Embed Size (px)
Citation preview
Physics 351 — Monday, February 2, 2015
I HW #3 due Friday.
I You read Chapter 6 (calculus of variations) for today.
I Remember quiz Weds: basically one HW1 problem, ∼ 15 min.
I On HW3 XC1, I should add, “Use substitutionsin(φ/2) = Au, where A = sin(Φ/2).”
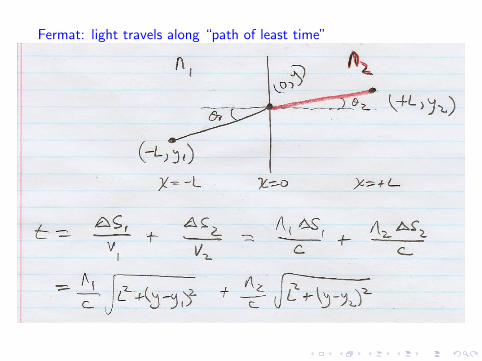
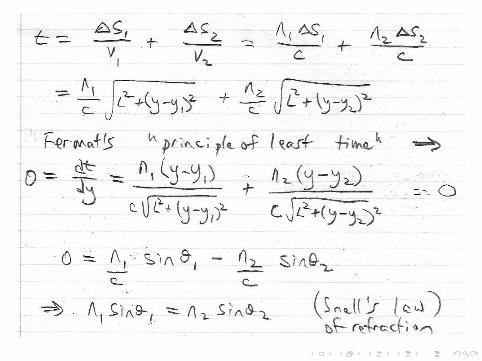
Fermat: light travels along “path of least time”
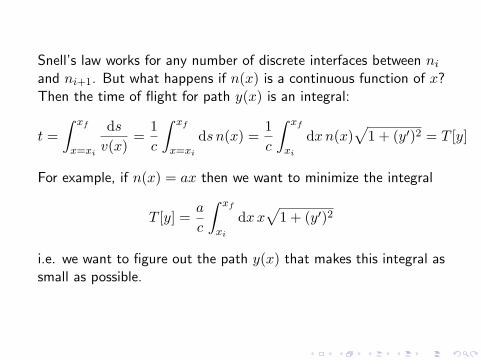
Snell’s law works for any number of discrete interfaces between niand ni+1. But what happens if n(x) is a continuous function of x?Then the time of flight for path y(x) is an integral:
t =∫ xf
x=xi
dsv(x)
=1c
∫ xf
x=xi
ds n(x) =1c
∫ xf
xi
dxn(x)√
1 + (y′)2 = T [y]
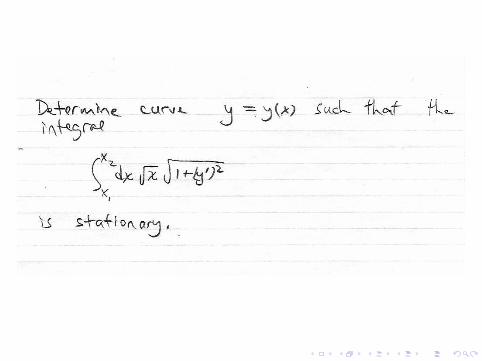
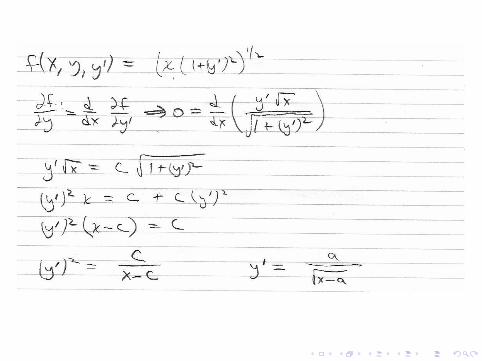
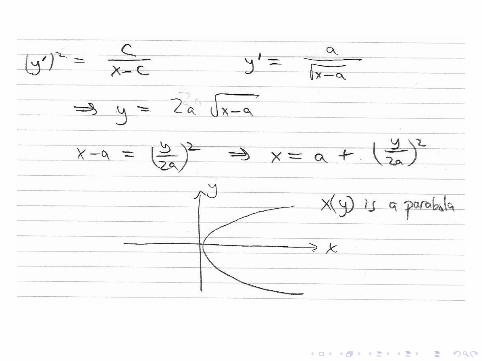
For example, if n(x) = ax then we want to minimize the integral
T [y] =a
c
∫ xf
xi
dxx√
1 + (y′)2
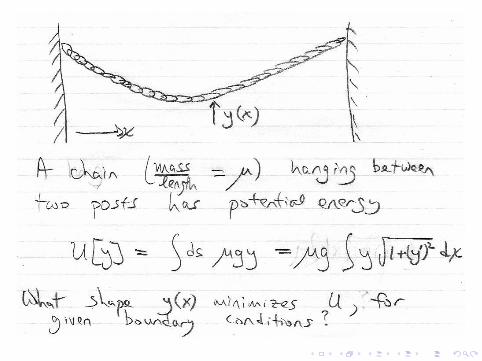
i.e. we want to figure out the path y(x) that makes this integral assmall as possible.
