x ∨ ¬y and ¬ (x∨y) = ¬x ∧ ¬y. These can also be construed as definitions of conjunction in
terms of disjunction and vice versa: x∧y = ¬ (¬x ∨ ¬y) and x∨y = ¬ (¬x ∧ ¬y).
Various representations of Boolean operations
Figure shows the symbols used in digital electronics for conjunction and disjunction; the
input ports are on the left and the signals flow through to the output port on the right.
Inverters negating the input signals on the way in, or the output signals on the way out, are
represented as circles on the port to be inverted.
FLIP-FLOPS:
In electronics, a flip-flop or latch is a circuit that has two stable states and can be used to
store state information. The circuit can be made to change state by signals applied to one or
more control inputs and will have one or two outputs. It is the basic storage element in

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 60
sequential logic. Flip-flops and latches are a fundamental building block of digital electronics
systems used in computers, communications, and many other types of systems.
Flip-flops and latches are used as data storage elements. Such data storage can be used for
storage of state, and such a circuit is described as sequential logic. When used in a finite-state
machine, the output and next state depend not only on its current input, but also on its current
state (and hence, previous inputs). It can also be used for counting of pulses, and for
synchronizing variably-timed input signals to some reference timing signal.
Flip-flops can be either simple (transparent or opaque) or clocked (synchronous or edge-
triggered); the simple ones are commonly called latches.[1]
The word latch is mainly used for
storage elements, while clocked devices are described as flip-flops.[2]
Flip-Flops block diagram and their properties:
Flip-flops are synchronous bistable devices. The term synchronous means the output changes
state only when the clock input is triggered. That is, changes in the output occur in
synchronization with the clock. A flip-flop circuit has two outputs, one for the normal value
and one for the complement value of the stored bit. Since memory elements in sequential
circuits are usually flip-flops, it is worth summarizing the behaviour of various flip-flop types
before proceeding further. All flip-flops can be divided into four basic types: SR, JK, D and
T. They differ in the number of inputs and in the response invoked by different value of input
signals. The four types of flip-flops are defined in the Table 5.1. Each of these flip-flops can
be uniquely described by its graphical symbol, its characteristic table, its characteristic
equation or excitation table. All flip-flops have output signals Q and Q'.
Flip-
Flop
Name
Flip-Flop
Symbol Characteristic Table
Characteristic
Equation Excitation Table
SR
S R Q(next)
0 0 Q
0 1 0
1 0 1
1 1 ?
Q(next) = S + R’Q
SR = 0
Q Q(next) S R
0 0 0 X
0 1 1 0
1 0 0 1
1 1 X 0

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 61
JK
J K Q(next)
0 0 Q
0 1 0
1 0 1
1 1 Q’
Q(next) = JQ’ +
K’Q
Q Q(next) J K
0 0 0 X
0 1 1 X
1 0 X 1
1 1 X 0
D
D Q(next)
0 0
1 1
Q(next) = D
Q Q(next) D
0 0 0
0 1 1
1 0 0
1 1 1
T
T Q(next)
0 Q
1 Q’
Q(next) = TQ’ +
T’Q
Q Q(next) T
0 0 0
0 1 1
1 0 1
1 1 0
Table 5.1 Flip-flops and their properties
Logic Diagram
D- Flip Flop

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 62
JK Flip Flop
T Flip Flop
MULTIPLEXER & DEMULTIPLEXER:
In electronics, a multiplexer (or MUX) is a device that selects one of several analog or
digital input signals and forwards the selected input into a single line.[1]
A multiplexer of 2n
inputs has n select lines, which are used to select which input line to send to the output.[2]
Multiplexers are mainly used to increase the amount of data that can be sent over the network
within a certain amount of time and bandwidth.[1]
A multiplexer is also called a data
selector. They are used in CCTV, and almost every business that has CCTV fitted, will own
one of these.
An electronic multiplexer makes it possible for several signals to share one device or
resource, for example one A/D converter or one communication line, instead of having one
device per input signal.
On the other hand, a demultiplexer (or demux) is a device taking a single input signal and
selecting one of many data-output-lines, which is connected to the single input. A multiplexer
is often used with a complementary demultiplexer on the receiving end.[1]
An electronic multiplexer can be considered as a multiple-input, single-output switch, and a
demultiplexer as a single-input, multiple-output switch.[3]
The schematic symbol for a
multiplexer is an isosceles trapezoid with the longer parallel side containing the input pins
and the short parallel side containing the output pin.[4]
The schematic on the right shows a 2-
to-1 multiplexer on the left and an equivalent switch on the right. The wire connects the
desired input to the output.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 63
PARALLEL VERSUS SERIAL DATA TRANSMISSIONS:
There are two methods of transmitting digital
data.These methods are parallel and serial transmissions. In parallel data transmission,
all bits of the binary data are transmitted simultaneously. For example, to transmit an 8-bit
binary number in parallel from one unit to another, eight transmission lines are
required. Each bit requires its own separate data path. All bits of a word are transmitted at
the same time. This method of transmission can move a significant amount of data in a given
period of time. Its disadvantage is the large number of interconnecting cables between
the two units. For large binary words, cabling becomes complex and expensive. This is
particularly true if the distance between the two units is great. Long multi-wire cables are not
only expensive, but also require special interfacing to minimize noise and distortion
problems. Serial data transmission is the process of transmitting binary words a bit at
a time. Since the bits time-share the transmission medium, only one interconnecting lead is
required. While serial data transmission is much simpler and less expensive because of the
use of a single interconnecting line, it is a very slow method of data transmission. Serial data
transmission is useful in systems where high speed is not a requirement. Serial
data transmission techniques are widely used in
transmitting data between a computer and its peripheral units. While the computer
operates at very high speeds, most peripheral units are slow because of their
electromechanical nature. Slower serial data transmission is more compatible with such
devices. Since the speed of serial transmission is more than adequate in such units, the
advantages of low cost and simplicity of the signal interconnecting obtained.
PARALLEL DATA TRANSMISSION:
In a parallel data transmission system, each bit of the binary word to be transmitted must
have its own data path. There are a variety of ways to implement this data path. The two basic
classifications of transmission line circuits are single-ended and balanced. Single-ended
transmission systems use a single-wire data path for each bit. When combined with a ground
or return reference, the electrical circuit between the sending circuit and the receiving circuit
is complete. In a balanced transmission line system, two conductor cables are used to send
the data. The data on the dual-transmission line is complementary. The dual-transmission
lines also use a ground return reference. While a single-ended transmission line is simpler
and less expensive, it is subject to more noise problems than the balanced or dual-
transmission line system.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 64
MULTI-VIBRATOR:
A multivibrator is an electronic circuit used to implement a variety of simple two-state
systems such as oscillators, timers and flip-flops. It is characterized by two amplifying
devices (transistors, electron tubes or other devices) cross-coupled by resistors or capacitors.
The name "multivibrator" was initially applied to the free-running oscillator version of the
circuit because its output waveform was rich in harmonics. [1]
There are three types of
multivibrator circuits depending on the circuit operation:
astable, in which the circuit is not stable in either state —it continually switches from one
state to the other. It does not require an input such as a clock pulse.
monostable, in which one of the states is stable, but the other state is unstable (transient).
A trigger causes the circuit to enter the unstable state. After entering the unstable state, the
circuit will return to the stable state after a set time. Such a circuit is useful for creating a
timing period of fixed duration in response to some external event. This circuit is also known
as a one shot.
bistable, in which the circuit is stable in either state. The circuit can be flipped from one
state to the other by an external event or trigger.
Multivibrators find applications in a variety of systems where square waves or timed intervals
are required. For example, before the advent of low-cost integrated circuits, chains of
multivibrators found use as frequency dividers. A free-running multivibrator with a frequency
of one-half to one-tenth of the reference frequency would accurately lock to the reference
frequency. This technique was used in early electronic organs, to keep notes of different
octaves accurately in tune. Other applications included early television systems, where the
various line and frame frequencies were kept synchronized by pulses included in the video
signal.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 65
OBJECTIVE TYPE
QUESTION

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 66
1.
Any number with an exponent of zero is equal to:
a. zero
b. one
c. that number
d. ten
2. In the decimal numbering system, what is the MSD?
A. The middle digit of a stream of numbers
B. The digit to the right of the decimal point
C. The last digit on the right
D. The digit with the most weight
3. Which of the following statements does NOT describe an advantage of digital technology?
A. The values may vary over a continuous range.
B. The circuits are less affected by noise.
C. The operation can be programmed.
D. Information storage is easy.
4. The generic array logic (GAL) device is ________.
A. one-time programmable
B. reprogrammable
C. a CMOS device
D. reprogrammable and a CMOS device
5. The range of voltages between VL(max) and VH(min) are ________.
A. unknown
B. unnecessary
C. unacceptable
D. between 2 V and 5 V
6. What is a digital-to-analog converter?
A. It takes the digital information from an audio CD and converts it to a usable form.
B. It allows the use of cheaper analog techniques, which are always simpler.
C. It stores digital data on a hard drive.
D. It converts direct current to alternating current.
7. What are the symbols used to represent digits in the binary number system?
A. 0,1
B. 0,1,2
C. 0 through 8
D. 1,2
8. A full subtracter circuit requires ________.
A. two inputs and two outputs
B. two inputs and three outputs
C. three inputs and one output
D. three inputs and two outputs

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 67
9. The output of an AND gate is LOW ________.
A. all the time
B. when any input is LOW
C. when any input is HIGH
D. when all inputs are HIGH
10. Give the decimal value of binary 10010.
A. 610 B. 910
C. 1810 D. 2010
11. Parallel format means that:
A. each digital signal has its own conductor.
B. several digital signals are sent on each conductor.
C. both binary and hexadecimal can be used.
D. no clock is needed.
E. None
12. A decoder converts ________.
A. noncoded information into coded form
B. coded information into noncoded form
C. HIGHs to LOWs
D. LOWs to HIGHs
13. A DAC changes ________.
A. an analog signal into digital data
B. digital data into an analog signal
C. digital data into an amplified signal
D. none of the above
14. The output of a NOT gate is HIGH when ________.
A. the input is LOW
B. the input is HIGH
C. the input changes from LOW to HIGH
D. voltage is removed from the gate
15. The output of an OR gate is LOW when ________.
A. all inputs are LOW
B. any input is LOW
C. any input is HIGH
D. all inputs are HIGH
16. Which of the following is not an analog device?
A. Thermocouple
B. Current flow in a circuit
C. Light switch
D. Audio microphone

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 68
17. A demultiplexer has ________.
A. one data input and a number of selection inputs, and they have several outputs
B. one input and one output
C. several inputs and several outputs
D. several inputs and one output
E. None
18. A flip-flop has ________.
A. one stable state
B. no stable states
C. two stable states
D. none of the above
19. Digital signals transmitted on a single conductor (and a ground) must be transmitted in:
A. slow speed.
B. parallel.
C. analog.
D. serial.
20. In a certain digital waveform, the period is four times the pulse width. The duty cycle is
________.
A. 0% B. 25%
C. 50% D. 100%
21. In positive logic, ________.
A. a HIGH = 1, a LOW = 0
B. a LOW = 1, a HIGH = 0
C. only HIGHs are present
D. only LOWs are present
22. Convert the fractional binary number 0000.1010 to decimal.
A. 0.625 B. 0.50
C. 0.55 D. 0.10
23. Digital representations of numerical values of quantities may BEST be described as
having characteristics:
A. that are difficult to interpret because they are continuously changing.
B. that vary constantly over a continuous range of values.
C. that vary in constant and direct proportion to the values they represent.
D. that vary in discrete steps in proportion to the values they represent.
24. A common instrument used in troubleshooting a digital circuit is a(n) ________.
A. logic probe
B. oscilloscope
C. pulser
D. all of the above

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 69
25. The parallel transmission of digital data:
A. is much slower than the serial transmission of data.
B. requires only one signal line between sender and receiver.
C. requires as many signal lines between sender and receiver as there are data bits.
D. is less expensive than the serial method of data transmission.
26. Convert the fractional decimal number 6.75 to binary.
A. 0111.1100 B. 0110.1010
C. 0110.1100 D. 0110.0110
E. None
27. What is one relative disadvantage of serial transfer?
A. It requires too many conductors.
B. Its interconnect system is complex.
C. It is slow.
D. It can only be used over very short distances.
28. Which format requires fewer conductors?
A. Parallel
B. Serial
C. Both are the same
D. Cannot tell
29. A pulse has a period of 15 ms. Its frequency is ________.
A. 6.66 Hz
B. 66.66 Hz
C. 666.66 Hz
D. 15 Hz
30. Give the decimal value of binary 10000110.
A. 13410 B. 14410
C. 11010 D. 12610
31. The rise time is the time it takes a pulse to go from ________.
A. the base line to the maximum HIGH voltage
B. 10% of the pulse amplitude to the maximum HIGH voltage
C. the base line to 90% of the pulse amplitude
D. 10% of the pulse amplitude to 90% of the pulse amplitude
32. What is an analog-to-digital converter?
A. It makes digital signals.
B. It takes analog signals and puts them in digital format.
C. It allows the use of digital signals in everyday life.
D. It stores information on a CD.
33. A multiplexer has ________.
A. one input and several outputs
B. one input and one output
C. several inputs and several outputs
D. several inputs and one output

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 70
34. What is the decimal value of 23 ?
A. 2 B. 4
C. 6 D. 8
35. An encoder converts ________.
A. noncoded information into coded form
B. coded information into noncoded form
C. HIGHs to LOWs
D. LOWs to HIGHs
36. What kind of logic device or circuit is used to store information?
A. Counter B. Register
C. Inverter D. Buffer
37. PLCC packages have leads on ________.
A. one side
B. two sides
C. three sides
D. four sides
38. What is the typical invalid voltage for a binary signal?
A. 0.7–2.8 volts
B. 0.8–3 volts
C. 0.8–2 volts
D. 0.7–2.5 volts
E. None
39. Convert the fractional binary number 0001.0010 to decimal.
A. 1.40 B. 1.125
C. 1.20 D. 1.80
40. Convert the fractional binary number 10010.0100 to decimal.
A. 24.50 B. 18.25
C. 18.40 D. 16.25
E. None
41. How many binary bits are necessary to represent 748 different numbers?
A. 9 B. 7
C. 10 D. 8
42. A periodic digital waveform has a pulse width (tw) of 6 ms and a period (T) of 18 ms. The
duty cycle is ________.
A. 3.3% B. 33.3%
C. 6% D. 18%
43. Any number with an exponent of one is equal to:
A. zero.
B. one.
C. two.
D. that number.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 71
44. Serial format means digital signals are:
A. sent over many conductors simultaneously.
B. sent over one conductor sequentially.
C. sent in groups of eight signals.
D. sent in binary coded decimal.
45. What is the decimal value of 2–1
?
A. 0.5 B. 0.25
C. 0.05 D. 0.1
46. Which format can send several bits of information faster?
A. Parallel
B. Serial
C. Both are the same
D. Cannot tell
47. The frequency of a pulse train is 2 kHz. The pulse period is ________.
A. 5 ms
B. 50 ms
C. 500 s
D. 2 s
48. What has happened to the advances in digital technologies over the past three decades?
A. Slowed down considerably
B. Continued to increase, but at a decreasing rate
C. Made excellent progress
D. Nothing short of phenomenal
49. A type of digital circuit technology that uses bipolar junction transistors is ________.
A. TTL B. CMOS
C. LSI D. NMOS
50. How many unique symbols are used in the decimal number system?
A. One B. Nine
C. Ten D. Unlimited
51. A classification of ICs with complexities of 12 to 100 equivalent gates on a chip is known
as ________.
A. SSI B. MSI
C. LSI D. VLSI
52. Which of the following is a semiconductor memory?
A. RAM B. MAR
C. CD-ROM D. CD

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 72
53. The holes through a PC board are ________.
A. smaller with SMT than with through-hole mounting
B. larger with SMT than with through-hole mounting
C. the same size as with through-hole mounting
D. usually unnecessary
54. A classification of ICs with complexities of 100 to 10,000 equivalent gates per chip is
known as ________.
A. SSI B. MSI
C. LSI D. VLSI
55.
Determine the output frequency for a frequency division circuit that contains 12 flip-
flops with an input clock frequency of 20.48 MHz.
A. 10.24 kHz
B. 5 kHz
C. 30.24 kHz
D 15KHz
56.Which statement BEST describes the operation of a negative-edge-triggered D flip-
flop?
A
.
The logic level at the D input is transferred to Q on NGT of CLK.
B
.
The Q output is ALWAYS identical to the CLK input if the D input is HIGH.
C
.
The Q output is ALWAYS identical to the D input when CLK = PGT.
D
.
The Q output is ALWAYS identical to the D input.
57. Propagation delay time, tPLH, is measured from the ________.
A
.
triggering edge of the clock pulse to the LOW-to-HIGH transition of the output
B
.
triggering edge of the clock pulse to the HIGH-to-LOW transition of the output
C
.
preset input to the LOW-to-HIGH transition of the output
D
.
clear input to the HIGH-to-LOW transition of the output
58. How many flip-flops are in the 7475 IC?
A. 1 B. 2
C. 4 D. 8
59.How many flip-flops are required to produce a divide-by-128 device?
A. 1 B. 4
C. 6 D. 7

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 73
60.The timing network that sets the output frequency of a 555 astable circuit contains
________.
A. three external resistors are used
B. two external resistors and an external capacitor are used
C. an external resistor and two external capacitors are used
D. no external resistor or capacitor is required
61.The phenomenon of interpreting unwanted signals on J and K while Cp (clock pulse) is
HIGH is called ________.
A. parity error checking
B. ones catching
C. digital discrimination
D. digital filtering
62.What is another name for a one-shot?
A. Monostable B. Multivibrator
C. Bistable D. Astable
63.On a master-slave flip-flop, when is the master enabled?
A. when the gate is LOW
B. when the gate is HIGH
C. both of the above
D. neither of the above
64.One example of the use of an S-R flip-flop is as a(n):
A. racer
B. astable oscillator
C. binary storage register
D. transition pulse generator
65.What is the difference between the 7476 and the 74LS76?
A. the 7476 is master-slave, the 74LS76 is master-slave
B. the 7476 is edge-triggered, the 74LS76 is edge-triggered
C. the 7476 is edge-triggered, the 74LS76 is master-slave
D. the 7476 is master-slave, the 74LS76 is edge-triggered
66.Which of the following is correct for a gated D flip-flop?
A. The output toggles if one of the inputs is held HIGH.
B. Only one of the inputs can be HIGH at a time.
C. The output complement follows the input when enabled.
D. Q output follows the input D when the enable is HIGH.
67.How can the cross-coupled NAND flip-flop be made to have active-HIGH S-R inputs?
A. It can't be done.
B. Invert the Q outputs.
C. Invert the S-R inputs.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 74
68.A 555 operating as a monostable multivibrator has an R1 of 1 M . Determine C1 for a
pulse width of 2 s.
A. 1.8 F
B. 18 F
C. 18 pF
D. 18 nF
69.Master-slave J-K flip-flops are called pulse-triggered or level-triggered devices because
input data is read during the entire time the clock pulse is at a LOW level.
A. True B. False
70.Which of the following is correct for a D latch?
A. The output toggles if one of the inputs is held HIGH.
B. Q output follows the input D when the enable is HIGH.
C. Only one of the inputs can be HIGH at a time.
D. The output complement follows the input when enabled.
71.A J-K flip-flop is in a "no change" condition when ________.
A. J = 1, K = 1
B. J = 1, K = 0
C. J = 0, K = 1
D. J = 0, K = 0
72.A correct output is achieved from a master-slave J-K flip-flop only if its inputs are stable
while the:
A. clock is LOW
B. slave is transferring
C. flip-flop is reset
D. clock is HIGH
73. Convert the following SOP expression to an equivalent POS expression.
A.
B.
C.
D.
74. Determine the values of A, B, C, and D that make the sum term equal to
zero.
A. A = 1, B = 0, C = 0, D = 0
B. A = 1, B = 0, C = 1, D = 0
C. A = 0, B = 1, C = 0, D = 0
D. A = 1, B = 0, C = 1, D = 1

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 75
75. Which of the following expressions is in the sum-of-products (SOP) form?
A. (A + B)(C + D)
B. (A)B(CD)
C. AB(CD)
D. AB + CD

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 76
ANSWERS
1 2 3 4 5 6 7 8 9 10
A D C A C B D A D B
11 12 13 14 15 16 17 18 19 20
E B B A A D E A A B
21 22 23 24 25 26 27 28 29 30
D D A B B E A E C A
31 32 33 34 35 36 37 38 39 40
B B D D D B C E B B
41 42 43 44 45 46 47 48 49 50
B D C B C B B A D D
51 52 53 54 55 56 57 58 59 60
A A A D B B A C A C
61 62 63 64 65 66 67 68 69 70
D B B A D A A B A D
71 72 73 74 75
B D A A B

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 77
CHAPTER 4
DATA COMMUNICATION
&
COMPUTER NETWORKS

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 78
Today computer is available in many offices and homes and therefore there is a need to share
data and programs among various computers with the advancement of data communication
facilities. The communication between computers has increased and it thus it has extended
the power of computer beyond the computer room. Now a user sitting at one place can
communicate computers of any remote sites through communication channel. For
communication of information and messages we use telephone and postal communication
systems. Similarly data and information from one computer system can be transmitted to
other systems across geographical areas. Thus data transmission is the movement of
information using some standard methods. These methods include electrical signals carried
along a conductor, optical signals along an optical fibers and electromagnetic areas. The
following are the basic requirements for working of a communication system.
1. A sender (source) which creates the message to be transmitted.
2. A medium that carries the message.
3. A receiver (sink) which receives the message.
In data communication four basic terms are frequently used. They are
Data: A collection of facts in raw forms that become information after processing.
Signals: Electric or electromagnetic encoding of data.
Signaling: Propagation of signals across a communication medium.
Transmission: Communication of data achieved by the processing of signals.
The data communication software instructs computer systems and devices as to how exactly
data is to be transferred from one place to another. The procedure of data transformation in
the form of software is commonly called protocol. The data transmission software or
protocols perform the following functions for the efficient and error free transmission of data.
1. Data sequencing: A long message to be transmitted is broken into smaller packets of fixed
size for error free data transmission.
2. Data Routing: It is the process of finding the most efficient route between source and
destination before sending the data.
3. Flow control: All machines are not equally efficient in terms of speed. Hence the flow
control regulates the process of sending data between fast sender and slow receiver.
4. Error Control: Error detecting and recovering is the one of the main function of
communication software. It ensures that data are transmitted without any error.
There are three ways for transmitting data from one point to another

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 79
1. Simplex: In simplex mode the communication can take place in one direction. The
receiver receives the signal from the transmitting device. In this mode the flow of information
is Uni.-directional. Hence it is rarely used for data communication.
2. Half-duplex: In half-duplex mode the communication channel is used in both directions,
but only in one direction at a time. Thus a half-duplex line can alternately send and receive
data.
Full-duplex: In full duplex the communication channel is used in both directions at the same
time. Use of full-duplex line improves the efficiency as the line turn-around time required in
half-duplex arrangement is eliminated. Example of this mode of transmission is the telephone
line. Data is transmitted from one point to another point by means of electrical signals that
may be in digital and analog form. So one should know the fundamental difference between
analog and digital signals. In analog signal the transmission power varies over a continuous
range with respect to sound, light and radio waves. On the other hand a digital signal may
assume only discrete set of values within a given range. Examples are computer and
computer related equipment. Analog signal is measured in Volts and its frequency in Hertz
(Hz). A digital signal is a sequence of voltage represented in binary form. When digital data
are to be sent over an analog form the digital signal must be converted to analog form. So the
technique by which a digital signal is converted to analog form is known as modulation. And
the reverse process, that is the conversion of analog signal to its digital form, is known as
demodulation. The device, which converts digital signal into analog, and the reverse, is
known as modem. Data transmission through a medium can be either asynchronous or
synchronous. In asynchronous transmission data is transmitted character by character as you
go on typing on a keyboard. Hence there is irregular gaps between characters. However, it is
cheaper to implement, as you do not have to save the data before sending. On the other hand,
in the synchronous mode, the saved data is transmitted block by block. Each block can
contain many characters. Synchronous transmission is well suited for remote communication
between a computer and related devices like card reader and printers.
Following are the major communication devices used to day.
1. Wire Pairs: Wire pairs are commonly used in local telephone communication and for
short distance digital data communication. They are usually made up of copper and the pair
of wires is twisted together. Data transmission speed is normally 9600 bits per second in a
distance of 100 meter.
2. Coaxial Cables: Coaxial cable is groups of specially wrapped and insulted wires that are
able to transfer data at higher rate. They consist of a central copper wire surrounded by an

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 80
insulation over which copper mesh is placed. They are used for long distance telephone lines
and local area network for their noise immunity and faster data transfer.
3. Microwave: Microwave system uses very high frequency radio signals to transmit data
through space. The transmitter and receiver of a microwave system should be in line-of-sight
because the radio signal cannot bend. With microwave very long distance transmission is not
possible. In order to overcome the problem of line of sight and power amplification of weak
signal, repeaters are used at intervals of 25 to 30 kilometers between the transmitting and
receiving end.
4. Communication Satellite: The problem of line-sight and repeaters are overcome by using
satellites which are the most widely used data transmission media in modern days. A
communication satellite is a microwave relay station placed in outer space. INSAT-1B is
such a satellite that can be accessible from anywhere in India. In satellite communication,
microwave signal is transmitted from a transmitter on earth to the satellite at space. The
satellite amplifies the weak signal and transmits it back to the receiver. The main advantage
of satellite communication is that it is a single microwave relay station visible from any point
of a very large area. In microwave the data transmission rate is 16 giga bits per second. They
are mostly used to link big metropolitan cities.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 81
OBJECTIVE TYPE
QUESTION

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 82
1. What is a router?
a) Forwards a packet to the next free outgoing link
b) Determines on which outgoing link a packet is to be forwarded
c) Forwards a packet to all outgoing links.
d) Forwards a packet to all outgoing links, except the link upon which the packet originated
2. A file is downloaded to a home computer using a 56 kbps modem connected to an Internet
Service Provider. If the download completes in 2 minutes, estimate the maximum size of data
downloaded.
a) 6.72 Mbit.
b) 26.88 Mbit
c) 13.44 Mbit
d) 336 Kbit.
3. What is the Principle design of Manchester encoding?
a) ensure that the line remains unbalanced
b) increase the bandwidth of a signal transmitted on the medium
c) have more than one symbol per bit period
d) ensure that a transition occurs in the centre of each bit period
4. What are the most commonly used transmission speeds in BPS used in data
communication?
a) 300
b) 2400 c) 1200
d) 9600
5. What is the default subnet mask for a class C network?
a) 127.0.0.1
b) 255.0.0.0
c) 255.255.0.0
d) 255.255.255.0
6. Your company has a LAN in its downtown office and has now set up a LAN in the
manufacturing plant in the suburbs. To enable everyone to share data and resources between
the two LANs, what type of device(s) are needed to connect them? Choose the most correct
answer.
a) Modem
b) Cable
c) Hub
d) Router
7. Which of the following TCP/IP protocol is used for transferring electronic mail messages
from one machine to another?
a) FTP
b) SNMP
c) SMTP
d) RPC

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 83
8. Which of the following device is used to connect two systems, especially if the systems use
different protocols?
a) Hub
b) Bridge
c) Gateway
d) Repeater
9. The synchronous modems are more costly than the asynchronous modems because
a) they produce large volume of data
b) they contain clock recovery circuits
c) they transmit the data with stop and start bits.
d) they operate with a larger bandwidth
10. A distributed network configuration in which all data/information pass through a central
computer is
a) Bus
b) Ring
c) Star
d) Point to point
11. What part of 192.168.10.51 is the Network ID, assuming a default subnet mask?
a) 192
b) 192.168.10
c) 0.0.0.51
d) 51
12. What can greatly reduce TCP/IP configuration problems?
a) WINS Server
b) WINS Proxy
c) DHCP Server
d) PDC
13. Usually, it takes 10-bits to represent one character. How many characters can be
transmitted at a speed of 1200 BPS?
a) 10
b) 12
c) 120
d) 1200
14. What device separates a single network into two segments but lets the two segments
appear as one to higher protocols?
a) Switch
b) Bridge
c) Gateway
d) Router

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 84
15. To make possible the efficient on-line servicing of many teleprocessing system users on
large computer systems, designers are developing
a) Communication systems
b) Multiprogramming systems
c) Virtual storage systems
d) All the above
16. After coding a document into a digital signal, it can be sent by telephone, telex or satellite
to the receiver where the signal is decoded and an exact copy of the original document is
made. What is it called?
a) Telex
b) Word Processor
c) Facsimile
d) Email
17. Which of the following medium access control technique is used for bus/tree?
a) Token ring
b) Token bus
c) CSMA
d) MAC
18. Which of the following is not a transmission medium?
a) Telephone line
b) Coaxial cable
c) modem
d) microwave systems
19. What is the minimum number of wires needed to send data over a serial communication
link layer?
a) 1
b) 2
c) 4
d) 6
20. Typewriter terminals can print computer-generated data at a rate of
a) 10 characters per second
b) 120 characters per second
c) 120 characters per minute
d) 1200 characters per minute
21. Error detection at a data link level is achieved by
a) Bit stuffing
b) CRC
c) Hamming codes
d) Equalization

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 85
22. This refers to two characteristics: when data to be sent and how fast it can be sent.
a) Semantics
b) Syntax
c) Timing
d) None of the above
23. _________ is an idea or a concept that is precursor to an internet standard
a) RCF
b) RFC
c) ID
d) None of the above.
24. ________ refers to the physical or logical arrangement of the network.
a) Data flow
b) Mode of Operation
c) Topology
d) None of the above
25. The number of point to point links required in a fully connected network for 50 entities is
a) 1225
b) 1250
c) 2500
d) 50
26. A Datagram is_______
a) A self contained network layer packet which is generated by the connectionless protocol.
b) Any packet which is broadcast to more than one destination computer.
c) A packet which is sent by a link layer protocol
d) All the above.
27. A modem is connected in between a telephone line and a
a) Network
b) Computer
c) Communication adapter
d) Serial port
28. Which utility is an all-purpose tool for troubleshooting TCP/IP problems?
a) NBTSTAT
b) Netstat
c) PING
d) Hostname
29. In OSI network architecture, the dialogue control and token management are
responsibilities of
a) Session
b) Network
c) Transport
d) Data Link

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 86
30. In a synchronous modem, the digital-to-analog converter transmits signal to the
a) Equalizer
b) Modulator
c) Demodulator
d) Terminal.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 87
ANSWERS
1 B 11 B 21 B
2 A 12 C 22 C
3 A 13 C 23 B
4 D 14 B 24 C
5 D 15 D 25 C
6 D 16 C 26 A
7 C 17 B 27 C
8 C 18 C 28 C
9 B 19 B 29 A
10 C 20 B 30 A

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 88
1.Converting data into signals by transforming and encoding the information to produce
electromagnetic signals is the functionality of a ___________.
a. source
b. transmitter
c. receiver
d. destination
2. Which of the following is the simplest error-detection method?
a. Parity
b. Longitudinal redundancy checking
c. Checksum checking
d. Cyclic redundancy checking
3. Which type of error detection uses binary division?
a. Parity
b. Longitudinal redundancy checking
c. Checksum checking
d. Cyclic redundancy checking
4. Which of the following is also called forward error correction?
a. Simplex
b. Retransmission
c. Detection-error coding
d. Error-correction coding
5.___________________ is a technique which transforms an analogue telephone circuit into
a digital signal, and involves three consecutive processes: sampling, quantization and
encoding.
a. Frequency Modulation (FM)
b. Pulse Code Modulation (PCM)
c. Amplitude Modulation (AM)
d. Phase Modulation (PM)
6.The failure density function, f(t) is used to give the probability of failure during an interval
of time. It is known as ______________.
a. Probability density distribution
b. Cumulative probability distribution
c. Cumulative density distribution
d. Failure probability distribution
7.Rather than sending the absolute value of each sample, it is possible to achieve a smaller
transmission bit-rate by sending the difference between consecutive samples. This is
known as _______________.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 89
a. delta modulation
b. delta–sigma modulation
c. adaptive delta modulation
d. differential PCM
8.The electron beam in the cathode ray tube (CRT) inside the TV set is made to scan the
whole visible surface of the screen in a zigzag pattern. This is known as ____________.
a. raster
b. picture line
c. frame
d. broadcast
9. The figure below shows an example of a modulation system used in digital
communication. What is that modulation system?
a. PCM Modulation.
b. Delta Modulation.
c. Sigma Modulation.
d. Differential Modulation.
10. One of the compression techniques in communication uses the fact that in most pictures,
there is considerable correlation between neighboring areas that is a high degree of
redundancy in the data to compress. This type of compression is known as
_____________.
a. temporal compression
b. dynamic compression
c. spatial compression
d. random compression
11. Reversible or lossless coding is a type of coding for which the exact data can be
recovered after decoding. This type of coding is used by _________________.
a. PCM encoding
b. Huffman encoding
c. Run-length encoding
d. Both b and c

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 90
12. The error represented by the difference between the original and quantized signals set a
fundamental limitation to the performance of PCM systems known as
__________________.
a. dynamic range
b. quantization noise
c. detection-error
d. correction-error
13. The most common distance-limiting factor for multi-mode fiber when carrying
high bit-rate traffic is
a. Attenuation loss
b. Chromatic dispersion
c. Fresnel loss
d. Modal dispersion
14. Which of the following modulation schemes provides 4 bits per baud?
a. QPSK
b. 8-PSK
c. 16-QAM
d. 64-QAM
15. The most common distance-limiting factor for multi-mode fiber when carrying
high bit-rate traffic is
a. Attenuation loss
b. Chromatic dispersion
c. Fresnel loss
d. Modal dispersion
16. If the number of bits per sample in a Pulse Coded Modulation (PCM) system is increased
from 5 bits to 6 bits,the improvement in signal to quantization noise ratio will be
(a) 3 dB
(b) 6 dB
(c) 2pi dB
(d) 0 dB
17. A superheterodyne radio receiver with an intermediate frequency of 455 kHz is tuned to a
station operating at 1200 KHz. The associated image frequency is ________ kHz
(a) 1200
(b) 2110
(c) 1100
(d) 455
18. A 10 MHz carrier is frequency modulated with a sinusoidal signal at 500Hz, the
maximum frequency deviation being 50 KHz. The bandwidth required as given by the
Carson‘s rule is
(a) 101kHz (b) 50kHz (c) 105 kHz (d) 100kHz
19. A 1.0 kHz signal is sampled at the rate of 1.8 kHz and the samples are applied to an ideal
rectangular LPF with cut-off frequency of 1.1 kHz, then the output of the filter contains
(a) Only 800 Hz component (b) 800 Hz and 900 Hz components
(c) 800 Hz and 100 Hz components (d) 800Hz, 900 and 100 Hz components
20. In QAM, both ________ of a carrier frequency are varied.
A) frequency and amplitude
B) phase and frequency
C) amplitude and phase
D) none of the above

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 91
21. In _______, the peak amplitude of one signal level is 0; the other is the same as the
amplitude of the carrier frequency.
A) PSK
B) OOK
C) FSK
D) none of the above
22. In _____ transmission, the frequency of the carrier signal is modulated to follow the
changing voltage level (amplitude) of the modulating signal. The peak amplitude and phase
of the carrier signal remain constant, but as the amplitude of the information signal changes,
the frequency of the carrier changes correspondingly.
A) AM
B) PM
C) FM
D) none of the above
23. Analog-to-analog conversion is needed if the available bandwidth is _______.
A) low-pass
B) band-pass
C) either (a) or (b)
D) neither (a) nor (b
24 A constellation diagram shows us the __________ of a signal element, particularly
when we are using two carriers (one in-phase and one quadrature).
A) amplitude and phase
B) amplitude and frequency
C) frequency and phase
D) none of the above
25. Given an AM radio signal with a bandwidth of 10 KHz and the highest-frequency
component at 705 KHz, what is the frequency of the carrier signal?
A) 700 KHz
B) 705 KHz
C) 710 KHz
D) Cannot be determined from given information
26. If the bit rate for an FSK signal is 1200 bps, the baud rate is ________.
A) 300
B) 400
C) 600
D) 1200
27. If the baud rate is 400 for a QPSK signal, the bit rate is ________ bps.
A) 100
B) 400
C) 800
D) 1600
28. Convert the binary number 1011010 to hexadecimal.
A. 5BB. 5F
C. 5AD. 5C
29. The number of bits used to store a BCD digit is:
A. 8B. 4
C. 1D. 2

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 92
30. What is the difference between binary coding and binary coded decimal?
A. Binary coding is pure binary.
B. BCD is pure binary.
C. Binary coding has a decimal format.
D. BCD has no decimal format.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 93
ANSWER
1 b
2 a
3 d
4 d
5 b
6 a
7 a
8 a
9 b
10 c
11 d
12 b
13 d
14 c
15 d
16 b
17 b
18 a
19 a
20 c
21 b
22 c
23 b
24 a
25 a
26 d
27 c
28 c
29 b
30 a

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 94
CHAPTER 5
HARDWARE DESCRIPTION
LANGUAGES
(VHDL & VERILOG HDL)

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 95
VHDL
Introduction
VHDL stands for VHSIC (Very High Speed Integrated Circuits) Hardware Description
Language. In the mid-1980‘s the U.S. Department of Defense and the IEEE sponsored the
development of this hardware description language with the goal to develop very high-speed
integrated circuit. It has become now one of industry‘s standard languages used to describe
digital systems. The other widely used hardware description language is Verilog. Both are
powerful languages that allow you to describe and simulate complex digital systems. A third
HDL language is ABEL (Advanced Boolean Equation Language) which was specifically
designed for Programmable Logic Devices (PLD). ABEL is less powerful than the other two
languages and is less popular in industry. This tutorial deals with VHDL, as described by the
IEEE standard 1076-1993.
Basic Structure of a VHDL file
A digital system in VHDL consists of a design entity that can contain other entities that are
then considered components of the top-level entity. Each entity is modeled by an entity
declaration and an architecture body. One can consider the entity declaration as the interface
to the outside world that defines the input and output signals, while the architecture body
contains the description of the entity and is composed of interconnected entities, processes
and components, all operating concurrently, as schematically shown in Figure 3 below. In a
typical design there will be many such entities connected together to perform the desired
function.
Figure 3: A VHDL entity consisting of an interface (entity declaration) and a body
(architectural description).