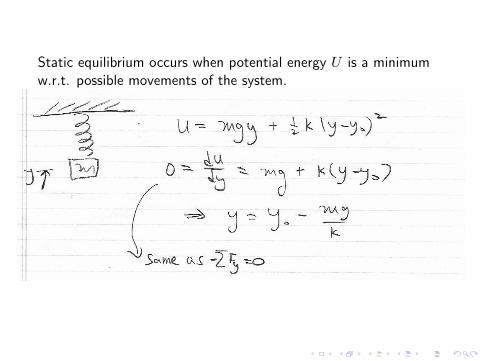
Static equilibrium occurs when potential energy U is a minimumw.r.t. possible movements of the system.

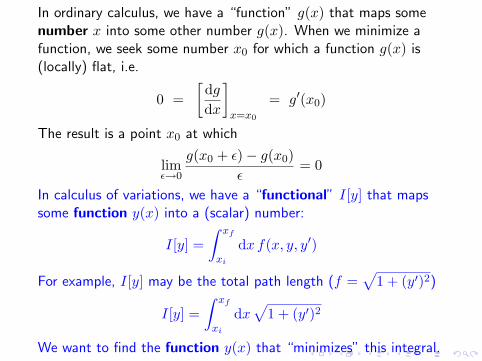
In ordinary calculus, we have a “function” g(x) that maps somenumber x into some other number g(x). When we minimize afunction, we seek some number x0 for which a function g(x) is(locally) flat, i.e.
0 =[
dgdx
]x=x0
= g′(x0)
The result is a point x0 at which
limε→0
g(x0 + ε)− g(x0)ε
= 0
In calculus of variations, we have a “functional” I[y] that mapssome function y(x) into a (scalar) number:
I[y] =∫ xf
xi
dx f(x, y, y′)
For example, I[y] may be the total path length (f =√
1 + (y′)2)
I[y] =∫ xf
xi
dx√
1 + (y′)2
We want to find the function y(x) that “minimizes” this integral.
Near the local minimum x0 of an ordinary function,
g(x0 + ε)− g(x0) = g′(x0) ε+O(ε2) = 0 +O(ε2)
In other words, when we change x by ε, the change in the functiong(x) has no first-order dependence on ε.
I[y] =∫ xf
xi
dx f(x, y, y′)
Let’s try varying y(x) and insist that “small” variations (∝ ε) iny(x) will cause no change in I to first order in ε.
Consider a “nearby” path Y (x, ε) = y(x) + εη(x).
But we insist that Y (x) coincide with y(x) at the endpoints, i.e.η(xi) = η(xf ) = 0.
I[Y ] =∫ xf
xi
dx f(x, Y, Y ′)
This I[Y ] is a function of ε, so we’ll write I(ε).
I(ε) = I(ε = 0) + ε
[dIdε
]ε=0
+O(ε2)
where I(ε = 0) is just I[y], i.e. where Y (x) = y(x). We want thered term to vanish when Y (x) = y(x), i.e. we want I(ε) to haveno first-order dependence on ε along the path for which ε = 0.