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 96
VHDL uses reserved keywords that cannot be used as signal names or identifiers. Keywords
and user-defined identifiers are case insensitive. Lines with comments start with two
adjacent hyphens (--) and will be ignored by the compiler. VHDL also ignores line breaks
and extra spaces. VHDL is a strongly typed language which implies that one has always to
declare the type of every object that can have a value, such as signals, constants and
variables.
Entity Declaration
The entity declaration defines the NAME of the entity and lists the input and output ports.
The general form is as follows,
entity NAME_OF_ENTITY is [ generic generic_declarations);]
port (signal_names: mode type;
signal_names: mode type;
:
signal_names: mode type);
end [NAME_OF_ENTITY] ;
An entity always starts with the keyword entity, followed by its name and the keyword is.
Next are the port declarations using the keyword port. An entity declaration always ends
with the keyword end, optionally [] followed by the name of the entity.
The NAME_OF_ENTITY is a user-selected identifier
signal names consists of a comma separated list of one or more user-selected identifiers that
specify external interface signals.
mode: is one of the reserved words to indicate the signal direction:
in – indicates that the signal is an input
out – indicates that the signal is an output of the entity whose value can only be read by other
entities that use it.
buffer – indicates that the signal is an output of the entity whose value can be read inside the
entity‘s architecture
inout – the signal can be an input or an output.
type: a built-in or user-defined signal type. Examples of types are bit, bit_vector, Boolean,
character, std_logic, and std_ulogic.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 97
bit – can have the value 0 and 1
bit_vector – is a vector of bit values (e.g. bit_vector (0 to 7)
std_logic, std_ulogic, std_logic_vector, std_ulogic_vector: can have 9 values to indicate the
value and strength of a signal. Std_ulogic and std_logic are preferred over the bit or
bit_vector types.
boolean – can have the value TRUE and FALSE
integer – can have a range of integer values
real – can have a range of real values
character – any printing character
time – to indicate time
generic: generic declarations are optional and determine the local constants used for timing
and sizing (e.g. bus widths) the entity. A generic can have a default value. The syntax for a
generic follows,
generic (
constant_name: type [:=value] ;
constant_name: type [:=value] ;
:
constant_name: type [:=value] );
Architecture body
The architecture body specifies how the circuit operates and how it is implemented.
As discussed earlier, an entity or circuit can be specified in a variety of ways, such as
behavioral, structural (interconnected components), or a combination of the above.
The architecture body looks as follows,
architecture architecture_name of NAME_OF_ENTITY is
-- Declarations
-- components declarations
-- signal declarations
-- constant declarations

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 98
-- function declarations
-- procedure declarations
-- type declarations
begin
-- Statements
end architecture_name;
Library and Packages
library and use keywords
A library can be considered as a place where the compiler stores information about a
design project. A VHDL package is a file or module that contains declarations of commonly
used objects, data type, component declarations, signal, procedures and functions that can be
shared among different VHDL models.
We mentioned earlier that std_logic is defined in the package ieee.std_logic_1164 in the ieee
library. In order to use the std_logic one needs to specify the library and package. This is
done at the beginning of the VHDL file using the library and the use keywords as follows:
library ieee;
use ieee.std_logic_1164.all;
The .all extension indicates to use all of the ieee.std_logic_1164 package.
The Xilinx Foundation Express comes with several packages.
ieee Library:
std_logic_1164 package: defines the standard datatypes
std_logic_arith package: provides arithmetic, conversion and comparison functions
for the signed, unsigned, integer, std_ulogic, std_logic and std_logic_vector types
std_logic_unsigned
std_logic_misc package: defines supplemental types, subtypes, constants and
functions for the std_logic_1164 package.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 99
To use any of these one must include the library and use clause:
library ieee;
use ieee.std_logic_1164.all;
use ieee.std_logic_arith.all;
use ieee.std_logic_unsigned.all;
In addition, the synopsis library has the attributes package:
library SYNOPSYS;
use SYNOPSYS.attributes.all;
One can add other libraries and packages. The syntax to declare a package is as follows:
-- Package declaration
package name_of_package is
package declarations
end package name_of_package;
-- Package body declarations
package body name_of_package is
package body declarations
end package body name_of_package;
Lexical Elements of VHDL
Identifiers
Identifiers are user-defined words used to name objects in VHDL models. We have seen
examples of identifiers for input and output signals as well as the name of a design entity
and architecture body. When choosing an identifier one needs to follow these basic rules:
May contain only alpha-numeric characters (A to Z, a to z, 0-9) and the
underscore (_) character
The first character must be a letter and the last one cannot be an underscore.
An identifier cannot include two consecutive underscores.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 100
An identifier is case insensitive (ex. And2 and AND2 or and2 refer to the same
object)
An identifier can be of any length.
Examples of valid identifiers are: X10, x_10, My_gate1.
Some invalid identifiers are: _X10, my_gate@input, gate-input.
The above identifiers are called basic identifiers. The rules for these basic identifiers are often
too restrictive to indicate signals. For example, if one wants to indicate an active low signal
such as an active low RESET, one cannot call it /RESET. In order to overcome these
limitations, there are a set of extended identifier rules which allow identifiers with any
sequence of characters.
An extended identifier is enclosed by the backslash, ―\‖, character.
An extended identifier is case sensitive.
An extended identifier is different from reserved words (keywords) or any
basic identifier (e.g. the identifier \identity\ is allowed)
Inside the two backslashes one can use any character in any order, except that
a backslash as part of an extended identifier must be indicated by an additional
backslash. As an example, to use the identifier BUS:\data, one writes: \BUS:\data\
Extended identifiers are allowed in the VHDL-93 version but not in VHDL-87
Some examples of legal identifiers are:
Input, \Input\, \input#1\, \Rst\\as\
Keywords (Reserved words)
Certain identifiers are used by the system as keywords for special use such as specific
constructs. These keywords cannot be used as identifiers for signals or objects we define. We
have seen several of these reserved words already such as in, out, or, and, port, map, end, etc.
Keywords are often printed in boldface, as is done in this tutorial. For a list of all the

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 101
keywords click on complete keyword list. Extended identifiers can make use of keywords
since these are considered different words (e.g. the extended identifier \end\ is allowed.
Numbers
The default number representation is the decimal system. VHDL allows integer literals and
real literals. Integer literals consist of whole numbers without a decimal point, while real
literals always include a decimal point. Exponential notation is allowed using the letter ―E‖
or ―e‖. For integer literals the exponent must always be positive. Examples are:
Integer literals: 12 10 256E3 12e+6
Real literals: 1.2 256.24 3.14E-2
The number –12 is a combination of a negation operator and an integer literal.
To express a number in a base different from the base ―10‖, one uses the following
convention: base#number#. A few examples follow.
Base 2: 2#10010# (representing the decimal number ―18‖)
Base 16: 16#12#
Base 8: 8#22#
Base 2: 2#11101# (representing the decimal number ―29‖)
Base 16: 16#1D#
Base 8: 8#35#
To make the readability of large numbers easier, one can insert underscores in the
numbers as long as the underscore is not used at the beginning or the end.
2#1001_1101_1100_0010#
215_123

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 102
Characters, Strings and Bit Strings
To use a character literal in a VHDL code, one puts it in a single quotation mark, as
shown in the examples below:
‗a‘, ‗B‘, ‗,‘
On the other hand, a string of characters are placed in double quotation marks as
shown in the following examples:
―This is a string‖,
―To use a double quotation mark inside a string, use two double quotation marks‖
―This is a ―‖String‖‖.‖
Any printing character can be included inside a string.
A bit-string represents a sequence of bit values. In order to indicate that this is a bit string,
one places the ‗B‘ in front of the string: B‖1001‖. One can also use strings in the hexagonal
or octal base by using the X or O specifiers, respectively. Some examples are:
Binary: B‖1100_1001‖, b‖1001011‖
Hexagonal: X‖C9‖, X‖4b‖
Octal: O‖311‖, o‖113‖
Notice that in the hexadecimal system, each digit represents exactly 4 bits. As a result, the
number b‖1001011‖ is not the same as X‖4b‖ since the former has only 7 bits while the latter
represents a sequence 8 bits. For the same reason, O‖113‖ (represents 9 bits) is not the same
sequence as X‖4b‖ (represents 8 bits).
Data Objects: Signals, Variables and Constants
A data object is created by an object declaration and has a value and type associated
with it. An object can be a Constant, Variable, Signal or a File. Up to now we have seen
signals that were used as input or output ports or internal nets. Signals can be considered
wires in a schematic that can have a current value and future values, and that are a function
of the signal assignment statements. On the other hand, Variables and Constants are used to
model the behavior of a circuit and are used in processes, procedures and functions, similarly
as they would be in a programming language. Following is a brief discussion of each class of
objects.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 103
Constant
A constant can have a single value of a given type and cannot be changed during the
simulation. A constant is declared as follows,
constant list_of_name_of_constant: type [ := initial value] ;
where the initial value is optional. Constants can be declared at the start of an architecture
and can then be used anywhere within the architecture. Constants declared within a process
can only be used inside that specific process.
constant RISE_FALL_TME: time := 2 ns;
constant DELAY1: time := 4 ns;
constant RISE_TIME, FALL_TIME: time:= 1 ns;
constant DATA_BUS: integer:= 16;
Variable
A variable can have a single value, as with a constant, but a variable can be updated
using a variable assignment statement. The variable is updated without any delay as soon as
the statement is executed. Variables must be declared inside a process (and are local to the
process). The variable declaration is as follows:
variable list_of_variable_names: type [ := initial value] ;
A few examples follow:
variable CNTR_BIT: bit :=0;
variable VAR1: boolean :=FALSE;
variable SUM: integer range 0 to 256 :=16;
variable STS_BIT: bit_vector (7 downto 0);
The variable SUM, in the example above, is an integer that has a range from 0 to 256
with initial value of 16 at the start of the simulation. The fourth example defines a bit vector
or 8 elements: STS_BIT(7), STS_BIT(6),… STS_BIT(0).

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 104
A variable can be updated using a variable assignment statement such as
Variable_name := expression;
As soon as the expression is executed, the variable is updated without any delay.
Signal
Signals are declared outside the process using the following statement:
signal list_of_signal_names: type [ := initial value] ;
signal SUM, CARRY: std_logic;
signal CLOCK: bit;
signal TRIGGER: integer :=0;
signal DATA_BUS: bit_vector (0 to 7);
signal VALUE: integer range 0 to 100;
Signals are updated when their signal assignment statement is executed, after a
certain delay, as illustrated below,
SUM <= (A xor B) after 2 ns;
If no delay is specified, the signal will be updated after a delta delay. One can also
specify multiple waveforms using multiple events as illustrated below,
signal wavefrm : std_logic;
wavefrm <= ‗0‘, ‗1‘ after 5ns, ‗0‘ after 10ns, ‗1‘ after 20 ns;
It is important to understand the difference between variables and signals, particularly how it
relates to when their value changes. A variable changes instantaneously when the variable
assignment is executed. On the other hand, a signal changes a delay after the assignment
expression is evaluated. If no delay is specified, the signal will change after a delta delay.
This has important consequences for the updated values of variables and signals. Lets
compare the two files in which a process is used to calculate the signal RESULT [7].

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 105
Data types
Each data object has a type associated with it. The type defines the set of values that
the object can have and the set of operations that are allowed on it. The notion of type is key
to VHDL since it is a strongly typed language that requires each object to be of a certain type.
In general one is not allowed to assign a value of one type to an object of another data type
(e.g. assigning an integer to a bit type is not allowed). There are four classes of data types:
scalar, composite, access and file types. The scalar types represent a single value and are
ordered so that relational operations can be performed on them. The scalar type includes
integer, real, and enumerated types of Boolean and Character. Examples of these will be
given further on.
Data Types defined in the Standard Package
VHDL has several predefined types in the standard package as shown in the table below. To
use this package one has to include the following clause:
library std, work;
use std.standard.all;
Types defined in the Package Standard of the std Library
Type Range of values Example
bit ‗0‘, ‗1‘ signal A: bit :=1;
bit_vector an array with each element of
type bit
signal INBUS: bit_vector(7
downto 0);
boolean FALSE, TRUE variable TEST: Boolean
:=FALSE‘
character any legal VHDL character (see
package standard); printable
characters must be placed
between single quotes (e.g. ‗#‘)
variable VAL: character :=‘$‘;
file_open_kind* read_mode, write_mode,
append_mode

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 106
file_open_status* open_ok, status_error,
name_error, mode_error
integer range is implementation
dependent but includes at least –
(231
– 1) to +(231
– 1)
constant CONST1: integer :=129;
natural integer starting with 0 up to the
max specified in the
implementation
variable VAR1: natural :=2;
positive integer starting from 1 up the
max specified in the
implementation
variable VAR2: positive :=2;
real* floating point number in the
range of –1.0 x 1038
to +1.0x
1038
(can be implementation
dependent. Not supported by the
Foundation synthesis program.
variable VAR3: real :=+64.2E12;
severity_level note, warning, error, failure
string array of which each element is of
the type character
variable VAR4: string(1 to 12):=
―@$#ABC*()_%Z‖;
time* an integer number of which the
range is implementation defined;
units can be expressed in sec,
ms, us, ns, ps, fs, min and hr. .
Not supported by the Foundation
synthesis program
variable DELAY: time :=5 ns;
* Not supported by the Foundation synthesis program
User-defined Types
One can introduce new types by using the type declaration, which names the type and
specifies its value range. The syntax is
type identifier is type_definition;
Here are a few examples of type definitions,

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 107
Integer types
type small_int is range 0 to 1024;
type my_word_length is range 31 downto 0;
subtype data_word is my_word_length range 7 downto 0;
A subtype is a subset of a previously defined type. The last example above illustrates the use
of subtypes. It defines a type called data_word that is a sybtype of my_word_length of which
the range is restricted from 7 to 0. Another example of a subtype is,
subtype int_small is integer range -1024 to +1024;
Floating-point types
type cmos_level is range 0.0 to 3.3;
type pmos_level is range -5.0 to 0.0;
type probability is range 0.0 to 1.0;
subtype cmos_low_V is cmos_level range 0.0 to +1.8;
Note that floating point data types are not supported by the Xilinx Foundation synthesis
program.
Physical types
The physical type definition includes a units identifier as follows,
type conductance is range 0 to 2E-9
units
mho;
mmho = 1E-3 mho;
umho = 1E-6 mho;
nmho = 1E-9 mho;
pmho = 1E-12 mho;
end units conductance;
Here are some object declarations that use the above types,
variable BUS_WIDTH: small_int :=24;
signal DATA_BUS: my_word_length;
variable VAR1: cmos_level range 0.0 to 2.5;
constant LINE_COND: conductance:= 125 umho;
Notice that a space must be left before the unit name.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 108
The physical data types are not supported by the Xilinx Foundation Express synthesis
program.
In order to use our own types, we need either to include the type definition inside an
architecture body or to declare the type in a package. The latter can be done as follows for a
package called ―my_types‖.
package my_types is
type small_int is range 0 to 1024;
type my_word_length is range 31 downto 0;
subtype data_word is my_word_length is range 7 downto 0;
type cmos_level is range 0.0 to 3.3;
type conductance is range 0 to 2E-9
units
mho;
mmho = 1E-3 mho;
umho = 1E-6 mho;
nmho = 1E-9 mho;
pmho = 1E-12 mho;
end units conductance;
end package my_types;
Enumerated Types
An enumerated type consists of lists of character literals or identifiers. The enumerated type
can be very handy when writing models at an abstract level. The syntax for an enumerated
type is,
type type_name is (identifier list or character literal);
Here are some examples,
type my_3values is (‗0‘, ‗1‘, ‗Z‘);
type PC_OPER is (load, store, add, sub, div, mult, shiftl, shiftr);
type hex_digit is (‗0‘, ‗1‘, ‗2‘, ‗3‘, ‗4‘, ‗5‘, ‗6‘, ‗7‘, 8‘, ‗9‘, ‗A‘, ‗B‘, ‗C‘, ‗D‘, ‗E‘, ‗F‘);
type state_type is (S0, S1, S2, S3);

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 109
Examples of objects that use the above types:
signal SIG1: my_3values;
variable ALU_OP: pc_oper;
variable first_digit: hex_digit :=‘0‘;
signal STATE: state_type :=S2;
If one does not initialize the signal, the default initialization is the leftmost element of the list.
Enumerated types have to be defined in the architecture body or inside a package as shown
in the section above.
An example of an enumerated type that has been defined in the std_logic_1164 package is
the std_ulogic type, defined as follows
type STD_ULOGIC is (
‗U‘,-- uninitialized
‗X‘,-- forcing unknown
‗0‘,-- forcing 0
‗1‘,-- forcing 1
‗Z‘,-- high impedance
‗W‘,-- weak unknown
‗L‘,-- weak 0
‗H‘.-- weak 1
‗-‗);-- don‘t care
In order to use this type one has to include the clause before each entity declaration.
library ieee; use ieee.std_logic_1164.all;
Composite Types: Array and Record
Composite data objects consist of a collection of related data elements in the form of an
array or record. Before we can use such objects one has to declare the composite type first.
Array Type
An array type is declared as follows:
type array_name is array (indexing scheme) of element_type;
type MY_WORD is array (15 downto 0) of std_logic;
type YOUR_WORD is array (0 to 15) of std_logic;
type VAR is array (0 to 7) of integer;
type STD_LOGIC_1D is array (std_ulogic) of std_logic;

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 110
In the first two examples above we have defined a one-dimensional array of elements of the
type std_logic indexed from 15 down to 0, and 0 up to 15, respectively. The last example
defines a one-dimensional array of the type std_logic elements that uses the type std_ulogic
to define the index constraint. Thus this array looks as follows:
Index: ‗U‘ ‗X‘ ‗0‘ ‗1‘ ‗Z‘ ‗W‘ ‗L‘ ‗H‘ ‗-‗
Element:
We can now declare objects of these data types. Some examples are given
signal MEM_ADDR: MY_WORD;
signal DATA_WORD: YOUR_WORD := B―1101100101010110‖;
constant SETTING: VAR := (2,4,6,8,10,12,14,16);
In the first example, the signal MEM_ADDR is an array of 16 bits, initialized to all ‗0‘s. To
access individual elements of an array we specify the index. For example, MEM_ACCR(15)
accesses the left most bit of the array, while DATA_WORD(15) accesses the right most bit of
the array with value ‗0‘. To access a subrange, one specifies the index range,
MEM_ADDR(15 downto 8) or DATA_WORD(0 to 7).
Multidimensional arrays can be declared as well by using a similar syntax as above,
type MY_MATRIX3X2 is array (1 to 3, 1 to 2) of natural;
type YOUR_MATRIX4X2 is array (1 to 4, 1 to 2) of integer;
type STD_LOGIC_2D is array (std_ulogic, std_ulogic) of std_logic;
variable DATA_ARR: MY_MATRIX :=((0,2), (1,3), (4,6), (5,7));
The variable array DATA_ARR will then be initialized to,
0 2
1 3
4 6
5 7
To access an element one specifies the index, e.g. DATA_ARR(3,1) returns the value 4.
The last example defines a 9x9 array or table with an index the elements of the std_ulogic
type.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 111
Sometimes it is more convenient not to specify the dimension of the array when the array
type is declared. This is called an unconstrained array type. The syntax for the array
declaration is,
type array_name is array (type range <>) of element_type;
Some examples are
type MATRIX is array (integer range <>) of integer;
type VECTOR_INT is array (natural range <>) of integer;
type VECTOR2 is array (natural range <>, natural range <>) of std_logic;
The range is now specified when one declares the array object,
variable MATRIX8: MATRIX (2 downto -8) := (3, 5, 1, 4, 7, 9, 12, 14, 20, 18);
variable ARRAY3x2: VECTOR2 (1 to 4, 1 to 3)) := ((‗1‘,‘0‘), (‗0‘,‘-‗), (1, ‗Z‘));
Record Type
A second composite type is the records type. A record consists of multiple elements that may
be of different types. The syntax for a record type is the following:
type name is
record
identifier :subtype_indication;
:
identifier :subtype_indication;
end record;
As an example,
type MY_MODULE is
record
RISE_TIME :time;
FALL_TIME: time;
SIZE: integer range 0 to 200;
DATA: bit_vector (15 downto 0);
end record;
signal A, B: MY_MODULE;

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 112
To access values or assign values to records, one can use one of the following methods:
A.RISE_TIME <= 5ns;
A.SIZE <= 120;
B <= A;
Type Conversions
Since VHDL is a strongly typed language one cannot assign a value of one data type to a
signal of a different data type. In general, it is preferred to the same data types for the signals
in a design, such as std_logic (instead of a mix of std_logic and bit types). Sometimes one
cannot avoid using different types. To allow assigning data between objects of different
types, one needs to convert one type to the other. Fortunately there are functions available in
several packages in the ieee library, such as the std_logic_1164 and the std_logic_arith
packages. As an example, the std_logic_1164 package allows the following conversions:
Conversions supported by std_logic_1164 package
Conversion Function
std_ulogic to bit to_bit(expression)
std_logic_vector to bit_vector to_bitvector(expression)
std_ulogic_vector to bit_vector to_bitvector(expression)
bit to std_ulogic To_StdULogic(expression)
bit_vector to std_logic_vector To_StdLogicVector(expression)
bit_vector to std_ulogic_vector To_StdUlogicVector(expression)
std_ulogic to std_logic_vector To_StdLogicVector(expression)
std_logic to std_ulogic_vector To_StdUlogicVector(expression)
The IEEE std_logic_unsigned and the IEEE std_logic_arith packages allow additional
conversions such as from an integer to std_logic_vector and vice versa.
The syntax of a type conversion is as follows:
type_name (expression);

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 113
In order for the conversion to be legal, the expression must return a type that can be
converted into the type type_name. Here are the conditions that must be fulfilled for the
conversion to be possible.
Type conversions between integer types or between similar array types are
possible
Conversion between array types is possible if they have the same length
and if they have identical element types or convertible element types.
Enumerated types cannot be converted.
Attributes
VHDL supports 5 types of attributes. Predefined attributes are always applied to a prefix such
as a signal name, variable name or a type. Attributes are used to return various types of
information about a signal, variable or type. Attributes consist of a quote mark (‗) followed
by the name of the attribute.
Signal attributes
The following table gives several signal attributes.
Attribute Function
signal_name’event returns the Boolean value True if an event on the
signal occurred, otherwise gives a False
signal_name’active returns the Boolean value True there has been a
transaction (assignment) on the signal, otherwise
gives a False
signal_name’transaction returns a signal of the type ―bit‖ that toggles (0 to 1
or 1 to 0) every time there is a transaction on the
signal.
signal_name’last_event returns the time interval since the last event on the
signal
signal_name’last_active returns the time interval since the last transaction
on the signal

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 114
signal_name’last_value gives the value of the signal before the last event
occurred on the signal
signal_name’delayed(T) gives a signal that is the delayed version (by time
T) of the original one. [T is optional, default T=0]
signal_name’stable(T) returns a Boolean value, True, if no event has
occurred on the signal during the interval T,
otherwise returns a False. [T is optional, default
T=0]
signal_name’quiet(T) returns a Boolean value, True, if no transaction has
occurred on the signal during the interval T,
otherwise returns a False. [T is optional, default
T=0]
An example of an attribute is
if (CLOCK’event and CLOCK=‘1‘) then …
This expression checks for the arrival of a positive clock edge. To find out how much time
has passed since the last clock edge, one can use the following attribute:
CLOCK‘last_event
Scalar attributes
Several attributes of a scalar type, scalar-type, are supported. The following table shows
some of these attributes.
Attribute Value
scalar_type’left returns the first or leftmost value of scalar-
type in its defined range
scalar_type’right returns the last or rightmost value of scalar-
type in its defined range
scalar_type’low returns the lowest value of scalar-type in its
defined range
scalar_type’high returns the greatest value of scalar-type in
its defined range

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 115
scalar_type’ascending True if T is an ascending range, otherwise
False
scalar_type‘value(s) returns the value in T that is represented by
s (s stands for string value).
Here are a few examples.
type conductance is range 1E-6 to 1E3
units mho;
end units conductance;
type my_index is range 3 to 15;
type my_levels is (low, high, dontcare, highZ);
conductance‘right returns:1E3
conductance‘high1E3
conductance‘low1E-6
my_index‘left3
my_index‘value(5)―5‖
my_levels‘leftlow
my_levels‘lowlow
my_levels‘highhighZ
my_levels‘value(dontcare)―dontcare‖
Array attributes
By using array attributes one can return an index value corresponding to the array range.
The following attributes are supported.
Attribute Returns
MATRIX‗left(N)
MATRIX‘right(N)
MATRIX‘high(N)
left-most element index
right-most index
upper bound

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 116
MATRIX‘low(N)
MATRIX‘length(N)
MATRIX‘range(N)
MATRIX‘reverse_range(N)
MATRIX‘ascending(N)
lower bound
the number of elements
range
reverse range
a Boolean value TRUE if index is an
ascending range, otherwise FALSE
The number N between parentheses refers to the dimension. For a one-dimensional array, one
can omit the number N as shown in the examples below. Lets assume the following arrays,
declared as follows:
type MYARR8x4 is array (8 downto 1, 0 to 3) of boolean;
type MYARR1 is array (-2 to 4) of integer;
MYARR1‘leftreturns: -2
MYARR1‘right4
MYARR1‘high4
MYARR1‘reverse_range4 downto to -2
MYARR8x4‘left(1)8
MYARR8x4‘left(2)0
MYARR8x4‘right(2)3
MYARR8x4‘high(1)8
MYARR8x4‘low(1)1
MYARR8x4‘ascending(1) False
Operators
VHDL supports different classes of operators that operate on signals, variables and
constants. The different classes of operators are summarized below.
Class
1. Logical operators and or nand nor xor xnor
2. Relational = /= < <= > >=

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 117
operators
3. Shift operators sll srl sla sra rol ror
4.Addition operators + = &
5. Unary operators + -
6. Multiplying op. * / mod rem
7. Miscellaneous op. ** abs not
The order of precedence is the highest for the operators of class 7, followed by class 6 with
the lowest precedence for class 1. Unless parentheses are used, the operators with the highest
precedence are applied first. Operators of the same class have the same precedence and are
applied from left to right in an expression. As an example, consider the following
std_ulogic_vectors, X (=‘010‘), Y(=‘10‘), and Z (‗10101‘). The expression
not X & Y xor Z rol 1
is equivalent to ((not X) & Y) xor (Z rol 1) = ((101) & 10) xor (01011) =(10110) xor
(01011) = 11101. The xor is executed on a bit-per-bit basis.
Behavioral Modeling: Sequential Statements
As discussed earlier, VHDL provides means to represent digital circuits at different levels of
representation of abstraction, such as the behavioral and structural modeling. In this section
we will discuss different constructs for describing the behavior of components and circuits in
terms of sequential statements. The basis for sequential modeling is the process construct. As
you will see, the process construct allows us to model complex digital systems, in particular
sequential circuits.
Process
A process statement is the main construct in behavioral modeling that allows you to use
sequential statements to describe the behavior of a system over time. The syntax for a process
statement is

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 118
[process_label:] process [ (sensitivity_list) ] [is]
[ process_declarations]
begin
list of sequential statements such as:
signal assignments
variable assignments
case statement
exit statement
if statement
loop statement
next statement
null statement
procedure call
wait statement
end process [process_label];
A process is declared within an architecture and is a concurrent statement. However, the
statements inside a process are executed sequentially. Like other concurrent statements, a
process reads and writes signals and values of the interface (input and output) ports to
communicate with the rest of the architecture. One can thus make assignments to signals that
are defined externally (e.g. interface ports) to the process, such as the Q output of the flip-
flop in the above example. The expression CLK‘event and CLK = ‗1‘ checks for a positive
clock edge (clock event AND clock high).
The sensitivity list is a set of signals to which the process is sensitive. Any change in the
value of the signals in the sensitivity list will cause immediate execution of the process. If the
sensitivity list is not specified, one has to include a wait statement to make sure that the
process will halt. Notice that one cannot include both a sensitivity list and a wait statement.
Variables and constants that are used inside a process have to be defined in the
process_declarations part before the keyword begin. The keyword begin signals the start of
the computational part of the process. The statements are sequentially executed, similarly as
a conventional software program. It should be noted that variable assignments inside a
process are executed immediately and denoted by the ―:=‖ operator. This is in contrast to
signal assignments denoted by ―<=‖ and which changes occur after a delay. As a result,
changes made to variables will be available immediately to all subsequent statements within

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 119
the same process. For an example that illustrates the difference between signal and variable
assignments see the section on Data Types (difference between signals and variables).
If Statements
The if statement executes a sequence of statements whose sequence depends on one or more
conditions. The syntax is as follows:
if condition then
sequential statements
[elsif condition then
sequential statements ]
[else
sequential statements ]
end if;
Each condition is a Boolean expression. The if statement is performed by checking each
condition in the order they are presented until a ―true‖ is found. Nesting of if statements is
allowed.
Case statements
The case statement executes one of several sequences of statements, based on the value of a
single expression. The syntax is as follows,
case expression is
when choices =>
sequential statements
when choices =>
sequential statements
-- branches are allowed
[ when others => sequential statements ]
end case;
The expression must evaluate to an integer, an enumerated type of a one-dimensional array,
such as a bit_vector. The case statement evaluates the expression and compares the value to
each of the choices. The when clause corresponding to the matching choice will have its
statements executed. The following rules must be adhered to:

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 120
no two choices can overlap (i.e. each choice can be covered only once)
if the ―when others" choice is not present, all possible values of the expression must
be covered by the set of choices.
Loop statements
A loop statement is used to repeatedly execute a sequence of sequential statements. The
syntax for a loop is as follows:
[ loop_label :]iteration_scheme loop
sequential statements
[next [label] [when condition];
[exit [label] [when condition];
end loop [loop_label];
Labels are optional but are useful when writing nested loops. The next and exit statement are
sequential statements that can only be used inside a loop.
The next statement terminates the rest of the current loop iteration and execution will
proceed to the next loop iteration.
The exit statement skips the rest of the statements, terminating the loop entirely, and
continues with the next statement after the exited loop.
There are three types of iteration schemes:
basic loop
while … loop
for … loop
Basic Loop statement
This loop has no iteration scheme. It will be executed continuously until it encounters an exit
or next statement.
[ loop_label :] loop
sequential statements
[next [label] [when condition];
[exit [label] [when condition];
end loop [ loop_label];

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 121
The basic loop (as well as the while-loop) must have at least one wait statement.
While-Loop statement
The while … loop evaluates a Boolean iteration condition. When the condition is TRUE, the
loop repeats, otherwise the loop is skipped and the execution will halt. The syntax for the
while…loop is as follows,
[ loop_label :] while condition loop
sequential statements
[next [label] [when condition];
[exit [label] [when condition];
end loop[ loop_label ];
The condition of the loop is tested before each iteration, including the first iteration. If it is
false, the loop is terminated.
For-Loop statement
The for-loop uses an integer iteration scheme that determines the number of iterations. The
syntax is as follows,
[ loop_label :] for identifier in range loop
sequential statements
[next [label] [when condition];
[exit [label] [when condition];
end loop[ loop_label ];
The identifier (index) is automatically declared by the loop itself, so one does not
need to declare it separately. The value of the identifier can only be read inside the
loop and is not available outside its loop. One cannot assign or change the value of the
index. This is in contrast to the while-loop whose condition can involve variables that
are modified inside the loop.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 122
The range must be a computable integer range in one of the following forms, in which
integer_expression must evaluate to an integer:
o integer_expression to integer_expression
o integer_expression downto integer_expression
Next and Exit Statement
The next statement skips execution to the next iteration of a loop statement and proceeds with
the next iteration. The syntax is
next [label] [when condition];
The when keyword is optional and will execute the next statement when its condition
evaluates to the Boolean value TRUE.
The exit statement skips the rest of the statements, terminating the loop entirely, and
continues with the next statement after the exited loop. The syntax is as follows:
exit [label] [when condition];
The when keyword is optional and will execute the next statement when its condition
evaluates to the Boolean value TRUE.
Notice that the difference between the next and exit statement, is that the exit statement
terminates the loop.
Wait statement
The wait statement will halt a process until an event occurs. There are several forms of the
wait statement,
wait until condition;
wait for time expression;
wait on signal;
wait;

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 123
The Xilinx Foundation Express has implemented only the first form of the wait statement.
The syntax is as follows,
wait until signal = value;
wait until signal’event and signal = value;
wait until not signal’stable and signal = value;
The condition in the ―wait until‖ statement must be TRUE for the process to resume. A few
examples follow.
wait until CLK=‘1‘;
wait until CLK=‘0‘;
wait until CLK‘event and CLK=‘1‘;
wait until not CLK‘stable and CLK=‘1‘;
For the first example the process will wait until a positive-going clock edge occurs, while for
the second example, the process will wait until a negative-going clock edge arrives. The last
two examples are equivalent to the first one (positive-edge or 0-1 transitions). The hardware
implementation for these three statements will be identical.
It should be noted that a process that contains a wait statement can not have a sensitivity list.
If a process uses one or more wait statements, the Foundation Express synthesizer will use
sequential logic. The results of the computations are stored in flip-flops.
Null statement
The null statement states that no action will occur. The syntax is as follows,
null;
It can be useful in a case statement where all choices must be covered, even if some of them
can be ignored.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 124
Dataflow Modeling – Concurrent Statements
Behavioral modeling can be done with sequential statements using the process construct or
with concurrent statements. The first method was described in the previous section and is
useful to describe complex digital systems. In this section, we will use concurrent statements
to describe behavior. This method is usually called dataflow modeling. The dataflow
modeling describes a circuit in terms of its function and the flow of data through the circuit.
This is different from the structural modeling that describes a circuit in terms of the
interconnection of components.
Concurrent signal assignments are event triggered and executed as soon as an event on one of
the signals occurs. In the remainder of the section we will describe several concurrent
constructs for use in dataflow modeling.
Simple Concurrent signal assignments.
We have discussed several concurrent examples earlier in the tutorial. In this section we will
review the different types of concurrent signal assignments.
A simple concurrent signal assignment is given in the following examples,
Sum <= (A xor B) xor Cin;
Carry <= (A and B);
Z <= (not X) or Y after 2 ns;
The syntax is as follows:
Target_signal <= expression;
in which the value of the expression transferred to the target_signal. As soon as an event
occurs on one of the signals, the expression will be evaluated. The type of the target_signal
has to be the same as the type of the value of the expression.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 125
Conditional Signal assignments
The syntax for the conditional signal assignment is as follows:
Target_signal <= expression when Boolean_condition else
expression when Boolean_condition else
:
expression;
The target signal will receive the value of the first expression whose Boolean condition is
TRUE. If no condition is found to be TRUE, the target signal will receive the value of the
final expression. If more than one condition is true, the value of the first condition that is
TRUE will be assigned.
Selected Signal assignments
The selected signal assignment is similar to the conditional one described above. The syntax
is as follows,
with choice_expression select
target_name <= expression when choices,
target_name <= expression when choices,
:
target_name <= expression when choices;
The target is a signal that will receive the value of an expression whose choice includes the
value of the choice_expression. The expression selected is the first with a matching choice.
The choice can be a static expression (e.g. 5) or a range expression (e.g. 4 to 9). The
following rules must be followed for the choices:
No two choices can overlap
All possible values of choice_expression must be covered by the set of choices, unless
an others choice is present.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 126
Structural Modeling
Structural modeling was described briefly in the section Structural Modeling in ―Basic
Structure of a VHDL file‖. A structural way of modeling describes a circuit in terms of
components and its interconnection. Each component is supposed to be defined earlier (e.g. in
package) and can be described as structural, a behavioral or dataflow model. At the lowest
hierarchy each component is described as a behavioral model, using the basic logic operators
defined in VHDL. In general structural modeling is very good to describe complex digital
systems, though a set of components in a hierarchical fashion.
A structural description can best be compared to a schematic block diagram that can be
described by the components and the interconnections. VHDL provides a formal way to do
this by
Declare a list of components being used
Declare signals which define the nets that interconnect components
Label multiple instances of the same component so that each instance is
uniquely defined.
The components and signals are declared within the architecture body,
architecture architecture_name of NAME_OF_ENTITY is
-- Declarations
component declarations
signal declarations
begin
-- Statements
component instantiation and connections
:
end architecture_name;

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 127
Component declaration
Before components can be instantiated they need to be declared in the architecture
declaration section or in the package declaration. The component declaration consists of the
component name and the interface (ports). The syntax is as follows:
component component_name [is]
[port (port_signal_names: mode type;
port_signal_names: mode type;
:
port_signal_names: mode type);]
end component [component_name];
The component name refers to either the name of an entity defined in a library or an entity
explicitly defined in the VHDL file (see example of the four bit adder).
The list of interface ports gives the name, mode and type of each port, similarly as is done in
the entity declaration.
A few examples of component declaration follow:
component OR2
port (in1, in2: in std_logic;
out1: out std_logic);
end component;
component PROC
port (CLK, RST, RW, STP: in std_logic;
ADDRBUS: out std_logic_vector (31 downto 0);
DATA: inout integer range 0 to 1024);
component FULLADDER
port(a, b, c: in std_logic;
sum, carry: out std_logic);

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 128
end component;
As mentioned earlier, the component declaration has to be done either in the architecture
body or in the package declaration. If the component is declared in a package, one does not
have to declare it again in the architecture body as long as one uses the library and use
clause.
Component Instantiation and interconnections
The component instantiation statement references a component that can be
Previously defined at the current level of the hierarchy or
Defined in a technology library (vendor‘s library).
The syntax for the components instantiation is as follows,
instance_name : component name
port map (port1=>signal1, port2=> signal2,… port3=>signaln);
The instance name or label can be any legal identifier and is the name of this particular
instance. The component name is the name of the component declared earlier using the
component declaration statement. The port name is the name of the port and signal is the
name of the signal to which the specific port is connected. The above port map associates the
ports to the signals through named association. An alternative method is the positional
association shown below,
port map (signal1, signal2,…signaln);
in which the first port in the component declaration corresponds to the first signal, the second
port to the second signal, etc. The signal position must be in the same order as the declared
component‘s ports. One can mix named and positional associations as long as one puts all
positional associations before the named ones. The following examples illustrates this,

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 129
component NAND2
port (in1, in2: in std_logic;
out1: out std_logic);
end component;
signal int1, int2, int3: std_logic;
architecture struct of EXAMPLE is
U1: NAND2 port map (A,B,int1);
U2: NAND2 port map (in2=>C, in2=>D, out1=>int2);
U3: NAND3 port map (in1=>int1, int2, Z);
…..