0 =[
dIdε
]ε=0
=[
ddε
∫ xf
xi
dx f(x, Y, Y ′)]ε=0
=∫ xf
xi
dx[∂f
∂Y
∂Y
∂ε+
∂f
∂Y ′∂Y ′
∂ε
]ε=0
(∗∗)
Annoyingly, ∂Y ′/∂ε = η′(x), while ∂Y/∂ε = η(x). We want towork on the second term to eliminate the η′(x) dependence, sothat both terms are multiplied by η(x), not η′(x). Notice that
ddx
(∂f
∂Y ′∂Y
∂ε
)=(
ddx
∂f
∂Y ′
)∂Y
∂ε+
∂f
∂Y ′
(d
dx∂Y
∂ε
)
ddx
(∂f
∂Y ′∂Y
∂ε
)=(
ddx
∂f
∂Y ′
)∂Y
∂ε+
∂f
∂Y ′
(d
dx∂Y
∂ε
)=(
ddx
∂f
∂Y ′
)∂Y
∂ε+
∂f
∂Y ′
(∂
∂ε
dYdx
)=(
ddx
∂f
∂Y ′
)∂Y
∂ε+
∂f
∂Y ′
(∂Y ′
∂ε
)Now integrating both sides,∫ xf
xi
dxd
dx
(∂f
∂Y ′∂Y
∂ε
)=[∂f
∂Y ′∂Y
∂ε
]xf
xi
=
=∫ xf
xi
dx(
ddx
∂f
∂Y ′
)∂Y
∂ε+∫ xf
xi
dx∂f
∂Y ′∂Y ′
∂ε
Then solving for the last term, we get∫ xf
xi
dx∂f
∂Y ′∂Y ′
∂ε=[∂f
∂Y ′∂Y
∂ε
]xf
xi
−∫ xf
xi
dx(
ddx
∂f
∂Y ′
)∂Y
∂ε
The boundary term is zero because ∂Y/∂ε = η(x), and byconstruction η(xi) = η(xf ) = 0.
[∂f
∂Y ′∂Y
∂ε
]xf
xi
=[∂f
∂Y ′η(x)
]xf
xi
=[∂f
∂Y ′
]η(xf )−
[∂f
∂Y ′
]η(xi) = 0
because η(xi) = η(xf ) = 0 by construction. So then∫ xf
xi
dx∂f
∂Y ′∂Y ′
∂ε= −
∫ xf
xi
dx(
ddx
∂f
∂Y ′
)∂Y
∂ε
Now we plug this into the (**) equation above (which = 0):∫ xf
xi
dx[∂f
∂Y
∂Y
∂ε+
∂f
∂Y ′∂Y ′
∂ε
]ε=0
=∫ xf
xi
dx[∂f
∂Y
∂Y
∂ε−(
ddx
∂f
∂Y ′
)∂Y
∂ε
]ε=0
Now remember that ∂Y/∂ε = η(x).
0 =∫ xf
xi
dx[η(x)
(∂f
∂Y− d
dx∂f
∂Y ′
)]ε=0
And that η(x) was an arbitrary function, as long as η(x) = 0 atthe two endpoints. Imagine η(x) zero everywhere except for asmall blip at x = x∗, where xi < x∗ < xf .