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 130
Verilog HDL
Verilog differs from regular programming languages in 3 main aspects: (1) simulation
time concept, (2) multiple threads, and (3) some basic circuit concepts like network
connections and primitive gates.
Modules
In Verilog, circuit components are designed inside a module. Modules can contain both
structural and behavioral statements. Structural statements represent circuit components like
logic gates, counters, and microprocessors. Behavioral level statements are programming
statements that have no direct mapping to circuit components like loops, if-then statements,
and stimulus vectors which are used to exercise a circuit.
A module starts with the keyword module followed by an optional module name and an
optional port list. The key word endmodule ends a module.
`timescale 1ns / 1ps
//create a NAND gate out of an AND and an Invertor
module some_logic_component (c, a, b);
// declare port signals
output c;
input a, b;
// declare internal wire
wire d;
//instantiate structural logic gates
and a1(d, a, b); //d is output, a and b are inputs
not n1(c, d); //c is output, d is input
endmodule
//test the NAND gate
module test_bench; //module with no ports
reg A, B;
wire C;
//instantiate your circuit
some_logic_component S1(C, A, B);

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 131
//Behavioral code block generates stimulus to test circuit
initial
begin
A = 1'b0; B = 1'b0;
#50 $display("A = %b, B = %b, Nand output C = %b \n", A, B, C);
A = 1'b0; B = 1'b1;
#50 $display("A = %b, B = %b, Nand output C = %b \n", A, B, C);
A = 1'b1; B = 1'b0;
#50 $display("A = %b, B = %b, Nand output C = %b \n", A, B, C);
A = 1'b1; B = 1'b1;
#50 $display("A = %b, B = %b, Nand output C = %b \n", A, B, C);
end
endmodule
Structural Design with Gate Primitives and the Delay operator
Verilog defines some basic logic gates as part of the language. For example:
nand a1(out1, in1, in2); //2-input NAND gate
nand a2(out1, in1, in2, in3, in4, in5); //5-input NAND gate
By default the timing delay for the gate primitives is zero time. You can define the rising
delay, falling delay using the #(rise, fall) delay operator. And for tri-state gates you can also
define the turn-off delay (transition to high impedance state Z) by using the #(rise, fall, off)
delay operator. For example
notif0 #(10,11,27) inv2(c,d,control) //rise=10, fall=11, off=27(not if control=0)
nor #(10,11) nor1(c,a,b); //rise=10, fall=11 (nor gate)
xnor #(10) xnor1(i,g,h); //rise=10, fall=10 (xnor gate)
Also each of the 3 delays can be defined to have minimum, typical, and a maximum value
using the a colon to separate the values like 8:10:12 instead of 10 in the above examples. At
run time, the Verilog simulator looks for to see if the +mindelay, +typdelay, or +maxdelay
option has been defined so that it will know which of the 3 time values to use. If none of the
options are specified then the typical value is used.
// min:typ:max values defined for the (rise, fall) delays
or #(8:10:12, 10:11:13) or1(c,a,b);
The delay operator has one subtle side effect: it swallows narrow input pulses. Normally, the
delay operator causes the output response of a gate to be delayed a certain amount of time.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 132
However if the input pulse width is shorter then the overall delay of the gate then the change
will not be shown on the output.
Here is a list of logic primitives defined for Verilog:
Gate Parameter List Examples
nand nor and
or xor xnor
scalable, requires at
least 2 inputs(output,
input1, input2, � ,
inputx)
and a1(C,A,B);nand na1(out1,in1,in2,in3,in4);nor
#(5) n1(D,A,B);//delay = 5 time unitsxor #(3,4,5)
x1(E,A,B);//rise,fall,off delaysnor #(3:4:5)
n2(F,A,B);//min:typ:max of delays
not buf (output, input) not inv1(c,a);
notif0bufif0
control signal active
low(output, input,
control)
notif0 inv2(c,a, control);
notif1bufif1
control signal active
high(output, input,
control)
not inv1(c,a, control);
Structural Design with Assignment Statements
If you have a lot of random logic, the gate primitives of the previous section are tedious to
use because all the internal wires must be declared and hooked up correctly. Sometimes it is
easier to just describe a circuit using a single Boolean equation. In Verilog, Boolean
equations which have similar timing properties as the gate primitives are defined using a
continuous assignment statement.
For example,:
wire d;
and a1(d, a, b);
not n1(c, d);
can be replaced with one statement:
assign c = !(a && b); //notice that wire d was not used here
Assignments can also be made during the declaration of a wire. In this case the assign
keyword is implicitly assumed to be there for example:
wire d;
assign d = a || b; //continuous assignment

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 133
wire d = a || b; //implicit continuous assignment
By default the timing delay for assignment statements is zero time. You can define a
propagation delay using the #delay operator just like we did for the gate primitives. The
following examples have the exact same timing.
wire c;
assign #5 c = a && b; //delay in the continuous assignment
wire #5 c = a && b; //delay in the implicit assignment
wire #5 c; //delay in the wire declaration
assign c = a && b;
To demonstrate the pulse swallowing effect of the delays operator, consider the following
senario. In the above examples, if input a changed value at time 10 (and held its value for at
least 5 time units), then the output c would change values at time 15. If input a had a value
pulse that was shorter then the propagation delay of the assignment then the value on a
would not be passed to the output.
The delay operator can also use the full rise, fall, and off delays and each delay can have a
minimum:typical: maximum value. The following is a valid line of code.
and #(8:10:12, 10:11:13, 26:27:29) a1(c,a,b); //min:typ:max of (rise,fall,off)
Appendix A defines all of the operators that can be used in an assignment statement.
Structural Design with using Modules
Verilog supports hierarchical design by allowing modules to instantiate other modules. For
example
module test_bench;
...
some_logic_component S1(C, A, B); //instantiate a some_logic_component module
...
endmodule
By default the timing inside a module is controlled by the module itself. However, modules
can be defined to have parameterized delays similar to the #(4,5) delay operator used with
gate primitives. In the module definition, use the parameter keyword to create delay
variables. Parameters can also be used to change other scalar values in the module. When
the module is instantiated then you can choose to override the delay values using the

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 134
#(parameter) notation. For example:
module some_logic_component (c, a, b);
... //some code
parameter andDelay = 2; //default delays
parameter invDelay = 2;
and #andDelay a1(d, a, b); //using parameter delays
not #invDelay n1(c, d);
endmodule
module test_bench; //module with no ports
...
some_logic_component #(5,4) S3(E, A, B); //override andDelay=5, invDelay=4
some_logic_component #(5) S2(D, A, B); //override andDelay=5, invDelay=2
some_logic_component S1(C, A, B); //uses default delays
....
endmodule
Modules also support a special kind of timing called specify blocks which can be used in
conjunction with SDF analyzers. Specify blocks also support continuous setup and hold
checking.
Behavioral Design with Initial and Always blocks
Behavioral code is used to describe circuits at a more abstract level then the structural level
statements we have studied. All Behavioral code occurs within either an initial block or in an
always block. A module can contain several initial and always blocks. These behavioral
blocks contain statements that control simulation time, data flow statements (like if-then and
case statements), and blocking and non-blocking statements.
An initial block executes once during a simulation. Initial blocks are usually used to
initialize variables and to describe stimulus waveforms which exercise which drive the
simulation.
An always block continuously repeats its execution during a simulation. Always blocks
usually contain behavioral code that models the actual circuit operation.
During a simulation each always and each initial block begin to execute at time zero. Each
block executes concurrently with each structural statement and all the other behavioral

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 135
blocks. The following example shows a behavioral SRAM model. The initial block sets the
memory cells to zero at startup. The always block executes each time there is a change on
the write control line, the chip select line, or the address bus. As an exercise, copy and paste
this code into a verilog file and write a test bench to exercise the model. If you are using
VeriLogger Pro then you can draw a test bench.
//SRAM Model
module sram(CSB,WRB,ABUS,DATABUS);
input CSB; // active low chip select
input WRB; // active low write control
input [11:0] ABUS; // 12-bit address bus
inout [7:0] DATABUS; // 8-bit data bus
//** internal signals
reg [7:0] DATABUS_driver;
wire [7:0] DATABUS = DATABUS_driver;
reg [7:0] ram[0:4095]; // memory cells
integer i;
initial //initialize all RAM cells to 0 at startup
begin
DATABUS_driver = 8'bzzzzzzzz;
for (i=0; i < 4095; i = i + 1)
ram[i] = 0;
end
always @(CSB or WRB or ABUS)
begin
if (CSB == 1'b0)
begin
if (WRB == 1'b0) //Start: latch Data on rising edge of CSB or WRB
begin
DATABUS_driver <= #10 8'bzzzzzzzz;
@(posedge CSB or posedge WRB);
$display($time," Writing %m ABUS=%b DATA=%b",ABUS,DATABUS);

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 136
ram[ABUS] = DATABUS;
end
if (WRB == 1'b1) //Reading from sram (data becomes valid after 10ns)
begin
#10 DATABUS_driver = ram[ABUS];
$display($time," Reading %m ABUS=%b DATA=%b",ABUS,DATABUS_driver);
end
end
else //sram unselected, stop driving bus after 10ns
begin
DATABUS_driver <= #10 8'bzzzzzzzz;
end
end
endmodule
Structural Data Types: wire and reg
Verilog supports structural data types called nets which model hardware connections
between circuit components. The two most common structural data types are wire and reg.
The wire nets act like real wires in circuits. The reg type hold their values until another
value is put on them, just like a register hardware component. The declarations for wire
and reg signals are inside a module but outside any initial or always block. The initial state
of a reg is x unknown, and the initial state of a wire is z.
Ports:Modules communicate with each other through ports, the signals listed in the
parameter list at the top of the module. Ports can be of type in, out, and inout.
Here are 3 simplistic rules for matching the structural data type to the type of port:
1. Use reg as the outputs of Behavioral blocks. If you us a wire then the value will
never be seen by other blocks.
2. Use wire for all inputs, inouts, and most outputs of Structural elements.
3. If you need a special strength type operation use special net keyword wand, wor,
tir, triand, trior, trireg.
Behavioral Data Types: integer, real, and time
The types in integer and real are convenient data types to use for counting in behavioral
code blocks. These data types act like their counter parts in other programming languages.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 137
If you eventually plan to synthesize your behavioral code then you would probably want to
avoid using these data types because they often synthesize large circuits.
The data type time can hold a special simulator value called simulation time which is
extracted from the system function $time. The time information can be used to help you
debug your simulations.
..... //code fragment from inside a module
integer i, y;
real a;
real b = 3.5;
real c = 4;
time simulationTime;
initial
begin
y = 4;
i = 5 + y;
c = c + 3.5;
a = 5.3e4;
simulationTime = $time;
$display("integer y = %d, i = %f \n", y, i);
$display("reals c = %f, a = %e, b= %g \n", c, a, b);
$display("time simulationTime = %t \n", simulationTime);
End
Number Syntax
Numbers in verilog are in the following format
'
The size is always specified as a decimal number. If no is specified then the default size is
at least 32bits and may be larger depending on the machine. Valid base formats are 'b , 'B
, 'h , 'H 'd , 'D , 'o , 'O for binary, hexadecimal, decimal, and octal. Numbers consist of
strings of digits (0-9, A-F, a-f, x, X, z, Z). The X's mean unknown, and the Z's mean high
impedance If no base format is specified the number is assumed to be a decimal number.
Some examples of valid numbers are:
2'b10 // 2 bit binary number
'b10 // at least a 32-bit binary number

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 138
3 // at least a 32-bit decimal number
8'hAf // 8-bit hexadecimal
-16'd47 // negative decimal number
Behavioral Design with blocking and non-blocking statements
There are 2 kinds of assignment statements: blocking using the = operator, and non-
blocking using the <= operator. Blocking assignments act like sequential code statements
and execute when they are called. Non-blocking schedule events to happen at some time in
the future. This can be confusing because lines that appear after a non-blocking statement
execute at the same time as the non-blocking statement. Here are some examples:
#5 x = 1'b0; // blocks for 5 time units, applies value to x, then next line goes
y = 1'b1; // blocks, sets y to 1 now, then next statement goes
y <= #3 1'b0; // evaluates now, schedules apply y=0 in 3 time units, and next line goes
#5 x <= y; // waits for 5 time units, evaluates,
// schedules apply at end of current time, and next line goes
The following two code blocks are not equivalent:
// Section 1: Blocking statements execute sequentially
#5 a = b; // waits 5 time units, evaluates and applies value to a
c = d; // evaluates and applies value to c
// Section 2: Non-Blocking statements execute concurrently
#5 a <= b; // waits 5 time units, evaluates, schedules apply for end of current time
c <= d; // evaluate, schedules apply for end of current time
// At end of current time both a and c receive their values
Arrays, Vectors, and Memories
Verilog supports three similar data structures called Arrays, Vectors, and Memories.
Arrays are used to hold several objects of the same type. Vectors are used to represent
multi-bit busses. And Memories are arrays of vectors which are accessed similar to
hardware memories. Read the following examples to determine how to reference and use
the different data structures.
//*** Arrays for integer, time, reg, and vectors of reg ***************
integer i[3:0]; //integer array with a length of 4
time x[20:1]; //time array with length of 19
reg r[7:0]; //scalar reg array with length of 8

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 139
c = r[3]; //the 3rd reg value in array r is assigned to c
//*** Vectors are multi-bit words of type reg or net (wire)************
reg [7:0] MultiBitWord1; // 8-bit reg vector with MSB=7 LSB=0
wire [0:7] MultiBitWord2; // 8-bit wire vector with MSB=0 LSB=7
reg [3:0] bitslice;
reg a; // single bit vector often referred to as a scalar
.... //referencing vectors
a = MultiBitWord1[3]; //applies the 3rd bit of MultiBitWord1 to a
bitslice = MultiBitWord1[3:0]; //applies the 3-0 bits of MultiBitWord1 to bitslice
//*** Memories are arrays of vector reg ********************************
reg [7:0] ram[0:4095]; // 4096 memory cells that are 8 bits wide
//code excerpt from Chapter 2 SRAM model
input [11:0] ABUS; // 12-bit address bus to access all 4096 memory cells
inout [7:0] DATABUS; // 8-bit data bus to wite into and out of a memory cell
reg [7:0] DATABUS_driver;
wire [7:0] DATABUS = DATABUS_driver; //inout must be driven by a wire
....
for (i=0; i < 4095; i = i + 1) // Setting individual memory cells to 0
ram[i] = 0;
end
....
ram[ABUS] = DATABUS; //writing to a memory cell
....
DATABUS_driver = ram[ABUS]; //reading from a memory cell
Operators
Here is a small selection of the Verilog Operators which look similar but have different
effects. Logical Operators evaluate to TRUE or FALSE. Bitwise operators act on each bit
of the operands to produce a multi-bit result. Unary Reduction operators perform the

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 140
operation on all bits of the operand to produce a single bit result.
Operator Name Examples
! logical negation
~ bitwise negation
&& logical and
& bitwise and abus =
bbus&cbus;
& reduction and abit = &bbus;
~& reduction nand
|| logical or
| bitwise or
| reduction or
~| reduction nor
^ bitwise xor
^ reduction xor
~^ ^~ bitwise xnor
~^ ^~ reduction xnor
== logical equality, result may be unknown if x or z in the input if (a == b)
=== logical equality including x and z
!= logical inequality, result may be unknown if x or z in the input
!== logical inequality including x and z
> relational greater than
>> shift right by a number of positions a = shiftvalue
>> 2;
>= relational greater than or equal
< relational less than
<< shift left by a number of positions

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 141
<= relational less than or equal if (a <= b)
<= non blocking assignment statement, schedules assignment for
future and allows next statement to execute #5 b <= b + 2;
= blocking assignment statement, waits until assignment time
before allowing next statement to execute #5 a = a + 2;
Verilog also supports arithmetic, replication, and concatenation operators

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 142
INTERVIEW QUESTIONS

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 143
1. What is VHDL?
2. List out all IEEE standard libraries available in VHDL?
3. What is Gate-level simulation?
4. Why we go for Gate-level simulation?
5. Which is the tool responsible for mapping the net lists to physical devices?
6. How the ―timing verification‖ will be done?
7. List out all strengths of signals in std_logic_1164
8. Is that object of type Real is supported in VHDL?
9. What is a configuration?
10. List out the objects of VHDL?
11. Which are the major data types in VHDL?
12. Which are the two composite types?
13. What is the difference between array and record?
14. What is an alias and write its syntax?
15. What is the use of subtype in VHDL?
16. Write an syntax for subtype?
17. What are signals?
18. When the computed values will get assign to signal?
19. What are the properties of signal?
20. Which is the signal assignment operator?
21. How the signal acts within a process and outside the process?
22. Mention the two delays in VHDL?
23. How will you specify the delay in VHDL?
24. What is inertial delay?
25. What is propagation delay?
26. Which is the default delay in VHDL?
27. What is the main functionality of block statements?
28. How the processes in program executes and how statements within process executes?
29. How much time simulator takes to execute all statements in process?
30. Mention two types of process?
31. Explain variables, constants?
32. List out the differences between signal and variable?
33. List some the sequential statements?
34. List out the different options available for wait statement?
35. Is ―Real‖ data type is synthesizable?
36. How we can include package in our program?
37. What do we need to generate hardware from VHDL model?

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 144
38. How we come to know that the particular model reflects intended behavior?
39. What is the main difference between software language and HDL?
40. How will you test the design?
41. How will you justify that it is strongly typed language?List out the levels of abstractions in
VHDL?
43. Which type of assignment statements will be used in data flow level and behavioral level?
44. What is the difference between sequential circuit and combinational circuit?
45. Why is configuration used?
46. What is generate? What the types are of generate?
47. What is access type?
48. What is generic?
49. While accessing an array, can we give the array index as a variable?
50. What is record?
51. What is the difference between a latch and flip flop?
52. Define setup time and hold time?
53. What is metastability?
54. How can we overcome metastability?
55. What are attributes?
56. What is a test bench?
57. What is the difference between inout and buffer ports?
58. What is signal array?
59. How the signal array is declared?
60. How multi dimensional array is declared?
61. Will synthesizer accept multi dimensional array? if not how we can declare that?
62. List out the four modes for port in VHDL?
63. Which is the concatenation operator?
64. What is combinational process?
65. What are constants?
66. What is assertion?
67. What is the syntax of assertion?
68. Which are the severity levels in assertion?
69. Which is the default severity level?
70. Is that assert is sequential statement or concurrent statement?
71. Find the value of A, B, C in the following circuit ,after 3 clock cycles.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 145
72. If A=10 and B=20, without using temporary register how can you interchange the two things
73. What is the expression for output 'y' in the following circuit?
74. What is the difference between Moore and Mealy state machines?
75. Differences between Signals and Variables in VHDL?
76. Write a verilog code to swap contents of two registers with and without a temporary register?
77. Difference between blocking and non-blocking ststement.
78. Tell me how blocking and non blocking statements get executed?
79. Difference between task and function?
80. Difference between inter statement and intra statement delay?
81. Difference between $monitor,$display & $strobe?
82. What is difference between Verilog full case and parallel case?
83. What is meant by inferring latches, how to avoid it?
84. Variable and signal which will be Updated first?
85. What is sensitivity list?
86. In a pure combinational circuit is it necessary to mention all the inputs in sensitivity disk? if
yes, why?
87. Can you tell me some of system tasks and their purpose?
88. Can you list out some of enhancements in Verilog 2001?
89. Write a Verilog code for synchronous and asynchronous reset?
90. What is pli?why is it used?
91. How to write FSM is verilog?
92. What is difference between freeze deposit and force?

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 146
93. Will case infer priority register if yes how give an example?
94. Case X, Case Z differentiate which is preferable, why?
95. What is the difference between the following two lines of Verilog code?
#5 a = b;
a = #5 b;
96. What is the difference between:
c = foo ? a : b;
andif (foo) c = a;
else c = b;
97. What does `timescale 1 ns/ 1 ps signify in a verilog code?
98. What is the difference between === and == ?
99. What is the difference between wire and reg?
100. Why is it that "if (2'b01 & 2'b10)..." doesn't run the true case?
101. What are Different types of Verilog Simulators ?
102. What happens if there is connecting wires width mismatch?
103. What is the difference between transport delay and inertial delay?
104. What is the difference between ( = = , ! = ) and ( = = = , ! = = )?

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 147
ANSWER
1. VHDL stands for VHSIC Hardware description language. Where VHSIC stands for Very
High Speed Integrated Circuit.
2. std_logic_1164., numeric_std., numeric_bit ., std_logic_arith., std_logic_unsigned
3. Simulating synthesized net list is called Gate-level simulation.
4. The main advantage is that the test bench can be re-used with synthesized circuit that
means we can apply similar test patterns to gate level model to verify that it has response
similar to original model.
5. Implementation tool.
6. This can be done by creating timing model by implementation tool. Where the timing
model consists of gate-level primitives augmented with detailed delay information and can be
used to verify the timing behavior.
7. ‘U‘ --Uninitialized ‘X‘ --Forcing Unknown ‘0‘ --Forcing 0 ‘1‘ --Forcing 1 ‘Z‘ --High
Impedance ‘W‘ --Weak Unknown ‘L‘ -- Weak 0 ‘H‘ -- Weak 1 ‘-‘ -- don‘t care
8. No, because floating point numbers cannot be mapped to hardware.
9. It is that block of code which will bind the particular architecture body to its entity and a
component with an entity.
10. Signal, Variable, Constant.
11. Scalar Types and Composite Types
12. Array and Record
13. Array contains many elements of the same type. But Record contains many elements of
different types.
14. Alias is an alternative name assigned to part of an object. alias alias_name : subtype is
name;
15. Subtype is mainly used for range checking and for imposing additional constraints on
types.
16. subtype name is base type range constraint;
17. Signals are like wires which connect design entities together and communicate changes
in values within a design.
18. After delta delay
19. Type and Type attributes, value, time.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 148
20. ― < = ―
21. Signal assignment is concurrent outside the process and sequential within a process.
22. Inertial delay and Transport delay
23. Using after clause.
24. This is the delay often found in switching circuits where spikes will not propagate
further in circuit.
25. Transport delay models the behaviour of a wire, in which all pulses are propagated
irrespective there width
26. Delta delay.
27. Block statements don't have special functionality as such it separates part of the code
without adding any functionality.
28. Processes will be executed concurrently but statements within process will be executed
sequentially.
29. Zero simulation time.
30. Combinational and Clocked processes.
31. Variables are key words used to declare and can be used inside a process or
subprograms. Variable assignment occurs immediately. Variable retain their variables
throughout the entire simulation. Require less memory Constant is identifiers with a fixed
value. They should not be assigned any values by the simulation process.
32. Signals Connects design entities together. Signals can be declared both inside and
outside of the process. It has three properties like type & type attributes, Value, Time. Signals
assign its value after delta delay. Signals require more memory.
Variables are the identifiers within process or subprograms. This can only be declared within
process can't be used outside a process. It has only two properties like Type, Value. Variable
assigned its value immediately. Variable require less memory.
33. If, else, else, case, loops, wait statement.
34. wait on signal, wait until boolean_expr, wait for time_expr
35. Real is not synthesizable.
36. library work;
use work.pkg_name.all;
Add these lines in code just after the standard library declaration.
37. We need following tools
1. Simulation tool. 2. Synthesis tool. 3. Implementation tool.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 149
38. We use a tool called simulator to simulate the model to verify that the description is
working as intended.
39. Concurrency.
40. By sending different input to design by test bench.
41. VHDL allows LHS & RHS operators of same type.
42. Different types in LHS & RHS is illegal in VHDL
43. Data flow level, Structural Level, Behavioural Level
44. Concurrent statements will be used in data flow level and Sequential statements will be
used in behavioural level.
45. To select one of the many architecture bodies that an entity may have.
46. Concurrent statements can be conditionally selected or replicated during the elaboration
phase. This is called generate .there are two forms of generate. -for generate -if generate
47. These provide access to object that contains a sequence of values of a given type. Values
belonging to access type are pointers to a dynamically allocated object of some other type.
48. Generics are used to pass certain type of information into o design description from its
environment.
49. Yes, we can. But the range of variable should be limited such that it doesn‘t access
outside the array limits.
50. It is a collection of values that may belong to different types.
51. Latches are level sensitive and flip flops are edge sensitive. Latch allows time borrowing
whereas flip-flop does not allow time borrowing. Latches hold the last logic at output if we
put it off. Flip-flops transfer data only at that instant of time and can be changed until next
signal change.
52. Setup time is the time required for the synchronous inputs of a flip-flop to be stable
before a clock pulse is applied. Hold time is the time that the synchronous inputs of a flip-
flop remain stable after the active clock transaction is finished.
53. Metastability is an unknown state. It is neither 0 or nor 1. If the setup time and hold time
are violated, the flip-flop goes into metastability state.
54. Using proper synchronizers. 2. Using faster flip-flops.
55. An attribute is a value, function, range, signal, type or constant that can be associated
with certain names within VHDL description. These names could be among others, entity
name, architecture name.
56. It is a code that generates the stimuli to test out design correctness. It automatically
verifies the code accuracy. It also verifies whether the code meets the circuit requirements.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 150
57. A buffer is an OUT port with read capability. A buffer port may have at most one driver
within the architecture whereas inout port is just bidirectional port.
58. A set of signals may also be declared as a signal array which is a concatenated set of
signals.
59. < type> (< range>)
60. type array_name is array (index_range, index_range) of element_type; .
61. No we can declare the multi dimentional array as two uni dimentional array as shown in
below example type byte is array (7 downto 0 ) of std_logic; type mem is array (3 downto 0)
of byte;
62. in,out,inout,buffer.
63. ―&‖
64. Process having all inputs in sensitivity list..
65. Are identifiers with a fixed value.
66. it is the statement used to report an error when a condition i false.
67. assert < condition> report < message> severity< level>
68. Warning , Error , Failure.
69. Error.
70. Both
71. This is a simple Ring counter. An n-bit ring counter has n states. The 3-bit counter
shown above has 3 states and they are : 100 , 010 , and 001, 100 and so on. So after 3
clock cycles A,B,C = 100.
72. Perform the following operations sequentially:
A = A xor B;
B = A xor B;
A = A xor B;
Now A=20 and B=10.
73. Ans : (In the notation I have used,A' means not(A), and AB means (A and B).
y = ( A'B'C + AB'C' + A'BC + ABC' )
= ( A'C (B+B') + AC' (B+B') )
= A'C + AC'
= A xor C.
74. Moore and Mealy state machines are two ways of designing a state machine. Moore state
machines are controlled in such a way that the outputs are a function of the previous state and

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 151
the inputs. However, Mealy state machines are controlled in a way such that the Outputs may
change with a change of state OR with a change of inputs. A Moore state machine may
require more states(but less complexity) than a Mealy state machine to accomplish the same
task.
75. Signals update a value after some "delta" time or at the end of the process. But variable
updates a value immediately.
76. With temp reg ;
always @ (posedge clock)begin
temp=b;
b=a;
a=temp;
end
Without temp reg;
always @ (posedge clock)
begin
a <= b;
b <= a;
end
77. The Verilog language has two forms of the procedural assignment statement: blocking
and non-blocking. The two are distinguished by the = and <= assignment operators. The
blocking assignment statement (= operator) acts much like in traditional programming
languages. The whole statement is done before control passes on to the next statement. The
non-blocking (<= operator) evaluates all the right-hand sides for the current time unit and
assigns the left-hand sides at the end of the time unit. For example, the following Verilog
program
78. // testing blocking and non-blocking assignment
module blocking;
reg [0:7] A, B;
initial begin: init1
A = 3;
#1 A = A + 1; // blocking procedural assignment

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 152
B = A + 1;
$display("Blocking: A= %b B= %b", A, B ); A = 3;
#1 A <= A + 1; // non-blocking procedural assignment
B <= A + 1;
#1 $display("Non-blocking: A= %b B= %b", A, B );
end
endmodule
produces the following output:
Blocking: A= 00000100 B= 00000101
Non-blocking: A= 00000100 B= 00000100
79. Function:
A function is unable to enable a task however functions can enable other functions.
A function will carry out its required duty in zero simulation time. ( The program time will
not be incremented during the function routine)
Within a function, no event, delay or timing control statements are permitted
In the invocation of a function there must be at least one argument to be passed.
Functions will only return a single value and cannot use either output or inout statements.
Tasks:
Tasks are capable of enabling a function as well as enabling other versions of a Task
Tasks also run with a zero simulation however they can if required be executed in a non zero
simulation time.
Tasks are allowed to contain any of these statements.
A task is allowed to use zero or more arguments which are of type output, input or inout.
A Task is unable to return a value but has the facility to pass multiple values via the output
and inout statements .
80. //define register variables
reg a, b, c;
//intra assignment delays
initial

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 153
begin
a = 0; c = 0;
b = #5 a + c; //Take value of a and c at the time=0, evaluate
//a + c and then wait 5 time units to assign value
//to b.
end
//Equivalent method with temporary variables and regular delay control
initial
begin
a = 0; c = 0;
temp_ac = a + c;
#5 b = temp_ac; //Take value of a + c at the current time and
//store it in a temporary variable. Even though a and c
//might change between 0 and 5,
//the value assigned to b at time 5 is unaffected.
end
81. These commands have the same syntax, and display text on the screen during simulation.
They are much less convenient than waveform display tools like cwaves?. $display and
$strobe display once every time they are executed, whereas $monitor displays every time one
of its parameters changes.
The difference between $display and $strobe is that $strobe displays the parameters at the
very end of the current simulation time unit rather than exactly where it is executed. The
format string is like that in C/C++, and may contain format characters. Format characters
include %d (decimal), %h (hexadecimal), %b (binary), %c (character), %s (string) and %t
(time), %m (hierarchy level). %5d, %5b etc. would give exactly 5 spaces for the number
instead of the space needed. Append b, h, o to the task name to change default format to
binary, octal or hexadecimal.
Syntax:
$display (�format_string�, par_1, par_2, ... );
$strobe (�format_string�, par_1, par_2, ... );

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 154
$monitor (�format_string�, par_1, par_2, ... );
82. A "full" case statement is a case statement in which all possible case-expression binary
patterns can be matched to a case item or to a case default. If a case statement does not
include a case default and if it is possible to find a binary case expression that does not match
any of the defined case items, the case statement is not "full."
A "parallel" case statement is a case statement in which it is only possible to match a case
expression to one and only one case item. If it is possible to find a case expression that would
match more than one case item, the matching case items are called "overlapping" case items
and the case statement is not "parallel."
83. To avoid inferring latches make sure that all the cases are mentioned if not default
condition is provided.
84. Signals
85. The sensitivity list indicates that when a change occurs to any one of elements in the list
change, statement inside that begin�end always block will get executed.
86. Yes in a pure combinational circuit is it necessary to mention all the inputs in sensitivity
disk otherwise it will result in pre and post synthesis mismatch.
87. $display, $displayb, $displayh, $displayo, $write, $writeb, $writeh, $writeo.
The most useful of these is $display.This can be used for displaying strings, expression or
values of variables.
Here are some examples of usage.
$display("Hello oni");
--- output: Hello oni
$display($time) // current simulation time.
--- output: 460
counter = 4'b10;
$display(" The count is %b", counter);
--- output: The count is 0010
$reset resets the simulation back to time 0; $stop halts the simulator and puts it in interactive
mode where the
user can enter commands; $finish exits the simulator back to the operating system

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 155
88. In earlier version of Verilog ,we use 'or' to specify more than one element in sensitivity
list . In Verilog 2001, we can use comma as shown in the example below.
// Verilog 2k example for usage of comma
always @ (i1,i2,i3,i4)
Verilog 2001 allows us to use star in sensitive list instead of listing all the variables in RHS
of combo logics . This removes typo mistakes and thus avoids simulation and synthesis
mismatches,
Verilog 2001 allows port direction and data type in the port list of modules as shown in the
example below
module memory (
input r,
input wr,
input [7:0] data_in,
input [3:0] addr,
output [7:0] data_out
);
89. Synchronous reset, synchronous means clock dependent so reset must not be present in
sensitivity disk eg:
always @ (posedge clk )
begin if (reset)
. . . end
Asynchronous means clock independent so reset must be present in sensitivity list.
Eg
Always @(posedge clock or posedge reset)
begin
if (reset)
. . . end
90. Programming Language Interface (PLI) of Verilog HDL is a mechanism to interface
Verilog programs with programs written in C language. It also provides mechanism to access
internal databases of the simulator from the C program.
PLI is used for implementing system calls which would have been hard to do otherwise (or
impossible) using Verilog syntax. Or, in other words, you can take advantage of both the

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 156
paradigms - parallel and hardware related features of Verilog and sequential flow of C - using
PLI.
91. There r mainly 4 ways 2 write fsm code
1) using 1 process where all input decoder, present state, and output decoder r combine in one
process.
2) using 2 process where all comb ckt and sequential ckt separated in different process
3) using 2 process where input decoder and persent state r combine and output decoder
seperated in other process
4) using 3 process where all three, input decoder, present state and output decoder r separated
in 3 process.
92. $deposit(variable, value);
This system task sets a Verilog register or net to the specified value. variable is the
register or net to be changed; value is the new value for the register or net. The value
remains until there is a subsequent driver transaction or another $deposit task for the
same register or net. This system task operates identically to the ModelSim
force -deposit command.
The force command has -freeze, -drive, and -deposit options. When none of these is
specified, then -freeze is assumed for unresolved signals and -drive is assumed for resolved
signals. This is designed to provide compatibility with force files. But if you prefer -freeze
as the default for both resolved and unresolved signals.
93. Yes Case can infer priority register depending on coding style
reg r;
// Priority encoded mux,
always @ (a or b or c or select2)
begin
r = c;
case (select2)
2'b00: r = a;
2'b01: r = b;
endcase
end
94. CASEZ :
Special version of the case statement which uses a Z logic value to represent don't-care bits.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 157
CASEX :
Special version of the case statement which uses Z or X logic values to represent don't-care
bits.
CASEZ should be used for case statements with wildcard dont cares, otherwise use of CASE
is required; CASEX should never be used. This is because: Dont cares are not allowed in the
"case" statement. Therefore casex or casez are required. Casex will automatically match any
x or z with anything in the case statement. Casez will only match zs -- xs require an absolute
match.
95. #5 a = b; Wait five time units before doing the action for "a = b;".
a = #5 b; The value of b is calculated and stored in an internal temp register,After five time
units, assign this stored value to a.
96. The ? merges answers if the condition is "x", so for instance if foo = 1'bx, a = 'b10, and b
= 'b11, you'd get c = 'b1x. On the other hand, if treats Xs or Zs as FALSE, so you'd always
get c = b.
97. 'timescale directive is a compiler directive.It is used to measure simulation time or delay
time. Usage : `timescale / reference_time_unit : Specifies the unit of measurement for times
and delays. time_precision: specifies the precision to which the delays are rounded off.
98. output of "==" can be 1, 0 or X.
output of "===" can only be 0 or 1.
When you are comparing 2 nos using "==" and if one/both the numbers have one or more bits
as "x" then the output would be "X" . But if use "===" outpout would be 0 or 1.
e.g A = 3'b1x0
B = 3'b10x
A == B will give X as output.
A === B will give 0 as output.
"==" is used for comparison of only 1's and 0's .It can't compare Xs. If any bit of the input is
X output will be X
"===" is used for comparison of X also.
99. Net types: (wire,tri)Physical connection between structural elements. Value assigned by
a continuous assignment or a gate output. Register type: (reg, integer, time, real, real time)
represents abstract data storage element. Assigned values only within an always statement or
an initial statement. The main difference between wire and reg is wire cannot hold (store) the
value when there no connection between a and b like a->b, if there is no connection in a and