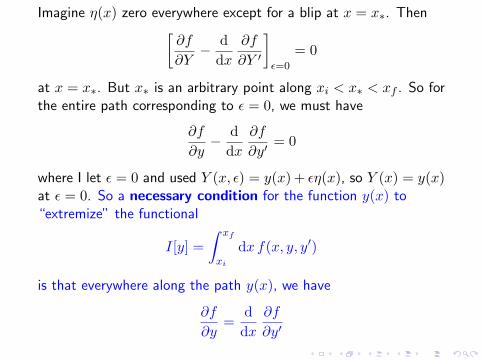
Imagine η(x) zero everywhere except for a blip at x = x∗. Then[∂f
∂Y− d
dx∂f
∂Y ′
]ε=0
= 0
at x = x∗. But x∗ is an arbitrary point along xi < x∗ < xf . So forthe entire path corresponding to ε = 0, we must have
∂f
∂y− d
dx∂f
∂y′= 0
where I let ε = 0 and used Y (x, ε) = y(x) + εη(x), so Y (x) = y(x)at ε = 0. So a necessary condition for the function y(x) to“extremize” the functional
I[y] =∫ xf
xi
dx f(x, y, y′)
is that everywhere along the path y(x), we have
∂f
∂y=
ddx
∂f
∂y′
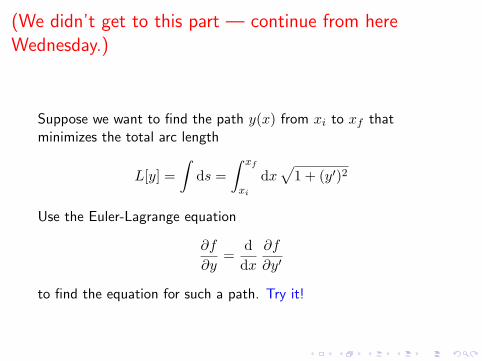
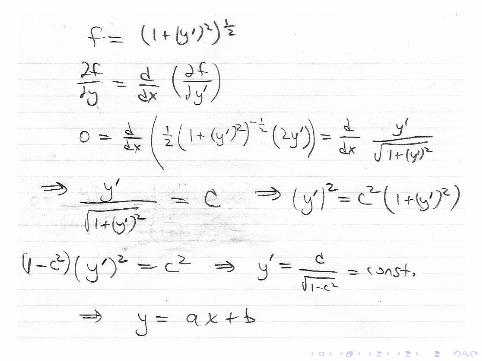
(We didn’t get to this part — continue from hereWednesday.)
Suppose we want to find the path y(x) from xi to xf thatminimizes the total arc length
L[y] =∫
ds =∫ xf
xi
dx√
1 + (y′)2
Use the Euler-Lagrange equation
∂f
∂y=
ddx
∂f
∂y′
to find the equation for such a path. Try it!
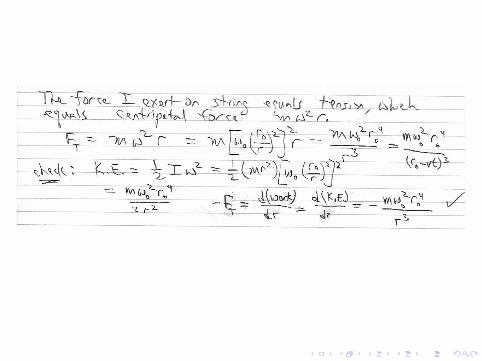
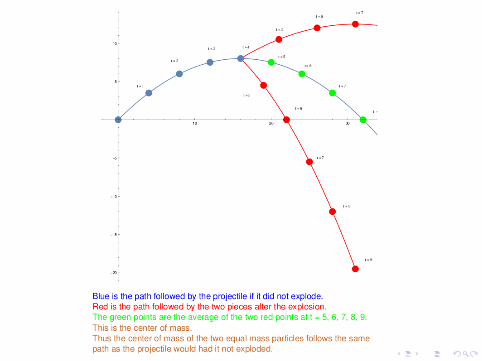
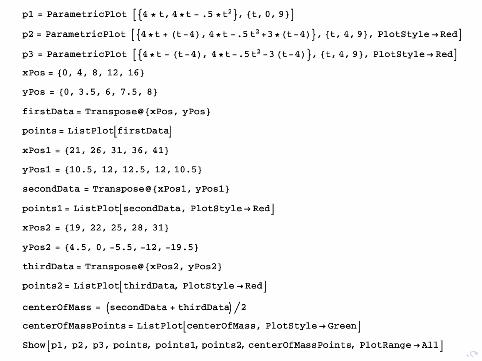
Example of using Mathematica for last week’s XC online (PDF andNB) in “files” area:
positron.hep.upenn.edu/p351/files/0202_nick_hw2ec.pdf
positron.hep.upenn.edu/p351/files/0202_nick_hw2ec.nb
Physics 351 — Monday, February 2, 2015
I HW #3 due Friday.
I Remember quiz Weds: basically one HW1 problem, ∼ 15 min.You can bring one sheet of paper, handwritten, one or bothsides.
I On HW3 XC1, I should add, “Use substitutionsin(φ/2) = Au, where A = sin(Φ/2).”





