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 158
b, wire lose value. But reg can hold the value even if there in no connection. Default
values:wire is Z,reg is x.
100. This is a popular coding error. You used the bit wise AND operator (&) where you
meant to use the logical AND operator (&&).
101. There are mainly two types of simulators available.
Event Driven
Cycle Based
102. For example there are two signals rhs[7:0], and lhs[15:0]. If we do rhs = lhs. Then it is
equivalent to rhs = lhs[7:0]. Assignment starts from LSBs of the signals, and ends at the MSB
of smaller width signal.
103. Transport delay is the delay caused by the wires connecting the gates. Wire do delay the
signal they carry, this is due to the wire resistance, capacitance, and inductance. Simply
transport delay is propagation delay on a wire. In verilog transport delay is modeled as
follows:
a <= #10 b; Inertial delay is the time taken by a gate to change its output. It is the gate delay.
In verilog inertial delay is modeled as follows: assign #10 a = b;
104. The equality operators ( = = , ! = ) will yield an x if either operand has x or z in its bits.
Where as the case equality operators ( = = = , ! = = ) compare both operands bit by bit and
compare all bits, including x and z.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 159
CHAPTER 6
COMPUTER
ARCHITECTURE

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 160
FUNCTIONAL UNITS OF A COMPUTER SYSTEM
Digital computer systems consist of three distinct units. These units are as follows: Input unit
Central Processing unit Output unit these units are interconnected by electrical cables to
permit communication between them. This allows the computer to function as a system. Input
Unit A computer must receive both data and program statements to function properly and be
able to solve problems. The method of feeding data and programs to a computer is
accomplished by an input device. Computer input devices read data from a source, such as
magnetic disks, and translate that data into electronic impulses for transfer into the CPU.
Some typical input devices are a keyboard, a mouse,or a scanner. Central Processing Unit
The brain of a computer system is the central processing unit (CPU). The CPU processes data
transferred to it from one of the various input devices. It then transfers either an intermediate
or final result of the CPU to one or more output devices. A central control section and work
areas are required to perform calculations or manipulate data. The CPU is the computing
center of the system. It consists of a control section, an arithmetic-logic section, and an
internal storage section (main memory). Each section within the CPU serves a specific
function and has a particular relationship with the other sections within the CPU.
Some practitioners of computer architecture at companies such as Intel and AMD use more
fine distinctions:
Macroarchitecture - architectural layers that are more abstract than microarchitecture, e.g.
ISA
ISA (Instruction Set Architecture) - as defined above
Assembly ISA - a smart assembler may convert an abstract assembly language common to a
group of machines into slightly different machine language for different
implementations - higher level language tools such as
compilers may define a consistent interface or contract to programmers using them,
abstracting differences between underlying ISA, UISA, and microarchitectures. E.g. the C,
C++, or Java standards define different Programmer Visible Macroarchitecture - although in
practice the C microarchitecture for a particular computer includes
tecture) - a family of machines with different
hardware level microarchitectures may share a common microcode architecture, and hence a

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 161
UISA. - the set of functions that a microprocessor is expected to provide,
from the point of view of a hardware platform. E.g. the x86 A20M, FERR/IGNNE or FLUSH
pins, and the messages that the processor is expected to emit after completing a cache
invalidation so that external caches can be invalidated. Pin architecture functions are more
flexible than ISA functions - external hardware can adapt to changing encodings, or changing
from a pin to a message - but the functions are expected to be provided in successive
implementations even if the manner of encoding them changes.
Design goals
The exact form of a computer system depends on the constraints and goals for which it was
optimized. Computer architectures usually trade off standards, cost, memory capacity, latency
and throughput. Sometimes other considerations, such as features, size,w eight, reliability,
expandability and power consumption are factors as well. The most common scheme
carefully chooses the bottleneck that most reduces the computer's speed. Ideally, the cost is
allocated proportionally to assure that the data rate is nearly the same for all parts of the
computer, with the most costly part being the slowest. This is how skillful commercial
integrators optimize personal computers.
Central processing unit (CPU) —
The part of the computer that executes program instructions is known as the processor or
central processing unit (CPU). In a microcomputer, the CPU is on a single electronic
component, the microprocessor chip, within the system unit or system cabinet. The system
unit also includes circuit boards, memory chips, ports and other components. A
microcomputer system cabinet will also house disk drives, hard disks, etc., but these are
considered separate from the CPU. This is principal part of any digital computer
system,generally composed of control unit, and arithmetic-logic unit the ‗heart‖ of the
computer.It constitutes the physical heart of the entire computer system; to it is linked various
peripheral equipment, including input/output devices and auxiliary storage units.
Control Unit is the part of a CPU or other device that directs its operation. The control unit
tells the rest of the computer system how to carry out a program‘s instructions. It directs the
movement of electronic signals between memory—which temporarily holds data, instructions
and processed information—and the ALU. It also directs these control signals between the

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 162
CPU and input/output devices. The control unit is the circuitry that controls the flow of
information through the processor, and coordinates the activities of the other units within it.
In a way, it is the "brain", as it controls what happens inside the processor, which in turn
controls the rest of the PC.
Arithmetic-Logic Unit usually called the ALU is a digital circuit that performs two types of
operations— arithmetic and logical. Arithmetic operations are the fundamental mathematical
operations consisting of addition, subtraction, multiplication and division. Logical operations
consist of comparisons. That is, two pieces of data are compared to see whether one is equal
to, less than, or greater than the other. The ALU is a fundamental building block of the
central processing unit of a computer. Memory — Memory enables a computer to store, at
programs. Memory—also known as the primary storage or main
memory—is a part of the microcomputer that holds data for processing, instructions for
processing the data (the program) and information (processed data). Part of the contents of
the memory is held only temporarily, that is, it is stored only as long as the microcomputer is
turned on. When you turn the machine off, the contents are lost. The capacity of the memory
to hold data and program instructions varies in different computers. The original IBM PC
could hold approximately 6,40,000 characters of data or instructions only. But modern
microcomputers can hold millions, even billions of characters in their memory.
Input device :
An input device is usually a keyboard or mouse, the input device is the conduit through
which data and instructions enter a computer. A personal computer would be useless if you
could not interact with it because the machine could not receive instructions or deliver the
results of its work. Input devices accept data and instructions from the user or from another
computer system (such as a computer on the Internet). Output devices return processed data
to the user or to another computer system. The most common input device is the keyboard,
which accepts letters, numbers, and commands from the user. Another important type of
input device is the mouse, which lets you select options from on-screen menus. You use a
mouse by moving it across a flat surface and pressing its buttons. A variety of other input
devices work with personal computers, too: The trackball and touchpad are variations of the
mouse and enable you to draw or point on the screen. The joystick is a swiveling lever
mounted on a stationary base that is well suited for
playing video games.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 163
Basic Operational Concepts of a Computer
• Most computer operations are executed in the ALU (arithmetic and logic unit) of a
processor.
• Example: to add two numbers that are both located in memory.
– Each number is brought into the processor, and the actual addition is carried out by the
ALU.
– The sum then may be stored in memory or retained in the processor for immediate use.
Registers
• When operands are brought into the processor, they are stored in high-speed storage
elements (registers).
• A register can store one piece of data (8-bit registers, 16-bit registers, 32-bit registers, 64-bit
registers, etc…)
• Access times to registers are faster than access times to the fastest cache unit in the memory
hierarchy.
How are instructions sent between memory and the processor
• The program counter (PC) or instruction pointer (IP) contains the memory address of the
next instruction to be fetched and executed.
• Send the address of the memory location to be accessed to the memory unit and issue the
appropriate control signals (memory read).
• The instruction register (IR) holds the instruction that is currently being executed.
• Timing is crucial and is handled by the control unit within the processor.
Single BUS STRUCTURES :
Bus structure and multiple bus structures are types of bus or computing. A bus is basically a
subsystem which transfers data between the components of a Computer components either
within a computer or between two computers. It connects peripheral devices at the same time.
- A multiple Bus Structure has multiple inter connected service integration buses and for each
bus the other buses are its foreign buses. A Single bus structure is very simple and consists of
a single server. - A bus can not span multiple cells. And each cell can have more than one
buses. Published messages are printed on it. There is no messaging engine on Single bus
structure I)In single bus structure all units are connected in the same bus than connecting

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 164
different buses as multiple bus structure. Ii)multiple bus structure's performance is better than
single bus structure.
Iii)single bus structure's cost is cheap than multiple bus structure.
Computer software, or just software is a general term used to describe the role that
computer programs, procedures and documentation play in a computer system. The term
includes:
users.
memory
devices on board mainboards or other types of integrated hardware carriers. dleware,
which controls and co-ordinates distributed systems.
systems, which interface with hardware to provide the necessary services for application
software. rogramming.
Software testing consists of various methods to test and declare a software product fit before
it can be launched for use by either an individual or a group. ware, which is an umbrella
term or container term for all utilities and application software that serve in combination for
testing a software package but not necessarily may optionally contribute to operational
purposes. As such, testware is not a standing configuration but merely a working
environment for application software or subsets thereof.
Software Characteristics
-out".
Assembler
Typically a modern assembler creates object code by translating assembly instruction
mnemonics into opcodes, and by resolving symbolic names for memory locations and other
entities. The use of symbolic references is a key feature of assemblers, saving tedious
calculations and manual address updates after program modifications. Most assemblers also
include macro facilities for performing textual substitution—e.g., to generate common short
sequences of instructions to run inline, instead of in a subroutine.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 165
Assembly language
A program written in assembly language consists of a series of instructions—mnemonics that
correspond to a stream of executable instructions, when translated by an assembler, that can
be loaded into memory and executed.
Basic elements
Any Assembly language consists of 3 types of instruction statements which are used to
define the program operations:
Types of Addressing Modes
Each instruction of a computer specifies an operation on certain data. The are various ways of
specifying address of the data to be operated on. These different ways of specifying data are
called the addressing modes. The most common addressing modes are:
splacement addressing mode
To specify the addressing mode of an instruction several methods are used. Most often used
are:
a) Different operands will use different addressing modes.
b) One or more bits in the instruction format can be used as mode field. The value of the
mode field determines which addressing mode is to be used.
The effective address will be either main memory address of a register.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 166
The Instruction Set Architecture
•superscalar processor --can execute more than one instructions per cycle.
•cycle--smallest unit of time in a processor.
•parallelism--the ability to do more than one thingat once.
•pipelining--overlapping parts of a large task to increase throughput without
decreasing latency.
Instruction Length
•Variable-length instructions (Intel 80x86, VAX) require multi-step fetch
and decode, but allow for a much more flexible and compact instruction set.
•Fixed-length instructions allow easy fetch and decode, and simplify
pipelining and parallelism.
All MIPS instructions are 32 bits long.
–this decision impacts every other ISA decision we make because it makes
instruction bits scarce.
Four principles of IS architecture
–simplicity favors regularity
–smaller is faster
–good design demands compromise
–make the common case fast
Instruction Set Architecture (ISA)
The Instruction Set Architecture (ISA) is the part of the processor that is visible to the
programmer or compiler writer. The ISA serves as the boundary between software and
hardware. We will briefly describe the instruction sets found in many of the microprocessors
used today. The ISA of a processor can be described using 5 catagories:
Operand Storage in the CPU
Where are the operands kept other than in memory?
Number of explicit named operands
How many operands are named in a typical instruction.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 167
Operand location
Can any ALU instruction operand be located in memory? Or must all operands be
kept internaly in the CPU?
Operations
What operations are provided in the ISA.
Type and size of operands
What is the type and size of each operand and how is it specified?
Of all the above the most distinguishing factor is the first.
The 3 most common types of ISAs are:
1. Stack - The operands are implicitly on top of the stack.
2. Accumulator - One operand is implicitly the accumulator.
3. General Purpose Register (GPR).
Reduced Instruction Set Computer (RISC)
As we mentioned before most modern CPUs are of the GPR (General Purpose Register) type.
A few examples of such CPUs are the IBM 360, DEC VAX, Intel 80x86 and Motorola
68xxx. But while these CPUS were clearly better than previous stack and
accumulator based CPUs they were still lacking in several areas:
1. Instructions were of varying length from 1 byte to 6-8 bytes. This causes problems with the
pre-fetching and pipelining of instructions.
2. ALU (Arithmetic Logical Unit) instructions could have operands that were memory
locations. Because the number of cycles it takes to access memory varies so does the whole
instruction. This isn't good for compiler writers, pipelining and multiple issue.
3. Most ALU instruction had only 2 operands where one of the operands is also the
destination. This means this operand is destroyed during the operation or it must be saved
before somewhere.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 168
OBJECTIVE TYPE
QUESTION

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 169
Q.1 In a virtual memory system, the addresses used by the programmer belongs to
(A) memory space. (B) physical addresses.
(C) address space. (D) main memory address.
Q.2 The method for updating the main memory as soon as a word is removed from the
Cache is called
(A) Write-through (B) write-back
(C) protected write (D) cache-write
Q.3 A control character is sent at the beginning as well as at the end of each block in
thesynchronous-transmission in order to
(A) Synchronize the clock of transmitter and receiver.
(B) Supply information needed to separate the incoming bits into individual
character.
(C) Detect the error in transmission and received system.
(D) Both (A) and (C).
Q.4 In a non-vectored interrupt, the address of interrupt service routine is
(A) Obtained from interrupt address table.
(B) Supplied by the interrupting I/O device.
(C) Obtained through Vector address generator device.
(D) Assigned to a fixed memory location.
Q.5 Divide overflow is generated when
(A) Sign of the dividend is different from that of divisor.
(B) Sign of the dividend is same as that of divisor.
(C) The first part of the dividend is smaller than the divisor.
(D) The first part of the dividend is greater than the divisor.
Q.6 Which method is used for resolving data dependency conflict by the compiler
itself?
(A) Delayed load. (B) operand forwarding.
(C) Pre fetch target instruction. (D) loop buffer.
Q.7 Stack overflow causes
(A) Hardware interrupt.
(B) External interrupt.
(C) Internal interrupt.
(D) Software interrupt.
Q.8 Arithmetic shift left operation
(A) Produces the same result as obtained with logical shift left operation.
(B) Causes the sign bit to remain always unchanged.
(C) Needs additional hardware to preserve the sign bit.
(D) Is not applicable for signed 2's complement representation.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 170
Q.9 Zero address instruction format is used for
(A) RISC architecture.
(B) CISC architecture.
(C) Von-Neuman architecture.
(D) Stack-organized architecture.
Q.10 Address symbol table is generated by the
(A) memory management software.
(B) assembler.
(C) match logic of associative memory.
(D) generated by operating system
Q.11 The ASCII code for letter A is
(A) 1100011 (B) 1000001
(C) 1111111 (D) 0010011
Q.12 The simplified expression of (A+B) + C is
(A) (A + B)C (B) A(B + C)
(C) (C+A + B) (D) None of these
Q.13 The negative numbers in the binary system can be represented by
(A) Sign magnitude (B) I's complement
(C) 2's complement (D) All of the above
Q.14 ABCD - seven segment decoder / driver in connected to an LED display.
Which segments are illuminated for the input code DCBA = 0001.
(A)b, c (B) c, b
(C)a, b, c (D) a, b, c, d
Q.15 How many flip-flops are required to produce a divide-by-32 device?
(A)4 (B) 6
(C)5 (D) 7
Q.16 The content of a 4-bit register is initially 1101. The register is shifted 2 times to the
right with the serial input being 1011101.
What is the content of the register after each shift?
(A)1110, 0111 (B) 0001, 1000
(C)1101, 1011 (D) 1001, 1001
Q.17 How many different addresses are required by the memory that contain 16K
words?
(A)16,380 (B) 16,382
(C)16,384 (D) 16,386
Q.18 What is the bit storage capacity of a ROM with a 512' 4-organization?
(A) 2049 (B) 2048
(C) 2047 (D) 2046

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 171
Q.19 DMA interface unit eliminates the need to use CPU registers to transfer data
from
(A) MAR to MBR (B) MBR to MAR
(C) I/O units to memory (D) Memory to I/O units
Q.20 How many 128 x 8 RAM chips are needed to provide a memory capacity of
2048 bytes?
(A) 8 (B) 16
(C) 24 (D) 32
Q.21 Which of the following is a self complementing code?
(A) 8421 code (B) 5211
(C) Gray code (D) Binary code
Q.22 Which gate can be used as anti-coincidence detector?
(A) X-NOR (B) NAND
(C) X-OR (D) NOR
Q.23 Which of the following technology can give high speed RAM?
(A) TTL (B) CMOS
(C) ECL (D) NMOS
Q.24 In 8085 microprocessor how many I/O devices can be interfaced in I/O mapped
I/O technique?
(A) Either 256 input devices or 256 output devices.
(B) 256 I/O devices.
(C) 256 input devices & 256 output devices.
(D) 512 input-output devices.
Q.25 After reset, CPU begins execution of instruction from memory address
(A) 0101H (B) 8000H
(C) 0000H (D) FFFFH
Q.26 Which is true for a typical RISC architecture?
(A) Micro programmed control unit.
(B) Instruction takes multiple clock cycles.
(C) Have few registers in CPU. (D) Emphasis on optimizing instruction pipelines.
Q.27 When an instruction is read from the memory, it is called
(A) Memory Read cycle (B) Fetch cycle
(C) Instruction cycle (D) Memory write cycle
Q.28 Which activity does not take place during execution cycle?
(A) ALU performs the arithmetic & logical operation.
(B) Effective address is calculated.
(C) Next instruction is fetched.
(D) Branch address is calculated & Branching conditions are
checked.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 172
Q.29 A circuit in which connections to both AND and OR arrays can be
programmed is called
(A) RAM (B) ROM
(C) PAL (D) PLA
Q.30 If a register containing data (11001100)2 is subjected to arithmetic shift left
operation, then the content of the register after 'ashl' shall be
(A) (11001100)2 (B) (1101100)2
(C) (10011001)2 (D) (10011000)2
Q.31 Which logic is known as universal logic?
(A) PAL logic. (B) NAND logic.
(C) MUX logic. (D) Decoder logic.
Q.32 The time for which the D-input of a D-FF must not change after the clock is
applied is known as
(A) Hold time. (B) Set-up time.
(C) Transition time. (D) Delay-time.
Q.33 How many memory chips of (128 x 8) are needed to provide a memory
capacity of 4096 x 16?
(A)64 (B) A B
(C)32 (D) None
Q.34 In addition of two signed numbers, represented in 2' s complement form
generates an overflow if
(A) A. B = 0 (B) A = 0
(C) 1 B A = Å (D) A + B = 1
Q.35 Addition of (1111)2 to a 4 bit binary number 'a' results
(A) Incrementing A (B) Addition of (F)H
(C) No change (D) Decrementing A
Q.36 In a microprocessor system, suppose. TRAP, HOLD, RESET Pin
got activated at the same time, while the processor was executing some
instructions, then it will first respond to
(A) TRAP (B) HOLD
(C) RESET (D) None
Q.37 Pseudo instructions are
(A) Machine instructions (B) Logical instructions
(C) Micro instructions (D) instructions to assembler.
Q.38 An attempt to access a location not owned by a Program is called
(A) Bus conflict (B) Address fault
(C) Page fault (D) Operating system fault

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 173
Q. 39 Dynamic RAM consumes ________ Power and ________ then the Static RAM.
(A) more, faster (B) more, slower
(C) less, slower (D) less, faster
Q.40 The flag register content after execution of following program by 8085
microprocessor shall be
Program
SUB A
MVI B, (01)H
DCR B
HLT
(A) (54)H (B) (44)H
(C) (45)H (D) (55)H
Q.41 Which flag of the 8085's flag register is not accessible to programmer
directly?
(A)Zero flag
(B)Carry flag
(C)Auxiliary carry flag
(D)Parity flag
Q.42 Cache memory works on the principle of
(A) Locality of data.
(B) Locality of reference
(C) Locality of memory
(D) Locality of reference & memory
Q.43 Which of the following is a Pseudo instruction?
(A) SPHL (B) LXI
(C) NOP (D) END
Q.44 A demultiplexer can be used as
(A)Encoder (B)Decoder
(C)Multiplexer (D)None of the above
Q.45 Excess-3 equivalent representation of (1234)H is
(A) (1237)Ex-3 (B) (4567)Ex-3
(C) (7993)Ex-3 (D) (4663)Ex-3
Q.46 Which of the memory holds the information when the Power Supply is switched
off?
(A) Static RAM (B) Dynamic RAM
(C) EEROM (D) None of the above
Q.47 Minimum no. of NAND gate required to implement a Ex-OR function is
(A)2 (B)3
(C)4 (D)5

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 174
Q.48 Which of the following interrupt is maskable?
(A)INTR (B)RST 7.5
(C)TRAP (D)Both (A) and (B)
Q.49 Which of the following expression is not equivalent to x?
(A) x NAND x (B) x NOR x
(C) x NAND 1 (D) x NOR 1
Q.50 Word 20 contains 40 Word 30 contains 50 Word 40 contains 60 Word 50 contains
70 Which of the following instructions does not, load 60 into the Accumulator
(A) Load immediate 60
(B) Load direct 30
(C) Load indirect 20
(D) both (A) & (C)
Q.51 An interrupt for which hardware automatically transfers the program to a specific
memory location is known as
(A) Software interrupt
(B) Hardware interrupt
(C) Maskable interrupt
(D) Vector interrupt
Q.52 Synchronous means _______
(A) At irregular intervals
(B) At same time
(C) At variable time
(D) None of these
Q.53 'n' Flip flops will divide the clock frequency by a factor of
(A)n2 (B) n
(C)2n (D) log (n)
Q.54 In DMA the data transfer is controlled by
(A)Microprocessor (B) RAM
(C)Memory (D) I/O devices
Q.55 The number of instructions needed to add a numbers an store the result in
memory using only one address instruction is
(A)n (B) n - 1
(C)n +1 (D) Independent of n
Q.56 Negative numbers cannot be represented in
(A)Signed magnitude form
(B)I's complement form
(C)2's complement form
(D)8-4-2-1 code
Q.57 Which of the following architecture is/are not suitable for realizing SIMD
(A)Vector Processor (B) Array Processor

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 175
(C)Von Neumann (D) All of the above
Q.58 In Boolean expression A+BC equals
(A)(A+B)(A+C) (B) (A'+B)(A'+C)
(C)(A+B)(A'+C) (D) (A+B)C
Q.59 A JK flip-flop can be implemented using D flip-flop connected such that
(A)D=JQ+KQ (B) D=JQ+KQ
(C)D=JQ+KQ (D) D=JQ+KQ
Q.60 An effective solution to the power consumption problem lies in using _______
transistors to implement ICs.
(A) NMOS (B) TTL shottky
(C) PMOS (D) both NMOS & PMOS
Q.61 Memory interleaving technique is used to address the memory modules in order to
have
(A) higher average utilization
(B) faster access to a block of data
(C) reduced complexity in mapping hardware
(D) both (A) & (B)
Q.62 In a multiprogramming system, which of the following is used
(A) Data parallelism (B) Paging concept
(C) L1 cache (D) None of the above
Q.63 Cycle stealing technique is used in
(A) Interrupt based data transfer
(B) Polled mode data transfer
(C) DMA based data transfer
(D) None of these
Q.64 Manipulation of individual bits of a word is often referred to as
(A) Bit twidding (B) Bit swapping
(C) Micro-operation (D) None of these
Ans. (A)
Q.65 Which of the following is not a characteristic of a RISC architecture.
(A) Large instruction set (B) One instruction per cycle
(C) Simple addressing modes (D) Register-to-register operation
Q.66 When CPU is not fully loaded, which of the following method of data transfer is
preferred
(A) DMA (B) Interrupt
(C) Polling (D) None of these
Q.67 Associative memory is some times called as
(A) Virtual memory (B) Cache memory
(C) Main memory (D) Content addressable memory
Q.68 BCD equivalent of Two's complement is
(A) nine's complement (B) ten's complement

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 176
(C) one's complement+1 (D) none of these
Q.69 PAL circuit consists of
(A) Fixed OR & programmable AND logic
(B) Programmable OR & Fixed AND Logic
(C) Fixed OR & fixed AND logic
(D) Programmable OR & programmable AND logic
Q.70 8085 microprocessor carryout the subtraction by
(A) BCD subtraction method
(B) Hexadecimal subtraction method
(C) 2‘s complement method
(D) Floating Point subtraction method
Q.71 CPU checks for an interrupt signal during
(A) Starting of last Machine cycle
(B) Last T-State of instruction cycle
(C) First T-State of interrupt cycle
(D) Fetch cycle
Q.72 During DMA acknowledgement cycle, CPU relinquishes
(A) Address bus only (B) Address bus & control bus
(C) Control bus & data bus (D) Data bus & address bus
Q.73 If the clock input applied to a cascaded Mod-6 & Mod-4 counter is 48KHz. Than
the output of the cascaded arrangement shall be of
(A) 4.8 KHz (B) 12 KHz
(C) 2 KHz (D) 8 KHz
Q.74 If the stack pointer is initialised with (4FEB)H, then after execution of Push
operation in 8085 microprocessor, the Stack Pointer shall be
(A) 4FEA (B) 4FEC
(C) 4FE9 (D) 4FED
Q.75 A more efficient way to organise a Page Table is by means of an associative
memory having
(A) Number of words equal to number of pages
(B) Number of words more than the number of pages
(C) Number of words less than the number of pages
(D) Any of the above
Q.76 If there are four ROM ICs of 8K and two RAM ICs of 4K words, than the address
range of Ist RAM is (Assume initial addresses correspond to ROMs)
(A) (8000)H to (9FFF)H (B) (6000)H to (7FFF)H
(C) (8000)H to (8FFF)H (D) (9000)H to (9FFF)H
Q.77 C B A Å Å is equal to A B C for
(A) A=0, B=1, C=0 (B) A=1, B=0, C=1
(C) A=1, B=1, C=1 (D) All of the above

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 177
Q.78 Gray code equivalent of (1000)2 is
(A) (1111)G (B) (1100)G
(C) (1000)G (D) None of these

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 178
ANSWER
1 2 3 4 5 6 7 8 9 10
C B B D B A C A D B
11 12 13 14 15 16 17 18 19 20
B A C A C A C B D B
21 22 23 24 25 26 27 28 29 30
A C C C C A B D A D
31 32 33 34 35 36 37 38 39 40
B A A C C D A B C A
41 42 43 44 45 46 47 48 49 50
C B D B B C C B D B
51 52 53 54 55 56 57 58 59 60
B B B D D C C A A D
61 62 63 64 65 66 67 68 69 70
C B C A A D D C A C
71 72 73 74 75 76 77 78
B D C D A C D A

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 179
INTERVIEW QUESTIONS

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 180

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 181
1.What is big endian and little endian format?
The name big endian is used when lower byte addresses are used for the more
significiant of the word. The name little endian is used for the less significiant bytes of
the word.
2.What is a branch instruction?
Branch instruction is a type of instruction which loads a new value into the program
counter.
3.What is branch target?
As a result of branch instructions , the processor fetches and executes the instruction
at a new address called branch target, instead of the instruction at the location that
follows the branch instruction in sequential address order.
4.What is a pointer?
The register or memory location that contains the address of an operand is called a
pointer.
5.Define Response time and Throughput.
Response time is the time between the start and the completion of the event. Also
referred to as execution time or latency.Throughput is the total amount of work done
in a given amount of time
6.Define device interface.
The buffer registers DATAIN and DATAOUT and the status flags SIN and SOUT are
part of circuitry commonly known as a device interface.
7.What is byte addressable memory?
The assignment of successive addresses to successive byte locations in the memory is
called byte addressable memory.
8.What is pipelining?
The overlapping of execution of successive instructions is called pipelining.
9.What is multiprogrraming or multitasking?
The operating system manages the concurrent execution of several application
programs to make the best possible uses of computer resources.this pattern of
concurrent execution is called multiprogrraming or multitasking.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 182
10.What is text editor?
It is used for entering and editing application programs. The user of this program
interactively executes command that allow statements of a source program entered at a
keyboard to be accumulated in a file.
11.What is a compiler?
A system software program called a compiler translates the high-level language
program into a suitable machine language program containing instructions such as the
Add and Load instructions.
12.Define Bus?
A group of lines that serves as a connecting path for several devices is called a bus.
13.Define interrupt and ISR?
An interrupt is a request from an I/O device for service by the processor. The
processor provides the requested service by executing the interrupt service routine.
14.What are the steps in executing a program?
1.Fetch
2.Decode
3.Execute
4.Store
15.What are the registers generally contained in the processor?
MAR-Memory Address Register MDR-Memory Data Register
IR-Instruction Register,R0-Rn-General purpose Registers,PC-Program Counter
16.What is cache memory?
The small and fast RAM units are called as caches. When the execution of an
instruction calls for data located in the main memory, the data are fetched and a copy
is placed in the cache. Later if the same data is required it is read directly from the
cache.
17.What is guard bits?

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 183
Guard bits are extra bits which are produced during the intermediate steps to yield
maximum accuracy in the final results.
18.What is the advantage of non restoring over restoring division?
Non restoring division avoids the need for restoring the contents of register after
an successful subtraction.
19.How CSA speeds up multiplication?
It reduces the time needed to add the summands. Instead of letting the carries ripple
along the rows, they can be saved and introduced into the next row, at the correct
waited position.
20.What are the two techniques for speeding up the multiplication operation?
Bit Pair recoding
CSA
21.What are the two attractive features of Booth algorithm
It handles both positive and negative multipliers uniformly
It achieves some efficiency in the number of additions required when
the multiplier has a few large blocks of ones
22.What are the two approaches to reduce delay in adders
Fastest electronic technology in implementing the ripple carry logic design
Augmented logic gate network
23.What is the delay encountered for all the sum bits in n-bit binary
addition/subtraction logic unit?
The gate delays with and without overflow logic are 2n+2 and 2n respectively
Compare vertical organization and horizontal organization.
24.ertical organization Horizontal organization
1. Highly encoded schemes
2. Specify only a small number of control signals.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 184
3. Operating speed is high. Minimally encoded schemes
Many resources can be controlled.
25.Name some register output control signals.
Pcout, MDRout, Zout, Offsetout, R0out, R1out, R2out, R3out, and TEMPout
26.What is control store?
The microroutines for all instructions in the instruction set of a computer are stored in
a special memory called the control store.
27.Define microroutine and microinstruction.
A sequence of control words corresponding to the control sequence of a machine
instruction constitutes the microroutine for that instruction, and the individual control
words in this microroutine are referred to as microinstructions.
28.What is microprogrammed control?
Microprogrammed control is a scheme in which control signals are generated by a
program similar to machine language programs.
29.What is mean by branch instruction.
A branch instruction is an instruction which replaces the contents of the PC with the
branch target address. This address is usually obtained by adding an offset X, which is
given in the branch instruction, to the updated value of the PC. The location following
a branch instruction is called a branch delay slot.
30.What is a deadlock
A deadlock is a situation that can arise when two units, A and B, use a shared
resource. Suppose that unit B cannot complete its task until unit A completes its task.
At the same time, unit B has been assigned a resource that unit A needs. If this
happens, neither unit can complete its task. Unit A is waiting for the resource it needs,
which is being held by unit b. at the same time, unit B is waiting for unit A to finish
before it can release that resource.
31.What are superscalar processors?
Several instructions start execution in the same clock cycle, and the processor
is said to use multiple issue. Such processors are capable of achieving an instruction
execution throughput of more than one instruction per cycle. They are known as
superscalar processors.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 185
32.What is delayed branching?
A technique called delayed branching can minimize the penalty incurred as a
result of conditional branch instructions. The idea is simple. The instructions in the
delay slots are always fetched. Therefore, we would like to arrange for them to be
fully executed whether or not the branch is taken. The objective is to be able to place
useful instructions in these slots. If no useful instructions can be placed in the delay
slots, these slots must be filled with NOP instructions.
33.What is branch folding
The instruction fetch unit has executed the branch instruction concurrently
with the execution of other instructions. This technique is referred to as branch
folding.
34.What is structural hazard?
Structural hazard is the situation when two instructions require the use of a
given hardware resource at the same time. The most common case in which this
hazard may arise is in access to memory.
35.What are called stalls?
An alternative representation of the operation of a pipeline in the case of a
cache miss gives the function performed by each pipeline stage in each clock cycle.
The periods in which the decode unit, execute unit, and the write unit are idle are
called stalls. They are also referred to as bubbles in the pipeline.
36.What are instruction hazards?
The pipeline may also be stalled because of a delay in the availability of an
instruction. For example, this may be a result of a miss in the cache, requiring the
instruction to e fetched from the main memory. Such hazards are often called control
hazards or instruction hazards.
37.What is data hazard?
Any condition that causes the pipeline to stall is called a hazard. A data hazard
is any condition in which either the source or the destination operands of an
instruction are not available at the time expected in the pipeline. As a result some
operation has to be delayed, and the pipeline stalls.
38.What is lockup-free?
A cache that can support multiple outstanding misses is called lockup-free.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 186
39.What is booting?
When the power is turned on the OS has to be loaded into the main
memory which takes place as part of a process called booting.To initiate booting a
tiny part of main memory is implemented as a nonvolatile ROM.
40.What is page frame?
An area in the main memory that can hold one page is called as page frame.
41. What is virtual memory?
Techniques that automatically move program and datablocks into the physical
main memory when they are required for execution are called as virtual memory.
42.What is virtual address?
The binary address that the processor used for either instruction or data called
as virtual address.
43.What is write miss?
During the write operation if the addressed word is not in cache then said to be
write miss.
44.Define miss rate?
It is the number of misses stated as a fraction of attempted accesses.
45. Define miss penalty?
The extra time needed to bring the desired information into the cache.
46. Define hit rate?
The number of hits stated as a fraction of all attempted access .
47. What is write-back or copy back protocol?
For a write operation using this protocol during write hit: the technique is to
update only the cache location and to mark it as updated with an associated flag bit,
often called the dirty or modified bit. The main memory location of the word is
updated later, when the block containing this marked word is to be removed from the
cache to make room for a new block. For a write miss: the block containing the
addressed word is first brought into the cache, and then the desired word in the cache
is overwritten with the new information.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 187
48. Define cache line.
Cache block is used to refer to a set of contiguous address locations of some
size. Cache block is also referred to as cache line.
49. Define flash memory?
It is an approach similar to EEPROM technology. A flash cell is based on a
single transistor controlled by trapped charge just like an EEPROM cell.
50. What is cache memory?
It is a small, fast memory that is inserted between the larger, slower main
memory and the processor. It reduces the memory access time.
51. What are RIMMs?
RDRAM chips can be assembled in to larger modules called RIMMs. It can
hold upto 16 RDRAMs.
52. Differentiate static RAM and dynamic RAM?
Static RAM Dynamic RAM
They are fast They are slow
They are very expensive They are less expensive
They retain their state indefinitely They do not retain their state indefinitely
They require several transistors They require less no transistors.
Low density High density
53. What are SIMMs and DIMMs?
SIMMs are Single In-line Memory Modules. DIMMs are Dual In-line Memory
Modules. Such modules are an assembly of several memory chips on a separate small
board that plugs vertically into a single socket on the motherboard.
54. Define Memory Latency?
It is used to refer to the amount of time it takes to transfer a word of data to or
from the memory.
55. What is a word line?
In a memory cell, all the cells of a row are connected to a common line called
as word line.

DEPARTMENT OF ECE
PLACEMENT HAND-BOOK 2012 – 2013 Page 188
56. What is MMU?
MMU is the Memory Management Unit. It is a special memory control circuit
used for implementing the mapping of the virtual address space onto the physical
memory.
57. What is meant by handshake?
Handshake is used between the master and the slave for controlling data
transfers on the bus.
58. What is known as cycle stealing?
The processor originates most memory access cycles, the DMA controller can
be said to ―steal‖ memory cycles from the processor. Hence ,this interweaving
technique is usually called cycle stealing.
59. What is known as multitasking?
Multitasking is a mode of operation in which a processor executes several user
programs at the same time.
60. What is known as a debugger?
System software usually includes a program called a debugger, which helps
the programmer find errors in a program.